转向柱自动倾斜的滑板车
文献发布时间:2023-06-29 06:30:04
技术领域
本公开涉及具有两个前轮的滑板车,更具体地,涉及具有由转向柱控制的两个前轮的滑板车,该转向柱与转向机构联接,使得当转向柱枢转时,转向机构使转向柱的倾斜同步以朝向转弯曲线的内周缘倾斜。滑板车还可以是折叠式滑板车。
背景技术
滑板车是一种通常尺寸较小的交通工具,允许骑乘者在不使用时用手携带,并且在某些情况下,还能够从行驶位置折叠成随身/存放位置,反之亦然(后文也称为“折叠”)。
Amir Zaid等人的美国专利US 9272739公开了一种滑板车,包括板面部,其安装在一对前轮上;至少一个尾部,其可折叠地联接到板面部且比板面部窄,并且安装在至少一个后轮上从而为板面部提供稳定性。滑板车还包括转向柱,其联接到前轮并相对于板面部是可折叠的。
Costel Dragomir的美国专利US 10322767公开了一种改进的踏板驱动滑板车,其可以具有主框架、关节框架、前平衡和转向机构、一个或两个前转向轮、后驱动轮和驱动机构。踏板被向后推动并在可调角度范围内相互独立移动。驱动机构将踏板的交替运动转化为进一步倍增的单向旋转,并驱动真正的车轮。倾斜控制机构允许骑乘者在车辆停止时保持骑乘状态。滑板车可以折叠,关节框架在两端枢转,使得后轮停靠在前轮之间或附近,并且滑板车可以像随身行李一样携带。滑板车还可以借助连接前转向机构的下部和上部的折叠铰链进一步折叠以用于存放。本文在说明书和权利要求书中使用的术语“滑板车”用于表示各种车辆、滑板车、机动滑板车、轻便摩托车等中的任意一种,或具有转向柱和至少两个前轮的任意运输装置, 以用于运载一个以上的骑乘者。
现有技术的滑板车的缺点之一是这种车辆的尺寸小,可能导致骑乘不安全。一些现有技术的滑板车在转弯时,转向柱保持直立方向。因此,通常,当骑乘具有两个前轮的车辆并转弯时, 由于离心力,布置在转弯曲线的内周缘的车轮往往会失去对道路的抓地力,包括在空中被抬起。此外,前轮朝向转弯曲线的内周缘倾斜, 以进一步失去对道路的抓地力。
因此,需要并且有利的是具有一种机构,在以合理速度骑乘时,当驾驶员使转向柱枢转进行转弯时,该机构会自动并同步地使转向柱朝向转弯曲线的内周缘倾斜,同时保持两个前轮直立方向。更有利的是,滑板车可折叠并存放起来,或者放在手推车中可以像随身行李一样携带。
发明内容
除非另有定义,否则本文使用的所有技术和科学术语与本公开所属领域的普通技术人员通常理解的含义相同。本文提供的材料、方法和示例仅是说明性的,并不旨在限制。本公开可以在测试或实践中使用与本文描述的方法和材料等同或相似的方法和材料来实施。
如本文所使用的,提及项目列表中的“至少一个”的短语是指那些项目的任意组合,包括单个成员。例如,“a、b或c”中的至少一个旨在涵盖:a、b、c、a-b、a-c、b-c和a-b-c。
实施例是本公开的示例或实施方式。“一个实施例”、“实施例”或“一些实施例”的各种出现不一定都指代相同的实施例。尽管可以在单个实施例的上下文中描述本公开的各个方案,但是也可以单独地或以任意合适的组合提供这些方案。相反地,虽然为了清楚起见,本文可以在单独的实施例的上下文中描述本公开,但是本公开也可以在单个实施例中实施。
说明书中对“一个实施例”、“实施例”、“一些实施例”或“其他实施例”的引用意味着结合这些实施例描述的特定特征、结构、特性或其他方面包括在至少一个实施例中,但不一定是本公开的所有实施例。应当理解,本文所用的措辞和术语不应被解释为限制性的并且仅用于描述性目的。
应当注意,与方向相关的描述,如“底部”、“上”、“上部”、“下”、“下部”、“顶部”、“前”、“后”、“右”、“左”等,假定滑板车在表面上可操作地展开并且被定向为向前移动,其中滑板车的转向柱相对于滑板车所在的表面处于笔直、直立的位置。例如,前视图是指:从滑板车的前端看;左侧为站在滑板车的站立板上的骑乘者的左侧。
根据本公开的教导,提供了一种滑板车设备,包括:
a) 转向组件,其包括:
i) 可枢转的转向柱,其具有枢转轴线;
ii) 车把,其牢固地附接至所述转向柱;
iii) 一对前轮;
iv) 转向机构,其被构造为使所述前轮转向;
v) 车轮枢转机构,其被构造为使所述一对前轮枢转; 以及
vi) 转向倾斜组件,其被构造为:在枢转所述转向柱时,使所述转向柱朝向转弯曲线的内周缘同步倾斜,其中,所述转向柱的朝向转弯曲线的内周缘的所述倾斜的速率与所述转向柱的枢转速率成比例地/直接相关;
b) 板面组件,其包括:
i) 站立板,其被构造为支撑站立在其上的骑乘者的双脚; 以及
ii) 后轮组件,其包括至少一个后轮; 以及
c) 接口组件,其将所述板面组件与所述转向组件互相连接。
可选地,转向柱包括上柱和下柱。优选地,所述上柱和所述下柱可伸缩地互相连接。
优选地,转向倾斜组件包括:
a) 倾斜同步组件,其被构造为:在围绕所述转向柱的所述枢转轴线枢转所述转向柱时,同步地倾斜可枢转的所述转向柱;
b) 枢转框架元件; 以及
c) 非枢转框架元件,
其中,所述枢转框架元件被构造为围绕所述非枢转框架元件枢转,从而允许所述转向柱的倾斜运动。
可选地,所述倾斜同步组件包括:
a) 倾斜同步单元,至少一对截头旋转锥,所述截头旋转锥具有倾斜周缘和锥体旋转轴线;
b) 柱接口部分,其具有与所述转向柱的所述枢转轴线重合的旋转轴线;
c) 枢转接收连杆部件; 以及
d) 同步主体,其具有一对拱形壁,
其中,所述转向柱牢固地附接至所述倾斜同步单元的所述柱接口部分;
其中,所述同步主体的所述一对拱形壁为:壁厚为W1且轴线与所述转向柱的所述枢转轴线重合的拱形管壁;
其中,所述同步主体的所述拱形管壁的底部以角度α被对角地截头,形成一对平面,其中所述平面中的每一个也相对于所述转向柱的所述枢转轴线横向倾斜,朝向所述转向柱的所述枢转轴线,以角度β向下,从所述拱形管壁的周缘向内延伸;
其中,所述一对截头旋转锥被构造为围绕牢固地附接至所述非枢转框架元件的相应固定轴自由旋转;
其中,所述倾斜平面被构造为在所述截头旋转锥的所述倾斜周缘上滚动;并且
其中,在通过在所述转向柱上施加枢转力来枢转所述转向柱时:
a) 固定在所述转向柱上的所述倾斜同步单元也枢转;并且
b) 由于倾斜平面的角度α,在相应的平面在相应的截头旋转锥上滚动时,一个拱形壁向上移动,并且在相应的平面在另一个截头旋转锥上滚动时,另一个拱形壁向下移动,
其中,在所述转向柱枢转的同时,一个拱形壁向上移动,并且另一个拱形壁向下移动,所述转向柱朝向向下移动的所述拱形壁的一侧倾斜。
可选地,校准机构被构造为校准所述倾斜平面中的每一个与所述截头旋转锥的相应的所述倾斜周缘之间的摩擦。角度α可以沿着倾斜平面变化。
优选地,所述转向倾斜组件还包括一对平衡致动器,各个平衡致动器均具有下端部和上端部。所述平衡致动器的所述下端部在相应的位置处牢固地连接至所述非枢转框架元件,所述平衡致动器的上端部在相应位置处牢固地连接至所述枢转框架元件。所述平衡致动器被构造为致动所述非枢转框架元件和所述枢转框架元件之间的相对旋转驱动力,并且施加反向于施加到所述转向柱的枢转力的转向柱返回力。
可选地,这对相似的平衡致动器安装在共同的水平承载杆上,具有第一端部止动件和第二端部止动件,所述水平承载杆与位于所述水平承载杆的所述第一端部和所述第二端部之间的阻尼器单元的内部杆是共同的,
其中,所述阻尼器用作止动件,牢固地附接至所述非枢转框架元件;并且
其中,所述端部止动件用作附接至所述转向机构的移动元件的力接收端部,其中,所述转向机构的所述移动元件与所述转向柱围绕所述枢转轴线的枢转运动直接相关。
可选地, 当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中枢转的所述车轮保持直立方向,并且其中枢转的所述车轮中的每一个围绕相应的独立轴枢转。
可选地, 当以合理地速度行驶时, 当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中两个车轮稳固地保持在道路上。
优选地,所述至少一个后轮是机动的,其中所述动力电机可以向前或向后驱动滑板车设备。
站立板附接于枢转框架元件,使得当枢转框架元件倾斜时,站立板朝向转弯曲线的内周缘向一侧倾斜。
可选地,所述动力电机和所述一对前轮促进所述滑板车设备在没有任何支撑的情况下静止不动并自动行驶,其中,所述滑板车还可以包括自动驾驶机构,包括:
a. 自动电机;
b. 旋转传动杆; 以及
c. 旋转接收杆,
其中,所述自动电机布置在所述转向柱的所述上柱内部;
其中,所述旋转接收杆固定至所述转向柱的下柱;
其中,在非自动驾驶时,所述旋转传动杆和所述旋转接收杆操作性地脱离;
其中,通过将所述上柱在所述下柱上(或内部)向下移动,直到所述旋转传动杆与所述旋转接收杆接合,所述旋转传动杆和所述旋转接收杆可操作地接合;并且
其中,通过激活所述自动电机,能够向前或向后驱动滑板车。
所述自动驾驶机构还包括从包括相机、GPS、控制器和用于远程通信的装置的装置的集合中选择的附加的添加装置。
优选地,所述接口组件通过至少一个枢转连接与所述板面组件互相连接,并且通过至少一个枢转连接与所述转向组件互相连接,并且其中所述枢转连接促进将滑板车从展开位置折叠到折叠状态, 以及从折叠状态到展开位置。
优选地,滑板车设备还包括展开位置锁定机构,其被构造为在处于展开位置时,锁定所述枢转连接。
优选地,滑板车设备还包括折叠状态锁定机构,其被构造为在处于折叠位置时,锁定所述枢转连接。
所述展开位置锁定机构可包括:
a.至少一个板面锁定销,其被构造为锁定所述接口组件和所述板面组件之间的枢转运动;
b. 至少一个柱锁定销,其被构造为锁定所述接口组件和所述转向组件之间的枢转运动;
c. 折叠手柄; 以及
d. 线缆子系统,其牢固地附接至所述折叠手柄,
其中,所述线缆子系统被构造为当所述折叠手柄被激活时,解锁所述至少一个板面锁定销和所述至少一个柱锁定销。
优选地,各个所述板面锁定销和柱锁定销包括具有锁定端部的锁定销单元以及偏置元件,其中,当从折叠状态折叠到展开位置时,锁定销单元抵抗所述偏置元件向回移动,直到锁定端部自由进入接收开口,从而被推入所述接收开口并将锁定销单元锁定在其中,从而防止所述接口组件和所述板面组件之间以及所述接口组件和所述转向组件之间的枢转运动。
可选地,板面组件包括具有板型材(board-profile)的板面框架,其中一个以上的第一磁体附接至至少板型材和折叠手柄。接口组件可包括接口型材臂(interfacing-profile-arm),其中一个以上的互补磁体附接至至少一个接口型材臂,其中滑板车处于折叠状态,一个以上的第一磁体和相应的一个以上的互补磁体预先构造为相邻设置,从而形成互磁力,并通过形成的互磁力将滑板车保持在折叠状态。
可选地,所述折叠手柄具有延伸的尾端,其中,当滑板车处于锁定折叠状态并且折叠手柄被激活时,延伸的尾端压靠转向柱的外表面,从而克服形成的磁力,并将相邻的第一磁体和相应的互补磁体分开,进入解锁折叠状态。
滑板车设备还可以包括可拆卸的实用工具箱,其中滑板车优选地被构造为从展开位置折叠到折叠状态,包括当可拆卸的实用工具箱附接至滑板车上时。
根据本公开的进一步教导,提供了一种转向倾斜组件,其包括:
a.倾斜同步组件,其包括:
i.倾斜同步单元;
ii. 截头旋转锥,其具有倾斜周缘; 以及
iii. 锥体旋转轴线和包括固定轴的枢转接口单元,其中所述截头旋
转锥可旋转地安装在所述固定轴上;
b. 倾斜输送单元; 以及
c. 非枢转框架元件,
其中,所述倾斜输送单元被构造为围绕所述非枢转框架元件枢转,从而允许所述转向柱的倾斜运动;
其中,所述枢转接口单元包括:
a.柱接口部分,其具有与所述转向柱的所述枢转轴线重合的旋转轴线;
b. 枢转接收连杆臂,其牢固地附接至所述倾斜输送单元;
c. 旋转锥连杆臂; 以及
d. 旋转锥连杆组件,其包括固定轴,其中所述截头旋转锥可旋转地安装在所述固定轴上,
其中,所述倾斜同步单元包括:
a. 一对平行的细长拱形肋, 当转向柱处于直立位置时具有初始倾斜角,所述细长拱形肋包括:顶部拱形肋和底部拱形肋,其中所述拱形肋中的每一个具有相应的内平面,其向内横向倾斜,远离所述转向柱,在所述顶部拱形肋和所述底部拱形肋之间形成间隙,其中, 内部拱形间隙D
其中,所述倾斜同步单元牢固地附接至所述非枢转框架元件;
其中,所述转向柱牢固地附接至所述枢转接口单元的所述柱接口部分;
其中,所述一对拱形肋是拱形的并且具有W2的深度和与所述转向柱的所述枢转轴线可操作地重合的横向轴线;
其中,所述截头旋转锥的斜面和所述内平面的斜面可操作地具有相同的角度γ;
其中,所述倾斜同步单元和所述枢转接口单元可操作地通过接口连接,使得所述截头旋转锥布置在所述顶部拱形肋和所述底部拱形肋之间,允许所述截头旋转锥,在形成于所述顶部拱形肋的所述内平面与所述底部拱形肋的所述内平面之间的内部空间中, 自由且适配地滚动;
其中, 当通过在所述转向柱上施加枢转力而枢转所述转向柱时,则:
a. 牢固地附接至所述非枢转框架元件的所述倾斜同步单元不随所述转向柱枢转;
b. 牢固地附接至所述转向柱和所述枢转框架元件的所述枢转接口单元与所述转向柱一起枢转;
c. 由于所述截头旋转锥能够在形成于所述顶部拱形肋的所述内平面与所述底部拱形肋的所述内平面之间的内部空间中自由且适配地滚动,所述截头旋转锥在形成于所述顶部拱形肋的所述内平面和所述底部拱形肋的所述内平面之间的内部空间内滚动;并且
d. 由于枢转接收连杆牢固地附接至倾斜输送单元,并且由于倾斜输送单元被构造为围绕非枢转框架元件枢转,从而当所述转向柱枢转时, 允许所述转向柱的倾斜运动;并且
其中,在所述转向柱枢转的同时,所述枢转接收连杆臂也枢转,导致所述倾斜输送单元围绕非枢转框架元件枢转,从而将所述转向柱倾斜至所述转向柱枢转的一侧。
可选地,校准机构被构造为校准所述内平面中的每一个与所述截头旋转锥的所述倾斜周缘之间的摩擦。
可选地,这对相似的平衡致动器各自具有下端部和上端部,安装在共同的竖直承载杆上,所述竖直承载杆以下杆端部和上杆端部作为所述止动件端部,并且其中,一对端部止动件限制所述平衡致动器的运动,所述平衡致动器在所述竖直承载杆上布置在所述端部止动件之间;
其中,所述平衡致动器由布置在其间的力输送环分隔开,所述力输送环是用于两个平衡致动器的所述力接收端部,其中所述力输送环牢固地附接至所述倾斜输送单元,是所述枢转框架元件,并且其中所述力输送环从所述倾斜输送单元收沿所述竖直承载杆并且朝向所述平衡致动器中的任一个的力运动矢量;并且
其中,所述竖直承载杆的所述下杆端部牢固地连接至所述非枢转框架元件。
可选地,所述站立板附接至所述倾斜输送单元,并且其中, 当所述倾斜输送单元倾斜时,所述站立板朝向转弯曲线的内周缘向一侧倾斜。
可选地,当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中,枢转的所述车轮保持直立方向。通常,枢转的所述车轮中的每一个围绕相应的独立轴枢转。
可选地,当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中,两个车轮稳固地保持在道路上。
可选地,速度偏置电机被构造为枢转倾斜同步单元,从而偏置转向柱的倾斜角度。
根据本公开的进一步教导,提供了一种滑板车设备,其中转向倾斜组件包括:
a.倾斜同步组件,其包括:
i.倾斜同步单元;
ii. 可安装拱形肋; 以及
iii. 枢转接口单元,其包括固定轴,其中所述可安装拱形肋固定地安
装在所述固定轴上;
b. 倾斜输送单元; 以及
c. 非枢转框架元件,
其中,所述倾斜输送单元被构造为围绕所述非枢转框架元件枢转,从而允许所述转向柱的倾斜运动;
其中,所述枢转接口单元包括:
a.柱接口部分,其具有与所述转向柱的所述枢转轴线重合的旋转轴线;
b. 枢转接收连杆臂,其牢固地附接至所述倾斜输送单元;
c. 拱形肋连杆臂; 以及
d. 拱形肋连杆组件,其被构造为在其上安装所述可安装拱形肋,
其中,所述倾斜同步单元包括:
a.至少一个具有倾斜周缘的上截头旋转锥和至少一个具有倾斜周缘的下截头旋转锥,上截头旋转锥和下截头旋转锥向内横向倾斜,远离所述转向柱,其中,在所述至少一个上截头旋转锥和至少一个下截头旋转锥之间形成的内部锥形间隙D
其中,所述倾斜同步单元牢固地附接至所述非枢转框架元件;
其中,所述转向柱牢固地附接至所述枢转接口单元的所述柱接口部分;
其中,所述可安装拱形肋是拱形的并且具有W3的深度和与所述转向柱的所述枢转轴线可操作地重合的横向轴线;
其中,所述截头旋转锥的周缘斜面与可安装拱形肋的倾斜上平面和倾斜下平面以相同的角度γ倾斜;
其中,所述倾斜同步单元和所述枢转接口单元可操作地通过接口连接,使得所述可安装拱形肋布置在所述至少一个上截头旋转锥和至少一个下截头旋转锥之间,允许所述可安装拱形肋在形成于所述至少一个上截头旋转锥和至少一个下截头旋转锥之间的内部空间内部,横向移动;
其中, 当通过在所述转向柱上施加枢转力而枢转所述转向柱时,则:
a.牢固地附接至所述非枢转框架元件的所述倾斜同步单元不随所述转向柱枢转;
b.牢固地附接至所述转向柱和所述枢转框架元件的所述枢转接口单元与所述转向柱一起枢转;
c. 由于所述截头旋转锥能够在形成于所述顶部拱形肋的所述内平面与所述底部拱形肋的所述内平面之间的内部空间中自由且适配地滚动,所述可安装拱形肋在所述至少一个上截头旋转锥与至少一个下截截旋转锥之间滑动;并且
d. 由于枢转接收连杆牢固地附接至倾斜输送单元,并且由于倾斜输送单元被构造为围绕非枢转框架元件枢转,从而当所述转向柱枢转时, 允许所述转向柱的倾斜运动;并且
其中,在所述转向柱枢转的同时,所述枢转接收连杆臂也枢转,导致所述倾斜输送单元围绕非枢转框架元件枢转,从而将所述转向柱倾斜至所述转向柱枢转的一侧。
可选地,校准机构被构造为校准所述内平面中的每一个与所述截头旋转锥的所述倾斜周缘之间的摩擦。
可选地,所述一对相似的平衡致动器各自具有下端部和上端部,安装在共同的竖直承载杆上,所述竖直承载杆以下杆端部和上杆端部作为所述止动件端部,并且其中,一对端部止动件限制所述平衡致动器的运动,所述平衡致动器在所述竖直承载杆上布置在所述端部止动件之间;
其中,所述平衡致动器由布置在其间的力输送环分隔开,所述力输送环是用于两个平衡致动器的所述力接收端部,其中所述力输送环牢固地附接至所述倾斜输送单元,是所述枢转框架元件, 并且其中所述力输送环从所述倾斜输送单元接收沿所述竖直承载杆并且朝向所述平衡致动器中的任一个的力运动矢量; 并且
其中,所述竖直承载杆的所述下杆端部牢固地连接至所述非枢转框架元件。
可选地,所述站立板附接至所述倾斜输送单元,并且其中, 当所述倾斜输送单元倾斜时,所述站立板朝向转弯曲线的内周缘向一侧倾斜。
可选地,当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中,枢转的所述车轮保持直立方向,并且其中,枢转的所述车轮中的每一个围绕相应的独立轴枢转。
可选地,当所述转向柱枢转时,所述车轮枢转机构枢转所述前轮,其中,两个车轮稳固地保持在道路上。
可选地,速度偏置电机被构造为枢转倾斜同步单元,从而偏置转向柱的倾斜角度。
根据本公开的进一步教导,提供了一种滑板车设备,其中所述一对相似的平衡致动器安装在共同的水平承载杆上, 具有第一端部止动件和第二端部止动件,所述水平承载杆与位于所述水平承载杆的所述第一端部和所述第二端部之间的阻尼器单元的内部杆是共同的,
其中,所述阻尼器用作止动件,牢固地附接至所述非枢转框架元件; 并且
也用作用于两个平衡致动器的力接收端部;其中,水平承载杆的第一端部用作止动件,牢固地附接至非枢转框架元件; 并且
其中,所述端部止动件用作附接至所述转向机构的移动元件的力接收端部,其中,所述转向机构的所述移动元件与所述转向柱围绕所述枢转轴线的枢转运动直接相关。
根据本公开的进一步教导,滑板车设备还可以包括滑板车折叠接口组件,其被构造为在展开位置或折叠状态时,锁定所述枢转连接,其中,所述滑板车折叠接口组件包括:
a.接口型材臂,其包括具有后型材端部的后接头接口元件和具有前型材端部的前接头接口元件;
b. 后枢转接头,其枢转地安装在后铰链轴上;
c. 前枢转接头,其枢转地安装在前铰链轴上; 以及
d. 线缆子系统,
其中,所述接口型材臂的所述后型材端部枢转地连接至所述后枢转接头,并且所述后枢转接头牢固地附接至所述板面组件,促进了所述接口型材臂和所述板面组件之间的枢转运动;并且
其中,所述接口型材臂的所述前型材端部枢转地附接至所述前枢转接头,并且所述前枢转接头牢固地附接至所述倾斜输送单元,促进了所述接口型材臂和所述转向机构之间的枢转运动。
可选地,所述线缆子系统包括从包括传动带、正时皮带和与一对嵌齿轮联接的链条的集合中选择的张紧线缆。
可选地,所述线缆子系统包括:非弹性张紧线缆;
a.固定前线轮; 以及
b.枢转后线轮,
其中,所述张紧线缆缠绕在所述固定前线轮及所述枢转后线轮上;
其中,所述张紧线缆锚固到所述固定前线轮和所述枢转后线轮;
其中,所述后枢转接头包括后轴保持铰链装置和后环形元件,并且其中,所述后轴保持铰链装置牢固地附接至所述后型材端部,促进了所述接口型材臂相对于所述后轴保持铰链装置的枢转运动;并且
其中,所述前枢转接头包括前轴保持铰链装置和前环形元件,并且其中,所述前轴保持铰链装置牢固地附接至所述前型材端部,促进了所述接口型材臂相对于所述前轴保持铰链装置的枢转运动。
可选的,所述滑板车折叠接口组件还包括用于自动折叠或展开所述滑板车折叠接口的折叠电机,其中,所述折叠电机可操作地与所述张紧线缆接合。
可选地,所述后线轮的直径比所述前线轮的直径小预定比例,从而使所述滑板车折叠接口组件和所述板面组件的运动路径处于预先构造的同步休止状态,作为折叠状态。
可选地,所述枢转后枢转接头和所述枢转前枢转接头各自包括展开的接收腔和折叠的接收腔,各个接收腔被构造为接收相应的闩锁螺栓的相应的锁定端部;其中,所述展开的接收腔中的每一个被构造为当滑板车设备处于所述展开位置时,接收相应的闩锁螺栓的相应的锁定端部,并且其中所述折叠的接收腔中的每一个被构造为当滑板车设备处于所述折叠状态时,接收相应的闩锁螺栓的相应的锁定端部。
可选地,所述接口型材臂包括:
a. 后下锁定机构; 以及
b. 前上锁定机构,
其中,所述后下锁定机构包括:
a.后下闩锁螺栓,其被构造为被驱动进入或离开所述展开的接收腔或所述折叠的接收腔; 以及
b. 后下部电机,
其中,所述下部电机被构造为旋转所述下闩锁螺栓; 并且
其中, 当所述下部电机沿第一方向驱动所述下闩锁螺栓时,所述下闩锁螺栓被驱动进入所述展开的接收腔或进入所述折叠的接收腔,从而将所述后枢转接头锁定在所选状态; 并且当所述下部电机沿第二方向驱动所述下闩锁螺栓时,所述下闩锁螺栓被驱动离开所述展开的接收腔或离开所述折叠的接收腔,从而解锁所述后枢转接头,
其中,所述前上锁定机构包括:
a.前上闩锁螺栓,其被构造为被驱动进入或离开所述展开的接收腔或所述折叠的接收腔;
b. 前上部电机,
其中,所述上部电机被构造为旋转所述上闩锁螺栓; 并且
其中, 当所述下部电机沿第一方向驱动所述上闩锁螺栓时,所述下闩锁螺栓被驱动进入所述展开的接收腔或进入所述折叠的接收腔,从而将所述前枢转接头锁定在所选状态; 并且当所述上部电机沿第二方向驱动所述上闩锁螺栓时,所述上闩锁螺栓被驱动离开所述展开的接收腔或离开所述折叠的接收腔,从而解锁所述前枢转接头。
可选地,所述枢转后枢转接头和所述枢转前枢转接头各自包括展开的接收腔和折叠的接收腔,各个接收腔被构造为接收相应的闩锁连杆装置的相应的锁定端部;其中,所述展开的接收腔中的每一个被构造为当滑板车设备处于所述展开位置时,接收相应的闩锁连杆装置的相应的锁定端部, 并且其中所述折叠的接收腔中的每一个被构造为当滑板车设备处于所述折叠状态时,接收相应的闩锁连杆装置的相应的锁定端部。
可选地,所述接口型材臂包括:
a.后下连杆锁定机构;
b. 前上连杆锁定机构;
c. 具有枢转轴线的摆动轴连杆; 以及
d. 折叠连杆枢转手柄或折叠连杆枢转电机,
其中,所述后下锁定连杆机构包括:
a.后下闩锁连杆装置,其被构造为被驱动进入或离开所述展开的接收腔或所述折叠的接收腔; 以及
b. 中间臂连杆,其在后下端部处枢转地连接至所述下闩锁连杆装置,
其中,所述下闩锁连杆装置包括锁定销外壳和锁定偏置装置,锁定销外壳容纳所述下闩锁连杆装置,锁定偏置装置被构造为将所述下闩锁连杆装置推向所述展开的接收腔或所述折叠的接收腔;
其中,所述中间臂连杆被构造为驱动所述下闩锁连杆装置进入或离开所述展开的接收腔或所述折叠的接收腔;并且
其中,所述中间臂连杆被构造为接收来自所述摆动轴连杆的枢转运动,在上端部处枢转地连接至所述摆动轴连杆上;
其中,所述前上连杆锁定机构包括:
a.前上闩锁连杆装置,其被构造为被驱动进入或离开所述展开的接收腔或所述折叠的接收腔; 以及
b. 中间臂连杆,其在后上端部处枢转地连接至所述上闩锁连杆装置,
其中,所述中间臂连杆被构造为驱动所述上闩锁连杆装置进入或离开所述展开的接收腔或所述折叠的接收腔;并且
其中,所述中间臂连杆被构造为接收来自所述摆动轴连杆的枢转运动,在上端部处枢转地连接至所述摆动轴连杆上;
其中,所述摆动轴连杆被构造为,通过所述折叠连杆枢转手柄手动地或通过所述折叠连杆枢转电机, 围绕所述相应枢转轴线枢转;
其中, 当所述摆动轴连杆抵抗所述锁定偏置装置枢转时,相应的锁定端部被拉出相应的展开的接收腔或相应的折叠的接收腔,从而解锁所述后枢转接头和所述前枢转接头,并且当所述滑板车根据需要到达展开位置或所述折叠状态时,所述锁定偏置装置驱动所述进入所述展开的接收腔和/或所述折叠的接收腔。
可选地,所述后轮组件还包括后轮盖,其中,所述后轮盖被构造为保护所述后轮、用作制动机构,和/或用作支架。
附图说明
在此参照附图通过非限制性示例的方式描述本公开。现在详细地具体参照附图,要强调的是,所示的细节是通过示例的方式并且仅出于对本公开的实施例的说明性讨论的目的,并且被呈现是为了提供被认为是对本公开的原理和构思方面的最有用和最容易理解的描述。就此而言, 除了对本公开的基本理解所必需的之外,并未尝试更详细地显示本公开的结构细节,结合附图进行的描述使本领域技术人员清楚本公开的几种形式如何在实践中实施。在图中:
图1示意性地图示出了根据本公开的方案的滑板车的非限制性示例,滑板车包括转向柱、板面组件、转向机构、后轮组件和可选的可拆卸袋,其中转向柱处于笔直、直立的位置。
图2示意性地图示出了图1所示的滑板车的非限制性示例,其中转向柱处于左转瞬时位置。
图3是图2所示滑板车的后视立体示意图,其中转向柱向右枢转,从而也向右倾斜。
图4是图3所示的滑板车的前部分的俯视立体示意图。
图5a是图1所示的滑板车的前视图,其中仅出于可见性的目的,一些部件被移除以仅为了图示的目的。
图5b是图5a所示的滑板车的转向机构的前视示意图,其中主要示出了参与促进滑板车向左或向右转弯的部件。
图6a是图1所示的滑板车的转向机构的前视图,其中仅出于可见性的目的,一些遮挡部分已被移除以仅用于图示的目的,并且其中滑板车被示出为处于左转瞬时位置。
图6b是图6a所示滑板车的转向机构的前视示意图,其中示出了参与滑板车向左或向右转弯的主要部件。
图7a和图7b图示出了转向倾斜组件的前视立体立面图, 以示出枢转框架元件和非枢转框架元件之间的相互关系。
图7c是如图7b所示的详细视图A,示出了倾斜同步单元的示意图。
图8a是倾斜同步单元的前视示意图,滑板车处于笔直、直立的位置。
图8b是图8a所示的倾斜同步单元的侧视立面图。
图8c是图8a所示的倾斜同步单元的仰视立体图。
图9a是图8a中所示的倾斜同步单元的前视示意图,其中倾斜同步单元分别与一对截头旋转锥可操作地配对。
图9b是图8b中所示的倾斜同步单元的侧视立面示意图,其中倾斜同步单元分别与一对截头旋转锥可操作地配对。
图10a是倾斜同步单元的前视示意图,示出了滑板车示例性地处于左转瞬时位置。
图10b是图10a所示的倾斜同步单元的后视立体图。
图11a是图10a中所示的倾斜同步单元的前视示意图,其中倾斜同步单元分别与一对截头旋转锥可操作地配对。
图11b是图10b中所示的倾斜同步单元的后视立体图,其中倾斜同步单元分别与一对截头旋转锥可操作地配对。
图12a是根据本公开实施例的折叠后的滑板车的前视立体示意图。
图12b是折叠后的滑板车的后视立体图,其中在使用折叠手柄解锁板面组件和一对接口型材臂之后,促进了折叠过程。
图13a是根据本公开实施例的处于折叠状态的折叠后的滑板车的前视立体示意图,其中滑板车还包括被构造为附接至转向柱的实用工具箱,包括处于折叠状态。
图13b是图13a所示的折叠后的滑板车的侧视图。
图14a是根据本公开实施例的滑板车下部的侧视示意图,其中滑板车处于初始折叠阶段,并且其中向上拉起折叠手柄启动折叠过程。
图14b是根据本公开实施例的滑板车的下部的后视立面立体示意图,其中折叠手柄已被向上拉起以启动折叠过程。
图15a是根据本公开实施例的滑板车的下部的后视立面立体示意图,其中所示的视图是有助于滑板车的折叠过程的锁定/解锁机构的特写视图。
图15b图示出了如图15a所示的滑板车的下部,其中接口型材臂被移除以仅用于图示的目的。
图15c图示出了如图15a所示的滑板车的下部,其中站立板被移除以仅用于图示的目的。
图16a是侧视截面图,示意性地图示出了根据本公开实施例的滑板车的前部,其中接合型材臂被移除以仅用于图示的目的。
图16b是侧视截面图,示意性地图示出了锁定销组件,其中一些部件被移除以仅用于图示的目的。
图16c是根据本公开实施例的锁定销单元的前视立体图。
图16d是示意性地图示出了图16a中所示的滑板车的前部的侧视截面图,其中锁定销单元被示出为处于锁定状态。
图16e是示意性地图示出了图16a中所示的滑板车的前部的侧视截面图,其中锁定销单元被示出为处于解锁状态。
图17a是图13a所示的折叠后的滑板车的后视立面立体图。
图17b是作为示例的实用工具箱的后视立体图,该实用工具箱被构造为一体地附接至本公开的滑板车上。
图17c是根据本公开实施例的滑板车的前视图,示例性地示出了肩部螺栓被构造为通过在相应的肩部螺栓上滑动来锁定,相应的铰链在所述肩部螺栓上固定到实用工具箱。
图18是示意性地图示出根据本公开的一些实施例的滑板车的后部的侧视仰视立体图,其中滑板车还包括右板型材和左板型材,并且其中第一磁体在预先构造的位置处附接至右板型材和左板型材中的每一个。
图19是示意性地图示出如图18中的滑板车的前部的后视仰视立体图,其中一个以上的互补磁体在预先构造的位置处附接至右接口型材臂和左接口型材臂中的每一个。
图20是示意性地图示出处于折叠状态的如图18中的滑板车的中心部的后视立体图,其中折叠手柄具有延伸的尾端,该尾端延伸靠近滑板车的上柱。
图21a是如图20中的折叠后的滑板车的一部分的侧视特写视图,其中相邻的第一磁体和相应的互补磁体被示出为收缩的。
图21b是如图21a中的折叠后的滑板车的一部分的侧视图,其中折叠手柄被示出为抬起,其中折叠手柄被抬起以便解锁折叠后的滑板车。
图21c是如图21b所示的详细视图B,示出了折叠手柄的延伸的尾端压靠上柱的外表面,从而克服将相邻的第一磁体及其相应的互补磁体分开的磁力。
图22示意性地图示出了根据本公开的多个方案的另一种滑板车的非限制性示例实施例,其包括转向柱、板面组件、转向机构、后轮组件和可选的可拆卸袋,其中转向柱处于笔直、直立的位置。
图23示意性地图示出了图22所示的滑板车的非限制性示例,其中转向柱处于左转瞬时位置。
图24是图23所示的滑板车的后视立体示意图,其中转向柱向左枢转,从而也向左倾斜。
图25是图24所示的滑板车的前部分的俯视立体示意图。
图26a是图22所示的滑板车的前视图,其中仅出于可见性的目的,一些部件被移除以仅用于图示的目的。
图26b是图26a所示的滑板车的转向机构的前视示意图,其中主要示出了参与促进滑板车向左或右转弯的部件。
图27a是图22所示的滑板车的转向机构的前视图,其中仅出于可见性的目的,一些遮挡部件被移除以仅用于图示的目的,并且其中滑板车被示出为处于左转瞬时位置。
图27b是图27a所示滑板车的转向机构的前视示意图,其中示出了主要参与促进滑板车向左或向右转弯的部件。
图28a是图27a中所示的转向机构的后视立面立体图, 同时滑板车处于左转瞬时位置。
图28b是图28a所示的转向机构的前视立面立体图。
图28c是图28a所示的转向机构部件的一部分的后视竖直截面图。
图29a是图28a中所示的转向机构部件的倾斜同步单元的前视俯视立体图。
图29b是图29a中所示的倾斜同步单元的前视仰视立体图。
图29c是图29a中所示的倾斜同步单元的侧视图,面向顶部和底部拱形肋。
图29d图示出了图29a中所示的倾斜同步单元的前视竖直截面图。
图29e图示出了图29a中所示的倾斜同步单元的前视横向截面图。
图29f图示出了图29e中所示截面的俯视图。
图30a是图22所示的滑板车的倾斜同步单元的俯视立体图,其中当转向柱处于直立位置时,截头旋转锥布置在顶部和底部拱形肋之间。
图30b是图30a所示的倾斜同步单元的仰视立体图。
图30c是图22中所示的倾斜同步单元的俯视立体图,其中当转向柱处于左转瞬时位置时,截头旋转锥布置在靠近内平面的前端的顶部和底部拱形肋之间。
图30d是图30c所示的倾斜同步单元的仰视立体图。
图31a是根据本公开的枢转接口单元的前视立面立体示意图。
图31b是图31a中所示的枢转接口单元的前视立面立体示意图,其中截头旋转锥可旋转地安装在指定的固定轴上。
图32a是图31b所示的倾斜同步单元的前视略微立面示意图,其中转向柱处于直立位置,并且其中倾斜同步单元与截头旋转锥可操作地配对。
图32b是图31b中所示的倾斜同步单元的仰视前视立体示意图,其中转向柱处于左转瞬时,并且其中倾斜同步单元与截头旋转锥可操作地配对。
图33a是根据本公开实施例的折叠后的滑板车的前视立体示意图,滑板车处于折叠状态。
图33b是图33a所示的折叠后的滑板车的后视立体图,其中在其上安装有实用工具箱。
图33c是图33b所示折叠后的滑板车的侧视图。
图34a是根据本公开实施例的滑板车的下部的后视立面立体示意图,滑板车处于展开状态,其中转向柱处于直立位置。
图34b是根据本公开实施例的图34a中所示的滑板车的前下部的侧视示意图,其中滑板车处于直立、展开平衡的状态。
图34c是图34b中所示的细节C的截面图,图示出了板面组件的下部后锁定销组件的非限制性示例,其中下部锁定销组件被示出为处于锁定状态。
图34d是图34b中所示的细节C的截面图,图示出了板面组件的下部后锁定销组件的非限制性示例,其中下部锁定销组件被示出为处于解锁状态。
图34e是图34d中所示的前部上滑板车折叠接口组件的上部前锁定机构的非限制性示例的竖直截面图,其中上部前闩锁螺栓(为柱锁定销)被锁定到折叠的前接收腔中。
图35a是根据本公开的一些非限制性示例实施例的接口型材臂的侧视竖直截面示意图。
图35b是图35a中所示的接口型材臂的内部元件的侧视示意图,其中接口型材本身被移除以仅用于图示的目的。
图36a是滑板车折叠接口组件的后视立体图,其中滑板车处于展开位置,并且包括折叠电机。
图36b图示出了图36a中所示的滑板车折叠接口组件,其中折叠电机被移除以仅用于图示的目的。
图36c是根据本公开的多个方案的图36a中所示的滑板车折叠接口组件和滑板车的其他单元的互相连接性的后视仰视立体图。
图36d是下部后枢转接头的后截面DD’(见图36a)图,其中下部后枢转接头包括后轴保持铰链装置和后环形元件。
图36e是轴保持铰链装置的立体图。
图37a是根据本公开的一些非限制性示例实施例的另一个接口型材臂的侧视竖直截面示意图。
图37b是图37a中所示的接口型材臂的内部元件的侧视示意图,其中接口型材本身已被移除以仅用于图示的目的。
图37c是上部滑板车折叠接口组件的前部上锁定销机构的非限制性示例的竖直截面图,其中闩锁螺栓的上锁定端部被锁定到折叠接收腔中。
图38a是图34a所示的滑板车的侧视图。
图38b是图34a所示的滑板车的侧视图,其中滑板车处于初始折叠瞬时。
图38c是图34a所示的滑板车的侧视图,其中滑板车处于中间折叠瞬时。
图38d是图34a所示的滑板车的侧视图,其中滑板车处于另一个中间折叠瞬时。
图38e是图34a所示的滑板车的后视立体图,其中滑板车处于折叠状态。
图38f是图34a所示的滑板车的前视立体图,其中滑板车处于折叠状态。
图39a是根据本公开的一些非限制性示例实施例的后线轮和折叠电机的接口的前视侧视立体示意图。
图39b是如图39a所示的后线轮和折叠电机的接口的后视侧视局部截面立体示意图。
图39c是如图39a所示的包括折叠电机的下部后枢转接头的接口的后视立面立体示意图。
图40a以略微立面的立体图示出了示例后轮盖。
图40b是图40a所示的示例后轮盖的侧视图。
图40c是根据本公开实施例的滑板车的侧视图,其中滑板车示出为在折叠过程刚好完成之前的瞬时,并且其中后轮仍位于硬表面上。
图40d图示出了图40c所示的滑板车,其中滑板车刚刚达到完成折叠过程的结束,其中后轮在空中,高于地面,其中滑板车在后轮盖上向后倾斜,后轮盖现在用作支架。
图41a图示出了自动驾驶机构的非限制性示例实施例的元件,该自动驾驶机构包括布置在转向柱的上柱内部的自动电机。
图41b是图41a所示的自动驾驶机构的后视截面图。
图41c是图41a所示的自动驾驶机构的后视图,其中旋转传动杆和旋转接收杆可操作地接合。
图41d是图41c所示的自动驾驶机构的后视截面图。
图42a示意性地图示出了根据本公开的多个方案的另一种滑板车的非限制性示例实施例,其包括转向柱、板面组件、转向机构、后轮组件和可选的可拆卸袋,其中转向柱处于笔直、直立的位置。
图42b示意性地图示出了图42a中所示的滑板车的非限制性示例,其中转向柱处于左转瞬时位置,并且其中滑板车包括可选的手动折叠机构。
图43是图42b中所示的滑板车的后视立体示意图,其中转向柱向左枢转并因此也向左倾斜。
图44是图42b所示的滑板车的前部分的俯视立体示意图。
图45a是图42a中所示的滑板车的前视图,其中仅出于可见性的目的,一些部件被移除以仅用于图示的目的。
图45b是图42b所示滑板车的转向机构的前视示意图,其中主要示出了促进滑板车向左或向右转弯的部件。
图46a是图42b所示的滑板车的转向机构的前视图,其中仅出于可见性的目的,一些遮挡部件被移除以仅用于图示的目的,并且其中滑板车被示出为处于左转瞬时位置。
图46b是图46a所示的滑板车的转向机构的前视示意图,其中示出了参与促进滑板车向左或向右转弯的主要部件。
图47a是图46a中所示的转向机构的后视立面立体图, 同时滑板车处于左转瞬时位置。
图47b是图47a所示转向机构的前视立面立体图。
图47c是图28a所示转向机构部件的一部分的后视图,其中转向柱处于直立位置。
图48a是图47a中所示的转向机构部件的倾斜同步单元的前视俯视立体图。
图48b是图48a中所示的倾斜同步单元的前视仰视立体图。
图48c是图48a中所示的倾斜同步单元从转向柱观察的侧视图。
图48d图示出了图48a中所示的倾斜同步单元的后视竖直截面图。
图48e图示出了图48a中所示的倾斜同步单元的局部横向截面俯视图。
图49a图示出了具有倾斜的上平面和倾斜的下平面的可安装拱形肋,其中两个倾斜平面都以角度γ倾斜。
图49b图示出了可安装拱形肋的俯视图,其中完全示出了倾斜的上平面,并且其中可安装拱形肋被示出为假想圆柱环的一部分,该假想圆柱环具有宽度W3和可操作地与转向柱的枢转轴线重合的枢转轴线。
图50a是图42a中所示的滑板车的倾斜同步单元的俯视立体图,其中当转向柱处于直立位置时,可安装拱形肋布置在上部一对截头旋转锥之间。
图50b是图50a所示的倾斜同步单元和可安装拱形肋的组件的竖直截面图。
图50c是如图50a所示的倾斜同步单元和可安装拱形肋的组件的后视俯视立体图,其中可安装拱形肋被示出为枢转,从而促进根据滑板车的驾驶速度来偏置转向柱的倾斜。
图51a是根据本公开的枢转接口单元的前视立面立体示意图,其中枢转接口单元包括可安装拱形肋连杆组件。
图51b是图51a中所示的枢转接口单元的前视立面立体示意图,其中可安装拱形肋安装到枢转接口单元上。
图52a是图51b所示的倾斜同步单元的前视立体示意图,其中转向柱处于直立位置,并且其中倾斜同步单元与可安装拱形肋可操作地配对。
图52b是图52a中所示的倾斜同步单元的仰视前视立体示意图,然而,转向柱处于左转瞬时,其中可安装拱形肋与倾斜同步单元的截头旋转锥可操作地配对。
图53a是根据本公开的变体的倾斜同步单元的立面立体图,其具有上拱形肋和下拱形肋。
图53b是如图53a所示的倾斜同步单元和容纳的可安装拱形肋的组件的后视立体图,其中可安装拱形肋安装在上拱形肋和下拱形肋之间。
图53c是如图53b所示的倾斜同步单元与容纳的可安装拱形肋的组件的侧视图。
图54a是根据本公开实施例的滑板车下部的后视立面立体示意图,该滑板车处于展开状态,其中转向柱处于直立位置,并且滑板车包括手动折叠机构。
图54b是根据本公开实施例的图54a中所示的滑板车的前下部的侧视示意图,其中滑板车处于直立、展开的平衡状态。
图55a是根据本公开的一些非限制性示例实施例的接口型材臂的侧视竖直截面示意图,促进了手动折叠和电动折叠二者。
图55b是图55a中所示的接口型材臂的内部元件的侧视示意图,其中接口型材本身被移除以仅用于图示的目的。
图55c是如图55b所示的接口型材臂的元件的后视右视立面立体图。
图55d是如图55a所示的接口型材臂的右视截面图,其中下后连杆锁定机构和相似的上前连杆锁定机构都示出为处于解锁状态。
图55e是如图55a所示的接口型材臂的左侧视图,其中手动折叠启动手柄被用于电动折叠启动的电机代替。
图55f是如图55e所示的接口型材臂的右侧视图。
图56a图示出了根据本公开的变体的示例阻尼装置组件,其被构造为提供对一对弹簧机构的替代。
图56b是滑板车的转向机构的非限制性示例实施例的下部的前视立面立体示意图,其中转向机构包括如图56a所示的阻尼装置组件。
图56c是如图56b所示的滑板车的前视局部视图,示意性地图示出了转向机构的非限制性示例,包括作为相应转向机构的一部分的阻尼装置组件,其中仅出于可见性的目的,一些部件已被移除以仅用于图示的目的,其中滑板车被示出为直立展开状态。
图56d是如图56c所示的滑板车的前视局部视图,其中滑板车处于展开的左转瞬时位置。
具体实施方式
现在将在下文中参照附图更全面地描述本公开,其中示出了本公开的优选实施例。然而,本公开可以以许多不同的形式来实施,并且不应被解释为限于在此阐述的实施例;相反,提供这些实施例是为了使本公开更加透彻和完整,并将本公开的范围充分地传达给本领域的普通技术人员。
实施例是本公开的示例或实施方式。“一个实施例”、“实施例”或“一些实施例”的各种出现不一定都指代相同的实施例。尽管可以在单个实施例的上下文中描述本公开的各个方案,但是也可以单独地或以任意合适的组合提供这些方案。相反地,虽然为了清楚起见,本文可以在单独的实施例的上下文中描述本公开,但是本公开也可以在单个实施例中实施。
说明书中对“一个实施例”、“实施例”、“一些实施例”或“其他实施例”的引用意味着结合这些实施例描述的特定特征、结构、特性或其他方面包括在至少一个实施例中,但不一定是本公开的所有实施例。应当理解,本文所用的措辞和术语不应被解释为限制性的并且仅用于描述性目的。
对本公开中描述的实施方式的各种修改对于本领域的普通技术人员来说是显而易见的,并且在不脱离本公开的精神或范围的情况下,本文定义的一般原理可以应用于其他实施方式。因此,权利要求不旨在限于本文所示的实施方式,而是要符合与本公开一致的最宽范围、本文公开的原理和新颖特征。
某些特征可能在上面被描述为以某些组合起作用,甚至最初也是这样声称地,来自所要求组合的一个以上的特征可以在一些情况从组合中删除,所要求保护的组合可能指向子组合或子组合的变体。
除非上下文另有明确要求,否则在整个说明书和权利要求书中,词语“包括”、“包含”等应以包容性的意义解释,而不是排他性或穷尽性的意义;也就是说,从“包括但不限于”的意义上来说。本文通常使用的词语“联接”是指可以直接连接或通过一个以上的中间元件连接的两个以上的元件。同样,本文通常使用的词语“连接”是指可以直接连接或通过一个以上的中间元件连接地两个以上的元件。此外,当在本申请中使用时,词语“本文”、“以上”、“以下”和类似含义的词语应指代作为整体的这个申请,而不是指本申请的任意特定部分。在上下文允许的情况下, 以上具体实施方式中使用单数或复数的词语也可以分别包括复数或单数。参照两个或两个以上的项目的列表的词语“或”涵盖了对该词语的所有以下解释:列表中的任意项目、列表中的所有项目以及列表中项目的任意组合。
此外, 除非另有明确说明,或在所使用的上下文中以其他方式理解,否则本文使用的条件性语言,例如“可以”、“可能”、“能够”、“例如”、“如”等,通常旨在表达某些实施例包括(而其他实施例不包括)某些特征、元件和/或状态。因此,这种条件性语言通常并不旨在暗示一个以上的实施例无论如何都需要的特征、元素和/或状态,或者一个以上的实施例必然包括用于在有或没有作者输入或提示的情况下,决定这些特征、元件和/或状态是否包括在任意特定实施例中或将在任意特定实施例中执行的逻辑。
本文提供的教导可以应用于其他系统,而不仅仅是本文描述的系统。可以组合上述各种实施例的元件和动作以提供进一步的实施例。
根据本公开的一个方案,提供了一种具有两个前轮的滑板车,前轮由转向柱控制,该转向柱是转向机构的一部分, 当转向柱旋转时,转向机构同步转向柱的倾斜以向转弯曲线的内周缘向一侧倾斜。此外,滑板车的站立板被构造为向转弯曲线的内周缘向一侧倾斜。此外,转向机构被设计成保持两个前轮直立,包括在转弯时。
根据本公开的另一方案,提供了一种可折叠滑板车,其可以折叠成手推车,包括板面组件。可折叠滑板车还可以包括可拆卸袋,其中滑板车可以折叠成手推车载重架,包括板面组件和可拆卸袋。
现在参照附图。根据本公开的各个方案, 图1示意性地图示出了滑板车100的第一非限制性示例实施例,包括转向柱110、具有站立板121和后轮组件170的板面组件120、转向机构130和可选的可拆卸袋199,其中转向柱110处于笔直、直立的位置。站立板121被构造为朝向转弯曲线的内周缘向一侧倾斜,并且被构造为支撑通常站在其上的骑乘者。
转向柱110可包括具有两个把手116的车把118, 以帮助滑板车100的骑乘者通过相应地枢转转向柱110向左或向右转弯。本公开的主要方案旨在提供一种机构, 当转向柱110枢转时,转向柱110也被迫朝向转弯曲线的内周缘向一侧倾斜。通常,转向柱110的枢转轴线115可操作地位于滑板车100的纵向轴线105上。
因此,转向机构130促进骑乘者在转动转向柱110时按照他/她的意愿将滑板车100向左或向右转动。图2示意性地图示出了根据本公开的多个方案的滑板车100的如下状态,其中转向柱110沿着方向117向左枢转并从而也向左倾斜。图3是根据本公开的多个方案的滑板车100的后视立体示意图,其中转向柱110向右枢转并从而也向右倾斜。倾斜测量以恒定的预构造速率来规定倾斜测量。在一个实施例中,转向柱110被细分为上柱112和下柱114,其中上柱112在下柱114上可伸缩地滑动。
转向机构130还包括通过转向机构互相连接至转向柱110的一对前轮132,其中当转向柱110枢转时,前轮(132
后轮组件170包括可旋转地连接至后轴的后轮172。后轮组件170还可以包括制动机构174。后轮组件170可以由电机操作,例如电动机(未示出)。
图5a是滑板车100的前视图,示意性地图示出了转向机构130的非限制性示例,其中仅出于可见性目的,(与转向柱110相关的)一些部件已被移除以仅用于图示目的,并且其中滑板车100示出为处于展开位置。类似地,图6a是滑板车100的前视图,示意性地图示出了转向机构130,其中仅出于可见性目的,一些遮挡部分已被移除以仅用于图示的目的,并且其中滑板车100被示出为处于左转瞬时位置。
图5b是被示出为处于展开位置的滑板车100的转向机构130的前视示意图。图5b图示出了参与促进滑板车100左转或右转的部件。类似地, 图6b是被示出为处于左转瞬时位置的滑板车100的转向机构130的前视示意图。图6b图示出了参与促进滑板车100转弯(在图6b所示的非限制性示例中为左转)的部件。转向机构130的利用转向柱110的自动倾斜来参与促进滑板车100转向的部件包括转向柱110、一对前轮132、倾斜同步单元140和一对平衡致动器148(仅作为示例,其示出为一对弹簧)。平衡致动器148也可以被实施为例如一对气动或液压机构。
转向机构130进一步包括两个框架元件:枢转框架元件188和非枢转框架元件180。枢转框架元件188被构造为接收来自倾斜同步单元140的枢转运动,其中枢转框架元件188在轴承185处枢转地连接至非枢转框架元件180,该轴承185布置在非枢转框架元件180的横向中心位置处。平衡致动器148的下端149(149
还应理解的是, 附接至枢转框架元件188的站立板121被构造为与枢转框架元件188一起朝向转弯曲线的内周缘向一侧倾斜(例如,参见图6a)。
为了进一步阐明转向机构130以及枢转框架元件188和非枢转框架元件180之间的相互关系,分别参照图7a和图7b引入转向倾斜组件131a和131b。虽然图7a还示出了枢转框架元件188,但在图7b中仅处于图示的目的,枢转框架元件188已被移除,以显露出倾斜同步单元140和一对截头旋转锥142,当枢转转向柱110时,它们一起促进转向柱110的自动倾斜。图7c示出了倾斜同步组件155的详细A视图,倾斜同步组件155包括倾斜同步单元140和非枢转框架元件180,它们通过轴185可枢转地互相连接。图8a是示例转向机构130的倾斜同步单元140的前视示意图,滑板车100处于展开位置。倾斜同步单元140包括具有与转向柱110的枢转轴线115重合的旋转轴线的柱接口部分141、枢转接收连杆部件146和同步主体143。图8b是转向机构130的示例性倾斜同步单元140的侧视立面图,滑板车100示出为处于展开位置,处于笔直、直立的位置。图8c是转向机构130的倾斜同步单元140的俯视立体示意图,滑板车100示出为处于展开位置。
同步主体143包括两个拱形壁145,其中拱形壁145被示出为假想圆柱形厚壁139的一部分,该圆柱形厚壁具有厚度W1和与转向柱110的枢转轴线115可操作地重合的轴线。拱形壁145在其底部相对于垂直于枢转轴线115的假想平面以角度α(参见图8b)被对角截断,形成平面144,包括右面144
图9a是转向机构130的倾斜同步单元140的前视示意图,滑板车100处于展开位置,其中倾斜同步单元140分别与一对截头旋转锥142可操作地配对。图9b是滑板车100的倾斜同步单元140的侧视立面示意图,滑板车100处于展开位置。截头旋转锥142相对于其中心轴线113具有斜度β,使得当截头旋转锥142的倾斜周缘抵靠相应的倾斜平面144可操作地放置时,轴线113基本垂直于枢转轴线115。
图10a是转向机构130的倾斜同步单元140的前视立体示意图, 以示例的方式示出了滑板车100处于左转瞬时位置,如参照图8a所述的,倾斜同步单元140包括具有与转向柱110的枢转轴线115重合的旋转轴线的柱接口部分141、枢转接收连杆部件146和同步主体143。图10b是转向机构130的倾斜同步单元140的后视立体图, 以示例的方式示出了滑板车100处于左转瞬时位置。
同步主体143包括例如两个拱形壁145,其中拱形壁145是假想的圆柱形厚壁139的一部分,该圆柱形厚壁具有厚度W1和与转向柱110的枢转轴线115可操作地重合的轴线。拱形壁145在其底部相对于垂直于枢转轴线115的假想平面以角度α(参见图8b)被对角截断,形成平面144,包括右面144
图11a是转向机构130的倾斜单元140的前视立体示意图, 以示例的方式示出了滑板车100处于左转瞬时位置,其中倾斜同步单元140分别与一对截头旋转锥142可操作地配对。图11b是滑板车100的倾斜同步单元140的后视立体示意图, 以示例的方式示出了滑板车100处于左转瞬时位置。截头旋转锥142相对于其中心轴线113具有斜度β,使得当截头旋转锥142的倾斜周缘抵靠相应的倾斜平面144可操作地放置时,截头旋转锥142的轴线113基本上垂直于枢转轴线115。
应当理解, 当滑板车100处于展开位置时,滑板车100处于空闲状态,包括平衡致动器148。具有初始张力F
还应理解, 当滑板车100处于转弯位置时,枢转的前轮(132
为了使滑板车100从空闲状态进入如图11a和图11b中的示例所示的左转瞬时位置期望方向(左转是驾驶员的任意期望方向的非限制性示例),滑板车100的驾驶员通常通过使用一个或两个把手116,将转向柱110围绕枢转轴线115向左枢转,同时施加枢转力F
a. 转向柱110克服平衡致动器148的阻力F
b. 牢固地附接至转向柱110的倾斜同步单元140与转向柱110一起枢转。
c. 随着倾斜同步单元140枢转,倾斜平面144也枢转,将摩擦力F
d. 安装在固定到非枢转框架元件180上的相应固定轴138(见图7b和图7c, 138
(142
还应当理解, 由于两个倾斜表面之间存在的摩擦力F
e. 由于倾斜平面144的角度α (参见图8b),当相应的平面144(在该示例中为右面144
只要驾驶员保持枢转转向柱110,枢转转向柱110也倾斜至所选择的转弯侧。
随着转向柱110继续倾斜,一个平衡致动器148(在该示例中为右平衡致动器148
应当理解,平衡致动器148是不平衡的,倾向于平衡它们的张力, 即返回它们初始张力F
优选地,滑板车100包括便于将滑板车100折叠到折叠状态的折叠机构,使得后轮172停靠在前轮132之间或附近,其中后轮172位于高于前轮132的位置,并且其中可以携带滑板车100就好像它是随身行李或手推车载重架一样。图12a是根据本公开实施例的折叠后的滑板车100的前视立体示意图。折叠后的滑板车100示出为处于直立位置,这是滑板车100的空闲状态。图12b是折叠后的滑板车100的后视立体图,其中在使用折叠手柄200解锁了板面组件120和一对接口型材臂210之后促进了折叠过程。应当理解,折叠后的部件也可以在折叠状态下被锁定。图13a是根据本公开实施例的折叠状态下的折叠后的滑板车100的前视立体示意图,其中滑板车100还可以包括实用工具箱199,其被构造为附接至转向柱110,包括在折叠状态下。图13b是如图13a所示的折叠后的滑板车100的侧视图。
图14a是根据本公开实施例的滑板车100的前面下部的侧视示意图,其中滑板车100处于初始折叠阶段,并且其中沿着方向205向上拉动折叠手柄200启动折叠过程。在所示的初始折叠阶段实例中,板面组件120的前端(在没有限制的情况下,其大致平行于路面)被示出为相对于枢转连接的接口型材臂210枢转上升。图14b是根据本公开实施例的滑板车100的下部的后视立面立体示意图,其中折叠手柄200已被抬起以启动折叠过程。在折叠过程中,接口型材臂210向上折叠,绕轴线215枢转, 同时板面组件120的前端相对于枢转连接的接口型材臂210向上升起,绕轴线125枢转。在折叠的同时,后轮172保持在地面上,但当折叠完成时,后轮172位于空中,便于如手推车载重架一样舒适地使用前轮132来携带滑板车。
图15a是根据本公开实施例的滑板车100的下部的后视立面立体示意图,其中所示的视图是有助于滑板车100的折叠过程的锁定/解锁机构的特写视图。滑板车100的主要折叠部件是以枢转方式互相连接的板面组件120和接口型材臂210。
图15b图示出了如图15a所示的滑板车100的下部,其中接口型材臂210被移除以仅用于图示的目的。根据本公开的一些实施例,移除接口型材臂210显露出了牵引线缆系统和四个锁定销组件240:右前锁定销(柱锁定销)组件240
当向上拉起折叠手柄200时,折叠部件也可锁定在折叠状态。如参照图14a和图14b所描述的,沿着方向205向上拉起折叠手柄200启动折叠过程。当沿着方向205拉动折叠手柄200时,在滑板车100的每一侧沿着方向255拉动牵引线缆252,因为牵引线缆252牢固地附接至折叠手柄200。通常,牵引线缆252和互相连接至每根牵引线缆252的其他牵引线缆分段在保护套管(250s,见图16b)内操作。图15c图示出了如图15a所示的滑板车100的下部,其中仅为了图示的目的而移除了站立板121。
以右牵引线缆252
图16a是侧截面图,示意性地图示出了根据本公开实施例的滑板车100的前部,其中接合型材臂210被移除以仅用于图示的目的。移除接口型材臂210显露出了右前线缆段250
图16b是侧截面图,示意性地图示出了锁定销组件240,其中一些部件被移除以仅用于图示的目的。锁定销单元242也在图16c中示出,其中锁定销单元242包括主细长主体244、锁定端部246和被拉动端部245。锁定端部246被示出为位于外部固定腔236内,被锁定在其中。被拉动端部245被构造为牢固地接收相应线缆段250的末端。线缆段250被示出为被保护套管250s覆盖。在图16c所示的非限制性示例中,线缆段250的末端插入形成在被拉动端部245末端的中心位置的孔241,并且紧固螺钉(未示出)经由相应的螺纹243将线缆段250的末端紧固到锁定销单元242。返回参照图16a、图16b、图16d和图16e,锁定销组件240还包括锁定销外壳248,其被构造为接收锁定销组件240的相应被拉动端部245。如图16a所示,相应的线缆段250穿过形成在锁定销外壳248的末端的中心位置处的孔口并且连续地固定到相应的锁定销单元242的被拉动端部245。锁定销外壳248还可包含偏置元件,例如弹簧249或任意其他类型的偏置元件。
当折叠手柄200沿着方向205被拉动时,牵引线缆252被向后拉向折叠手柄200。当牵引线缆252被拉动时,线缆段250被拉动使得相应锁定销单元242的相应被拉动端部245被拉动, 以使得被拉动端部245被拉入相应锁定销外壳248中并抵抗相应的偏置元件249。在图16d中,锁定销单元242示出为处于锁定状态,而在图16e中,锁定销单元242示出为处于解锁状态,而锁定销单元242的锁定端部246是可见的。
现在参照图17a-图17c。如图1、图2、图13a和图13b以及图17a所示,根据本公开实施例,滑板车100还可以包括实用工具箱199,该实用工具箱被构造为将物品储存在指定的储存隔间中。图17b是示例性实用工具箱199的后视立体图,该实用工具箱被构造为一体地附接至滑板车100上。在一个实施例中,例如,实用工具箱199的内部储存空间可以被细分为2个以上的内部储存隔间192。通常,实用工具箱199被设计成包围转向柱110的上柱112,上柱112是伸缩式转向柱110的较宽的部件。在一个实施例中,参照图17b和图17c所示,铰链194(第一上铰链194
现在参照图18-图21c, 图示出了在折叠状态下锁定/解锁滑板车100的一个实施例。在该实施例中,折叠手柄200还被用于在锁定、折叠状态下解锁滑板车100。
图18是示意性地图示出根据本公开的一些实施例的滑板车100的后部的侧视仰视立体图,滑板车100还包括右板型材122
图20示意性地图示出了折叠后的滑板车100的中心部分的后视立体图,其中折叠手柄201具有延伸的尾端204,该尾端204延伸靠近上柱112。当滑板车100处于折叠状态时,一个以上的第一磁体320和相应的一个以上的互补磁体310被预先构造为彼此相邻定位,从而折叠后的滑板车100被所形成的相互作用的磁力保持在折叠状态。图21a是折叠后的滑板车100的一部分的侧视特写视图,其中示出了相邻的第一磁体320和相应的互补磁体310。图21b是折叠后的滑板车100的一部分的侧视图,其中折叠手柄201示出为被抬起,其中折叠手柄201被抬起以便解锁折叠后的滑板车100。图21c为如图21b所示的详细视图B,示出了折叠手柄201的延伸尾端204压靠上柱112的外表面,从而克服磁力拉开相邻的第一磁体320及其各自的互补磁体310,进入解锁折叠状态。 图21a是如图20中的折叠后的滑板车100的一部分的侧视特写视图,其中相邻的第一磁体320和相应的互补磁体310被分开示出。
图22示意性地图示出了根据本公开的一些方案的滑板车500的第二非限制性示例实施例,滑板车500包括转向柱510、具有站立板521和后轮组件570的板面组件520、转向机构530和可选的可拆卸袋599,其中转向柱510处于笔直、直立的位置。站立板521被构造为朝向转弯曲线的内周缘向一侧倾斜, 并且被构造为用于支撑通常站在其上的骑乘者。
转向柱510可包括具有两个把手516的车把518,帮助滑板车500的骑乘者通过相应地枢转转向柱510向左或向右转向。本公开的主要方案是提供一种机构, 当转向柱510被枢转时,转向柱510也被迫朝向转弯曲线的内周缘向一侧倾斜。通常,转向柱510的枢转轴线515可操作地位于滑板车500的纵向轴线505上。
因此,该转向机构530便于骑乘者按照其意愿转动转向柱510, 以向左或向右转动滑板车500。图23示意性地图示出了根据本公开的多个方案的滑板车500处于转向柱510沿着方向517向左枢转并因此也向左倾斜的状态。图24是根据本公开的多个方案的滑板车500的后视立体示意图,其中,转向柱510向左枢转并因此也向左倾斜。倾斜测量以恒定的预构造速率指示倾斜测量。在一个实施例中,转向柱510被细分成上柱512和下柱514,其中上柱512在下柱514上可伸缩地滑动。
转向机构530还包括通过转向机构互相连接至转向柱510的一对前轮532,其中当转向柱510枢转时,前轮(532
后轮组件570(参见例如图22、图23和图25)包括可旋转地连接至后轴的后轮572。后轮组件570还可包括后轮盖574。后轮组件570可由后轮电机操作,在没有限制的情况下,后轮电机例如为通过例如电池999(参见例如图26b、图36c)提供动力的电动机(未示出)。后轮盖574也可以作为制动机构或其一部分。应当理解,车轮电机可以被构造为向前或向后,或者向前和向后两者驱动滑板车设备。
图26a是滑板车500的前局部视图,示意性地图示出了转向机构530的非限制性示例,其中仅出于可见性的目的,(与转向柱510相关的)一些部件已被移除以仅用于图示的目的,并且其中滑板车500被示出为处于展开位置(状态)。类似地,图27a是滑板车500的前视图,示意性地图示出了转向机构530,其中仅出于可见性的目的,一些遮挡部分已被移除以仅用于图示的目的,并且其中滑板车500被示出为处于左转瞬时位置。
图26b是被示出为处于展开位置的滑板车500的转向机构530的前视示意图。图26b图示出了参与促进滑板车500左转或右转的部件。类似地, 图27b是被示出为处于左转瞬时位置的滑板车500的转向机构530的前视示意图。图27b图示出了参与促进滑板车500转弯(在图27b所示的非限制性示例中为左转)的部件。
利用转向柱510的自动倾斜参与促进滑板车500转弯的转向机构530部件包括转向柱510、一对前轮532、倾斜同步单元540和一对平衡致动器592(592
应当理解, 当骑乘者枢转转向柱510时,牢固地附接至转向柱510的枢转接口单元560与转向柱510一起枢转,而在轴承585处枢转地连接至非枢转框架的元件580的倾斜输送单元590与转向柱510的枢转运动同步地向一侧倾斜。
这对相似的平衡致动器592(592
应当理解,上端部止动件591
力输送环594牢固且可操作地连接至倾斜输送单元590。因此,力输送环594致动非枢转框架元件580和相应的平衡致动器592(592
还应当理解, 同样附接至倾斜输送单元590的站立板521被构造为连同倾斜输送单元590一起朝向转弯曲线的内周缘向一侧倾斜(例如,参见图27a和图27b以及例如在下面的图28a中所示的滑板车折叠接口组件600)。
提供图28a和图28b以进一步阐明转向机构530以及枢转接口单元560、倾斜同步单元540、倾斜输送单元590和非枢转框架元件580之间的相互关系。图28a是滑板车500处于左转瞬时位置的同时,转向机构530部件的后视立面立体图,并且图28b是其前视立面立体图。在枢转转向柱510时(在所示的非限制性示例中,向左),倾斜同步单元540和截头旋转锥542一起促进了转向柱510的自动倾斜。
非枢转框架元件580包括倾斜同步单元保持环582,其被构造为将倾斜同步单元540固定到非枢转框架元件580。另一方面,枢转接口单元560固定到转向柱510上,从而当转向柱510被骑乘者或其他方式枢转时,枢转接口单元560与转向柱510一起枢转。图28c是转向机构530部件的一部分的后部竖直截面图,其中转向柱510处于直立位置。
还参照了图29a和图29b, 图29a图示出了倾斜同步单元540的前俯视立体图,并且图29b图示出了倾斜同步单元540的前仰视立体图。倾斜同步单元540包括两个平行的拱形深肋:顶部拱形肋544和底部拱形肋546。还参照图29c,其图示出了倾斜同步单元540的侧视图,面向顶部拱形肋544和底部拱形肋546。各个拱形肋(544和546)具有横向向内成斜面的相应的内部平面(543和547),其中内部拱形间隙D
应当理解,当转向柱510处于直立位置时,一对拱形肋(544和546)相对于地平线具有初始倾斜角。
还参照图29d,其图示出了倾斜同步单元540的前视竖直截面图,其中截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间。截头旋转锥542的倾斜周缘548和内平面(543和547)的周缘操作性地具有相同的角度γ,使得截头旋转锥542可以在形成于内平面(543和547)之间的内部空间中,从相应拱形肋(544和546)的一个内平面(543或547)的一端, 自由且适配地滚动到相应拱形肋(544和546)的内平面(543或547)的另一端。
还参照图29e,其图示出了倾斜同步单元540的前视横向截面图。图29f图示出了图29e中所示截面的俯视图,其中拱形肋546的拱形内平面547被完整地示出,并且其中拱形肋546(也暗示拱形肋544)被示出为假想的圆柱形环539的一部分,该圆柱形环539具有深度W2和横向轴线,该横向轴线在操作上与转向柱510的枢转轴线515重合。
应当理解, 当转向柱510处于直立位置时,截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间,在(或靠近)内平面(543和547)的中心位置。图30a图示出了倾斜同步单元540的顶部立体图,其中截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间,在(或靠近)内平面(543和547)的中心。图30b图示出了图30a中所示的倾斜同步单元540的仰视立体图。还参照了图30c,图30c图示出了倾斜同步单元540的顶部立体图,其中截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间,靠近内平面(543和547)的前端,展示出左转瞬时位置。图30d图示出了图30c中所示的倾斜同步单元540的仰视立体图。
还参照了图31a, 图31a是根据本公开的枢转接口单元560的前视立面立体示意图。枢转接口单元560包括具有与转向柱510的枢转轴线515重合的旋转轴线的柱接口部分564、枢转接收连杆臂566、枢转接收连杆部件567、旋转锥连杆臂562和旋转锥连杆组件561。旋转锥连杆组件561包括固定轴531,其中截头旋转锥542可旋转地安装在固定轴531上,如图31b所示。枢转接收连杆臂566牢固地附接至枢转接口单元560,如图28b所示。
图32a是转向机构530的倾斜同步单元540的前视略微立面立体示意图,滑板车500处于展开位置,其中转向柱510处于直立位置,并且其中倾斜同步单元540可操作与截头旋转锥542配对,截头旋转锥542可旋转地安装在旋转锥连杆组件561、旋转锥连杆臂562、枢转接口单元560的固定轴531上。应当理解,由于转向柱510处于直立位置,因此在(或靠近)内平面(543和547)的中心处,截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间。
图32b是倾斜同步组件555的前视立体示意图的前仰视立体示意图,组件555包括转向机构530的倾斜同步单元540,滑板车500处于展开位置,其中,作为示例,滑板车500被示出为处于左转瞬时位置。倾斜同步单元540与截头旋转锥542可操作地配对,截头旋转锥542可旋转地安装在旋转锥连杆组件561、旋转锥连杆臂562、枢转接口单元560的固定轴531上。应当理解,由于转向柱510在示例中已向左枢转,因此靠近内平面(543和547)的前端,截头旋转锥542布置在顶部拱形肋544和底部拱形肋546之间,展示出左转瞬时位置。当骑乘者将转向柱510向左枢转时,布置在顶部拱形肋544和底部拱形肋546之间的截头旋转锥542在拱形肋544和546之间朝向内平面(543和547)的前端与枢转角成比例地滚动。
应当理解,当(在该示例实施例中)进行右转时,通过向右枢转转向柱510,截头旋转锥542在拱形肋544和546之间朝向内平面(543和547)的后端滚动。
转向机构530的倾斜同步单元540还可以包括转向柱510的倾斜偏置机构,除了枢转转向柱510的程度以外,该倾斜偏置机构还以滑板车500的驱动速度为根据。速度偏置电机549经由中心轴541可枢转地附接至倾斜同步单元540,中心轴541的旋转轴线545(例如参见图29d和图29e)与速度偏置电机549的旋转轴线重合。
通常,在没有限制的情况下,倾斜度被预设为针对某个平均骑乘速度预先设计的平衡(无偏置)状态。如果当前速度高于那个平均骑乘速度,则可以启动速度偏置电机549以枢转倾斜同步单元540,从而增加拱形肋(544和546)的倾斜角度和转向柱510的倾斜角度;并且如果当前速度低于那个平均骑乘速度,则可以启动速度偏置电机549以枢转倾斜同步单元540,从而减小拱形肋(544和546)的倾斜角度和转向柱510的倾斜角度。
应当理解,当滑板车500处于展开位置时,滑板车500处于空闲状态,包括平衡致动器592。具有初始张力F
还应理解,当滑板车500处于转弯位置时,枢转的前轮(532
为了使滑板车500从空闲状态进入左转瞬时位置期望方向,如图22和图23中的示例所示,(左转是驾驶员的任意期望方向的非限制性示例),在通常通过使用一个或两个手柄516来施加枢转力F
a. 转向柱510克服平衡致动器592的阻力Fs围绕枢转轴线515向左枢转。
b. 牢固地附接至转向柱510倾斜同步单元540与转向柱510一起枢转。
c. 当倾斜同步单元540枢转时,拱形肋(分别为544和546)的内平面(543和547)也枢转,将摩擦力F
d.安装在固定轴531上的截头旋转锥542(参见图31a和图31b)可绕固定轴531自由旋转,同时内平面(543和547)在自由旋转的截头旋转锥542的倾斜周缘上滚动,其中固定轴531固定在枢转接口单元560的旋转锥连杆臂562上。
应当理解,倾斜同步单元540、截头旋转锥542和枢转接口单元560的集合可以被称为倾斜同步组件555(参见图26b、图27b、图28b、图32a和图32b)。
还应理解,由于两个倾斜表面之间存在的摩擦力F
校准,该校准机构使自由旋转的截头旋转锥542的倾斜周缘沿旋转轴线565移动,同时倾斜的内平面(543和547)保持静止。
e. 牢固地附接至转向柱510的枢转接口单元560与转向柱510一起围绕转向柱510的枢转轴线515枢转。枢转接口单元560还牢固地附接至倾斜输送单元590,倾斜输送单元590在轴承585处枢转地连接至非枢转框架元件580。因此,当枢转接口单元560围绕转向柱510的枢转轴线515枢转时,枢转接口单元560的枢转运动也被倾斜输送单元590转换成倾斜输送单元590的倾斜运动,以及枢转接口单元560和转向柱510的(关于轴承585的)倾斜运动。
因此,转向柱510与转向柱510的枢转运动同步地向一侧倾斜,并且只要驾驶员保持枢转转向柱510,枢转转向柱510也倾斜至选定的枢转运动侧。随着转向柱510继续倾斜,一个平衡致动器592(在该示例中为右平衡致动器592
应当理解,在转向柱510倾斜过程中不平衡的平衡致动器592试图平衡它们的张力,并返回到它们初始张力为F
优选地,滑板车500包括便于将滑板车500折叠到折叠状态的折叠机构,使得后轮572停靠在前轮532之间或附近,其中后轮572位于高于前轮532的位置,并且其中可以携带滑板车500就好像它是随身行李或手推车载重架一样。
图33a是根据本公开实施例的折叠后的滑板车500的前视立体示意图,滑板车处于折叠状态。折叠后的滑板车500被示出为处于直立位置,这是滑板车500的空闲状态。图33b是折叠后的滑板车500的后视立体图,其中在滑板车折叠接口组件600的接口型材臂610(例如,在下文的图34a中示出)的锁定机构被解锁之后,折叠过程得到促进。应当理解,折叠部件也可以在折叠状态下被锁定。应当理解,根据本公开实施例,滑板车500还可以包括实用工具箱599,其被构造为附接至转向柱510,包括在折叠状态下。图33c是图33b所示的折叠后的滑板车500的侧视图。应当理解,折叠后的部件也可以在折叠状态下被锁定。
图34a是根据本公开实施例的滑板车500的下部的后视立面立体示意图。在滑板车折叠接口组件600已被激活的折叠过程中,接口型材臂610向上折叠,围绕轴线615枢转,同时板面组件520的前端相对于枢转连接的接口型材臂610向上升起,围绕轴线625(例如,在下面的图34c中示出)枢转。在折叠时,后轮572保持在地面上,但当折叠完成时,后轮572位于空中,促进舒适地使用前轮532来停放滑板车或将滑板车作为手推车载重架携带。接口型材臂610的后下端枢转地连接至下后枢转接头(参见下文,例如图34c、图34d、图35a、图35b和图36a,为620
图34b是根据本公开实施例的滑板车500的前下部的侧视示意图,其中滑板车500处于直立、展开的平衡状态。在所示状态下,板面组件520(在没有限制的情况下,通常平行于路面)的前端通过接口型材臂610与前倾斜输送单元590(也参见图28a)互相连接,促进了板面组件520的倾斜,同时滑板车500处于展开位置。
图34c是细节C的截面图,图示出了板面组件520的下部后锁定销组件630
当滑板车500处于展开位置时,下接收螺纹腔621
图35a是根据本公开的一些非限制性示例实施例的接口型材臂610的侧视竖直截面示意图。接口型材臂610包括下锁定机构630
图35b是根据本公开的一些非限制性示例实施例的接口型材臂610的内部元件的侧视示意图,其中接口型材610被移除以仅用于图示的目的。如图35b所示,两个分部电机635
图35a进一步图示出了下部电机635
例如,图22图示出了处于展开位置的滑板车500,其中通常,在展开位置,后下锁定机构630
在没有限制的情况下,滑板车500的折叠优选可以是全自动的。还参照图36a,其图示出了滑板车折叠接口组件600,其中滑板车500处于展开位置,包括折叠电机640。图36b图示出了图36a中所示的滑板车折叠接口组件600,其中折叠电机640被移除以用于图示的目的。
滑板车500从展开位置(参见图22)到折叠状态(参见图33c)和从折叠状态到展开位置的转换,通常包括两个基本运动:1)滑板车折叠接口组件600朝向转向柱510并返回的运动;2)板面组件520朝向滑板车折叠接口组件600并返回的运动。这两个元件同时执行的路径不相同也不相等:板面组件520执行的朝向滑板车折叠接口组件600并返回的运动比滑板车折叠接口组件600执行的运动更长。将滑板车500从展开位置转换到折叠状态以及从折叠状态转换到展开位置的方法,被配置为使这两个元件的运动同步。
本公开所描述的关于滑板车500的折叠和展开机构,还包括上前枢转接头620
图36c是根据本发明的方案的滑板车折叠接口组件600和滑板车500的其他单元的互相连接性的后视仰视立体图。图36d是下后枢转接头620
由于在折叠或展开时,滑板车折叠接口组件600朝向转向柱510同时执行的运动路径, 以及板面组件520朝向滑板车折叠接口组件600执行的运动路径不是相等直径的,后线轮654的直径比前线轮652的直径小一定比例,该比例使滑板车折叠接口组件600和板面组件520的运动路径达到预先构造的同时静止状态。
张紧线缆650在枢转后线轮654和固定前线轮652之间拉伸,建立张力τ,其中张紧线缆650分别锚固在两个线轮上,使得张紧线缆650不是分别在任一个线轮(652、654)上滑动,而是缠绕在其上。当折叠或展开滑板车500时,两个移动元件(滑板车折叠接口组件600朝向转向柱510或远离转向柱)将同时开始和完成它们各自的运动, 因为非弹性张紧线缆650保持拉伸。
根据本公开的变型,可以使用本领域已知的各种锁定/解锁机构来实施内锁定机构。接口型材臂610的另一种锁定/解锁机构。现在参照图37a-图37c。图37a是根据本公开的一些非限制性示例实施例的接口型材臂611的侧视竖直截面示意图。接口型材臂611包括转向柱510的下后锁定销机构670
图37b是根据本公开的一些非限制性示例实施例的接口型材臂611的内部元件的侧视示意图,其中接口型材611被移除以仅用于图示的目的。如图37b所示,下部电机675
图37c是上部滑板车折叠接口组件600的前上锁定销机构670
图37a-图37b进一步图示出了相应的示例弹簧(679
图38a是处于展开位置的滑板车500的侧视图示; 图38b是处于初始折叠瞬时中的滑板车500的侧视图示;图38c是处于中间折叠状态的滑板车500的侧视图示; 图38d是处于中间折叠瞬时的滑板车500的侧视图示; 图38e是处于折叠状态的滑板车500的后视立体图示;并且图38f是处于折叠状态的滑板车500的前视立体图示。
在没有限制的情况下,滑板车500的折叠可以是全自动的。还参照图36a,其示出了滑板车折叠接口组件600,其中滑板车500处于展开位置,包括折叠电机640。图36b图示出了图36a中所示的滑板车折叠接口组件600,其中折叠电机640已被移除以仅用于图示的目的。
应当理解,虽然折叠电机640被示出为附接至板面组件520,但是折叠电机640可以固定到沿着张紧线缆650的其他位置。
还应当理解,滑板车的折叠也可以是完全手动或部分手动的,如下文将进一步描述的。
图39a是根据本公开的一些非限制性示例实施例的后线轮654和折叠电机640的接口的前侧视立体示意图,其中折叠电机640被构造为经由后轮轴645驱动枢转线轮654,从而将张紧线缆650的一部分缠绕在后线轮654上或从后线轮654上松开。图39b是后线轮654和折叠电机640的接口的后侧视局部截面立体示意图,其中各种元件被移除以仅用于图示的目的。图39c是下后枢转接头620
在通过将下闩锁螺纹栓638
如上所述,折叠电机640被构造为经由后轮轴645为枢转线轮654提供动力,后线轮654固定到后轮轴645。 由于后枢转接头620
由此,折叠过程开始: 固定到后环形元件624
滑板车500的后轮盖574也可以作为支架使用。图40a以略微升高的立体图图示出了示例性后轮盖574。图40b是示例后轮盖574的侧视图图示。现在参照图40c,滑板车500在侧视图中被示出,其中滑板车500被示出为处于折叠过程刚好完成之前的瞬时,并且其中后轮572仍然位于道路50的路面上。还参照图40d,其中图40c所示的滑板车500刚刚达到折叠过程完成的最后,并且其中后轮572优选地在空中,在地平面上方,并且滑板车500向后倾斜在现在用作支架的后轮盖574上。
应当理解, 由于滑板车500包括至少两个前轮532, 因此滑板车500能够在没有任意支撑的情况下站立不动。 由此,也能够促进滑板车500的自动行驶。滑板车500可以配备传感器,在没有限制的情况下。例如相机、GPS、控制器、用于远程通信的装置等,从而能够使用远程通信进行操作。
现在参照图41a,示出了自动驾驶机构680的非限制性示例实施例的元件,该自动驾驶机构680包括布置在转向柱510的上柱512内的自动电机682、旋转传动杆684和固定在下柱514上的旋转接收杆686,其中旋转传动杆684和旋转接收杆686可操作地脱离。图41b是图41a中所示的自动驾驶机构680的后视截面图。图41c是自动驾驶机构680的后视图,其中旋转传动杆684和旋转接收杆686可操作地接合。图41d是图41c所示的自动驾驶机构680的后视截面图。
因此,在该示例实施例中,为了激活驱动机构680,上柱512在下柱514上(或内部)向下移动,直到例如当旋转传动杆684的下端的尖部685固定在形成于旋转接收杆686上端的接收开口内时,旋转传动杆684与旋转接收杆686接合。然后, 当启动自动电机682时,与旋转传动杆684旋转连接的旋转传动杆684开始沿选定方向枢转; 固定到旋转传动杆684的旋转接收杆686与旋转传动杆684一起枢转。由于旋转接收杆686固定到下柱514,因此转向柱510随旋转接收杆686一起枢转。为了要脱离自动驾驶,驱动器可以简单地抬起上柱512。
应当理解,通过使用传感器(在没有限制的情况下,例如相机单元和GPS),并通过远程控制与后轮572联接的滑板车电机,滑板车500可以沿任意方向被远程驱动、运送货物、与电池充电装置接合, 以及各种其他任务。
根据本公开的变型, 图42a和图42b示意性地图示出了根据本公开的方案的滑板车700和滑板车701的第三个非限制性示例实施例,其包括转向柱710、具有站立板721和后轮组件770的板面组件720、转向机构730和可选的可拆卸袋799,其中转向柱710处于笔直、直立的位置。站立板721被构造为朝向转弯曲线的内周缘向一侧倾斜,并且被构造为用于支撑通常站在其上的骑乘者。
需要注意的是,滑板车700与滑板车701的区别在于,滑板车700包括电动折叠机构,而滑板车701包括手动折叠机构。在其他方面,滑板车700和滑板车701是相同的。因此,当提及不涉及折叠机构的机构时,与滑板车700相关的描述也适用于滑板车701。
滑板车700(和滑板车701)类似于滑板车500,但特别地(在没有限制的情况下),滑板车700与滑板车500的不同之处在于以下机构的实施:相比于转向机构530的转向机构730;相比于倾斜同步单元540的倾斜同步单元740;相比于倾斜同步组件555的倾斜同步组件755;相比于枢接接口单元560的枢接接口单元760; 以及相比于倾斜输送单元590的倾斜输送单元790。
滑板车700在图42a-图54d中示出。图42a-图54d分别与滑板车500的图22-图41d相似(在没有限制的情况下)。下面分别描述滑板车700的实施例中相比于滑板车500实施例的变型。
参照涉及转向机构730的图42a-图52d。转向机构730促进了骑乘者按照其意愿转动转向柱710以向左或向右转动滑板车700。图42b示意性地图示出了根据本公开的方案的滑板车700,滑板车700处于转向柱710沿着方向717向左枢转并因此也向左倾斜的状态。图43是根据本公开的方案的滑板车701的后视立体示意图,其中转向柱710向左枢转并从而也向左倾斜。倾斜测量以恒定的预构造速率指示倾斜测量。在一个实施例中,转向柱710被细分为上柱712和下柱714,其中上柱712可以在下柱714上可伸缩地滑动。
转向机构730还包括一对前轮732,前轮732通过转向机构与转向柱710互相连接,其中当转向柱710枢转时,前轮(732
图45a是滑板车700/701的前局部视图,示意性地图示出了转向机构730的非限制性示例,其中仅出于可见性的目的,(与转向柱710相关的)一些部件已被移除以仅用于图示的目的,并且其中,滑板车700被示出为处于展开位置(状态)。类似地,图46a是滑板车700的前视图,示意性地图示出了转向机构730,其中仅为了可见性的目的,一些遮挡部分已经被移除以仅用于图示的目的,并且其中滑板车700被示出为处于左转瞬时位置。
图45b是被示出为处于展开位置的滑板车700/701的转向机构730的前视示意图。图45b图示出了参与促进滑板车700/701左转或右转的部件。类似地,图46b是被示出为处于左转瞬时位置的滑板车700/701的转向机构730的前视示意图。图46b图示出了参与促进滑板车700/701转弯(在图46b所示的非限制性示例中为左转)的部件。
转向机构730的利用转向柱710的自动倾斜来参与促进滑板车700/701转向的部件,包括转向柱710、一对前轮732、倾斜同步单元740和一对平衡致动器792(792
应当理解,在骑乘者枢转转向柱710的同时,牢固地附接至转向柱710的枢转接口单元760与转向柱710一起枢转,而在轴承785处枢转地连接至非枢转框架元件780的倾斜输送单元790与转向柱710的枢转运动同步地向一侧倾斜。
这对相似的平衡致动器792(792
应当理解,上端部止动件791
力输送环794牢固且可操作地连接至倾斜输送单元790。因此,力输送环794致动非枢转框架元件780和相应的平衡致动器792(792
还应当理解,还附接至倾斜输送单元790的站立板721被构造为连同倾斜输送单元790一起朝向转弯曲线的内周缘向一侧倾斜(例如,参见图46a和图46b以及例如在下面的图47a中所示的滑板车折叠接口组件800)。
提供图47a和图47b以进一步阐明转向机构730以及枢转接口单元760、倾斜同步单元740、倾斜输送单元790和非枢转框架元件780之间的相互关系。图47a是在滑板车700处于左转瞬时位置的同时,转向机构730部件的后视立面立体图,并且图47b是其前视立面立体图。倾斜同步单元740包括一组四个截头旋转锥742,在枢转转向柱710时(在所示的非限制性示例中,向左),截头旋转锥742与固定的可安装拱形肋744一起促进了转向柱710的自动倾斜。
非枢转框架元件780包括倾斜同步单元保持环782,其被构造为将倾斜同步单元740固定到非枢转框架元件780。另一方面,枢转接口单元760固定至转向柱710,从而当转向柱710被骑乘者或其他方式枢转时,枢转接口单元760与转向柱710一起枢转。图47c是转向机构730部件的一部分的后视示意图,其中转向柱710处于直立位置。
还参照图示出倾斜同步单元740的前俯视立体图的图48a和图示出倾斜同步单元740的前仰视立体图的图48b。作为示例实施例,倾斜同步单元740包括四个截头旋转锥742,它们被布置成使得截头旋转锥742的宽圆形侧可操作地面向转向柱710。在截头旋转锥742的背向转向柱710的窄侧,两个截头旋转锥742
应当理解,在关于滑板车700/701所示的示例实施例中,截头旋转锥742的数量可以变化,其中使用了至少一个上旋转锥742
拱形通道747形成在上截头旋转锥742
应当理解,当转向柱710处于直立位置时,通道747相对于地平线具有初始倾斜角。转向机构730的倾斜同步单元740还可以包括速度偏置电机749,其被构造为: 除了枢转转向柱710的程度之外,还以滑板车700的行驶速度为依据, 以在转弯时偏置转向柱710的倾斜度。速度偏置电机749经由中心轴741可枢转地附接至倾斜同步单元740,其旋转轴线745(例如参见图48e)与速度偏置电机749的旋转轴线重合。
还参照图49a-图49b。图49a图示出了具有倾斜的上平面797
还参照了图50a-图50c。图50a图示出了倾斜同步单元740的俯视立体图,其中可安装拱形肋744被布置在上方的一对截头旋转锥742
枢转接口单元760与枢转接口单元560非常相似, 除了旋转锥连杆组件561被拱形肋连杆组件761代替,该拱形肋连杆组件761被构造为安装可安装拱形肋744,使得可安装拱形肋744将根据转向柱710的任意枢转运动而枢转。在一个实施例中,可安装拱形肋744通过校准螺栓738安装到枢转接口单元760上,校准螺栓738可以根据需要经由固定轴731的螺纹拧紧,如图51a所示。图51b图示出了拱形肋连杆组件761的侧视立体图,其中可安装拱形肋744安装在枢转接口单元760上。
图52a是倾斜同步组件755的前视立体示意图,组件755包括倾斜同步单元740和可安装的拱形肋744,滑板车700处于展开位置,其中转向柱710处于直立位置,并且其中安装在枢转接口单元760的拱形肋连杆臂762的固定轴731上的可安装拱形肋744,与倾斜同步单元740的截头旋转锥742可操作地配对。应当理解, 由于转向柱710处于直立位置,可安装拱形肋744被布置在上截头旋转锥742
图52b是转向机构730的倾斜同步单元740的仰视前立体示意图,滑板车700/701处于展开位置,其中滑板车700被示出为例如处于左转瞬时位置。安装在枢转接口单元760的拱形肋连杆臂762的固定轴731上的可安装拱形肋744,与倾斜同步单元740的截头旋转锥742可操作地配对。应当理解,由于在该示例中转向柱710已向左枢转,可安装拱形肋744被布置在上截头旋转锥742
应当理解, 当(在该示例实施例中)进行右转时,通过向右枢转转向柱710,校准螺栓738朝向滑板车700/701的后端移动。
滑板车700/701的倾斜偏置机构类似于滑板车500的倾斜偏置机构, 除了速度偏置电机749经由中心轴741可枢转地附接至倾斜同步单元740,其旋转轴线745(参见例如图48e)与速度偏置电机749的旋转轴线重合,并且其中倾斜同步单元740包括一组四个截头旋转锥742。
应当理解,倾斜同步单元740可以包括至少两个以上的截头旋转锥742。
还应当理解,枢转接口单元760也可以与倾斜同步单元540可操作地通过接口连接。返回参照图30a-图30d,旋转锥542可由可安装拱形肋744适当地替代,使得当转向柱510/710绕轴线515/715枢转时,面797
图53a是倾斜同步单元940的立面立体图,具有上拱形肋942
图53b是如图53a所示的倾斜同步单元940以及所容纳的可安装拱形肋744的组件950的后视立体图,其中可安装拱形肋744安装在上拱形肋942
图53c是如图53b所示的倾斜同步单元940的组件950和所容纳的可安装拱形肋744的侧视图。图53b和图53c图示出了相似的组件950,其类似于倾斜同步单元540的顶部拱形肋544和底部拱形肋546容纳可安装拱形肋744的实施例。
应当注意,在这样的实施例中,在平面在其他相应平面上滑动的情况下,没有使用旋转锥。
现在参照图54a-图54b。图54a是滑板车701的非限制性示例实施例的下部的后视立面立体示意图,其中根据本公开的方案,滑板车701包括手动折叠机构,并且其中转向柱710处于笔直、直立的位置。
滑板车701类似于滑板车500和700,但特别地(在没有限制的情况下),滑板车701与滑板车500和700的不同之处在于滑板车折叠接口组件800的实施方式主要是手动操作的,而滑板车700的滑板车折叠接口组件600优选是自动的,通常是电动操作的。
图54b是根据本公开实施例的滑板车701的前下部的侧视示意图,其中滑板车701处于直立、展开的平衡状态。在所示状态下,板面组件720的前端(在没有限制的情况下)通常平行于路面,并通过接口型材臂810与前倾斜输送单元590(也参见图28a)互相连接,促进板面组件720的倾斜,同时滑板车701处于展开位置。
在折叠过程中,滑板车折叠接口组件800已经经由例如折叠手柄852被激活,允许接口型材臂810向上折叠, 围绕前线轮652的轴线615枢转,而板面组件720的前端相对于枢转连接的接口型材臂810向上升起, 围绕轴线625枢转(例如,如图34c所示)。整个折叠过程保持相同,但采用了接口型材臂810内部的内锁定机构, 以促进手动折叠。
应当理解,可以使用本领域已知的各种锁定/解锁机构来实现内锁定机构。图55a是根据本公开的一些非限制性示例实施例的接口型材臂810的侧视竖直截面示意图。接口型材臂810包括转向柱710的下后连杆锁定机构870
图55b是根据本公开的一些非限制性示例实施例的接口型材臂810的内部元件的侧视示意图,其中接口型材臂810已被移除以仅用于图示的目的。折叠手柄852示出为处于空闲锁定状态,其中滑板车701处于展开位置。在图55a所示的示例状态中,展开的接收腔661
在一个端部,上中间臂连杆836
图55c是如图55b所示的接口型材臂810的元件的后右侧立面立体图。图55d是如图55a所示的接口型材臂810的右侧视图,其中下后连杆锁定机构870
应当理解,折叠手柄852可以由折叠连杆枢转电机代替,在没有限制的情况下,例如电动电机853,其激活电机接口单元851以为枢转摆动轴连杆838提供动力,从而锁定或解锁下后连杆锁定机构870
图56a图示出了示例阻尼器装置组件900,其被构造为提供对诸如一对平衡致动器(诸如弹簧)148的一对弹簧机构的替代;对一对平衡致动器(例如弹簧)592和布置于中间的力输送环594的替代; 以及对一对平衡致动器(例如弹簧)792和布置于中间的力输送环794的替代。
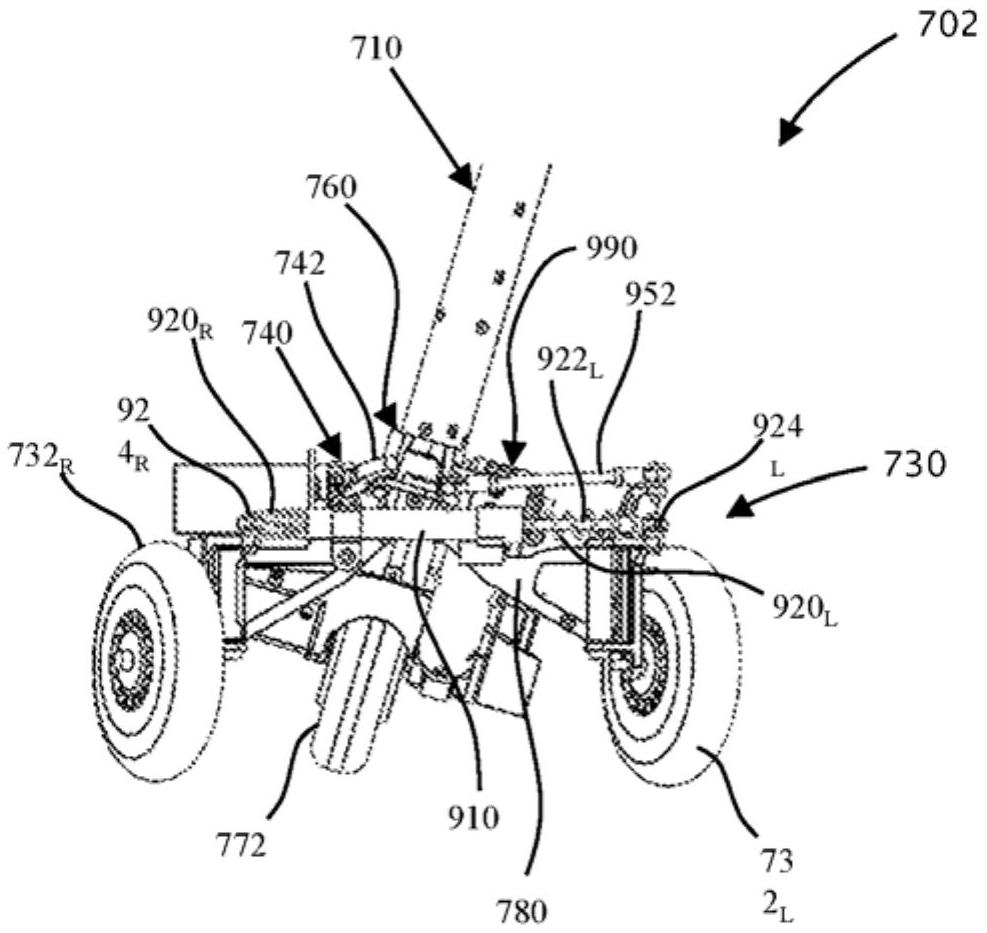
阻尼器装置组件900包括阻尼器单元910、一对相似的平衡致动器(例如弹簧)920(920
图56b是滑板车702的非限制性示例实施例的下部的前立面立体示意图,其中滑板车702包括作为相应转向机构730的一部分的阻尼器装置组件900,并且其中滑板车702被示出为处于直立展开位置(状态)。
图56c是滑板车702的前局部视图,示意性地图示出转向机构730的非限制性示例,包括作为相应转向机构730的一部分的阻尼器装置组件900,其中仅出于可见性的目的,(与转向柱710相关的)一些部件已被移除以仅用于图示的目的,并且其中滑板车702被示出为处于直立展开位置(状态)。在此状态下,平衡致动器920处于平衡休止状态。
这对相似的平衡致动器(922)安装在共同的水平承载杆(922)上,具有第一端部止动件(924
图56d是被示出为处于左转展开位置的滑板车702的转向机构730的前视示意图。在此状态下,平衡致动器920处于非平衡状态,力求返回平衡状态。阻尼器单元910牢固地附接至非枢转框架元件780,而端部止动件924将连杆牢固地附接至转向机构730的相应连杆部件756(756
在所示的左转示例中,两个平衡致动器920对连杆部件756的运动作出反应,其中左平衡致动器920
虽然已经描述了用于元件的示例材料和制造技术和工艺,但是本发明不限于这些材料、技术和工艺。
在不脱离其精神的情况下,可以对本公开的设计和操作进行各种修改。因此, 虽然本公开发明的结构的示例已经在现在被认为代表其示例实施例的内容中进行了解释,但应当理解,在本专利的范围内,本公开发明可以以不同于具体图示和描述的其他方式进行实践。
为了实现本公开的各种实施例,在以上描述和附图中公开的特征单独地和以任意期望的组合都可能是显著的。
尽管本公开发明已在本文中参照优选实施例及其具体示例进行了图示和描述,但是对于本领域普通技术人员来说显而易见的是,其他实施例和示例可以执行相似的功能和/或实现类似的结果。所有这些等同的实施例和示例都在本公开的精神和范围内, 由此被预期,并且旨在被本专利覆盖。
虽然已经描述了本发明的某些实施例,但是这些实施例仅以示例的方式呈现,并不旨在限制本公开的范围。实际上,本文描述的新颖的方法和系统可以以多种其他形式体现;此外,在不脱离本公开的精神的情况下,可以对本文描述的方法和系统的形式进行各种省略、替换和改变。随附的权利要求及其等同物旨在覆盖将落入本公开的范围和精神内的此类形式或修改。
- 电动滑板车的自动控制方法及电动滑板车
- 包括具有转向柱的纵向和/或倾斜调节的转向柱的转向柱模块
- 倾斜铰链托架及具备该倾斜铰链托架的汽车转向柱