一种适用于工业物联网制造的柔性装配抓手及方法
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及机械臂末端执行器技术领域,具体涉及一种适用于工业物联网制造的柔性装配抓手及方法 。
背景技术
机械臂主要负责工业现场中结构性的、重复的、笨重的工作,并向高定位精度、高灵活性和高速度等方向发展。灵巧手则拥有较多的自由度和精确力位控制,但其控制也是较为复杂的。随着工业物联网的发展,传统机械臂交互性差、复杂环境适应性差、不灵活等问题暴露了出来。人们对机械抓手提出了新的要求,因而近年来柔性机械抓手引起了广泛关注。
在机器人自动装配过程中,若存在夹具误差、装配零件的误差,有可能会导致装配不到位的情况,如果采用机械硬连接的方式,则可能会导致工装损坏、零件损坏、机器人超负载报警等情况,因此,采用柔性可调工装能避免以上的情况,从而提升设备的稼动率。
发明内容
本发明提供了一种适用于工业物联网制造的柔性装配抓手及方法,目的在于解决传统刚性抓手适应性差,易损坏工件、安装效率低的技术问题。
为解决上述问题,本发明采用的技术方案是:
一种适用于工业物联网制造的柔性装配抓手 ,包括固定部、移动部和抓取部,其特征在于,所述固定部为法兰盘,所述法兰盘与机械臂连接,所述移动部与固定部通过导轨与滑块配合的形式连接,所述移动部上设置槽型光电开关挡片,所述固定部上设置槽型光电开关接收器可感知移动部和固定部相对滑动,所述抓取部固定在移动部的底部。
进一步,所述槽型光电开关挡片和槽型光电开关接收器构成槽型光电开关,所述槽型光电开关与机器人控制系统连接。
进一步的,所述法兰盘的底部后端设置有弹簧安装座,所述弹簧安装座上设置有弹簧,所述法兰盘左右两边设置有导轨,弹簧位于两个导轨之间。
进一步的,所述移动部的顶部左右两边设置滑块,所述滑块与法兰盘上的导轨配合,所述移动部顶部前端设置挡块,所述挡块与弹簧的另一端连接且使弹簧处于压缩状态,所述固定部的前端设置有限位块,所述限位块与挡块接触完成限位。
进一步的,所述移动部上还设置有压紧气缸,所述压紧气缸竖直设置,所述压紧气缸的活塞杆作用方向垂直于抓取部。
进一步的,所述压紧气缸的活塞杆末端连接有与被抓取物外形相匹配的压块。
进一步的,所述抓取部上设置有置物槽,所述置物槽的尺寸与被抓取物的外形相匹配。
进一步的,所述置物槽后端的左右两边均设置有限位杆。
进一步的,所述置物槽内嵌入安装有光纤传感器。
一种适用于工业物联网制造的柔性装配抓手的抓取方法及装配方法,包括如下步骤:
S1,启动机器人,机械臂驱动柔性抓手运动至工件装载工位,将工件卡入置物槽;
S2,感应元件光纤传感器判断工件是否装夹到位,若未装夹到位柔性抓手运动至下一工位抓取,若识别装夹到位压紧气缸向下行程压紧工件,完成工件的抓取;
S3,抓取完成后,夹持工件移动至电池盖安装工位进行安装,柔性抓手采用弹簧配合槽型光电开关判断工件是否安装到位,若正常安装不会触发槽型光电开关,若工件安装未完成,机械臂推动抓手导致弹簧继续压缩,槽型光电开关接收器被槽型光电开关挡片挡住,从而识别到其未安装到位,将控制机械臂进行第二次安装,如果弹簧仍压缩,工件仍未安装到位时,控制抓手扔掉所夹取的工件,重新夹取新工件进行安装。
基于上述技术方案,可产生如下技术效果:
本发明提供了一种适用于工业物联网制造的柔性装配抓手及方法,其固定部与移动部为滑动连接,通过弹簧的作用将移动部顶出并保持一个稳定的位置;抓取部上设置的光纤传感器可以实现判断是否抓取成功;本柔性抓手采用弹簧配合槽型光电开关以识别是否完成工件的安装,正常情况下机器人推动柔性抓手,带动抓取部嵌入至安装部,完成安装,而当工件未准确完成安装时,机器人推动抓手导致弹簧压缩,槽型光电开关感知到弹簧压缩时,说明电池盖未安装到位,将控制机器人进行第二次安装,如果弹簧仍压缩,工件仍未安装到位时,控制抓手扔掉所夹取的工件,重新夹取新工件进行安装;本发明可以弥补采用传统刚性抓手时,当工件未能准确安装时,仅能通过感知并报警的方式通知人工进行处理,效率低下、易损坏工件及设备的问题。
附图说明
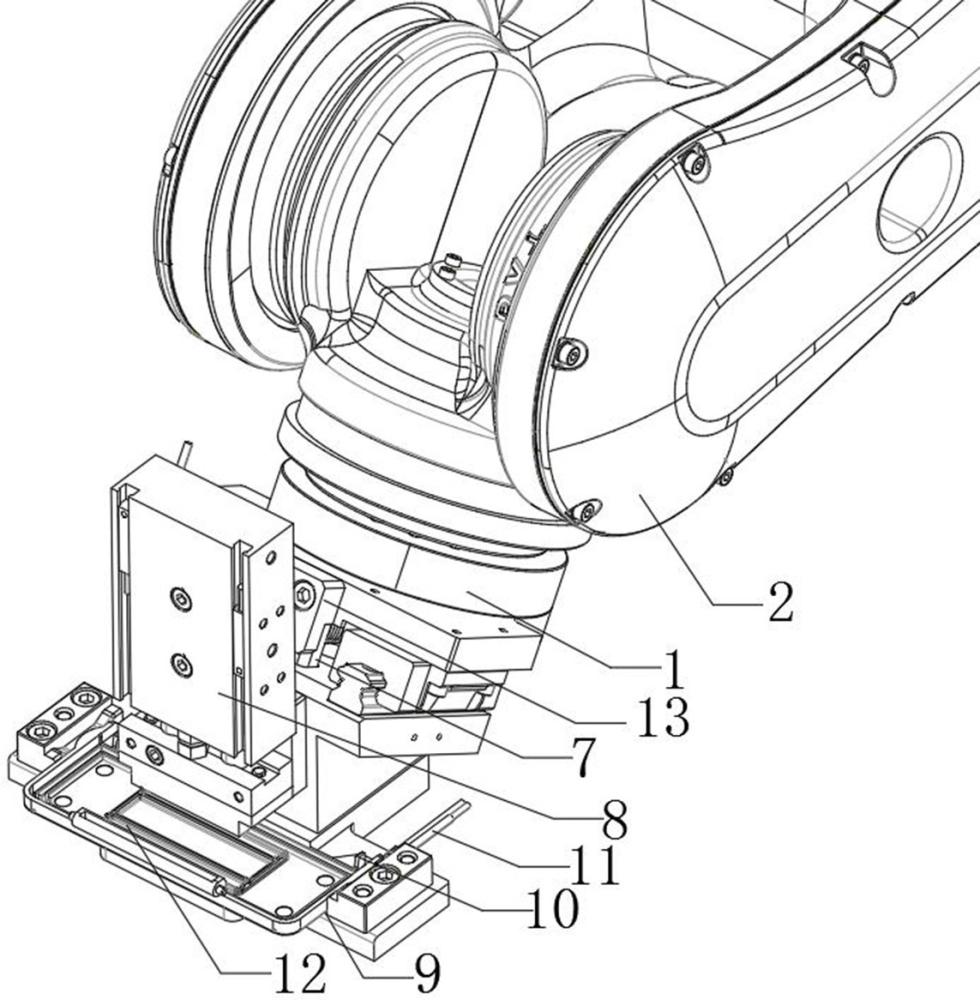
图1是本发明柔性抓手结构示意图;
图2是本发明槽型光电开关安装示意图;
图3是本发明弹簧安装示意图。
图中:1-法兰盘,2-机械臂,3-槽型光电开关挡片,4-槽型光电开关接收器,5-弹簧安装座,6-弹簧,7-挡块,8-压紧气缸,9-置物槽,10-限位杆,11-光纤传感器,12-电池盖,13-限位块。
实施方式
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-图3所示,一种适用于工业物联网制造的柔性装配抓手 ,包括固定部、移动部和抓取部,所述固定部为法兰盘1,所述法兰盘1与机械臂2连接,所述移动部与固定部通过导轨与滑块配合的形式连接,所述移动部上设置槽型光电开关挡片3,所述固定部上设置槽型光电开关接收器4可感知移动部和固定部相对滑动,所述抓取部固定在移动部的底部,固定部与移动部通过导轨滑块连接,当固定部与移动部之间发生相对的滑动,那么移动部上设置的槽型光电开关挡片3会移动至遮挡固定部上设置的槽型光电开关接收器4,从而实现感知移动部和固定部的相会滑动。
作为可选或优选方案,所述槽型光电开关挡片3和槽型光电开关接收器4构成槽型光电开关,所述槽型光电开关与机器人控制系统连接。
作为可选或优选方案,所述法兰盘1的底部后端设置有弹簧安装座5,所述弹簧安装座5上设置有弹簧6,所述法兰盘1左右两边设置有导轨,弹簧6位于两个导轨之间。
作为可选或优选方案,所述移动部的顶部左右两边设置滑块,所述滑块与法兰盘1上的导轨配合,所述移动部顶部前端设置挡块7,所述挡块7与弹簧6的另一端连接且使弹簧6处于压缩状态,所述固定部的前端设置有限位块13,所述限位块13与挡块7接触完成限位,使移动部与固定部之间可以相对滑动,但由于正常情况下移动部与固定部需要保持相对静止,所以两者之间设置弹簧6,通过弹簧6的弹力将移动部挡块7顶至限位块13,而当移动部收到外力作用下又可以通过压缩弹簧6发生滑动,进而能够触发槽型光电开关。
作为可选或优选方案,所述移动部上还设置有压紧气缸8,所述压紧气缸8竖直设置,所述压紧气缸8的活塞杆作用方向垂直于抓取部。
作为可选或优选方案,所述压紧气缸8的活塞杆末端连接有与被抓取物外形相匹配的压块,通过压紧气缸8下压,对工件实现纵向限位。
作为可选或优选方案,所述抓取部上设置有置物槽9,所述置物槽的尺寸与被抓取物的外形相匹配,便于被抓取物顺利卡入置物槽9。
作为可选或优选方案,所述置物槽9后端的左右两边均设置有限位杆10,通过限位杆10将工件横向限位在置物槽9中。
作为可选或优选方案,所述置物槽9内嵌入安装有光纤传感器11,由于光纤传感器11的特性,当待取工件成功被夹取,会遮挡光纤传感器11,光纤传感器11给出信号,判断工件是否夹取成功。
一种适用于工业物联网制造的柔性装配抓手的抓取方法及装配方法,包括如下步骤:
S1,启动机器人,机械臂2驱动柔性抓手运动至工件装载工位,将工件卡入置物槽9;
S2,感应元件光纤传感器11判断工件是否装夹到位(工件安装到位后会遮挡住光纤传感器11,光纤传感器11发出信号至机器人控制系统并判断工件装夹到位,反之则是工件装夹不到位),若未装夹到位柔性抓手运动至下一工位抓取,若识别装夹到位压紧气缸8向下行程压紧工件,完成工件的抓取;
S3,抓取完成后,夹持工件移动至电池盖安装工位进行安装,柔性抓手采用弹簧6配合槽型光电开关判断工件是否安装到位(安装到位时,移动部和固定部之间不会发生相对的移动,即槽型光电开关接收器4不会被槽型光电开关挡片3,控制系统判断安装到位),若正常安装不会触发槽型光电开关,若工件安装未完成,机械臂推动抓手移动部受力导致弹簧6继续压缩,槽型光电开关接收器4被槽型光电开关挡片3挡住,槽型光电开关给出信号,从而识别到其未安装到位,将控制机械臂进行第二次安装,如果弹簧6仍压缩,槽型光电开关接收器4被槽型光电开关挡片3挡住,工件仍未安装到位时,控制抓手扔掉所夹取的工件,重新夹取新工件进行安装。
下面以燃气表控制盒电池盖自动装配为例,说明本发明的工作原理:
本发明提供的一种适用于工业物联网制造的柔性装配抓手的法兰盘1与机械臂2固定连接,机械臂2驱动柔性抓手运动至电池盖12装载工位,将电池盖12卡入置物槽9,压紧气缸8向下行程压紧电池盖12,完成工件的抓取。感应元件光纤传感器11可识别是否成功夹取到电池盖12,未识别到时控制机械臂带动柔性抓手移动到下一工位夹取电池盖12,夹取电池盖12后移动至电池盖安装工位进行安装;柔性抓手采用弹簧6配合槽型光电开关以识别是否完成电池盖12的安装,正常情况下机械臂推动柔性抓手,带动电池盖12安装部嵌入至控制盒侧衔接部,完成安装。而当电池盖12未准确完成安装时,机械臂推动抓手导致弹簧6继续压缩,槽型光电开关接收器4被槽型光电开关挡片3挡住,从而识别到其未安装到位,将控制机械臂进行第二次安装,如果弹簧6仍压缩,电池盖12仍未安装到位时,控制抓手扔掉所夹取的电池盖12,重新夹取新电池盖12进行安装。
上面结合附图和实施例对本发明作了详细说明,但是本发明不限于上述实施例,在本领域普通技术人员所具备的只是范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 一种工业机器人协同柔性装配系统及控制方法
- 适用于工业物联网制造的齿轮轴装配机构及装配方法
- 适用于工业物联网制造的抓取机构、机械手、装配方法