信息处理设备、信息处理方法和程序
文献发布时间:2024-01-17 01:28:27
技术领域
本公开内容涉及信息处理设备、信息处理方法和程序。
背景技术
近年来,已知用于利用施加到用户的与有形对象相关的力来确定施加到用户的负荷的技术。例如,已经公开了如下技术:测量正举起有形对象的用户的姿势,并且基于测量结果确定施加在用户身体上的负荷(例如,参见专利文献1)。此外,还公开了如下技术:测量正举起有形对象的用户的姿势,并且基于测量结果确定用户的姿势是否是使用户的身体承受相当大的压力的姿势(例如,参见专利文献2)。
[引用列表]
[专利文献]
[专利文献1]
JP 2020-124464A
[专利文献2]
JP 2020-116684A
发明内容
[技术问题]
然而,人们希望提供这样一种技术,该技术能够利用施加到用户的与有形对象相关的力来更有效地减少施加到用户的负荷。
[问题的解决方案]
根据本公开内容的一个方面,提供了一种信息处理设备,该信息处理设备包括控制单元,该控制单元被配置成:基于用户的状态,估计由用户关于施加到用户的与有形对象相关的力预测的第一量,以及基于第一量和关于所述力预先登记的第二量,控制向用户的信息呈现。
此外,根据本公开内容的另一个方面,提供了一种信息处理方法,该信息处理方法包括:由处理器基于用户的状态,估计由用户关于施加到用户的与有形对象相关的力预测的第一量,以及由处理器基于第一量和关于所述力预先登记的第二量,控制向用户的信息呈现。
此外,根据本公开内容的又一个方面,提供了一种程序,该程序使计算机用作信息处理设备,所述信息处理设备包括控制单元,该控制单元被配置成:基于用户的状态,估计由用户关于施加到用户的与有形对象相关的力预测的第一量,以及基于第一量和关于力预先登记的第二量,控制向用户的信息呈现。
附图说明
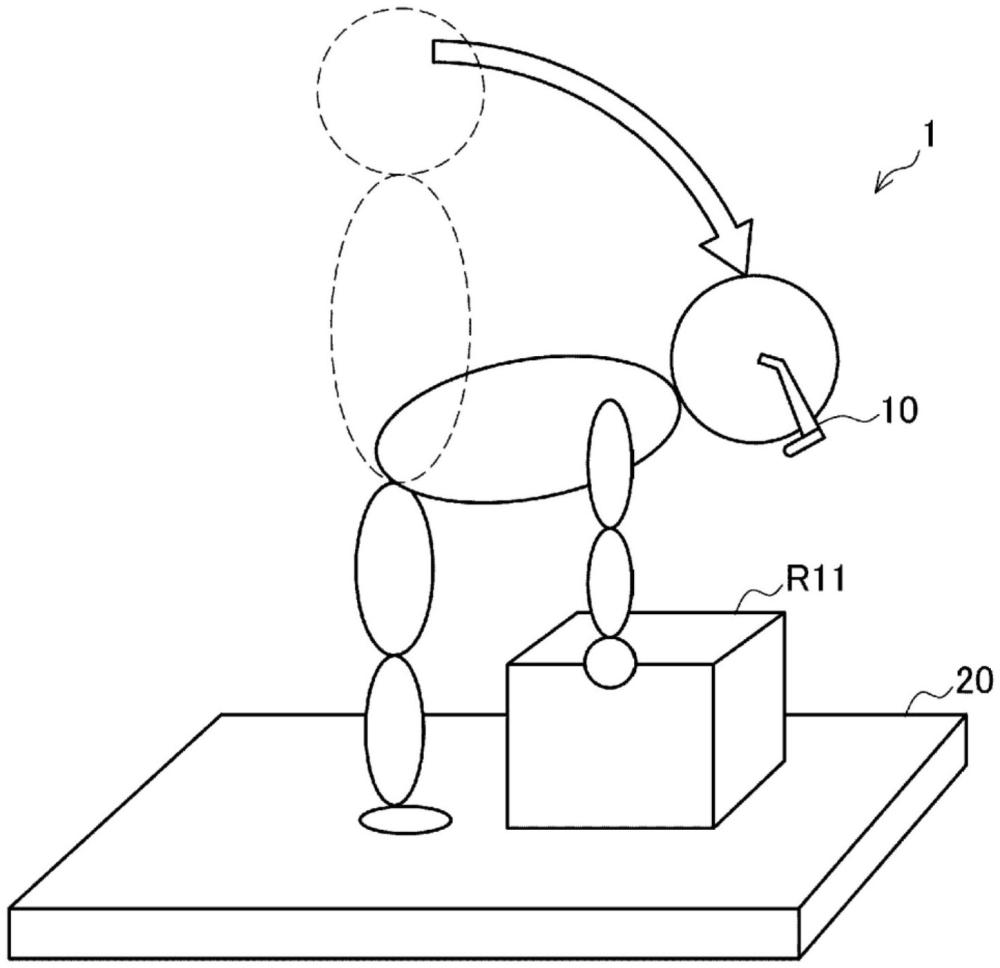
图1是用于描述根据本公开内容的实施方式的信息处理系统的配置示例的图。
图2是示出根据实施方式的信息处理设备的功能配置示例的图。
图3是示出根据实施方式的信息处理设备的大体操作示例的流程图。
图4是描绘举起轻的有形对象的用户的压力中心的速度的时间变化的图。
图5是描绘举起中等重量的有形对象的用户的压力中心的速度的时间变化的图。
图6是描绘举起重的有形对象的用户的压力中心的速度的时间变化的图。
图7是通过举例示出处理有形对象的风险水平高于预定水平的情况的图。
图8是用于描述控制对用户呈现信息的概要的图。
图9是用于描述改变有形对象的大小的示例的图。
图10是用于描述改变有形对象的亮度的示例的图。
图11是用于描述控制对象的运动的示例的图。
图12是用于描述控制另一个人的运动的示例的图。
图13是用于描述用于增大感知质量的技术的第一修改例的图。
图14是用于描述用于增大感知质量的技术的第二修改例的图。
图15是示出感知质量与有形对象的大小之间的相关函数的示例的图。
图16是用于描述第一修改例的图。
图17是用于描述其中虚拟对象随着应用的进展而动态变化的第一示例的图。
图18是用于描述其中虚拟对象随着应用的进展而动态变化的第二示例的图。
图19是用于描述第二修改例的图。
图20是用于描述第三修改例的图。
图21是描绘信息处理设备的硬件配置示例的框图。
具体实施方式
参照附图,下面将详细描述本公开内容的优选实施方式。注意,在本说明书和附图中,具有基本相同的功能配置的部件由相同的附图标记表示,并且省略了对这些部件的重复描述。
此外,在本说明书和附图中,在一些情况下,具有基本相同或相似的功能配置的多个部件通过将不同的数字附加到相同的附图标记来彼此区分。然而,在具有基本相同或相似的功能配置的多个部件不需要特别彼此区分的情况下,这些部件仅由相同的附图标记表示。此外,在一些情况下,不同实施方式中的类似部件通过将不同的字母字符附加到相同的附图标记来彼此区分。然而,在这些类似的部件不需要特别区分的情况下,这些部件仅由相同的附图标记表示。
注意,描述是按以下顺序给出的。
0.概要
1.实施方式的细节
1.1.系统配置示例
1.2.功能配置示例
1.3.功能细节
2.第一修改例
3.第二修改例
4.第三修改例
5.硬件配置示例
6.结论
<0.概要>
首先,将描述本公开内容的实施方式的概要。近年来,已知用于利用施加到用户的与有形对象相关的力来确定施加到用户的负荷的技术。例如,已经公开了如下技术:测量正举起有形对象的用户的姿势,并且基于测量结果确定施加在用户身体上的负荷。此外,还公开了如下技术:测量正举起有形对象的用户的姿势,并且基于测量结果确定用户的姿势是否是使用户的身体承受相当大的压力的姿势。
在本公开内容的实施方式中,主要提出了如下技术,该技术能够利用施加到用户的与有形对象相关的力有效地减少施加到用户的负荷。更具体地,在上述公开的技术中,测量实际举起有形对象的用户的姿势。因此,只有在用户实际举起有形对象之后,才能确定基于测量结果确定的施加到用户的负荷。
然而,在实际对用户施加与有形对象相关的力之前,用户可以通过在视觉上识别有形对象,来事先预测与施加到用户的与有形对象相关的力相关的量(第一量)。此时,关键的是确定用户预测的力的量。首先将解释为什么这是关键的原因。
注意,本公开内容的实施方式假设了在视觉上识别有形对象的用户处理该有形对象的情况。此时,本公开内容的实施方式主要假设由用户处理的有形对象是真实对象的情况。然而,如后面的修改例等所述,由用户处理的有形对象可以是虚拟对象。
此外,下面主要假设如下情况:施加到用户的与有形对象相关的力的方向是向下的(例如,用户举起有形对象的情况)。即,在这种情况下,用户预测致使向下向用户施加的与有形对象相关的力的量(有形对象的质量)。因此,与由用户预测的力相关的量(第一量)也被表达为“感知质量M1”。感知质量M1可以是作为有形对象的示例的真实对象的质量。替选地,如后面的修改例等所述,感知质量M1可以是作为有形对象的示例的虚拟对象的准质量。
然而,施加到用户的与有形对象相关的力的方向不必是向下的。即,用户可以预测施加到用户的与有形对象相关的力(不限于向下的力)的大小。换言之,与由用户预测的力相关的量(第一量)不必是有形对象的质量,并且可以是施加到用户的与有形对象相关的力的大小。
另一方面,在系统中,预先登记与施加到用户的与有形对象相关的力相关的量(第二量)。在系统中登记的与力相关的量对应于与系统意图呈现给用户的力相关的量。
注意,下面假设如下情况:在系统中预先登记致使向下向用户施加与有形对象相关的力的量(有形对象的质量)。因此,在系统中预先登记的与力相关的量(第二量)在下面也表示为“系统意图呈现的质量M2”。系统要呈现的质量M2可以是作为有形对象的示例的真实对象的已知质量。替选地,如后面的修改例等所述,系统要呈现的质量M2可以是作为有形对象的示例的虚拟对象的已知的准质量。
然而,在系统中,可以登记施加到用户的与有形对象相关的力(不限于向下的力)的大小。换言之,在系统中登记的与力相关的量(第二量)不必是有形对象的质量,并且可以是施加到用户的与有形对象相关的力的大小。
这里,在系统意图呈现的质量M2与感知质量M1之间存在差的情况下,可能会造成以下障碍和负荷。障碍和负荷的可能性可能随着系统意图呈现的质量M2与感知质量M1之间的差的增加而增加。注意,这种障碍和负荷的示例包括身体障碍、有形对象障碍和认知负荷。
身体障碍:例如,在用户举起的有形对象较重的情况下、在与举起包裹的用户的脚接触的表面(立足处)较滑的情况下、或者在用户举起的有形对象具有特有形状的情况下,用户可能无法适当地控制自己的身体。此时,对用户的身体造成的伤害等对应于“身体障碍”。
物质障碍:与身体障碍的情况一样,用户有可能无法适当地控制自己的身体。此时,对有形对象的损坏(财产损坏)对应于“物质障碍”。注意,对于财产损坏,在有形对象具有高价值(例如,有形对象非常稀或者或贵重)或者有形对象极有可能被损坏的情况下,例如,物质障碍会特别关键。
认知负荷:在力呈现装置向用户提供与作为有形对象的示例的虚拟对象相关的力(力反馈)的情况下,用户基于对虚拟对象的视觉识别而预测的力可能无法与力呈现装置意图呈现的量相匹配。在这种情况下,用户会感到处理感觉之间的不匹配感。随着系统意图呈现的质量M2与感知质量M1之间的差的增加,处理感觉之间的不匹配感可能更强。注意,正如下文也描述的那样,能够进行AR(增强现实)显示或VR(虚拟现实)显示的显示器可以显示虚拟对象。
为了减少上述障碍和负荷的可能性,必须在对用户施加与有形对象相关的力之前确定感知质量M1,而且还必须消除系统意图呈现的质量M2与感知质量M1之间的差。从而,用户可以按照预测来处理有形对象。
已在上文描述了本公开内容的实施方式的概要。
<1.实施方式的细节>
现在,将详细描述本公开内容的实施方式。
(1.1.系统配置示例)
首先,将描述根据本公开内容的实施方式的信息处理系统的配置示例。
图1是用于描述根据本公开内容的实施方式的信息处理系统的配置示例的图。如图1所描绘的,用1表示的根据本公开内容的实施方式的信息处理系统包括信息处理设备10和传感器单元20。
本公开内容的实施方式主要假设信息处理设备10是佩戴在用户身上的AR装置(例如,AR眼镜)的情况。然而,信息处理设备10不限于AR装置。例如,信息处理设备10可以是AR装置以外的任何可穿戴装置(例如,VR装置等)。替选地,信息处理设备10可以是除可穿戴装置以外的任何终端(例如,智能手机等)。
传感器单元20包括用于按时间序列检测用户的状态的传感器。传感器单元20向信息处理设备10连续输出用户的状态的检测结果。本公开内容的实施方式主要假设如下情况:传感器单元20检测用户的姿势作为用户的状态的示例。此时,传感器单元20向信息处理设备10输出与检测结果对应的关于用户的姿势信息。然而,传感器单元20可以检测除用户的姿势之外的任何状态作为用户的状态的示例。
此外,本公开内容的实施方式主要假设如下情况:传感器单元20包括用于测量用户鞋底压力的传感器(即鞋底压力测量装置)。然而,传感器单元20不限于特定类型。将在后面详细描述传感器单元20的变型。此外,作为鞋底压力测量装置,可以使用以下任何一种类型:测量鞋底表面上的压力分布的鞋底压力分布测量类型;测量从地板作用于鞋底的反作用力的地板反作用力测量类型,等等。此外,在图1中描绘的示例中,传感器单元20是安装在地板表面上的安装类型的鞋底压力测量装置。然而,传感器单元20可以是置于鞋内的鞋垫类型的鞋底压力测量装置。
在图1所示的示例中,描绘了由用户处理的有形对象R11。用户要举起该有形对象R11。在此,作为示例,假设如下情况:有形对象R11是真实对象(具体为包裹),并且处理该有形对象R11的用户是转移(例如,安装或递送)包裹的工作人员。在本文中可以假设,包裹的示例包括精密装置和艺术品。然而,有形对象R11不限于特定的类型。
上面已经描述了根据本公开内容的实施方式的信息处理系统的配置示例。
(1.2.功能配置示例)
现在,将描述根据本公开内容的实施方式的信息处理设备10的功能配置示例。图2是示出根据本公开内容的实施方式的信息处理设备10的功能配置示例的图。如图2所描绘的,根据本公开内容的实施方式的信息处理设备10包括控制单元110、操作单元130、存储单元140和呈现单元150。信息处理设备10连接至传感器单元20。
(控制单元110)
控制单元110可以包括例如一个或更多个CPU(中央处理单元)等。在控制单元110包括诸如CPU的处理装置的情况下,这种处理装置可以包括电子电路。控制单元110可以由这样的处理装置执行程序来实现。控制单元120包括估计部112和呈现控制部114。将在后面详细描述这些块的具体功能。
(操作单元130)
操作单元130包括接收用户输入的操作的功能。例如,操作单元130可以包括诸如触摸面板或按钮的输入装置。例如,操作单元130接收由用户触摸操作单元130进行的操作作为确定操作。此外,由操作单元130接收的确定操作可以致使执行与信息处理设备10的姿态对应的处理。
(存储单元140)
存储单元140是包括存储器并且存储要由控制单元110执行的程序和执行程序所需的数据(各种数据库等)的记录介质。此外,存储单元140临时存储用于由控制单元110执行的计算的数据。存储单元140包括磁存储单元装置、半导体存储装置、光学存储装置、磁光存储装置等。
(呈现单元150)
呈现单元150是在控制单元110的控制下呈现各种类型的信息的呈现装置的示例。呈现单元150包括显示部152、声音输出部154和力呈现部156。
(显示部152)
显示部152包括显示器。本公开内容的实施方式主要假设如下情况:显示部152包括透射式显示器,该透射式显示器允许用户在真实空间中在视觉上识别图像。然而,显示部152可以是光学透视显示器或者可以是视频透视显示器。替选地,显示部152可以是非透射式显示器,该非透射式显示器呈现具有与真实空间对应的三维结构的虚拟空间中的图像,而不是呈现真实空间中的图像。
透射式显示器通常用于AR(增强现实),而非透射式显示器通常用于VR(虚拟现实)。显示部152可以包括用于AR和VR两种应用的XR(X现实)显示器。例如,显示部152以AR方式显示虚拟对象,并且以UI方式显示文本等。
(声音输出部154)
声音输出部154是在控制单元110的控制下呈现各种类型的信息的呈现装置的示例。本公开内容的实施方式主要假设如下情况:显示部152呈现各种类型的信息。然而,代替显示部152或者除了显示部152之外,声音输出部154可以呈现各种类型的信息。此时,声音输出部154充当扬声器,该扬声器在控制单元110的控制下将各种类型的信息作为声音进行输出。
(力呈现部156)
力呈现部156是在控制单元110的控制下呈现各种类型的信息的呈现装置的示例。本公开内容的实施方式主要假设如下情况:显示部152呈现各种类型的信息。然而,代替显示部152或者除了显示部152之外,力呈现部156可以呈现各种类型的信息。此时,力呈现部156充当在控制单元110的控制下通过使用力来呈现各种类型的信息的力呈现装置。
上面已经描述了根据本公开内容的实施方式的信息处理设备10的功能配置示例。
(1.3.功能细节)
现在,参照图3至图15(也适当参照图1和图2),将描述根据本公开内容的实施方式的信息处理设备10的功能细节。首先,参照图3,将描述根据本公开内容的实施方式的信息处理设备10的大体操作示例。
(大体操作示例)
图3是示出根据本公开内容的实施方式的信息处理设备10的大体操作示例的流程图。传感器单元20按时间序列检测用户的姿势。这里,传感器单元20检测在从即将处理有形对象的用户的运动(例如,用于举起有形对象R11的准备运动)开始直到处理有形对象的开始(例如,用户接触有形对象R11的时间点)的间隔期间用户的姿势。
传感器单元20向信息处理设备10连续输出检测结果作为关于用户的姿势信息。然后,信息处理设备10的估计部112获取从传感器单元20输出的关于用户的姿势信息。估计部112在存储单元140中积累获取的关于用户的姿势信息(S11)。估计部112基于从传感器单元20输出的关于用户的姿势信息,估计用户所感知的质量M1(S12)。
呈现控制部114基于由估计部112估计的感知质量M1和系统意图呈现的质量M2,控制呈现给用户的信息。这消除了系统意图呈现的质量M2与感知质量M1之间的差,使得能够利用施加到用户的与有形对象相关的力有效地减少施加到用户的负荷。
更具体地,呈现控制部114根据系统意图呈现的质量M2和感知质量M1计算差G(S13)。然后,呈现控制部114基于计算的差G来控制呈现给用户的信息。
更具体地,呈现控制部114确定计算的差G是否超过预定阈值Th(S14)。然后,在计算的差G超过阈值Th的情况下(S14中的“是”),基于差G超过阈值Th,呈现控制部114控制呈现单元150向用户呈现预定信息(S15)。另一方面,在计算的差G不超过阈值Th的情况下,不需要控制呈现给用户的信息。
上面已经描述了根据本公开内容的实施方式的信息处理设备10的大体操作示例。
(S12:对感知质量M1的估计)
现在,参照图4至图6,将详细描述对感知质量M1的估计。
根据学术知识已经知道,当用户要举起有形对象时,有形对象的质量与用户的姿势变化之间存在相关性。因此,对于多个不同的有形对象中的每一个,估计部112在存储单元140中预先积累有形对象的质量与举起该有形对象的用户的姿势变化之间的对应关系作为积累的数据,并且基于积累的数据来确定有形对象与用户的姿势变化之间的相关性(相关函数)。因此,估计部112可以基于事先确定的相关性和关于用户的姿势信息来估计感知质量M1。
通常期望有形对象的质量与用户的姿势变化之间的这种相关性不仅在用户举起有形对象的情况下,而且在用户处理有形对象的情况下都是成立的。即,正如有形对象的质量与用户的姿势变化之间的相关性的情况一样,也可以想象,施加到用户的与有形对象相关的力的大小与用户的姿势变化之间存在相关性。
(压力中心被用作姿势信息的情况)
注意,如上所述,本公开内容的实施方式主要假设如下情况:传感器单元20包括鞋底压力测量装置。鞋底压力测量装置可以测量与作用在地板与用户身体之间的接触表面上的力的分布中心对应的压力中心(COP)。这里,首先,将描述压力中心(COP)被用作关于用户的姿势信息的情况。
更具体地,关于用户举起的有形对象的质量与压力中心(COP)之间的相关性,根据学术知识已经知道,在有形对象具有小质量的情况下,与有形对象具有大质量的情况相比,压力中心的变化很小。因此,估计部112只需要基于预先确定的有形对象的质量与压力中心的变化之间的相关性以及新测量的用户的压力中心的变化来估计感知质量M1。参照图4至图6,将描述有形对象的质量与压力中心的变化之间的相关性的示例。
图4是描绘举起轻的有形对象的用户的压力中心的速度的时间变化的图。图5是描绘举起中等重量的有形对象的用户的压力中心的速度的时间变化的图。图6是描绘举起重的有形对象的用户的压力中心的速度的时间变化的图。在图4至图6中的任何一个中,横轴对应于时间,纵轴对应于压力中心(COP)的速度。注意,在纵轴上,正方向(向上的方向)与从脚跟到脚趾的方向匹配。
此外,图4至图6都描绘了“开始伸手”、“接触有形对象”和“举起结束”。“开始伸手”对应于即将处理有形对象的用户的运动的开始(例如,举起有形对象的准备运动)。“接触有形对象”对应于处理有形对象的开始(例如,用户接触有形对象的时间点)。“举起结束”对应于举起有形对象的结束。
此外,图4描绘了向后移位的开始(与时间点T11对应的纵轴上的数值)、向前移位的初始峰值(与时间点T12对应的纵轴上的数值)、以及初始峰值的最小值(与时间点T13对应的纵轴上的数值)。“向前移位”是在测量到向后移位之后测量的。
与图4类似,图5描绘了向后移位的开始(与时间点T21对应的纵轴上的数值)、向前移位的初始峰值(与时间点T22对应的纵轴上的数值)、以及初始峰值的最小值(与时间点T23对应的纵轴上的数值)。此外,图6描绘了向后移位的开始(与时间点T31对应的纵轴上的数值)、向前移位的初始峰值(与时间点T32对应的纵轴上的数值)、以及初始峰值的最小值(与时间点T33对应的纵轴上的数值)。
图4至图6中示出的示例指示,向前移位的初始峰值与初始峰值的最小值之间的差随着有形对象的质量的增加(即,随着质量从图4到图5到图6的增加)而增加。因此,估计部112只需要预先确定其中有形对象的质量随着向前移位的初始峰与初始峰的最小值之间的差的增加而增加的相关函数,并且基于这样的相关函数和新测量的差(即,向前移位的初始峰与初始峰的最小值之间的差)来估计感知质量M1。
(姿势信息的修改例)
注意,已经主要描述了使用压力中心(COP)作为关于用户的姿势信息的情况。然而,除压力中心(COP)之外的任何信息都可以用作关于用户的姿势信息。例如,用户身体的重心位置随着用户姿势的变化而变化。因此,重心(COG)可以用作关于用户的姿势信息。
例如,在信息处理设备10包括摄像装置的情况下,可以使用光学运动捕获。光学运动捕获通过基于摄像装置图像跟踪附到用户的体节的光学反射标记来跟踪用户的每个体节的位置。替选地,在传感器单元20包括磁传感器的情况下,可以使用磁运动捕获。磁运动捕获通过使用由佩戴在用户身体上的磁传感器检测到的磁场线来跟踪用户的每个体节的位置。
估计部112可以使用这样的运动捕获来确定每个体节(例如,头部、臂区等)的重心位置和质量。然后,估计部112可以基于上半身的每个体节的重心位置和质量来确定上半身的重心,并且基于下半身的每个体节的重心位置和质量来确定下半身的重心。此外,估计部112可以通过将上半身的重心和下半身的重心进行结合来计算用户身体的重心。
替选地,质心(COM)可以用作关于用户的姿势信息。然而,在重力均匀地作用于用户身体的情况下,质心(COM)与用户身体的重心(COG)相匹配。注意,根据学术知识已经知道,在压力中心(COP)与质心(COM)之间存在相关性。
替选地,用户的肌电图(EMG)可以用作关于用户的姿势信息。例如,在传感器单元20包括有线或无线肌电图仪的情况下,肌电图仪被用来获得用户肌肉收缩时产生的动作电位。如上所述测量的动作电位可以用作关于用户的姿势信息。
注意,根据学术知识已经知道,在用户举起对象之前,在用户的身体(例如,脚、手臂等)中会出现肌肉活动(肌电势变化)。此外,根据学术知识还知道,在用户知道落下的球的重量的情况下,要接住落下的球的用户的预期姿势调整(APA)的程度随着球的重量的增加而增加。
上面已经详细描述了对感知质量M1的估计。
(S13:差G的计算)
现在,将详细描述差G的计算。
如上所述,呈现控制部114根据系统意图呈现的质量M2和感知质量M1计算差G。在此,假设如下情况:呈现控制部114基于从系统意图呈现的质量M2中减去感知质量M1来计算差G。然而,呈现控制部114可以基于从感知质量M1中减去系统意图呈现的质量M2来计算差。在这种情况下,阈值Th在正值与负值之间切换,并且基于差G与阈值Th之间的比较结果的操作也被反转。
注意,假设处理有形对象的风险水平根据情况而改变。例如,在处理有形对象的风险水平高于预定水平的情况下,有形对象需要被更小心地处理。因此,呈现控制部114可以将预定量加到系统意图呈现的质量M2中,并且基于从系统意图呈现的并且已经加上了预定量的质量M2中减去感知质量M1来计算差G。注意,将预定量加到系统意图呈现的质量M2与从阈值Th中减去预定量是同义的。
例如,处理有形对象的风险水平高于预定水平的情况的示例可以是处理有形对象的难度水平高于预定水平的情况。因此,在处理有形对象的难度水平高于预定水平的情况下,呈现控制部114可以将作为预定量的示例的与处理有形对象的“高”难度水平对应的量加到系统意图呈现的质量M2。与处理有形对象的“高”难度水平对应的量可以被预先登记。
替选地,处理有形对象的风险水平高于预定水平的情况的另一个示例被假设为有形对象的重要性水平高于预定水平的情况。因此,在有形对象的重要性水平高于预定水平的情况下,呈现控制部114可以将作为预定量的示例的与处理有形对象的“高”重要性水平对应的量加到系统意图呈现的质量M2。与处理有形对象的“高”重要性水平对应的量可以被预先登记。
图7是示出处理有形对象的风险水平高于预定水平的情况的示例的图。如图7所示,“脚底打滑”是风险指标之一。例如,作为处理有形对象的难度水平高于预定水平的情况的示例,在地板的摩擦系数小于或等于预定值的情况下,呈现控制部114可以将与“高”难度水平对应的预定量加到系统意图呈现的质量M2。注意,地板的摩擦系数可以从摄像装置图像等测量,或者可以被预先登记。
此外,如图7所示,“有形对象的稳定性”是风险指标之一。例如,作为处理有形对象的难度水平高于预定水平的情况的示例,在有形对象与地板之间的接触面积小于或等于预定值的情况下,呈现控制部114可以将与“高”难度水平对应的预定量加到系统意图呈现的质量M2。注意,有形对象与地板之间的接触面积可以从摄像装置图像等测量,或者可以被预先登记。
此外,如图7所示,“脆弱性”是风险指标之一。例如,作为有形对象的重要性水平高于预定水平的情况的示例,在有形对象被登记为需要小心处理的对象的情况下,呈现控制部114可以将与“高”重要性水平对应的预定量加到系统意图呈现的质量M2。注意,指示有形对象是否被登记为需要小心处理的有形对象的信息可以以与对象编号相链接的方式预先登记,或者可以通过使用从附着到有形对象的标签读取的对象编号作为密钥来获得。
此外,如图7所示,“有形对象的价值”是风险指标之一。例如,作为有形对象的重要性水平高于预定水平的情况的示例,在有形对象的稀有性或价格具有预定值或更大的情况下,呈现控制部114可以将与“高”重要性水平对应的预定量加到系统意图呈现的质量M2。注意,有形对象的稀有性或价格可以以与对象编号相链接的方式预先登记,或者可以通过使用从附着到有形对象的标签读取的对象编号作为密钥来获得。
上面已经详细描述了差G的计算。
(S14:差G与阈值Th之间的比较)
现在,将详细描述差G与阈值Th之间的比较。
如上所述,呈现控制部114确定计算的差G是否超过预定阈值Th。这里,阈值Th的具体数值不受限制。此外,阈值Th可以被预先登记。作为示例,阈值Th可以可选地由系统的提供者设置。
上面已经详细描述了差G与阈值Th之间的比较。
(S15:对用户的呈现信息的控制)
现在,参照图8至图15,将详细描述对用户的呈现信息的控制。如上所述,在计算的差G超过阈值Th的情况下,基于差G超过阈值Th,呈现控制部114控制呈现单元150向用户呈现预定信息。
例如,假设差G高于阈值Th1的情况。在这种情况下,通过增大感知质量M1来减少差G,因此,呈现控制部114只需要控制呈现单元150呈现用于增大感知质量M1的信息。
另一方面,还假设差G低于阈值Th2的情况。在这种情况下,通过减小感知质量M1来减少差G,因此,呈现控制部114仅需要控制呈现单元150呈现用于减小感知质量M1的信息。
注意,用于确定差G是否高于阈值Th1的阈值Th1可以与用于确定差G是否低于阈值Th2的阈值Th2的值相同或者不同。例如,用于确定差G是否高于阈值Th1的阈值Th1可以比用于确定差G是否低于阈值Th2的阈值Th2大。
首先,参照图8,将描述控制对用户的呈现信息的概要。图8是用于描述对用户的呈现信息的控制的概要的图。如图8所见,用于减小感知质量M1的信息的示例被描述在“减小”的列中,而用于增大感知质量M1的信息的示例被描述在“增大”的列中。
(大小的控制)
如图8中第二行所描绘的,作为示例,呈现控制部114可以通过减小由用户识别的有形对象的大小来减小感知质量M1。另一方面,呈现控制部114可以通过增大由用户识别的有形对象的大小来增大感知质量M1。以这样的方式,呈现控制部114可以通过改变由用户识别的有形对象的大小来增大或减小感知质量M1。注意,根据学术知识已经知道,有形对象的大小与感知质量M1之间存在相关性。
图9是用于描述改变有形对象的大小的示例的图。图9描绘了有形对象R11。这里,假设有形对象R11是真实对象的情况。基于差G超过阈值Th,呈现控制部114控制显示部152显示用于增大或减小由用户识别的有形对象的大小的对象。
这里,假设要增大感知质量M1的情况(即,使有形对象看起来很重的情况)。在这种情况下,只需要呈现控制部114控制显示部152显示用于增大由用户识别的有形对象的大小的对象。更具体地,在信息处理设备10包括摄像装置的情况下,呈现控制部114只需要基于摄像装置图像识别真实空间中有形对象R11的位置和颜色,并且在与真实空间相链接的全局坐标系中,在与有形对象R11相邻的位置(在图9中描绘的示例中与有形对象R11的上部相邻的位置)处放置具有与有形对象R11相同或相似的颜色的虚拟对象V11。通过这样做,用户可以在视觉上识别该有形对象,就像其大小增加了一样。
相比之下,还假设要减小感知质量M1的情况(即,使有形对象看起来很轻的情况)。在这种情况下,呈现控制部114只需要控制显示部152显示用于减小由用户识别的有形对象的大小的对象。更具体地,在信息处理设备10包括摄像装置的情况下,呈现控制部114只需要基于摄像装置图像识别在真实空间有形对象R11的位置和背景颜色,并且在与真实空间相链接的全局坐标系中,将具有背景颜色的虚拟对象放置在该有形对象R11的一部分区域中。通过这样做,用户可以在视觉上识别该有形对象,就像其大小减小了一样。
(材料的性质的控制)
参照回图8,将继续描述。如图8中第三行所描述的,作为示例,呈现控制部114可以通过向由用户识别的有形对象的材料提供光泽感来减小感知质量M1。另一方面,呈现控制部114可以通过向由用户识别的有形对象的材料提供哑光感来增大感知质量M1。以这样的方式,呈现控制部114可以通过修改由用户识别的有形对象的材料的性质来增大或减小感知质量M1。
(亮度的控制)
如图8中第四行所描绘的,作为示例,呈现控制部114可以通过增加由用户识别的有形对象的亮度来减小感知质量M1。另一方面,呈现控制部114可以通过降低由用户识别的有形对象的亮度来增大感知质量M1。以这种方式,呈现控制部114可以通过改变由用户识别的有形对象的亮度来增大或减小感知质量M1。注意,根据学术知识已经知道,有形对象的亮度与感知质量M1之间存在相关性。
图10是用于描述改变有形对象的亮度的示例的图。图10描绘了有形对象R11。这里,假设有形对象R11是真实对象的情况。基于差G超过阈值Th,呈现控制部114控制显示部152在用户的视野中在有形对象的至少部分区域中显示具有与有形对象的亮度不同的对象。
这里,假设要增大感知质量M1的情况(即,使感知质量M1看起来很重的情况)。在这样的情况下,呈现控制部114只需要控制显示部152在用户的视野中在有形对象的至少部分区域中显示具有比有形对象低的亮度的对象。更具体地,在信息处理设备10包括摄像装置的情况下,显示控制部114只需要基于摄像装置图像识别在真实空间中有形对象R11的位置和有形对象R11的亮度,并且在与真实空间相链接的全局坐标系中在有形对象R11的至少部分区域(在图10中描绘的示例中为有形对象R11的整个区域)中放置具有比有形对象R11的亮度低的虚拟对象V13。通过这样做,用户可以在视觉上识别该有形对象,如同其亮度降低了一样。
相比之下,还假设要减小感知质量M1的情况(即,使感知质量M1看起来很重的情况)。在这样的情况下,呈现控制部114只需要控制显示部152在用户的视野中在有形对象的至少部分区域中显示具有比有形对象的亮度高的对象。更具体地,在信息处理设备10包括摄像装置的情况下,显示控制部114只需要基于摄像装置图像识别在真实空间中有形对象R11的位置和有形对象R11的亮度,并且在与真实空间相链接的全局坐标系中在有形对象R11的至少部分区域(在图10中描绘的示例中为有形对象R11的整个区域)中放置具有比有形对象R11的亮度高的虚拟对象V12。通过这一点,用户可以在视觉上识别该有形对象,就像其亮度增加一样。
(运动的控制)
参照回图8,将继续描述。如图8中第五行所描绘的,作为示例,呈现控制部114可以通过先行移动被显示对象或者增加该对象的反弹系数(rebound coefficient)(反弹程度)来减小感知质量M1。另一方面,呈现控制部114可以通过以迟缓方式移动被显示对象或者减小该对象的反弹系数(反弹程度)来增大感知质量M1。
以这样的方式,呈现控制部114可以通过控制由用户识别的对象的运动来增大或减小感知质量M1。注意,根据学术知识已经知道,在有形对象的行进距离与感知质量M1之间存在相关性。
图11是用于描述控制对象的运动的示例的图。呈现控制部114控制显示部152以显示根据差G移动的对象,这里,对象的运动可以包括以下中至少之一:以与差G对应的速度行进的运动;和基于与差G对应的反弹程度的反弹运动。
例如,呈现控制部114只需要控制显示部152显示以与差G对应的速度移动的对象。更具体地,呈现控制部114只需要控制显示部152显示以随差G的增加而减小的速度移动(或先行移动)的虚拟对象V15。替选地,呈现控制部114可以控制显示部152显示反弹程度随着差G的增加而减小的虚拟对象V15。如图11中所描绘的,虚拟对象V15的运动可以是在虚拟对象V16上滑下的运动。
相比之下,呈现控制部114只需要控制显示部152显示以随着差G的减小而增加的速度移动(或者以迟缓的方式移动)的虚拟对象V14。替选地,呈现控制部114可以控制显示部152显示反弹程度随着差G的减小而增加的虚拟对象V14。如图11所描绘的,虚拟对象V14的运动可以是在虚拟对象V16上滑下的运动。
(另一个人的运动)
参照回图8,将继续描述。如图8中第六行所描绘的,作为示例,呈现控制部114可以通过控制显示部152显示举起轻的对象的另一个人(对象)来减小感知质量M1。另一方面,呈现控制部114可以通过控制显示部152显示举起重的对象的另一个人(对象)来增大感知质量M1。以这种方式,用户可以通过观察另一个人的行为来调整感知质量M1。
图12是用于描述控制另一个人的运动的示例的图。基于差G超过阈值Th,呈现控制部114控制显示部152显示描绘与有形对象相关联的运动的视频。这里,与有形对象相关联的运动可以是以下主体的运动:该主体与用户不同并且以使得有形对象看起来轻或重的方式持有有形对象。
这里,假设要增大感知质量M1的情况(即,使有形对象看起来很重的情况)。在这样的情况下,呈现控制部114只需要控制显示部152显示以使得有形对象看起来很重的方式持有有形对象的虚拟对象V22。相比之下,还假设要减小感知质量M1(即,有形对象看起来很轻的情况)的情况。在这种情况下,呈现控制部114只需要控制显示部152显示以使有形对象看起来很轻的方式持有有形对象的虚拟对象V21。
注意,在图12中示出的示例中,由显示部152显示的虚拟对象是机器人的视频,但是虚拟对象不限于机器人的视频。例如,虚拟对象可以是人类等的视频。替选地,可以用真实对象来代替虚拟对象。此时,在要增大感知质量M1的情况下,呈现控制部114只需控制有形对象,使得真实对象持有有形对象好像有形对象很重一样。相比之下,在要减小感知质量M1的情况下,呈现控制部114只需要控制真实对象,使得真实对象持有有形对象好像有形对象很轻一样。作为示例,有形对象可以是机器人。
在呈现控制部114控制机器人的情况下,机器人可以将有形对象(例如,包裹)直接递送给用户(机器人与人之间的合作操作)。注意,如上所述,人感知的质量的特征在于,感知质量可以通过观察另一个人举起有形对象的行为来调整。然而,在机器人的致动器扭矩明显超过人的扭矩的情况下,例如,即使用户观察到机器人举起有形对象的姿势的变化,用户也无法充分确定有形对象的质量。因此,无法适当地调整感知质量M1。
那么,在感知质量M1未被适当调整的情况下,用户无法适当地举起有形对象,并且可能遭受严重的身体障碍。因此,机器人最好模仿与有形对象被递送给的用户的扭矩相当的举起扭矩对应的姿势。因此,用户通过观察机器人的姿势更适当地调整感知质量M1。此外,对感知质量M1的适当调整使得能够减少用户遭受严重身体障碍的可能性。
更具体地,呈现控制部114确定处理有形对象的用户的姿势变化趋势y与有形对象质量x之间的相关函数y=f(x)。然后,呈现控制部114将在拾取包裹时登记的包裹重量x'代入相关函数y=f(x)中的x,以确定姿势变化趋势y'。注意,在有形对象的重要性水平高于预定水平的情况下,呈现控制部114将通过向包裹重量x'添加预定重量而获得的值代入相关函数y=f(x)中的x。
呈现控制部114将姿势变化趋势y'输入到机器人的姿势控制部。因此,当向用户递送包裹时,机器人根据输入到其姿势控制部的姿势变化趋势y'进行操作。当机器人向用户递送包裹时,用户观察机器人的姿势变化以适当地调整感知质量M1。
(其他控制)
除上述技术外,还可以采用增大感知质量M1的技术。作为示例,基于差G超过阈值Th,呈现控制部114可以控制显示部152在用户视野中与有形对象的区域对应的预定位置处显示预定对象。例如,假设在有形对象是包裹的情况下,提示用户稳定地举起有形对象。在这样的情况下,显示部152可以被控制为在有形对象的下半部的任何位置处显示作为对象的示例的手图标。
图13是用于描述用于增大感知质量M1的技术的第一修改例的图。图13描绘了有形对象R12。这里,有形对象R12被假设为真实对象。在要增大感知质量M1的情况(即,使有形对象看起来很重的情况)下,呈现控制部114可以基于摄像装置图像识别有形对象R12的区域在真实空间中的位置,并且控制显示部152在与真实空间相链接的全局坐标系中在有形对象R12的下半部的任何位置处显示虚拟对象V23。注意,在图13中示出的示例中,虚拟对象V23是手图标,但是虚拟对象V23可以是手图标以外的任何图标。
图14是用于描述增大感知质量M1的技术的第二修改例的图。图14描述了有形对象R13。这里,有形对象R13被假设为真实对象。在要增大感知质量M1的情况(即,使有形对象看起来很重的情况)下,呈现控制部114只需要基于摄像装置图像识别真实空间中有形对象R13的位置和颜色,并且将具有与有形对象R13的颜色相同或相似的颜色并且具有不稳定形状的虚拟对象V24放置在与真实空间相链接的全球坐标系中与有形对象R13相邻的位置(在图14中描绘的示例中为与有形对象R13的上部相邻的位置)处。
这使得可以提示用户稳定地举起有形对象,因此,预计可以进一步增大感知质量M1。注意,作为示例,不稳定的形状可以像虚拟对象V24那样具有从下到上增加的厚度,但是不稳定的形状不限于这样的示例。
替选地,基于差G超过阈值Th,呈现控制部114可以控制显示部152呈现预定文本。该预定文本可以是指示有形对象很重的信息(或者指示有形对象很轻的信息)。替选地,基于差G超过阈值Th,显示控制部114可以控制声音输出部154呈现预定声音。同样地,预定声音可以是指示有形对象很重的信息(或者指示有形对象很轻的信息)。替选地,基于差G超过阈值Th,呈现控制部114可以控制力呈现部156向用户呈现预定力。
(各种参数的调整)
如上所述,可以通过改变由用户识别的各种参数(例如,有形对象的大小、有形对象的亮度等)来增大或减小感知质量M1。这里,有形对象的参数与感知质量M1之间的相关性可以表示为相关函数。因此,通过预先确定指示有形对象的参数与感知质量M1之间的相关性的相关函数,呈现控制部114可以基于相关函数和差G来调整有形对象的参数。这里,作为示例,将描述用于调整有形对象的大小的技术。
图15是示出有形对象的感知质量M1与对象大小S之间的相关函数的示例的图。如图15所描绘的,对于多个不同的有形对象中的每一个,呈现控制部114在存储单元140中预先积累感知质量M1与有形对象大小S之间的对应关系作为积累的数据,并且基于积累的数据来确定感知质量M1与有形对象大小S之间的相关函数S=f(M1)。因此,呈现控制部114可以通过将差G代入预先确定的相关函数S=f(M1)的M1来计算有形对象大小S的增大或减小的量。
上面已经描述了根据本公开内容的实施方式的信息处理设备10的功能细节。
<2.第一修改例>
现在,将详细描述本公开内容的实施方式的第一修改例。在本公开内容的实施方式的第一修改例中,由用户处理的有形对象是虚拟对象。
图16是用于描述本公开内容的实施方式的第一修改例的图。参照图16,在第一修改例中,用户也佩戴了信息处理设备10。此外,同样在第一修改例中,信息处理设备10主要被假设为佩戴在用户身上的AR装置。然而,如上所述,信息处理设备10不限于AR装置。
信息处理设备10正在执行应用。这里,应用被假设为游戏应用。然而,应用不限于特定类型。作为由显示部152显示的有形对象的示例的虚拟对象随着应用的进展而被控制。在视觉上识别作为有形对象的示例的虚拟对象时,用户操作控制器R20和控制器R30以控制应用的进展。
在图16中示出的示例中,设置了两个控制器。然而,可以设置一个或三个或更多个控制器。此外,在图16中示出的示例中,控制器R20包括末端部分R22和握持部分R23。然而,控制器R20的配置不限于特定的一种配置。同样地,在图16所示的示例中,控制器R30包括末端部分R32和握持部分R33。然而,控制器R30的配置不限于特定的一种配置。
由信息处理设备10识别控制器R20和R30中的每一个的位置。例如,基于摄像装置图像识别控制器R20和R30中的每一个的位置。然而,以任何方式识别控制器R20和R30中的每一个的位置。控制器R20和R30中的每一个的质量被预先登记在系统中。此外,虚拟对象的质量被预先登记作为系统意图呈现的质量M2。
在此,由显示部152显示的虚拟对象(例如,剑、枪等)随着应用的进展而被控制。例如,虚拟对象可以被显示在与控制器R20或R30的位置对应的位置处。然而,在用户感知到的虚拟对象的质量M1与其位置对应于被显示的虚拟对象的位置的控制器R20或R30的质量不匹配的情况下,用户感到处理感受不匹配(认知负荷)。
因此,在第一修改例中,估计部112通过使用类似于用于估计被用户感知的真实对象的质量M1的技术,估计被用户感知的虚拟对象的质量M1。然后,呈现控制部114计算系统意图呈现的质量M2(即,虚拟对象的质量)与用户感知的虚拟对象的质量M1之间的差G。
如上所述,在差G高于阈值Th1的情况下,呈现控制部114可以增大感知质量M1。此外,在差G低于阈值Th2的情况下,呈现控制部114可以减小感知质量M1。这消除了系统意图呈现的质量M2与感知质量M1之间的差,使得能够更有效地利用施加到用户的与虚拟对象相关的力来减少施加到用户的负荷。
替选地,呈现控制部114可以增大或减小感知质量M1,使得用户感知的虚拟对象的质量M1更接近于其位置与被显示的虚拟对象的位置对应的控制器R20或R30的质量。这可以减少给用户的处理感受(认知负荷)之间的不匹配感。在这种情况下,增大或减小感知质量M1的技术可以类似于增大或减小感知质量M1以消除系统意图呈现的质量M2与感知质量M1之间的差的技术。
注意,虚拟对象也被假设为随着应用的进展而动态地改变。因此,呈现控制部114可以根据虚拟对象的动态变化来增大或减小虚拟对象的感知质量。
图17是用于描述虚拟对象随着应用的进展而动态变化的第一示例的图。图17描绘了控制器R20。此外,在与控制器R20的位置对应的位置处显示虚拟对象V31。在这种情况下,系统意图呈现的质量M2(即虚拟对象V31的质量)与用户感知的虚拟对象V31的质量M1之间的差G高于阈值Th1,因此,呈现控制部114增大感知质量M1(虚拟对象V31的亮度降低)。
现在,假设如下情况:虚拟对象V31的一部分(图17中的锤子部分)随着应用的进展而脱落。在这种情况下,已脱落的虚拟对象V33和剩余的虚拟对象V32均比原来的虚拟对象V31轻。相应地,呈现控制部114减小已脱落的虚拟对象V33和剩余的虚拟对象V32中的每一个的感知质量(虚拟对象V33和V32中的每一个的亮度增加)。
图18是用于描述第二示例的图,在第二示例中,虚拟对象随着应用的进展而动态变化。图18描绘了末端部分R32。此外,虚拟对象V34被显示在与末端部分R32的位置对应的位置处。在这种情况下,系统意图呈现的质量M2(即,虚拟对象V31的质量)与用户感知的虚拟对象V34的质量M1之间的差G低于阈值Th2,因此,呈现控制部114减小感知质量M1(虚拟对象V34的亮度增加)。
现在,虚拟对象V34被假设为随着应用的进展而变得更强。例如,虚拟对象V34是敌方角色,并且随着持久力的增加(由于击败敌方角色的难度增加)而变得更强。在这种情况下,虚拟对象V34最好被做成看起来比原来的虚拟对象V34更重。相应地,呈现控制部114增加虚拟对象V34的感知质量(虚拟对象V34的亮度降低)。
上面已经详细描述了本公开内容的实施方式的第一修改例。
<3.第二修改例>
现在,将详细描述本公开内容的实施方式的第二修改例。在本公开内容的实施方式的第二修改例中,由用户处理的有形对象是如第一修改例中的虚拟对象。
图19是用于描述第二修改例的图。参照图19,同样在第二修改例中,用户佩戴信息处理设备10。此外,同样在第二修改例中,信息处理设备10主要被假设为佩戴在用户身上的AR装置。然而,如上所述,信息处理设备10不限于AR装置。
信息处理设备10正在执行应用。这里,应用被假设为游戏应用。然而,该应用不限于特定类型。作为由显示部152显示的有形对象的示例的虚拟对象随着应用的进展而被控制。在视觉上识别作为有形对象的示例的虚拟对象的同时,用户操作力呈现部156以控制应用的进展。
另外,在第二修改例中,与第一修改例的情况一样,虚拟对象的质量被预先登记作为系统意图呈现的质量M2。此外,在第二修改例中,力呈现部156向用户施加与虚拟对象的质量对应的力(力反馈)。
然而,在用户感知到的虚拟对象的质量M1与力呈现部156向用户施加的与虚拟对象的质量对应的力不匹配的情况下,用户感到处理感受之间的不匹配感(认知负荷)。
因此,在第二修改例中,估计部112通过使用类似于用于估计被用户感知的真实对象的质量M1的技术,估计被用户感知的虚拟对象的质量M1。然后,呈现控制部114计算系统意图呈现的质量M2(即,虚拟对象的质量)与用户感知的虚拟对象的质量M1之间的差G。
如上所述,在差G高于阈值Th1的情况下,呈现控制部114可以增大感知质量M1。此外,如上所述,在差G低于阈值Th2的情况下,呈现控制部114可减小感知质量M1。这消除了系统意图呈现的质量M2与感知质量M1之间的差,使得能够利用施加到用户的与虚拟对象相关的力更有效地减少施加到用户的负荷。
替选地,在第二修改例中,呈现控制部114可以基于差G来调整系统意图呈现的质量M2,并且控制力呈现部156向用户施加与经调整的“系统意图呈现的质量M2”对应的力。
更具体地,在差G高于阈值Th1的情况下,呈现控制部114可以减小系统意图呈现的质量M2。此外,在差G低于阈值Th2的情况下,呈现控制部114可以增加系统意图呈现的质量M2。这消除了系统意图呈现的质量M2与感知质量M1之间的差,使得能够利用施加到用户的与虚拟对象相关的力更有效地减少施加到用户的负荷。
然而,还假设了如下情况:经调整的“系统意图呈现的质量M2”高于预定上限(即,可由力呈现部156呈现的力的上限)。在这种情况下,力呈现部156可能无法呈现与经调整的“系统意图呈现的质量M2”对应的力。结果,系统意图呈现的质量M2与感知质量M1之间的差可能无法被消除。
因此,在经调整的“系统意图呈现的质量M2”高于预定上限的情况下,呈现控制部114只需要控制力呈现部156向用户施加与上限对应的力。此外,呈现控制部114只需要控制显示部152显示与经调整的“系统意图呈现的质量M2”超过上限的量对应的对象。
作为示例,呈现控制部114可以通过如下方式减小由用户识别的有形对象的大小:将感知质量M1减少经调整的“系统意图呈现的质量M2”超过上限的量。替选地,呈现控制部114可以通过如下方式增加由用户识别的有形对象的亮度:将感知质量M1减少经调整的“系统意图呈现的质量M2”超过上限的量。对于用于减少用户识别的有形对象的大小的技术和用于增加用户识别的有形对象的亮度的技术,可以使用上述的技术。
上面已经详细描述了本公开内容的实施方式的第二修改例。
<4.第三修改例>
现在,将详细描述本公开内容的实施方式的第三修改例。
现在,将详细描述本公开内容的实施方式的第三修改例。在上述描述中,主要假设有形对象作为真实对象被用户的手处理(例如,有形对象被举起)的情况。然而,在用户可以处理虚拟对象的情况下,由用户处理的虚拟对象可以远程控制有形对象。
图20是用于描述第三修改例的图。图20描绘了可以由用户处理的虚拟对象V40。这里,虚拟对象V40具有手的形状。然而,虚拟对象V40的形状不限于特定的形状。此外,还显示了虚拟对象V41。
通过处理虚拟对象V40,用户可以使虚拟对象V40举起虚拟对象V41。在这种情况下,如上所述,呈现控制部114可以基于由估计部112估计的感知质量M1和系统意图呈现的质量M2来控制呈现给用户的信息。
上面已经详细描述了本公开内容的实施方式的第三修改例。
<5.硬件配置示例>
现在,参照图21,将描述作为根据本公开内容的实施方式的信息处理设备10的示例的信息处理设备900的硬件配置示例。图21是描绘信息处理设备900的硬件配置示例的框图。注意,信息处理设备10不一定包括图21中描绘的整个硬件配置,并且图21中描绘的硬件配置的一部分不一定被包括在信息处理设备10中。
如图21所描绘的,信息处理设备900包括CPU(中央处理单元)901、ROM(只读存储器)903和RAM(随机存取存储器)905。此外,信息处理设备900可以包括主机总线907、桥接器909、外部总线911、接口913、输入装置915、输出装置917、存储装置919、驱动器921、连接端口923和通信装置925。取代CPU 901或者除了CPU 901之外,信息处理设备900可以包括被称为DSP(数字信号处理器)或ASIC(特定应用集成电路)的处理电路。
CPU 901充当算术处理装置和控制装置,并且根据记录在ROM 903、RAM 905、存储装置919或者可移动记录介质927中的各种程序来控制信息处理设备900的一般操作或其部分操作。ROM 903存储由CPU 901使用的程序、算术参数等。RAM 905临时存储用于由CPU 901执行的程序、在执行期间适当改变的参数等。CPU 901、ROM 903和RAM 905通过主机总线907连接在一起,该主机总线包括内部总线,如CPU总线。此外,主机总线907经由桥接器909连接到外部总线911,例如PCI(外围部件互连/接口)总线。
输入装置是由用户操作的装置,例如,按钮等。输入装置915可以包括鼠标、键盘、触摸面板、开关、控制杆等。此外,输入装置915可以包括检测用户的语音的麦克风。输入装置915可以是使用红外线或任何其他无线电波的遥控装置,或者可以是外部连接装置929,例如与信息处理设备900的操作兼容的移动电话。输入装置915包括输入控制电路,该控制电路基于用户输入的信息生成输入信号,并且将输入信号输出到CPU 901。用户操作输入装置915,以向信息处理设备900输入各种类型的数据,并且向信息处理设备900给出关于处理操作的指令。此外,后面描述的成像装置933也可以通过捕获用户手部运动的图像、用户手指的图像等充当输入装置。在这种情况下,可以根据手的运动或手指的取向来确定指向的位置。
输出装置917包括可以在视觉上或听觉上将获取的信息通知给用户的装置。输出装置917可以是诸如LCD(液晶显示器)或有机EL(电致发光)显示器的显示装置、诸如扬声器和耳机的声音输出装置,等等。此外,输出装置917可以包括PDP(等离子体显示板)、投影仪、全息图、打印机装置,等等。输出装置917输出由信息处理设备900执行的处理结果,作为文本或诸如图像的视频,或者作为诸如语音或声学的声音。此外,输出装置917可以包括用于照亮周围环境的灯等。
存储装置919是用于数据存储的装置,存储装置919被配置成信息处理设备900的存储单元的示例。存储装置919包括例如诸如HDD(硬盘驱动器)的磁存储装置、半导体存储装置、光学存储装置或磁光存储装置。存储装置919存储要由CPU 901执行的程序、各种类型的数据、从外部获取的各种类型的数据等。
驱动器921是可移动记录介质927的读/写器,可移动记录介质927例如磁盘、光盘、磁光盘或半导体存储器,并且被内置到信息处理设备900中或者外部附接到信息处理设备900。驱动器921读取记录在所附接的可移动记录介质927中的信息,并且将信息输出到RAM905中。此外,驱动器921将记录写入所附接的可移动记录介质927中。
连接端口923是用于将设备直接连接到信息处理设备900的端口。连接端口923可以是例如USB(通用串行总线)端口、IEEE 1394端口、SCSI(小型计算机系统接口)端口等。替选地,连接端口923可以是RS-232C端口、光学音频端子、HDMI(注册商标)(高清晰度多媒体接口)端口等。随着外部连接装置929连接到连接端口923,各种类型的数据可以在信息处理设备900与外部连接装置929之间交换。
通信装置925是例如包括用于连接到网络931的通信装置的通信接口。通信装置925可以是例如用于有线或无线LAN(局域网)、蓝牙(注册商标)或WUSB(无线USB)的通信卡。此外,通信装置925可以是用于光通信的路由器、用于ADSL(非对称数字用户线)的路由器、用于各种通信的调制解调器等。例如,通信装置925通过使用预先确定的协议如TCP/IP,向互联网和其他通信装置发送信号以及从互联网和其他通信装置接收信号等。此外,连接到通信装置925的网络931是以有线或无线方式连接的网络,例如,互联网、家庭LAN、红外通信、无线电波通信、卫星通信等。
<6.结论>
根据本公开内容的实施方式,提供了信息处理设备10,信息处理设备10包括:估计部112,其被配置成基于用户的状态,估计由用户关于施加到用户的与有形对象相关的力预测的第一量;以及呈现控制部114,其被配置成基于第一量以及关于所述力预先登记的第二量,控制呈现给用户的信息。
根据这样的配置,提供了如下技术,该技术能够利用施加到用户的与有形对象相关的力有效地减少施加到用户的负荷。
上面已经参照附图对优选实施方式进行了详细描述。然而,本公开内容的技术范围不限于这样的示例。显然,具有本公开内容的技术领域中的普通知识的人可以容易地在所附权利要求的精神和范围内设计出各种变化或修改,并且这些变化和修改被理解为合理地属于本公开内容的技术范围。
此外,本文中描述的效果只是信息性或说明性的,而不是限制性的。换言之,除了上述描述的效果以外或者代替上述描述的效果,根据本公开内容的技术可以产生本领域技术人员根据本文中的描述明显的其他效果。
注意,本公开内容的技术范围还涵盖以下配置。
(1)一种信息处理设备,包括:
控制单元,其被配置成:
基于用户的状态,估计由所述用户关于施加到所述用户的与有形对象相关的力预测的第一量,以及
基于所述第一量以及关于所述力预先登记的第二量,控制向所述用户的信息呈现。
(2)根据以上(1)所述的信息处理设备,其中,
所述控制单元基于根据所述第二量和所述第一量计算的差来控制向所述用户的信息呈现。
(3)根据以上(2)所述的信息处理设备,其中,
所述控制单元基于所述差超过预定阈值来执行控制,以向所述用户呈现预定信息。
(4)根据以上(3)所述的信息处理设备,其中,
所述控制单元基于所述差超过所述阈值来执行控制以显示用于增大或减小由所述用户识别的所述有形对象的大小的对象。
(5)根据以上(3)所述的信息处理设备,其中,
所述控制单元基于所述差超过所述阈值来执行控制,以在所述用户的视野中在所述有形对象的至少部分区域中显示亮度与所述有形对象的亮度不同的对象。
(6)根据以上(3)所述的信息处理设备,其中,
所述控制单元基于所述差超过所述阈值来执行控制,以显示描绘与所述有形对象相关联的运动的视频。
(7)根据以上(6)所述的信息处理设备,其中,
与所述有形对象相关联的运动是与所述用户不同的主体以使得所述有形对象看起来轻的方式持有所述有形对象的运动或者是所述主体以使得所述有形对象看起来重的方式持有所述有形对象的运动。
(8)根据以上(3)所述的信息处理设备,其中,
所述控制单元基于所述差超过所述阈值来执行控制,以在所述用户的视野中与所述有形对象的区域对应的预定位置处显示预定对象。
(9)根据以上(3)所述的信息处理设备,其中,
所述控制单元基于所述差超过所述阈值来执行控制,以呈现预定文本和预定声音中的至少一者。
(10)根据以上(2)所述的信息处理设备,其中,
所述控制单元执行控制,以显示具有与所述差对应的运动的对象。
(11)根据以上(10)所述的信息处理设备,其中,
所述运动包括以下运动中的至少一者:以与所述差对应的速度行进的运动;以及以与所述差对应的反弹程度进行反弹的运动。
(12)根据以上(2)所述的信息处理设备,其中,
所述控制单元基于所述差调整所述第二量,并且执行控制以向所述用户提供与经调整的第二量对应的力。
(13)根据以上(12)所述的信息处理设备,其中,
在所述经调整的第二量在预定的上限以上的情况下,所述控制单元执行控制以向所述用户提供与所述上限对应的力,并且执行控制以显示与所述经调整的第二量超过所述上限的量对应的对象。
(14)根据以上(2)至(13)中任一项所述的信息处理设备,其中,
所述控制单元基于从所述第二量中减去所述第一量来计算所述差。
(15)根据以上(14)所述的信息处理设备,其中,
所述控制单元基于从所述第二量中减去所述第一量来计算所述差,其中所述第二量中加上了与处理所述有形对象的难度水平对应的量或者与所述有形对象的重要性水平对应的量。
(16)根据以上(1)至(15)中任一项所述的信息处理设备,其中,
所述第一量是由所述用户对所述力的大小或者所述有形对象的质量预测的量,并且
所述第二量是预先登记的所述力的大小或者预先登记的所述有形对象的质量。
(17)根据以上(1)至(16)中任一项所述的信息处理设备,其中,
所述用户的状态包括关于所述用户的姿势信息。
(18)根据以上(1)至(17)中任一项所述的信息处理设备,其中,
所述有形对象是真实对象或虚拟对象。
(19)一种信息处理方法,包括:
由处理器基于用户的状态来估计由所述用户关于施加到所述用户的与有形对象相关的力预测的第一量,以及
由所述处理器基于所述第一量以及关于所述力预先登记的第二量来控制向所述用户的信息呈现。
(20)一种程序,使计算机用作:
信息处理设备,其包括:
控制单元,其被配置成:
基于用户的状态,估计由所述用户关于施加到所述用户的与有形对象相关的力预测的第一量,以及
基于所述第一量以及关于所述力预先登记的第二量,控制向所述用户的信息呈现。
[附图标记列表]
1:信息处理系统
10:信息处理设备
110控制单元
112:估计部
114:呈现控制部
120:控制单元
130:操作单元
140:存储单元
150:呈现单元
152:显示部
154:声音输出部
156:力呈现部
20:传感器单元
- 信息处理设备、信息处理方法、程序和医疗观察系统
- 信息处理设备,信息处理方法及程序
- 信息处理方法、信息处理装置和信息处理程序
- 信息处理方法、信息处理装置以及信息处理程序
- 信息处理设备、信息处理系统和信息处理方法
- 信息处理服务器、信息处理方法、信息处理程序、记录了信息处理程序的记录介质、便携终端、便携式计算机的信息处理方法、便携终端用程序、以及记录了便携终端用程序的记录介质
- 信息处理系统、信息处理方法、信息处理程序、记录信息处理程序的计算机可读记录介质以及信息处理设备