用于在交通路口处运行驾驶功能的车辆引导系统和方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及一种用于在交通路口处运行车辆的驾驶功能的车辆引导系统和相应的方法。
背景技术
车辆可以具有辅助车辆驾驶员引导车辆、特别是纵向引导和/或横向引导车辆的一个或多个驾驶功能。用于辅助车辆纵向引导的示例性驾驶功能为自适应巡航控制(ACC)功能,其可以用于以所定义的设定行驶速度或目标行驶速度和/或以所定义的与在车辆前方行驶的前车的目标距离来纵向引导车辆。在此,驾驶功能也可以结合交通路口(例如十字路口)处的信号单元(特别是交通灯)使用,以便引起在信号单元处的自动纵向引导,例如自动减速。
信号单元可以具有不同的信号发生器,这些信号发生器例如被分配给交通路口处的不同的驾驶方向。在所述驾驶功能的范畴中,应当仅考虑与车辆的驾驶员规划的驾驶方向或与车辆的驾驶员规划的驾驶操纵相关的一个或多个信号发生器。
发明内容
本文涉及的技术目的在于:以有效且可靠的方式识别车辆的驾驶员在前方路口处的驾驶意图,特别是为了提高驾驶功能在路口处的自动纵向引导的品质。
该目的通过每个独立权利要求来实现。尤其在从属权利要求中说明了有利的实施方式。应指出的是,从属于独立权利要求的从属权利要求的附加特征在没有独立权利要求的特征或者仅在与独立权利要求的特征子集相组合的情况下可以构成独立于独立权利要求的所有特征组合的单独发明,其可以成为独立权利要求、分案申请或后续申请的主题。这同样适用于说明书中描述的可以形成独立于独立权利要求的特征的发明的技术教导。
根据一个方面,描述了一种车辆引导系统,用于运行驾驶功能以在交通路口或街道路口(特别是十字路口)处自动地纵向和/或横向引导机动车辆。驾驶功能可以被设计为使车辆在路口的信号单元的停止线处自动制动(如果信号单元的与车辆相关的信号发生器为“红色”)和/或自动地纵向引导车辆经过路口(如果与车辆相关的信号发生器为“绿色”)。在此,自动纵向引导可以通过距离和/或速度控制器来进行。
车辆引导系统被设置为确定所位于的通往路口的入口的车道。通往路口的入口可以具有多个不同的车道。车道的数量可以通过关于路口的地图数据(即,通过数字地图)来指示。地图数据还可以指示通往路口的入口的各个车道的空间走向。地图数据还可以指示关于在通往路口的入口上的信号单元(特别是交通信号设施)的信息。
车辆所位于的车道可以基于全球导航卫星系统(GNSS)的位置数据来确定。替代地或附加地,可以基于路口的环境中一个或多个地标(例如车道标记、信号单元、交通标志牌、柱子等)来确定车辆所位于的车道。
如上所述,地图数据可以指示车辆所行驶的通往路口的入口的不同车道的走向。然后,可以基于地图数据、特别是基于所指示的车道走向,以特别精确且可靠的方式确定车辆所位于的车道。
车辆引导系统可以被设置为确定关于车辆相对于车辆所行驶的通往路口的入口的车道的位置的位置数据。特别地,位置数据可以被确定为:基于地图数据中指示的一个或多个地标的位置,特别是一个或多个车道标记、柱子、标志牌和/或信号发生器的位置;基于车辆在一个或多个相继时间点与一个或多个地标的相对位置;基于利用GNSS接收器在一个或多个相继时间点确定的车辆的全球位置;和/或基于借助车轮转数传感器、加速度传感器和/或偏航率传感器和/或用于确定车辆的视觉里程计的传感器所确定的车辆在两个或更多个时间点之间的位置变化和/或方位变化。然后,可以基于所确定的位置数据以特别精确的方式确定车辆所位于的车道。
替代地或附加地,地图数据可以指示路口处和/或路口的环境中的不同地标的相对布置。换句话说,地图数据可以指示不同的地标相对于彼此如何在空间上布置。该信息可以称为基于地图的相对布置。
车辆引导系统可以被设置为基于来自车辆的一个或多个环境传感器(特别是来自一个或多个摄像机)的环境数据来确定不同地标的基于传感器的相对布置。换句话说,可以基于环境数据来确定不同地标相对于彼此如何在空间上布置。
然后,可以基于该基于地图的布置以及基于该基于传感器的布置以特别精确且可靠的方式确定车辆所位于的车道。特别地,可以将基于传感器的布置与基于地图的布置进行比较,以允许相对于基于地图的布置来定位车辆。
特别地,车辆引导系统可以被设置为(例如基于环境数据)确定车辆与基于地图的布置的相对位置,以及确定车辆与基于传感器的布置的相对位置。然后,可以基于所确定的车辆与基于地图的布置的相对位置和车辆与基于传感器的布置的相对位置,以精确的方式确定车辆所位于的车道。
车辆引导系统还被设置为基于所确定的车道来确定路口的信号单元的至少一个信号发生器对于车辆在路口处的(预期的和/或预测的)驾驶操纵是否相关。替代地或附加地,车辆引导系统可以被设置为基于所确定的车道来确定路口的(在入口的)信号单元的对于车辆在路口处的(预期的和/或预测的)驾驶操纵相关的至少一个(必要时多个)信号发生器。信号单元可以具有多个不同的信号发生器,这些信号发生器可以与路口处的多个不同的可能的驾驶操纵相关。示例性的可能的驾驶操纵是:左转操纵;直线行驶操纵;右转操纵;和/或U形转弯操纵。可能的驾驶操纵和不同信号发生器之间的关联可以在关于路口的地图数据中指示。特别地,地图数据可以指示信号单元的各个信号发生器的相对(空间)布置。地图数据还可以针对每个单独的信号发生器指示相应的信号发生器与哪个驾驶操纵和/或与哪个车道相关。
因此,可以在地图数据中指示不同信号发生器的不同位置,特别是相对布置。车辆引导系统可以被设置为确定与车辆在路口处的(预期的和/或预测的)驾驶操纵相关的信号发生器的位置。另外,车辆引导系统可以被设置为基于来自地图数据的位置和/或相对布置在环境数据中识别出相关的信号发生器。
此外,车辆引导系统可以被设置为确定所确定的信号发生器的信号状态。信号发生器的信号状态(特别是颜色)可以基于来自车辆的一个或多个环境传感器的环境数据来确定。
车辆引导系统还被设置为根据至少一个信号发生器对于车辆在路口处的驾驶操纵是否相关和/或根据所确定的信号发生器来运行在路口处的驾驶功能。驾驶功能可以在路口处特别是根据所确定的信号发生器的所确定的信号状态(例如颜色)来运行。
特别地,车辆引导系统可以被设置为根据所确定的信号发生器的信号状态(和/或根据信号发生器对于车辆在路口处的驾驶操纵是否相关),自动地纵向和/或横向引导车辆经过路口(例如如果识别出信号发生器为“绿色”),或使车辆自动地减速停止在信号单元的停止线前(例如如果识别出信号发生器为“红色”)。
通过在运行驾驶功能时考虑车道,可以以可靠的方式识别出车辆的驾驶员的驾驶意图,并且可以进一步提高驾驶功能的可用性和品质。
车辆引导系统可以被设置为基于所确定的车道来预测车辆将在路口处执行的驾驶操纵。地图数据可以例如指示对于通往路口的入口的车道(例如右转车道、左转车道、直行车道、U形转弯车道等)具有的、允许的和/或可能的一个或多个驾驶操纵。因此,可以基于地图数据来确定与车道相关联的车辆的驾驶操纵。在此,驾驶操纵特别是可以从多个可能的驾驶操纵中选择。然后,可以基于预测的驾驶操纵以特别精确的方式确定与驾驶操纵相关的信号发生器。
如上所述,地图数据可以指示信号单元的不同信号发生器与路口处不同可能驾驶操纵和/或与通往路口的入口的不同车道的关联。然后,可以基于地图数据、特别是基于地图数据中指示的关联,以特别可靠的方式确定与车辆在路口处的驾驶操纵相关的信号发生器。
车辆引导系统可以被设置为基于来自车辆的一个或多个环境传感器的环境数据来确定路口的基于传感器的环境模型。此外,地图数据可以指示路口的基于地图的环境模型。在环境模型中可以指示在路口的环境中的相应的地标。然后,可以基于该基于传感器的环境模型并且基于该基于地图的环境模型,特别是基于该基于传感器的环境模型与该基于地图的环境模型的比较,确定车辆所位于的车道和/或确定与车辆在路口处的驾驶操纵相关的信号发生器。通过比较基于传感器的环境模型和基于地图的环境模型,可以进一步提高驾驶功能的品质。
根据另一方面,描述了一种(道路)机动车辆(特别是乘用车或载重车或公共汽车或摩托车),其包括本文中描述的车辆引导系统。
根据另一方面,描述了一种用于运行驾驶功能以在路口处自动地纵向和/或横向引导机动车辆的方法。该方法包括确定车辆所位于的通往路口的入口的车道。该方法还包括基于所确定的车道来确定路口的信号单元的与车辆在路口处的驾驶操纵相关的信号发生器(或者信号单元的信号发生器对于车辆的驾驶操纵是否相关)。该方法还包括根据所确定的信号发生器(或者根据信号发生器对于车辆的驾驶操纵是否相关)来运行在路口处的驾驶功能。
根据另一方面,描述了一种软件(SW)程序。该软件程序可以被设置为在处理器上(例如在车辆的控制单元上)运行,从而执行本文中描述的方法。
根据另一方面,描述了一种存储介质。该存储介质可以包括软件程序,该软件程序被配置为在处理器上运行,从而执行本文中描述的方法。
如上所述,在本文中描述的驾驶功能特别是可以被设计为在信号单元处和/或结合信号单元(特别是信号单元的信号发生器)来自动地纵向引导车辆。在此,可以根据SAE 2级设计驾驶功能。换言之,驾驶功能必要时可以提供根据SAE 2级的自动驾驶和/或驾驶员辅助(就纵向引导而言)。驾驶功能可以限于车辆的纵向引导。车辆的横向引导在驾驶功能的运行期间必要时可以由驾驶员手动提供,或者由其他和/或单独的驾驶功能(例如车道保持辅助)提供。
在自动驾驶的范畴中,可以根据设定速度或目标速度和/或根据与(紧邻)在车辆前方行驶的前车的目标距离来自动地纵向引导车辆。为此目的,驾驶功能可以提供速度调节器,通过其根据设定速度或目标速度来设置、特别是调节车辆的实际行驶速度。替代地或附加地,可以提供距离调节器,通过其根据目标距离来设置、特别是调节车辆与前车的实际距离。如果不存在相关的前车或者前车行驶得比设定速度或目标速度更快,则可以调节车辆的行驶速度。替代地或附加地,如果前车行驶得比设定速度或目标速度慢,则可以调节车辆与前车的距离。因此,驾驶功能可以被配置为提供自适应巡航控制(ACC)驾驶员辅助功能。
车辆可以包括用于与车辆的用户、特别是驾驶员交互的用户界面。用户界面可以包括一个或多个操作元件,使得用户可以定义设定速度或目标速度和/或目标距离。替代地或附加地,该一个或多个操作元件可以使得用户可确认车辆的预定的设定速度和/或目标速度和/或预定的目标距离,以运行驾驶功能。该一个或多个操作元件可以被设计为通过驾驶员的手和/或手指来操纵。替代地或附加地,该一个或多个操作元件可以布置在车辆的转向装置处(特别是在方向盘处或转向支架处)。
示例性操作元件(特别是加/减操作元件)是如下按钮和/或摇杆,通过其可以增大或减小设定速度和/或目标速度或目标距离。另一示例性操作元件(特别是设置操作元件)是如下按钮,通过其可以将车辆的当前行驶速度定义为设定速度和/或目标速度或者将车辆与前车的当前距离定义为目标距离。另一示例性操作元件(特别是恢复操作元件)是如下按钮,通过其可以重新确认或再次激活先前设置的设定速度和/或目标速度或先前设置的目标距离。
此外,用户界面还可以包括一个或多个输出元件(例如屏幕和/或扬声器和/或振动元件),借以可以实现向车辆用户的输出。
此外,驾驶功能可以被配置为在自动纵向引导中考虑车辆所行驶的车道(特别是道路)和/或行驶路线上的一个或多个信号单元。信号单元可以被设置用于定义车辆所行驶的车道网络的路口(特别是十字路口)处的先行权。在此,先行权的定义可随时间改变(例如在信号灯装置的情况中,例如在红绿灯装置中,在路口处对于车辆的一个或多个不同行驶方向具有一个或多个不同的信号组(分别具有一个或多个信号发生器))或被固定地预设(例如在交通标志的情况中,例如在停车标志中)。
在驾驶功能的运行期间,可以确定关于位于车辆行驶方向前方的(在路口处的)信号单元的数据。该数据可以包括在车辆所行使的车道网络中关于信号单元和/或路口的地图数据。地图数据可以分别包括信号单元的一个或多个属性。信号单元的一个或多个属性可以表示或包括:
·信号单元的类型,特别是信号单元是信号灯装置还是交通标志;和/或
·在设置有信号单元或与信号单元相关联的车道网络的路口处,信号单元对于不同行驶方向和/或不同车道的不同信号组的数量(和每个信号组的信号发生器的数量);和/或
·信号单元和/或信号单元的停止线在车道网络内的位置(例如GPS坐标);和/或
·停止线与对应的信号单元的相对距离;和/或
·信号单元的各个信号发生器彼此之间的相对距离和/或相对布置。
驾驶功能可以被配置为通过使用车辆的位置传感器(例如GPS接收器)和/或通过使用里程计来确定车辆在车道网络内的实际位置(例如当前GPS坐标)。然后,借助于地图数据可以识别车辆行驶路线上或驶向前方路口的路线上(例如下一个)信号单元。此外,还可以确定关于所识别的信号单元的一个或多个属性。
替代地或附加地,关于位于车辆行驶方向前方的信号单元的数据可以包括关于信号单元的(在路口处的)环境数据,或者可以基于环境数据来确定。环境数据可以由车辆的一个或多个环境传感器检测。示例性的环境传感器是摄像机、雷达传感器、激光雷达传感器等。一个或多个环境数据可以被配置为检测关于在车辆前方的行驶方向上的环境的传感器数据(即环境数据)。
驾驶功能可以被配置为基于环境数据(特别是基于摄像机的传感器数据)识别出在车辆前方的行驶方向上布置有信号单元。为此目的,例如可以使用图像分析算法。此外,驾驶功能可以被配置为基于环境数据来确定信号单元的类型(例如信号灯装置或交通标志)。此外,驾驶功能还可以被配置为基于环境数据确定信号单元关于与信号单元相关联的路口通行许可的(信号)状态。特别是可以确定信号灯装置的一个或多个信号组的颜色(绿色、黄色或红色)。
驾驶功能可以被配置为在车辆的自动纵向引导中考虑所识别的信号单元。驾驶功能特别是可以被配置为基于关于所识别的信号单元的数据,特别是基于由数据表示的信号单元的灯光信号或信号组的颜色来确定车辆是否必须停止在信号单元处,特别是信号单元的停止线处。例如,可能识别出车辆必须停止,因为与车辆相关的信号组是红色的。或者可能识别出车辆不必停止,因为与车辆相关的信号组是绿色的。在另一示例中,可能识别出车辆必须停止,因为信号单元是停车标志。
此外,驾驶功能还可以被配置为当确定车辆必须在信号单元处停止时,使车辆在所识别的信号单元处自动地停止。为此目的,可以实现自动减速过程(直到静止)。在此,可以自动引导车辆直到到达信号单元的停止线处或停止线前。在自动减速过程中,可以通过驾驶功能自动控制一个或多个车轮制动器(例如一个或多个摩擦制动器或者一个或多个回收制动器),以便使车辆制动(直到静止)。在此,所实现的减速的时间过程可以取决于到所识别的信号单元的可用制动距离。
替代地或附加地,驾驶功能可以被配置为当确定车辆不必在信号单元处停止时,使得自动地纵向引导车辆行驶通过所识别的信号单元,特别是通过信号单元的停止线。在此,可以根据设定速度或目标速度和/或与前车的目标距离继续进行速度和/或距离调节。
因此,驾驶功能可以被配置为通过考虑信号单元来提供ACC驾驶功能。驾驶功能在本文中也被称为城市巡航控制(UCC)驾驶功能。
如上所述,驾驶功能可以被配置为在驾驶功能的范畴中根据目标速度和/或根据与在车辆前方行驶的前车的目标距离自动地纵向引导车辆。此外,驾驶功能还可以被配置为,如果在驾驶功能中不考虑(可能识别出的)信号单元,则特别是与信号单元的灯光信号颜色无关地根据目标速度和/或目标距离自动地纵向引导车辆行驶通过信号单元,特别是通过信号单元的停止线。因此,驾驶功能(在不考虑信号单元的情况下)必要时可以运行为就像信号单元(和与之相关的路口)不存在一样。
驾驶功能必要时可以使得车辆用户可通过用户界面(例如在配置菜单中)配置驾驶功能。在此必要时可以设置应当以自动模式还是手动模式运行驾驶功能。
在自动模式下,驾驶功能可以如下运行,即在驾驶功能运行时自动考虑识别到的位于行驶方向前方的信号单元(并且必要时促使车辆自动减速)。特别地,驾驶功能在自动模式下可以被配置为在车辆的自动纵向引导中特别是无需车辆用户的确认而自动考虑基于地图数据和/或环境数据所检测的信号单元(例如以便在需要时使得车辆在所检测的信号单元处自动减速)。
另一方面,在手动模式下,驾驶功能可以如下运行,即在车辆的自动纵向引导中仅在车辆用户确认之后才考虑所识别的信号单元(并且必要时促使车辆自动减速)。特别地,驾驶功能在手动模式下可以被配置为(通过车辆的用户界面)向车辆用户发出关于考虑所识别的信号单元的建议。例如,在屏幕上可以显示出已识别到信号单元并且需要用户反馈(以使得在车辆的自动纵向引导中考虑信号单元)。当(特别是仅当)用户接受建议时(例如通过操作元件、特别是设置操作元件的确认),则可以在信号单元处的车辆自动纵向引导中考虑所识别的信号单元(特别是信号单元的信号状态)。然后必要时在所识别的信号单元处进行车辆的自动减速。另一方面,驾驶功能可以被配置为,如果用户不接受该建议,则在信号单元处的车辆自动纵向引导中不考虑和/或忽略所识别的信号单元(特别是信号单元的信号状态)。在这种情况下,可以继续进行速度和/或距离调节(不考虑信号单元,特别是就像信号单元不存在一样)。
通过为驾驶功能(特别是UCC驾驶功能)的运行提供不同的(可调节的)模式,可以进一步提高驾驶功能的舒适性。
驾驶功能可以被设计为借助于用户界面向驾驶功能的用户通知驾驶功能的状态。特别是可以通知驾驶功能的用户关于如下信息:在驾驶功能的运行中、特别是在车辆的自动纵向引导中,是否考虑识别到的位于行驶方向前方的信号单元。
驾驶功能可以被配置用于(例如基于地图数据和/或环境数据)确定在驾驶功能的运行中是否将考虑或是否可考虑位于行驶方向前方的信号单元。如果将考虑或可考虑信号单元,则必要时可以发出可用性输出、特别是可用性显示,以便通知用户在车辆的自动纵向引导中将考虑位于前方的信号单元(从而在需要时进行车辆在信号单元处的自动减速)。
替代地或附加地,驾驶功能可以被配置为(当确定在驾驶功能中不会考虑或无法考虑位于前方的信号单元时)(通过用户界面)产生不可用性输出、特别是不可用性显示,以便通知车辆用户在车辆的自动纵向引导中不会考虑位于前方的信号单元(从而也不会根据信号单元的信号状态使车辆自动减速)。
通过发出可用性和/或不可用性输出,可以进一步提高驾驶功能的舒适性和安全性。在此,可用性和/或不可用性输出可以分别包括视觉、听觉和/或触觉输出。
驾驶功能可以被配置为确定信号单元的与车辆的行驶方向或驾驶操纵相关的信号组(或相关的信号发生器)的信号状态发生变化(例如,在车辆驶近信号组期间,或在车辆处于信号组期间)。例如,可以识别出发生了从红色到绿色的相变。
此外,驾驶功能可以被配置为(响应于所识别的相变)使得将关于信号单元信号组的发生变化的信号状态的信息传递给车辆的驾驶员。例如,可以使得只要信号组呈现红色就通过用户界面的输出元件(特别是在屏幕上)显示所识别的(并且必要时在自动纵向引导中所考虑的)信号单元的符号。在识别出相变为绿色之后,则必要时可以撤回所显示的符号或可以终止输出。因此,可以通过可靠的方式告知车辆驾驶员例如在车辆在信号单元处停止后可能产生(必要时自动的)起步过程(例如通过操纵用户界面的操作元件)。
驾驶功能可以被配置为当驾驶功能被中断时向车辆的驾驶员发出接管请求。例如,可能识别出自动纵向引导(根据设定速度和/或目标速度和/或根据目标距离)无法或不会继续进行。例如,如果车辆的驾驶员(主要)干预车辆的纵向引导(例如通过车辆的驾驶员操纵制动踏板或加速踏板),则可能发生驾驶功能的中断。然后可以向车辆驾驶员发出接管请求(TOR)。然后,纵向引导必须再次由驾驶员实施。通过发出接管请求可以提高车辆运行的安全性。
在本文的范畴中,术语“自动驾驶”可以理解为具有自动纵向或横向引导的驾驶,或者具有自动纵向和横向引导的自主驾驶。自动驾驶例如可以涉及在高速公路上较长时间的驾驶或者涉及在泊车或调整车辆过程中时间有限的驾驶。术语“自动驾驶”包括具有任意自动化程度的自动驾驶。示例性的自动化程度有辅助驾驶、部分自动驾驶、高度自动驾驶或全自动驾驶。这些自动化程度由联邦公路研究所(BASt)定义(请参阅BASt出版物“研究报告”,版本11/2012)。在辅助驾驶中,驾驶员持续执行纵向或横向引导,而系统则在一定限制范围内接管相应的其他功能。在部分自动驾驶(TAF)中,系统在一定时间段内和/或在特定情况下接管纵向和横向引导,其中驾驶员必须如在辅助驾驶中一样持续监控系统。在高度自动驾驶(HAF)中,系统在一定时间段内接管纵向和横向引导,而无需驾驶员持续地监控系统,然而驾驶员必须能够在一定时间内接管车辆引导。在全自动驾驶(VAF)中,系统可以对于特定应用场合在所有情况下自动管控驾驶,该应用场合不再需要驾驶员。上述四个自动化程度对应于SAE J3016标准(SAE-美国汽车工程师协会)的SAE级别1至4。例如,高度自动驾驶(HAF)对应于SAE J3016标准的3级。此外,在SAE J3016中还规定了SAE 5级作为最高自动化程度,其未包含在BASt的定义中。SAE 5级对应于无人驾驶,其中系统可以在整个行驶期间如人类驾驶员一样自动处理所有情况,一般不再需要驾驶员。本文中所述的方面特别是涉及一种根据SAE 2级设计的驾驶功能或驾驶员辅助功能。
应注意的是,本文中描述的方法、装置和系统不仅可以单独使用,而且可以与本文中描述的其他方法、装置和系统组合使用。此外,本文中描述的方法、装置和系统的任何方面均可以彼此以多种方式组合。特别是权利要求的特征可以彼此以多种方式组合。
附图说明
下面借助于实施例更详细地说明本发明。其中:
图1示出了车辆的示例性组件;
图2a示出了示例性的信号灯装置;
图2b示出了示例性的交通标志;
图3示出了示例性的交通状况;
图4示出了示例性的用户界面;
图5示出了示例性的路口;并且
图6示出了用于在路口处运行驾驶功能的示例性方法的流程图。
具体实施方式
如开头所述,本文涉及提高车辆驾驶功能、特别是驾驶员辅助系统的可靠性、可用性和/或舒适性,其与在车辆所行驶车道的路口处的信号单元相关联。特别是,本文涉及为驾驶功能的运行提供精确的地图数据。特别地,本文涉及以可靠且精确的方式识别车辆的驾驶员在路口处的驾驶意图,以提高驾驶功能的品质。
图1示出了车辆100的示例性组件。车辆100包括一个或多个环境传感器103(例如一个或多个图像摄像机、一个或多个雷达传感器、一个或多个激光雷达传感器、一个或多个超声波传感器等),其被设置为检测关于车辆100的环境(特别是关于位于车辆100行驶方向前方的环境)的环境数据。此外,车辆100还包括一个或多个执行器102,其被设置为作用于车辆100的纵向和/或横向引导。示例性的执行器102是制动系统、驱动马达、转向装置等。
控制单元101(在本文中也称为车辆引导系统)可以被设置为基于一个或多个环境传感器103的传感器数据(即基于环境数据)来提供驾驶功能,特别是驾驶员辅助功能。例如,基于传感器数据可以识别车辆100的行驶轨迹上的障碍物。然后,控制单元101可以控制一个或多个执行器102(例如制动系统),以便使车辆100自动减速,从而避免车辆100与障碍物的碰撞。
特别是在车辆100的自动纵向引导的范畴中,除了前方车辆之外,还可以考虑在车辆100所行驶的车道或道路上的一个或多个信号单元(例如信号灯装置和/或交通标志)。在此,特别是可以考虑信号灯装置或红绿灯装置的状态,使得车辆100在与其自身(所规划的)行驶方向相关的红灯处自动实现减速直到交通灯的停止线,和/或在绿灯的情况下(必要时再次)加速。
信号灯装置在不同的国家可以设计得非常不同,并且此外在行驶方向信号灯分配方面也具有不同的复杂度。因此,不同的行驶方向可以由第一组信号或一个信号组捆绑地调节,并且另一方向可以由另一信号组调节。此外,信号组的重复信号也可以在地理上位于十字路口的不同位置。因此,对于控制单元101可能难以基于传感器数据来识别十字路口处的信号灯装置的哪个或哪些信号(即,信号发生器)与车辆100的所规划的行驶方向相关,而哪些不相关(特别是如果车辆100离信号灯装置仍相对较远)。
图2a示出了示例性的信号灯装置200。图2a所示的信号灯装置200具有四个不同的信号发生器201,其被布置在通往十字路口的入口处的不同位置。左侧信号发生器201具有向左的箭头202,从而表示该信号发生器201适用于左转。两个中间的信号发生器201具有向上的箭头202(或没有箭头202),从而表示这两个信号发生器201适用于直行。这两个信号发生器201的各个指示灯形成信号组。此外,右侧信号发生器201具有向右的箭头202,从而表示该信号发生器201适用于右转。
图2a中所示的信号灯装置200仅是信号灯装置200的许多不同的可能设计方案中的一个示例。信号灯装置200可以具有相对大量的不同特征。示例性特征如下:
·信号发生器201和/或信号组的数量;
·一个或多个信号发生器201的位置;和/或
·信号发生器201对十字路口上可能的行驶方向的分配。
图2b示出了示例性的停车标志,作为交通标志210,通过其控制交通路口处、特别是十字路口处的先行权。车辆100的控制单元101可以被配置为基于一个或多个环境传感器103的传感器数据(即基于环境数据)和/或基于数字地图信息(即地图数据)来识别在车辆100所行驶的道路或车道上与车辆100的先行权相关的交通标志210。
图3示例性地示出了在车道上向信号单元200、210(特别是向信号灯装置200和/或向交通标志210)移动的车辆100。车辆100的一个或多个环境传感器103可以被配置为检测关于信号单元200、210的传感器数据(特别是图像数据)。然后可以分析传感器数据(例如借助于图像分析算法),以确定信号单元200、210的一个或多个特征的特性。特别是可以基于传感器数据确定信号单元200、210是信号灯装置200还是交通标志210。此外可以确定信号灯装置200的哪个信号发生器201与车辆100的(所规划的)行驶方向相关。此外可以确定相关的信号发生器201的(信号)状态(例如颜色,如红色、黄色或绿色)。
基于环境数据可以确定信号单元200、210的特征特性的质量和/或可靠性通常取决于车辆100与信号单元200、210的距离311。此外,当前的天气条件通常也对所确定的特征特性的质量和/或可靠性具有显著影响。此外,质量和/或可靠性可能对于不同的特征而不同。
车辆100可以具有存储单元104,在其上存储有关于车辆100所行驶的道路网络的数字地图信息(即地图数据)。地图数据可以显示道路网络中一个或多个信号单元200、210的一个或多个特征的特性作为属性。信号灯装置200的地图数据特别是可以显示一个或多个信号发生器201或信号组对不同的可能行驶方向或驾驶操纵的分配。换言之,地图数据可以显示哪个信号发生器201或哪个信号组负责哪个行驶方向或哪个驾驶操纵的放行。必要时可以通过车辆100处的无线通信链路301(例如WLAN或LTE通信链路)借助于车辆100的通信单元105从车辆外部单元300接收地图数据。
车辆100的控制单元101可以被配置为(例如基于车辆100的当前位置且基于所规划的行驶路线和/或基于一个或多个环境传感器103的环境数据)确定车辆100正在驶向位于前方的信号单元200、210。此外,控制单元101可以基于(所存储和/或所接收的)地图数据来确定位于前方的信号单元200、210的一个或多个特征的特性。特别是可以基于地图数据来确定信号灯装置200的哪个信号发生器或哪个信号组201被分配给车辆100的当前或所规划的行驶方向。此外,可以基于环境数据来确定所分配的信号发生器或所分配的信号组201的当前状态。然后,可以在此基础上以可靠且舒适的方式执行自动驾驶功能(例如车辆100的自动纵向引导)。特别是可以通过考虑地图数据,在车辆100与信号单元200的距离311相对较大时就已确定信号单元200的一个或多个相关特征的特性,从而可以提高自动驾驶功能的可靠性、可用性和舒适性。
车辆100通常包括具有一个或多个操作元件和/或具有一个或多个输出元件的用户界面107。图4示出了具有显示单元400的示例性用户界面107,特别是具有用于输出视觉信息的屏幕。在显示单元400上,例如可以通过显示元件401输出在位于前方的信号单元200、210处自动引导车辆100的建议。替代地或附加地,必要时可以提供借以显示驾驶功能的状态(例如激活或非激活)的显示元件402。
替代地或附加地,用户界面107可以包括至少一个扬声器420作为输出元件,通过其可以向车辆100的驾驶员发出听觉输出(例如警告音)。
此外,用户界面107可以包括使得车辆100的驾驶员可激活和/或参数化驾驶功能的一个或多个操作元件411、412、413。示例性操作元件是摇杆411,其使得驾驶员可以指定、特别是增大或减小车辆100的设定速度(即目标行驶速度)。另一示例性操作元件是设置操作元件412,其使得驾驶员可以将当前行驶速度指定为设定速度和/或接受在位于前方的信号单元200、210处自动引导车辆100的建议(例如在驾驶功能的手动模式下)。此外,用户界面107可以包括恢复操作元件413,其使得驾驶员可以例如以预定的设定速度再次激活驾驶功能。
车辆100的控制单元101可以被设计为在城市区域中提供车辆100的自动纵向引导。该驾驶功能例如可以被称为城市巡航控制(UCC)驾驶功能。在此,可以在自动模式(aUCC)和/或手动模式(mUCC)下提供驾驶功能。在此,必要时可以使得驾驶员可通过用户界面107来指定应当是以自动模式还是手动模式运行驾驶功能。
车辆100的控制单元101可以被配置为基于一个或多个环境传感器103的环境数据和/或基于地图数据(结合车辆100的位置传感器106的位置数据)检测在车辆100的行驶路线上位于前方的信号单元200、210。在UCC驾驶功能的手动模式下,则可以通过用户界面107发出关于在车辆100的自动纵向引导中是否应当考虑信号单元200、210的建议或询问。然后,车辆100的驾驶员可以例如通过操纵设置操作元件412来接受或拒绝或者忽略该建议。另一方面,在UCC驾驶功能的自动模式下,必要时可以在车辆100的自动纵向引导中自动(即无需驾驶员的反馈)考虑所识别的信号单元200、210。
如果在车辆100的自动纵向引导中考虑所识别的信号单元200、210,则可以(根据信号单元200、210的类型和/或(信号)状态)实现自动减速,以使车辆100(例如在红色交通灯处或在停车标志处)自动停止。此外,(例如在信号单元200、210的(信号)状态变化之后,例如在变为绿色之后)可以实现车辆100的自动起步。然后,车辆100可以再次自动加速到设定速度(通过考虑所指定的与前车的最小或目标距离)。
由此,利用UCC驾驶功能可以使得车辆100的驾驶员在具有一个或多个信号单元200、210的道路上也可以使用ACC驾驶功能(而不必在各个信号单元200、210处分别停用和再次激活ACC功能)。
控制单元101可以被配置为基于环境数据和/或基于地图数据来确定在自动纵向引导中是否可以考虑位于前方的信号单元200、210。如果确定在自动纵向引导中无法考虑位于前方的信号单元200、210,则可以向车辆100的驾驶员进行输出(例如通过显示单元400、402进行的视觉输出),以通知车辆100的驾驶员在自动纵向引导中无法考虑位于前方的信号单元200、210。该显示可以被称为“不可用性显示”。然后,车辆100的驾驶员的任务是必要时使车辆100在信号单元200、210之前减速(例如,因为交通灯切换到红色,或者因为信号单元200、210为停车标志)。
此外,控制单元101可以被设置为在UCC驾驶功能运行期间识别出无法(再)自动纵向引导车辆100(例如,因为驾驶员在车辆100的纵向引导中进行了手动干预)。在这种情况下,可以向车辆100的驾驶员发出接管请求(TOR),以促使驾驶员手动接管车辆100的纵向引导。
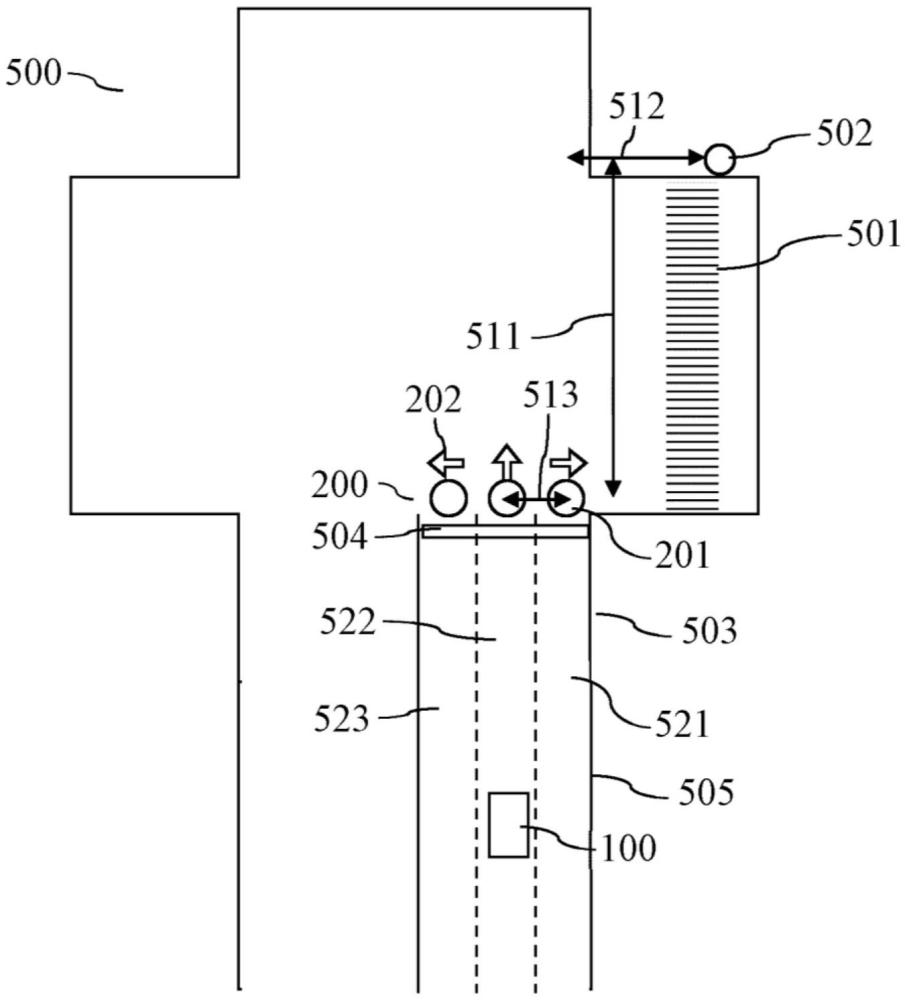
图5示出了具有信号单元200的示例性路口500。在此,信号单元200可以包括多个信号发生器201,其必要时可以被分配给不同的驾驶方向202。车辆100位于通往路口500的入口503上,并且可以被设置为检测关于车辆100的周围环境的环境数据。在此,环境数据(特别是摄像机的图像数据)可以指示通往路口500(特别是十字路口)的入口503的信号单元200(特别是信号单元200的一个或多个信号发生器201)。此外,车辆100的一个或多个环境传感器103可以指示车辆100的环境中、特别是路口500处的一个或多个其他地标,例如路口500的人行横道501处的行人交通灯502、入口503的停止线504、车道标记505等。
关于路口500的数字地图数据可以包括关于路口500处的一个或多个地标的相对布置的信息。例如,可以指示信号发送单元200与行人交通灯502之间的纵向距离512和/或横向距离511。替代地或附加地,可以指示信号发送单元200的不同信号发生器201之间的横向距离513。因此,地图数据可以指示关于路口500的(内部)几何形状的几何数据。该几何数据可以用于确定车辆100相对于路口500的位置。
如上所述,在运行驾驶功能、特别是UCC驾驶功能时,可以考虑车辆100在路口500处的预期驾驶方向。预期驾驶方向可以例如基于车辆100的导航系统上规划的路线来确定。然后,可以确定信号单元200的与预期驾驶方向相关的信号发生器201的信号状态,并且在运行驾驶功能时将其考虑在内。
在运行驾驶功能期间,可能会出现导航系统没有规划路线的情况。然而,为了能够可靠地预测车辆100的驾驶员在路口500处规划的驾驶方向,可以确定并考虑通往路口500的入口503的车道521、522、523,车辆100在该车道上驶向路口500。地图数据可以包括与以下内容相关的信息:
·路口500的入口503的车道521、522、523的数量;和/或
·与路口500处的相应车道521、522、523相关联的驾驶方向(例如左转车道、直行车道、右转车道)。
车辆引导系统101可以被设置为基于环境数据从多个车道521、522、523中确定车辆100在其上驶向路口500的车道522。此外,车辆引导系统101可以被设置为基于地图数据来确定与车辆100所行驶的车道522相关联的驾驶方向。此外,基于地图数据,可以确定与所确定的驾驶方向相关的和/或与车辆100所行驶的车道522相关联的信号发生器201。然后,可以根据所确定的信号发生器201、特别是根据所确定的信号发生器201的信号状态来运行驾驶功能。
车辆引导系统101可以被设置为基于来自地图数据的几何数据来确定车辆100所行驶的车道522。特别地,基于环境数据,可以确定关于以下内容的一个或多个基于环境数据的距离值:
·车辆100距车辆100的环境中的一个或多个地标200、201、501、502、504、505的距离;和/或
·车辆100的环境中的不同地标200、201、501、502、504、505之间的距离。
此外,基于来自地图数据的几何数据,可以确定关于车辆100的环境中的不同地标200、201、501、502、504、505之间的距离的基于地图数据的距离值511、512、513。
然后,基于一个或多个基于环境数据的距离值和一个或多个基于地图数据的距离值511、512、513,可以以精确且稳健的方式确定车辆100驶向路口500所在的车道522。
因此,车辆引导系统101可以被设置为通过在识别驾驶员意图时考虑车辆100当前所在的车道522的一个或多个允许的驾驶方向202来改进对路口500处的驾驶操纵的预测。在此,车道522的一个或多个允许的驾驶方向可以从数字地图中获取。
通过将车辆100的位置与存储在数字地图中的关于车道522的走向的信息进行比较,可以确定当前车道522。在此,可以利用GNSS(全球导航卫星系统)来确定位置。替代地或附加地,通过识别出的信号发生器201的(基于环境数据确定的)相对位置和/或一个或多个其他地标501、502、504、505(例如标志牌、车道标记、柱子等)的(基于环境数据确定的)相对位置与数字地图中的相应的相对位置的比较,可以确定车辆100的精确位置、特别是相对于存储在数字地图中的车道521、522、523的走向的精确位置。
替代地或附加地,可以考虑来自多个相继时间步长的信息,以便确定车辆100所行驶的车道522。特别地,可以考虑关于车辆100在两个相继时间步长之间的运动的信息(例如速度和/或偏航率)。
在通往具有交通信号设施200的十字路口500的入口503上,对于UCC驾驶功能来说特别相关的是获得关于路口500处的驾驶操纵的驾驶员意图的认知。除了直接可用的源(例如车辆100的主动导航路线或主动指示灯)之外,还可以经由车道分配做出关于规划的驾驶操纵的稳健假设。为此目的,可以根据多个地标201、501、502、504、505(例如标志牌、交通灯、车道)的相对位置来建立基于传感器的环境模型,该相对位置由车辆自身的传感器103、特别是至少一个摄像机确定。基于传感器的环境模型可以与来自数字地图的相应地标的位置(即,与基于地图的环境模型)进行比较,以便获得车辆100在数字地图内的精确定位。基于该定位,可以确定车辆100位于哪条车道522中。借助十字路口500中的车道引导,数字地图还可以用于推断出当前车道522被分配给十字路口区域中的一个或多个驾驶操纵。然后,通过这些信息可以从数字地图中确定与预期的驾驶操纵相关的信号组进而确定相关的一个或多个信号发生器201。
图6示出了用于运行驾驶功能以在路口500处自动地纵向和/或横向引导机动车辆100的示例性(必要时计算机实现的)方法600的流程图。该驾驶功能特别是本文中描述的UCC功能。
方法600包括确定601车辆100所位于的通往路口500的入口503的车道522。车道522可以基于环境数据和/或基于地图数据来确定。
此外,方法600包括基于所确定的车道522来确定602路口500的(前方)信号单元200的至少一个信号发生器201对于车辆100在路口500处的驾驶操纵是否相关。替代地或附加地,基于所确定的车道522可以确定(前方)信号单元200的与车辆100在路口500处的(预期的)驾驶操纵相关的至少一个信号发生器201。可以基于关于路口500的地图数据来确定相关的信号发生器201,特别是与所确定的车道522和/或与车辆100的预期驾驶操纵相关联的信号发生器201。示例性的驾驶操纵是右转、左转或直行。
方法600还包括根据路口500的信号单元200的至少一个信号发生器201对于车辆100在路口500处的驾驶操纵是否相关和/或根据所确定的信号发生器、特别是根据信号发生器201的信号状态(例如颜色)来运行603在路口500处的驾驶功能201。例如,如果所确定的信号发生器201指示允许车辆100行驶经过路口500,则可以自动地纵向引导车辆100经过路口500。替代地,如果所确定的信号发生器201指示不允许车辆100进入路口500,则可以自动地使车辆100减速至停止。
通过本文中描述的措施,可以以特别可靠且鲁棒的方式提供在交通路口500处的驾驶功能,特别是用于自动纵向引导的驾驶功能。
本发明并不局限于所示的实施例。特别是应注意,说明书和附图仅旨在说明所提出的方法、装置和系统的原理。
- 用于运行驾驶员辅助系统的方法和驾驶员辅助系统
- 用于求得将要驶过的轨迹和/或实施行驶干预的车辆系统的运行方法、控制系统的运行方法和机动车
- 用于根据前方车辆运行驾驶功能的车辆引导系统和方法
- 用于在不同模式下运行驾驶功能的车辆引导系统和方法