电动机控制装置、电动机控制方法以及电动机系统
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及用于永磁铁同步电动机(permanent magnet synchronous motor)的电动机控制装置和电动机控制方法、以及具备该电动机控制装置的电动机系统。
背景技术
原本理想的是永磁铁同步电动机的转矩与转子的旋转位置无关地表示出预定的大小。但是,由于各种各样的原因,有可能产生脉动(ripple)。这样的转矩脉动成为振动和噪声的原因,因此要求降低转矩脉动。
日本公开公报特开2008-54386号公报公开了以下的技术,即不只降低因电动机的构造产生的第6次谐波的转矩脉动分量,还降低因制造上的尺寸偏差可能产生的第2次谐波的转矩脉动分量。该技术与希望抑制的谐波的频率匹配地调整电流控制增益(比例增益和积分增益),由此能够降低该频率下的转矩脉动。
日本公开公报特开2013-085439号公报公开了如下内容,即为了降低因磁转矩造成的转矩脉动,而向普通的d轴和q轴的电流(0次电流)的至少一方重叠电角6次的谐波电流(以下有时简称为“6次谐波电流”)。
现有技术文献
专利文献
专利文献1:日本公开公报特开2008-54386号公报
专利文献2:日本公开公报特开2013-85439号公报
发明内容
发明要解决的课题
在根据转矩脉动的频率设定电流控制器的各种增益的现有技术中,针对电流指令的响应变慢。另外,电角6次的谐波电流的重叠对减少6次的转矩脉动显示出效果,但没有降低因制造上的尺寸偏差可能产生的低次的转矩脉动的效果。
本发明的实施方式提供抑制因制造上的尺寸偏差而产生的N次谐波分量的新的电动机控制装置和电动机控制方法。另外,本发明的实施方式提供具备该电动机控制装置的电动机系统。
用于解决问题的方法
本发明的电动机控制装置在示例性的实施方式中,是对具有定子和转子的永磁铁同步电动机进行控制的电动机控制装置,该电动机控制装置具备处理器和存储器,上述存储器存储对上述处理器的动作进行控制的程序,上述处理器按照上述程序的指令执行以下的处理:根据速度指令或转矩指令,确定与上述转子的旋转同步地旋转的dq轴坐标系中的q轴电流;以及将把具有与上述永磁铁同步电动机的齿槽转矩的N次谐波分量的相位相反的相位的N次谐波电流重叠到上述q轴电流而得的值确定为q轴电流指令值,其中,N为2以上的整数。
本发明的电动机控制方法在示例性的实施方式中,是对具有定子和转子的永磁铁同步电动机进行控制的电动机控制方法,该电动机控制方法包括如下步骤:根据速度指令或转矩指令,确定与上述转子的旋转同步地旋转的dq轴坐标系中的q轴电流;确定具有与上述永磁铁同步电动机的齿槽转矩的N次谐波分量的相位相反的相位的N次谐波电流的振幅和相位;以及将把上述N次谐波电流重叠到上述q轴电流而得的值确定为q轴电流指令值。
本发明的电动机系统在示例性的实施方式中,具备:表面磁铁型的永磁铁同步电动机,其具备分割定子和转子;电动机驱动装置,其与上述永磁铁同步电动机连接;以及电动机控制装置,其与上述电动机驱动装置连接。上述电动机控制装置具备处理器和存储器,上述存储器存储对上述处理器的动作进行控制的程序。上述存储器还存储由上述永磁铁同步电动机的齿槽转矩的N次谐波分量的相位和振幅规定的数值。上述处理器按照上述程序的指令执行以下的处理:根据速度指令或转矩指令,确定与上述转子的旋转同步地旋转的dq轴坐标系中的q轴电流;将把基于存储在上述存储器中的上述数值的N次谐波电流重叠到上述q轴电流而得的值确定为q轴电流指令值;以及上述永磁铁同步电动机的转矩脉动的N次谐波分量的振幅比上述齿槽转矩的N次谐波分量的振幅小。
发明效果
根据本发明的实施方式,能够有效地降低因制造偏差产生的转矩脉动的N次谐波分量。
附图说明
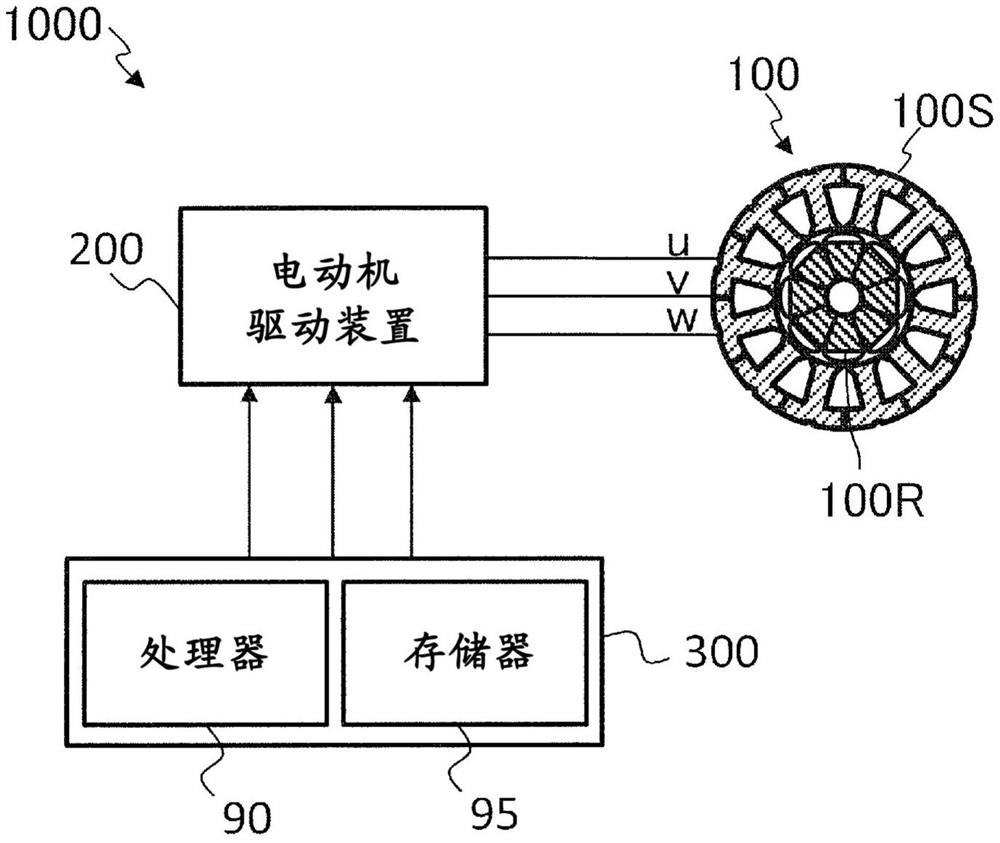
图1是示意地表示本发明的电动机系统的非限定性的示例性实施方式的结构的图。
图2是表示电动机100的结构例子的图。
图3是表示本发明的电动机系统的电动机控制装置的硬件结构的例子的图。
图4是表示本实施方式的定子100S的结构例子的图。
图5是表示本实施方式的转子100R的结构例子的图。
图6是示意地表示因制造偏差而在分割定子的内周面产生的变形的图。
图7是示意地表示本发明的电动机系统的非限定性的示例性的其他实施方式的结构的图。
图8是示意地表示本发明的集成电路装置的结构例子的图。
图9是表示本发明的电动机控制方法的实施方式的步骤的流程图。
图10是表示针对定子的内径的最小值或最大值相对于内径的平均值只有小于0.09%的差异的电动机(普通模型)得到的转矩的振幅与电角次数的关系的图表。
图11是表示针对因制造偏差而定子的内径的最小值或最大值相对于内径的平均值显示出0.09%以上的差异的电动机(偏差模型)得到的转矩的振幅与电角次数的关系的图表。
图12是表示在使图11的电动机动作时,将2次谐波电流重叠到q轴电流以便抵消2次转矩脉动的情况(重叠模型)下得到的转矩的振幅与电角次数的关系的图表。
图13是表示针对“偏差模型”和“普通模型”不进行2次谐波电流的重叠的情况下的转矩的时间变化的图表。
图14是表示针对“偏差模型”不进行2次谐波电流的重叠的情况下的转矩的时间变化、针对“偏差模型”进行2次谐波电流的重叠的情况(重叠模型)下的转矩的时间变化的图表。
图15是表示不将2次谐波电流重叠到q轴电流的情况下的2次转矩脉动(虚线)、将2次谐波电流重叠到q轴电流时的2次转矩脉动(实线)的图表。
具体实施方式
在具备转子(rotor)和定子(stator)的永磁铁同步电动机内,转子的外周面经由空气隙(air gap)与规定定子齿(stator teeth)的前端面的定子内周面相对。通过空气隙的磁通主要在径向(radial direction)和周向上流动。其结果是,在定子和转子之间产生周向的力(转矩)和径向的力(径向力)。将这些力称为“电磁力”。生成电磁力的交链磁通(interlinkage flux)包含因转子内的永磁铁产生的交链磁通、向定子的绕组通电而形成的交链磁通。贯通各齿的磁通分量(交链磁通)的大小在空间和时间上变化,因此电磁力也在空间和时间上变化。这成为电磁振动和转矩脉动(torque ripple)的原因。
已知通过将具有满足特定条件的振幅和相位的谐波电流(harmonic current)重叠到流过定子的绕组的电流中,能够减少因电动机驱动时的径向力造成的振动和噪声。
在本发明的电动机控制装置、电动机控制方法、电动机系统中,为了降低不是因径向力而是因制造偏差产生的低次的转矩脉动,而逆相位地重叠同次的谐波电流。
在说明本发明的实施方式之前,以下说明产生转矩脉动的主要原因。
一般,将转矩脉动的原因大致分为以下的2种。
(1)空间谐波(space harmonics)
转子的磁极在定子绕组上形成的交链磁通数根据转子的旋转位置而周期性地变化。以下,将转子的旋转位置称为“角度位置”或“位置”,通过相对于固定坐标系中的基准方向的角度θ来表示。定子绕组中流过电流时在各定子绕组中形成的交链磁通数也取决于有可能根据转子的位置θ而周期性地变化的电感。转子的磁极和电感除了分别包含以转子的位置θ为变量的基本波分量以外,有时还分别包含无法忽视的谐波分量(空间谐波分量)。这样的空间谐波分量使在定子绕组中流过电流时产生的转矩引起脉动(ripple)。
(2)齿槽转矩(cogging torque)
在定子绕组中不流过电流的状态(无负载状态)下,在位于转子和定子之间的空气隙处存在因转子的磁极造成的磁通,积蓄磁能(magnetic energy)。该空气隙由于存在定子具备的多个槽(slot),而与转子的位置θ对应地周期性地变化,因此磁能是转子的位置θ的函数。将定子绕组中不流过电流的状态下积蓄在空气隙处的磁能设为W(θ)时,产生用δW(θ)/δθ表示的大小的转矩。将其称为“齿槽转矩”。齿槽转矩不取决于定子绕组的电流(驱动电流)的有无。因此,如果定子绕组中流过电流而使电动机动作,则产生重叠了因空间谐波引起的分量和因齿槽现象引起的分量的转矩脉动。
以前,提出了用于降低转矩脉动的各种技术。例如,研究转子和定子的构造、或绕组的分布而使空间谐波分量变小。
根据本发明人们的实验,在通过使转子和定子的构造最佳化而能够充分降低转矩脉动的情况下,有时因电动机的制造偏差而转矩脉动增加。在本发明的实施方式中,通过对绕组电流重叠谐波电流,来降低这样的因制造偏差引起的转矩脉动。
首先,说明绕组电流的谐波分量对转矩的影响。
对于定子的各齿,如果设磁通为φ,齿前端的面积为S,交链磁通为Ψ,绕组的匝数为N,则用下述的数学式1表示各齿内的磁通密度B。
[数学式1]
通过转子的永磁铁产生的永磁铁分量Ψ
[数学式2]
Ψ=Ψ
在以UVW相的三相驱动的永磁铁同步电动机中,用以下的数学式3表示转矩T。
[数学式3]
其中,Ψ
如果考虑到空间谐波分量,则用以下的数学式4表示Ψ
[数学式4]
如果考虑到空间谐波分量,则分别用以下的数学式5和数学式6表示L
[数学式5]
[数学式6]
针对上述的公式3,进行dq/UVW变换,由此能够用与转子的旋转同步地旋转的dq轴坐标系来表现转矩。dq轴坐标系中的d轴的“d”是“direct”的首字母,d轴朝向转子的永磁铁的N极方向。q轴的“q”是“quadrature”的首字母,q轴朝向相对于d轴以电角(electricangle)90°正交的方向。
在此,为了简化,假设dq轴坐标系中的电流向量是没有重叠谐波电流的电流。即,通过d轴0次电流i
[数学式7]
其中,Ψ
此外,数学式7中的“C”是规定UVW/dq变换的矩阵,用以下的数学式8表示。“C”的转置矩阵[C]
[数学式8]
[数学式9]
在这些变换时,以下的数学式10和数学式11成立。
[数学式10]
Ψ
[数学式11]
i
根据数学式7,如以下的数学式12那样,通过0次分量(恒定分量)与6次谐波分量的和近似地表示dq轴坐标系中的转矩。
[数学式12]
T=T
在此,用以下的数学式13表示转矩的0次分量,用以下的数学式14表示6次谐波分量。
[数学式13]
[数学式14]
在不向绕组电流重叠谐波分量时,在dq轴坐标系中,产生与转子的位置θ对应地变化的6次谐波分量的交链磁通。为了将通过转子的永磁铁产生的U、V、W相的交链磁通ΨmU、ΨmV、ΨmW分别近似展开为与转子的位置θ对应地变化的1次、5次、7次的谐波分量的和,而产生该6次谐波分量。
为了降低径向力和转矩脉动的6次谐波分量,提出了如以下的数学式15所示那样,向d轴电流和q轴电流重叠6次谐波。
[数学式15]
其中,i
以上的说明对于没有制造偏差的理想的电动机成立。在实际的电动机中,有可能因制造偏差而产生2次或3次那样的低次的齿槽转矩。如后述那样,特别在具备分割定子的电动机的情况下,容易产生具有2次的谐波分量的齿槽转矩。并且,也有时因转子的永磁铁的厚度偏差而产生具有3次的谐波分量的齿槽转矩。
在本发明的实施方式中,例如为了有意地产生具有抵消因这样的各个电动机的制造偏差而产生的电角2次或3次的齿槽转矩(谐波分量)的相位和振幅的转矩(逆相位的谐波分量),而对绕组电流重叠2次或3次的谐波电流。更具体地说,通过向数学式7所示的q轴0次电流i
此外,根据电流指令或转矩指令,通过通常的向量控制算法,确定q轴电流(q轴0次电流i
以下,说明本发明的实施方式。
<电动机系统的结构例子>
以下,参照附图说明本发明的电动机系统的非限定性的示例性实施方式。此外,有时省略超出必要的详细说明。例如,有时省略已经公知的事项的详细说明、对实质上相同的结构的重复说明。这是为了避免以下的说明变得不必要的多余,使本技术领域的技术人员容易理解。本发明人们为了本技术领域的技术人员充分理解本发明,而提供附图和以下的说明。无意通过它们限定权利要求记载的主题。
首先,参照图1和图2,说明本实施方式的电动机系统的基本结构例子。
图1所示的电动机系统1000具备具有定子100S和转子100R的永磁铁同步电动机100、与永磁铁同步电动机100连接的电动机驱动装置200、与电动机驱动装置200连接的电动机控制装置300。
以下,将永磁铁同步电动机100简称为电动机100。该电动机100具备的定子100S如图2所示,具备多个定子齿100T、对各定子齿100T进行励磁的绕组100W。在图2中,为了简化,记载了围绕某一个定子齿100T设置的绕组100W。实际上,围绕各定子齿100T设置有绕组100W。转子100R具备转子铁芯100C、在转子铁芯100C的外周面排列在周方向上的多个永磁铁100M。通过电动机驱动装置200向定子100S具备的绕组100W施加电压。图2的例子中的电动机100具有8极12槽的结构。能够在本发明的实施方式中使用的永磁铁同步电动机的结构并不限于8极12槽。
再次参照图1。图1的电动机驱动装置200是具备逆变器作为主电路的电力变换器。作为构成元件,主电路包含多个功率半导体元件(在图1中未图示)。电动机控制装置300生成并输出使电动机驱动装置200内的各个功率半导体元件开关的控制信号(选通信号(gatesignal))。
电动机系统1000具备测定流过绕组100W的电流的电流传感器(未图示)。电流传感器例如可以是电流变换器(CT:Current Transformer),但并不限于此。在电动机驱动装置200具备一个或多个分流电阻的情况下,通过测定各分流电阻的电压降,能够测定流过绕组的电流。
在本发明的实施方式中,电动机控制装置300具备处理器90、存储控制处理器90的动作的程序的存储器95。处理器90按照程序的指令,执行以下的处理。
(1)根据速度指令或转矩指令,确定与转子100R的旋转同步地旋转的dq轴坐标系中的q轴电流。
(2)将具有与电动机100的齿槽转矩的N次谐波分量(N为2以上的整数)的相位相反的相位的N次谐波电流重叠到q轴电流所得的值确定为q轴电流指令值。
图3表示电动机控制装置300的硬件结构的例子。该例子中的电动机控制装置300具备通过总线相互连接的CPU(中央运算单元)320、PWM电路330、ROM(只读存储器)340、RAM(随机存取存储器)350、以及I/F(输入输出接口)360。也可以附加地将未图示的其他电路或设备(AD变换器等)与总线连接。PWM电路330向电动机驱动装置200提供驱动信号。该驱动信号被输入到电动机驱动装置200的开关元件的栅极端子,控制各开关元件的接通断开(ON/OFF)。规定CPU320的动作的程序和数据被存储在ROM340和RAM350的至少一方中。例如可以通过32位的通用的微控制器来实现这样的电动机控制装置300。例如可以由一个或多个集成电路芯片构成这样的微控制器。
通过程序规定电动机控制装置300进行的各种动作。也能够通过更新程序的内容的一部分或全部,而变更电动机控制装置300的动作的一部分或全部。这样的程序的更新既可以使用存储有程序的记录介质来进行,也可以通过有线或无线的通信来进行。能够使用图3的I/F360进行通信。电动机控制装置300的结构并不限于图3所示的例子。
根据本发明的实施方式,电动机100的转矩脉动的N次谐波分量的振幅比齿槽转矩的N次谐波分量的振幅小。例如,在齿槽转矩的N次谐波分量的振幅是平均转矩的0.7%以上的情况下,转矩脉动的N次谐波分量的振幅可能降低为该平均转矩的0.03%以下。这是因为重叠到q轴电流的N次谐波电流具有与齿槽转矩的N次谐波分量的相位相反的相位,因此通过“抵消”的效果,转矩脉动的N次谐波分量的振幅变小。换言之,将产生抵消齿槽转矩的N次谐波分量的转矩这样的N次谐波电流重叠到q轴电流中。该“抵消”的程度并不必须是完全的,只要能够使因制造偏差产生的齿槽转矩的振幅比重叠谐波电流之前的值低,就是充分的。
图1所示的存储器95存储有由电动机100的齿槽转矩的N次谐波分量的相位和振幅规定的数值(数值的组)。该数值既可以是齿槽转矩的N次谐波分量的“相位和振幅”自身,也可以是其“逆相位和振幅”。例如在2次谐波分量的情况下,“逆相位”相当于相对于齿槽转矩的2次谐波分量偏移180°相位。如果使处于逆相位关系的2个波重叠,则2个波的凹部与凸部重叠,由此波整体的振幅变小。如果逆相位地生成具有与齿槽转矩的2次谐波分量的振幅相同或相同程度的振幅的转矩的2次谐波分量,则能够很大地降低齿槽转矩的2次谐波分量。为了逆相位地生成这样的转矩的2次谐波分量,在本发明的实施方式中,将相对于齿槽转矩的2次谐波分量偏移180°相位后的2次谐波电流重叠到q轴电流。例如,在齿槽转矩的2次谐波分量的振幅是平均转矩的0.7%以上的情况下,如果进行这样的2次谐波电流的重叠,则能够使转矩脉动的N次谐波分量的振幅降低为平均转矩的0.03%以下。
此外,根据电动机,也有时因制造偏差造成的齿槽转矩的2次谐波分量或3次谐波分量充分小,例如低于平均转矩的0.7%。在这样的情况下,也可以不适用本发明的电动机控制。在不适用本发明的电动机控制的电动机系统的情况下,也可以在存储器95中不存储由齿槽转矩的N次谐波分量的相位和振幅规定的数值,或者存储零或其他特定的值。
在控制电动机100时,处理器90从存储器95取得存储在存储器95中的上述数值。处理器90根据所取得的数值,确定重叠到q轴电流的N次谐波电流的相位和振幅。
电动机100的结构并不限于上述的结构。既可以是将永磁铁排列在转子100R的表面的表面磁铁型电动机(SPM),也可以是将永磁铁组装到转子100R的内部的嵌入磁铁型电动机(IPM)。适合地适用本发明的电动机控制的电动机100的例子是表面磁铁型电动机。一般,表面磁铁型电动机与嵌入磁铁型电动机相比,被用于强烈要求转矩脉动小、转矩脉动少的用途。因此,通过适用本发明的电动机控制技术,能够应对该要求。
在定子100S是具备沿着转子100R的周方向排列的多个铁芯的分割定子的情况下,由于制造偏差,容易产生齿槽转矩的2次谐波分量。另外,有时由于永磁铁的厚度的偏差,产生齿槽转矩的3次谐波分量。因此,N次谐波分量的典型例子是2次或3次谐波分量。本发明的实施方式的电动机控制在适用于具备分割定子的表面磁铁型电动机的情况下,能够发挥最高的效果。
图4表示本实施方式的定子100S的结构例子。定子100S是具备围绕中心轴排列的多个铁芯100Sp的分割定子。在图4中,为了参考,在定子100S的左侧记载了一个铁芯100Sp。通过将分别具有图示的构造的铁芯100Sp连结起来,而实现分割定子。在图4的定子100S中,为了简化,省略了绕组100W的记载。在实际的定子100S中,围绕各个定子齿100T设置有绕组100W。定子100S的内径理想的是正圆的直径Rs。但是,如后述那样,在组合多个铁芯100Sp制造定子100S时,定子100S的内周面有可能成为相对于正圆变形了的形状。
图5表示本实施方式的转子100R的结构例子。转子100R具备在转子铁芯100C的外周面在周方向上排列的多个永磁铁100M。在本例子中,永磁铁100M的厚度是t,转子100R的直径是Rf。
图6是示意地表示因制造偏差而在分割定子的内周面产生的变形的图。在图示的例子中,隔着中心轴对称地配置的6组定子齿的间隔分别是R1、R2、R3、R4、R5、R6。在没有制造偏差的理想的情况下,R1=R2=R3=R4=R5=R6成立。但是,现实是由于制造偏差,R1~R6可能取分别不同的值,因此产生2次的齿槽转矩,最终转矩脉动的2次谐波分量(2次转矩脉动)变大。
根据本发明人的研究,在制造偏差的结果是定子100S的内径的最小值或最大值相对于内径的平均值具有0.09%以上的差异的情况下,出现2次转矩脉动。因此,本实施方式的电动机控制能够适用于定子100S的内径的最小值或最大值相对于内径的平均值具有0.09%以上的差异的电动机。
另外,也可以针对2次转矩脉动的振幅是平均转矩的0.7%以上的电动机,进行2次谐波电流的重叠。
<电动机系统的其他结构例子>
参照图7说明本发明的电动机系统的非限定性的示例性的其他实施方式。在图示的例子中,本实施方式的电动机系统1000具备具有转子100R和定子100S的永磁铁同步电动机100、用于测定或推定转子100R的位置的位置传感器120、控制永磁铁同步电动机100的电动机控制装置300。位置传感器120的典型例子是霍尔元件或霍尔IC等磁传感器、转子编码器、分解器(resolver)。位置传感器120不是不可缺的,可以采用无传感器地推定转子100R的位置的结构。
电动机控制装置300具备通过公知的向量控制确定0次电流(d轴0次电流i
第三电路30将把d轴N次谐波电流i
电动机控制装置300还具备进行UVW/dq变换的第一变换电路50、进行dq/UVW变换的第二变换电路60、逆变器70、以及将位置传感器120的输出所示的机械角(θm)变换为电角(θe)的电路80。第一变换电路50根据d轴电压指令值v
可以通过集成电路装置实现第一电路10、第二电路20、第三电路30、向量控制电路40、第一变换电路50、以及第二变换电路60等构成要素的一部分或全部。典型的是可以通过一个或多个半导体部件形成这样的集成电路装置。
参照图8说明上述的集成电路装置的例子。图8示例的集成电路装置500具备信号处理处理器520、存储器540。存储器540存储使信号处理处理器520执行以下的处理的程序。
·确定d轴0次电流和q轴0次电流的处理
·根据转子的位置确定d轴N次谐波电流和q轴N次谐波电流的处理
·将把d轴N次谐波电流重叠到d轴0次电流所得的值、以及把q轴N次谐波电流重叠到q轴0次电流所得的值,分别确定为d轴电流指令值和q轴电流指令值的处理
与不进行高频重叠的情况相比,d轴N次谐波电流的振幅i
该集成电路装置500具备将来自位置传感器120的模拟信号变换为数字信号的A/D变换器560、将来自用于检测流过电动机100的绕组的电流的传感器(未图示)的模拟信号变换为数字信号的A/D变换器580。
本例子中的集成电路装置500输出向逆变器70提供的PWM信号。逆变器70的至少一部分也可以包含在集成电路装置500中。典型的是,通过在一个封装内将一个或多个半导体芯片相互连接起来,而实现这样的集成电路装置500。可以通过将本发明特有的程序例如写入到通用的微控制器单元(MCU)中,来实现集成电路装置500的一部分或全部。
<电动机控制方法的例子>
参照图9说明本发明的电动机控制方法的实施方式。
首先,在步骤S1中,接受电流指令值或转矩指令值等指令值以及传感器检测值,确定d轴0次电流和q轴0次电流。在确定时,也可以使用使各种指令值和传感器检测值与d轴0次电流和q轴0次电流的指令值关联起来的表。可以将这样的表记录到电动机控制装置300内置的存储器95等中。例如,可以根据电流指令值、转矩指令值、电动机转速、电动机施加电压等,确定d轴0次电流和q轴0次电流各自的大小。另外,也可以根据从未图示的速度控制器输出的速度指令和实际速度等,确定d轴0次电流和q轴0次电流各自的大小。
在步骤S2中,根据转子的位置确定d轴N次谐波电流和q轴N次谐波电流。在该步骤S2中,确定d轴N次谐波电流的振幅i
可以离线地测定齿槽转矩的振幅,根据该测定值计算出N次谐波电流的振幅。另外,也可以扫描N次谐波电流的振幅,使电流实际流过电动机,对每个电动机确定问题次数的转矩脉动小于预定水平以下的振幅。这样,在电动机系统的出厂前确定应该重叠的N次谐波电流的相位和振幅,将规定这些相位和振幅的数据记录到存储器中。在步骤S2中,针对电动机动作从存储器读出这样的数据,确定d轴N次谐波电流的振幅i
在步骤S3中,将把d轴N次谐波电流重叠到d轴0次电流所得的值、把q轴N次谐波电流重叠到q轴0次电流所得的值分别确定为d轴电流指令值和q轴电流指令值。
并且,在步骤S4中,根据d轴电流指令值和q轴电流指令值,确定d轴电压指令值和q轴电压指令值。
在步骤S5中,根据d轴电压指令值和q轴电压指令值,确定UVW相各自的电压指令值。
这样的电动机控制的结果是电动机的转矩脉动的N次谐波分量的振幅变得比齿槽转矩的N次谐波分量的振幅小。
此外,在本发明的实施方式中,为了降低因制造偏差造成的转矩脉动以外的目的,例如为了降低6次的径向力,例如也可以追加地重叠6次谐波电流。
<实施例>
针对图4和图5所示的具备定子100S和转子100R的8极12槽结构的表面磁铁型的电动机100,实施本发明的实施方式的电动机控制方法。
图10是表示针对定子的内径的最小值或最大值相对于内径的平均值只有小于0.09%的差异的电动机(普通模型)得到的转矩的振幅与电角次数的关系的图表。转速是每分钟1000转。虽然产生了6次转矩脉动,但2次转矩脉动小得可以无视。
图11是表示针对因制造偏差而定子的内径的最小值或最大值相对于内径的平均值显示出0.09%以上的差异的电动机(偏差模型)得到的转矩的振幅与电角次数的关系的图表。平均转矩和转速与图10的例子相同。在该例子中,产生了比6次转矩脉动大的2次转矩脉动。
图12是表示在使图11的电动机动作时将2次谐波电流重叠到q轴电流以便抵消2次转矩脉动的情况下得到的转矩的振幅与电角次数的关系的图表。“抵消”所需要的q轴2次谐波电流的振幅是q轴0次电流的振幅的1/100~1/50左右。其结果是,2次转矩脉动的振幅与6次转矩脉动的振幅相比充分小。具体地说,2次转矩脉动的振幅比平均转矩的0.6%小。
图13是表示针对“偏差模型”和“普通模型”不进行2次谐波电流的重叠的情况下的转矩的时间变化的图表。图14是表示针对“偏差模型”不进行2次谐波电流的重叠的情况下的转矩的时间变化、针对“偏差模型”进行2次谐波电流的重叠的情况(重叠模型)下的转矩的时间变化的图表。
如根据图13和图14可知的那样,通过将2次谐波电流重叠到q轴电流,对于“偏差模型”,实现了与“普通模型”同样小的2次转矩脉动。
图15是表示不将2次谐波电流重叠到q轴电流的情况下的2次转矩脉动(虚线)、将2次谐波电流重叠到q轴电流时的2次转矩脉动(实线)的图表。高频电流重叠的效果是清楚的。
在该实施例中,通过将2次谐波电流重叠到q轴电流,抵消了因定子内径从正圆偏离而产生的齿槽转矩。在抵消因永磁铁的厚度的偏差而产生的齿槽转矩时,向q轴电流重叠3次谐波电流即可。可以离线地确定重叠的谐波电流的相位和振幅,使得在各个电动机中实际产生的转矩脉动充分小。
本发明的制造电动机系统的方法在某示例的实施方式中,包括:准备多个永磁铁同步电动机(特别是具备分割定子的表面磁铁型电动机)的工序;针对上述多个电动机,分别测定齿槽转矩和/或转矩脉动的振幅的工序;针对上述振幅超出了预定值(平均转矩的例如0.7%)的电动机,确定降低转矩脉动的振幅的谐波电流的相位和振幅的工序;将由所确定的相位和振幅规定的数值(数值的组或表)存储到用于上述电动机的电动机控制装置的存储器中的工序。
本发明的电动机控制装置和控制方法、以及电动机系统通过电流控制降低电动机的转矩脉动,因此能够广泛地适用于要求降低振动或噪声的各种永磁铁同步电动机、以及具备永磁铁电动机的装置或系统。
符号说明
10:第一电路;20:第二电路;30:第三电路;40:向量控制电路;50:第一变换电路;60:第二变换电路;70:逆变器;90:处理器;95:存储器;100:永磁铁同步电动机;100S:定子;100R:转子;120:位置传感器;300:电动机控制装置;500:集成电路装置;1000:电动机系统。
- 电动机控制装置、具备该电动机控制装置的电动机单元、具备电动机单元的汽车以及电动机控制方法
- 电动机控制系统、电动机控制装置、无刷电动机以及电动机控制方法