工程运输环境下路径识别方法及装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及工程运输车智能控制系统领域。更具体地说,本发明涉及一种工程运输环境下路径识别方法及装置。
背景技术
工程运输环境下的工况变化剧烈,熟练的驾驶员会根据前方路况,预判式的、持续的的修正操作指令,如加减挡、加减速、手动操纵开关等,使整个运输过程平顺、高效。
随着现有工程运输车的自动化程度越来越高,很多原来由驾驶员操作的指令,都逐步实现自动控制,但现有整车控制系统基本都属于实时控制系统,即根据整车的实时状态经过不同的控制算法,实时输出控制指令,由于没有驾驶员对路况的预判环节,导致其行驶过程的连贯性不佳。
发明内容
本发明的一个目的是提供一种工程运输环境下路径识别方法,以识别车辆的行驶路径。
本发明的又一个目的是提供一种工程运输环境下路径识别方法,以用于车辆的智能控制,使整车控制系统能够预知路况,预判式的输出控制指令,进而提高车辆行驶过程的连贯性。
为了实现根据本发明的目的和其它优点,提供了一种工程运输环境下路径识别方法,包括:
S02、获取当前路径点、当前路径和历史路径;
S04、判断所述当前路径点是否在所述历史路径上,若是,进入S06,否则,返回,重新判断;
S06、判断所述当前路径上自所述当前路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径与所述历史路径为同一路径,否则,认定所述当前路径与所述历史路径为不同路径。
优选的是,所述的工程运输环境下路径识别方法,S02中,在获取当前路径和历史路径之前,还包括,当车辆行驶速度V>=V
优选的是,所述的工程运输环境下路径识别方法,S04中,判断所述当前路径点是否在所述历史路径上,具体包括,S41、判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,若是,则逐个计算所述当前路径点与所述历史路径中索引值为[Index-a,Index+b]的历史路径点的距离D
优选的是,所述的工程运输环境下路径识别方法,S41中,判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,具体包括,判断所述当前路径上自所述当前路径点的上一个路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径点上一时刻路径与所述历史路径为同一路径,否则,认定所述当前路径点上一时刻路径与所述历史路径为不同路径。
本发明还提供了一种工程运输环境下路径识别方法装置,包括,
获取模块,其用于获取当前路径点、当前路径和历史路径;
第一判断模块,其与所述获取模块连接,用于判断所述当前路径点是否在所述历史路径上;
第二判断模块,其与所述第一判断模块连接,用于在所述第一判断模块认定所述当前路径点在所述历史路径上后,判断所述当前路径上自所述当前路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径与所述历史路径为同一路径,否则,认定所述当前路径与所述历史路径为不同路径。
优选的是,所述的工程运输环境下路径识别装置,还包括,存储模块,其与所述获取模块连接,用于当车辆行驶速度V>=V
优选的是,所述的工程运输环境下路径识别装置,第一判断模块中,判断所述当前路径点是否在所述历史路径上,具体包括,S41、判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,若是,则逐个计算所述当前路径点与所述历史路径中索引值为[Index-a,Index+b]的历史路径点的距离D
优选的是,所述的工程运输环境下路径识别装置,S41中,判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,具体包括,判断所述当前路径上自所述当前路径点的上一个路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径点上一时刻路径与所述历史路径为同一路径,否则,认定所述当前路径点上一时刻路径与所述历史路径为不同路径。
本发明还提供了一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行上述方法。
本发明还提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时,实现上述方法。
本发明至少包括以下有益效果:
第一、工程运输环境下,车辆的行驶路径具有运输距离短、重复性强、路况变化剧烈等特点。本发明通过对车辆行驶路径进行存储和识别,使整车控制系统能够预知路况,预判式的输出控制指令,比如预判式换挡,预判式加、减速等,进而提高车辆行驶过程的连贯性,此外,对新能源车辆的电池能量管理策略优化也起到积极的作用,为工程运输车的智能化,无人化提供了基础。
第二、本发明还可以实现,整车控制系统对历史路径下整车状态数据集进行分析,不断优化控制输出指令,达到控制指令集的“自学习”功能。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
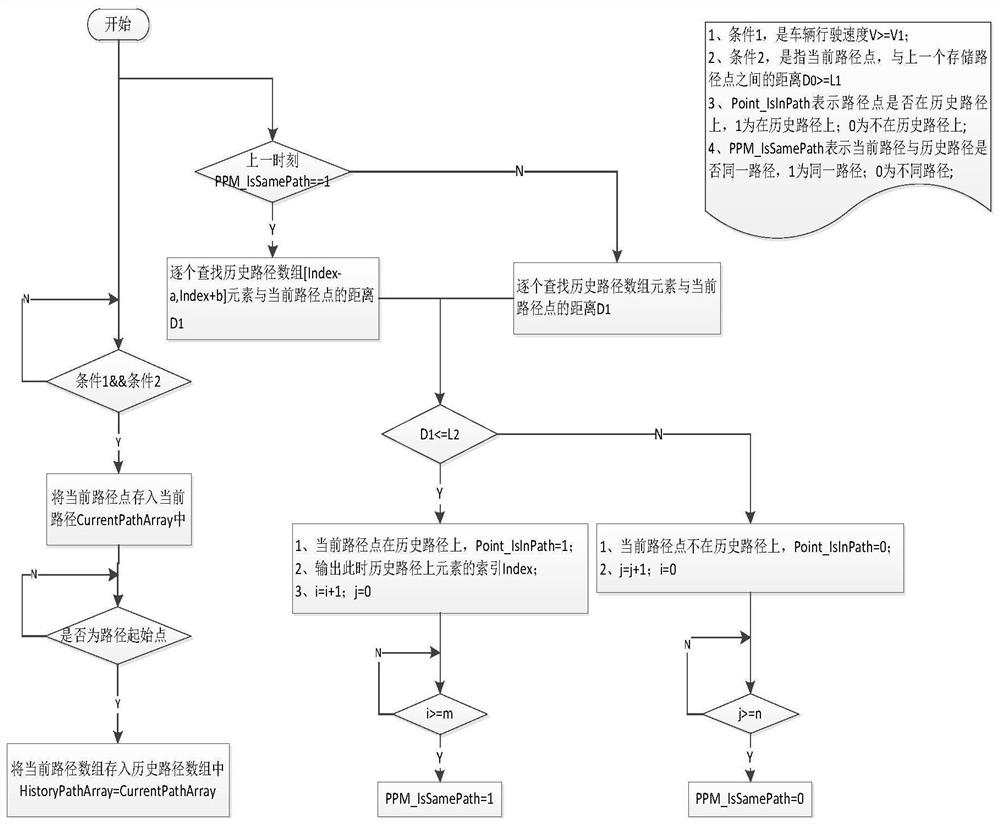
图1是根据本发明一个实施例的工程运输环境下路径识别方法流程图;
图2是根据本发明一个实施例的工程运输环境下路径识别装置示意图。
具体实施方式
下面结合实施例和附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得;在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,本发明提供一种工程运输环境下路径识别方法,包括:
S02、获取当前路径点、当前路径和历史路径;
S04、判断所述当前路径点是否在所述历史路径上,若是,进入S06,否则,返回,重新判断;
S06、判断所述当前路径上自所述当前路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径与所述历史路径为同一路径,否则,认定所述当前路径与所述历史路径为不同路径。
在上述技术方案中,路径点是由全球定位导航设备提供的经、纬度数据,当前路径是当前行驶路径上所有路径点的合集,具体表现为包含当前行驶路径上所有路径点经、纬度数据的数组,历史路径是历史行驶路径上所有路径点的合集,具体表现为包含历史行驶路径上所有路径点经、纬度数据的数组,进一步的,历史路径是在车辆满足一定的行驶条件时,将当前路径赋值给历史路径获得。具体的,对工程运输环境下的路径进行识别时,首先需要获取当前路径点、当前路径和历史路径,然后判断当前路径点是否在历史路径上,若当前路径点在历史路径上,再判断当前路径上自当前路径点起的连续多个路径点是否在历史路径上,若连续多个路径点在历史路径上,则认定当前路径与历史路径为同一路径,否则,认定当前路径与历史路径为不同路径,进一步的,若当前路径上自当前路径点起的连续m个路径点在历史路径上,则认定当前路径与历史路径为同一路径,若当前路径上自当前路径点起的连续n个路径点不在历史路径上,则认定当前路径与历史路径为不同路径,m、n取值应根据实际标定过程最终确定,初值可取m=3,n=4。
工程运输环境下,车辆的行驶路径具有运输距离短、重复性强、路况变化距离等特点,本发明通过车辆的行驶路径进行存储和识别,使整车控制系统可以根据所存储的历史路径,以及车辆当前在历史路径中的位置,明确后续路径的变化趋势,实现“路况预知”功能,以在路况变化之前,提前对整车状态进行调整,避免在路况变化时由于系统的迟滞性导致的车辆的不连贯运行情况出现,最终使整个运输过程更加平顺、高效,同时,整车控制系统还能实现对历史路径下整车状态数据集进行分析,不断优化控制输出指令,达到控制指令集的“自学习”功能。
在另一技术方案中,所述的工程运输环境下路径识别方法,S02中,在获取当前路径和历史路径之前,还包括,当车辆行驶速度V>=V
在另一技术方案中,所述的工程运输环境下路径识别方法,S04中,判断所述当前路径点是否在所述历史路径上,具体包括,S41、判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,若是,则逐个计算所述当前路径点与所述历史路径中索引值为[Index-a,Index+b]的历史路径点的距离D
在另一技术方案中,所述的工程运输环境下路径识别方法,S41中,判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,具体包括,判断所述当前路径上自所述当前路径点的上一个路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径点上一时刻路径与所述历史路径为同一路径,否则,认定所述当前路径点上一时刻路径与所述历史路径为不同路径。这里,列举了一种判断当前路径点上一时刻路径与历史路径是否为同一路径的具体方法,具体的,根据当前路径上自当前路径点的上一个路径点起的连续多个路径点是否在历史路径上进行判断,进一步的,若当前路径上自当前路径点的上一个路径点起的连续m个路径点在历史路径上,则认定当前路径点上一时刻路径与历史路径为同一路径,若当前路径上自当前路径点的上一个路径点起的连续n个路径点不在历史路径上,则认定当前路径点上一时刻路径与历史路径为不同路径,m、n取值应根据实际标定过程最终确定,初值可取m=3,n=4。
如图2所示,本发明还提供了一种工程运输环境下路径识别方法装置,包括,
获取模块,其用于获取当前路径点、当前路径和历史路径;
第一判断模块,其与所述获取模块连接,用于判断所述当前路径点是否在所述历史路径上;
第二判断模块,其与所述第一判断模块连接,用于在所述第一判断模块认定所述当前路径点在所述历史路径上后,判断所述当前路径上自所述当前路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径与所述历史路径为同一路径,否则,认定所述当前路径与所述历史路径为不同路径。
在另一技术方案中,所述的工程运输环境下路径识别装置,还包括,存储模块,其与所述获取模块连接,用于当车辆行驶速度V>=V
在另一技术方案中,所述的工程运输环境下路径识别装置,第一判断模块中,判断所述当前路径点是否在所述历史路径上,具体包括,S41、判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,若是,则逐个计算所述当前路径点与所述历史路径中索引值为[Index-a,Index+b]的历史路径点的距离D
在另一技术方案中,所述的工程运输环境下路径识别装置,S41中,判断所述当前路径点上一时刻路径与所述历史路径是否为同一路径,具体包括,判断所述当前路径上自所述当前路径点的上一个路径点起的连续多个路径点是否在所述历史路径上,若所述连续多个路径点在所述历史路径上,则认定所述当前路径点上一时刻路径与所述历史路径为同一路径,否则,认定所述当前路径点上一时刻路径与所述历史路径为不同路径。
本发明还提供了一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行上述方法。
本发明还提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时,实现上述方法。
上述装置、电子设备和存储介质是基于与工程运输环境下路径特征提取方法相同的发明构思得到,具体可参考方法部分的描述。
实施例1:
如图1所示,本发明提供了一种工程运输环境下路径识别方法,主要包含路径点的存储方法和路径识别方法。
1、所述路径点,是指由全球定位导航设备提供的经、纬度数据;
2、所述路径点的存储方法,是同时满足条件1和条件2时,将当前路径点存储进当前路径(数组)中;
3、所述条件1,是指车辆行驶速度V>=V
4、所述条件2,是指当前路径点,与上一个存储路径点之间的距离D
5、所述当前路径(数组),是指当前路径点存储的合集;
6、所述路径识别方法,首先判断当前路径点是否在历史路径(数组)上,之后判断当前路径(数组)与历史路径(数组)是否为同一路径,以及输出当前路径点在历史路径(数组)上的位置索引Index;
7、所述历史路径(数组),是指在满足条件3时,将当前路径(数组)赋值给历史路径(数组);
8、所述条件3,是指整车控制系统能综合判断出运输路径的起始点的条件,比如工程运输车中,货箱举升信号可以作为起始点的判断条件之一;
9、所述判断当前路径点是否在历史路径(数组)上的方法是,首先判断当前路径点上一时刻路径是否与历史路径为同一路径,如果为不同路径,则逐个计算当前路径点与历史路径数组中所有点的距离为D
10、所述条件4,是指计算距离D
11、所述判断上一时刻是否为同一路径的方法,是在上一时刻,判断当前路径是否与历史路径为同一路径,方法是判断连续m个路径点在历史路径数组上,则认定当前路径与历史路径为同一路径;若连续n个路径点不在历史路径数组上,则认定当前路径与历史路径为不同路径;m、n取值应根据实际标定过程最终确定,初值可取m=3,n=4。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 工程运输环境下路径识别方法及装置
- 工程运输环境下路径特征提取方法及装置