一种应用于机器人直线关节的关节电机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于机器人动力应用领域,具体实现机器人直线运动关节的动力功能。
背景技术
目前市面上的活塞电机多为两个电磁铁的往复式电机,移动距离和精度不可调。而精度可调的音圈电机价格超贵并且输出动力及其有限,都无法实现六足机器人的腿部行走功能。而使用旋转电机总会有超多的机械传动结构,增加了行走机器人的腿部结构复杂度,并且旋转电机在转换为直线运动的过程中,移动还不是线性的,不便于控制。
发明内容
针对以上局限性,本发明提出了一种精度和行程均可控的往复式活塞电机,其原理是依据永磁体的转子和铁芯线圈的定子构成的电机原理。
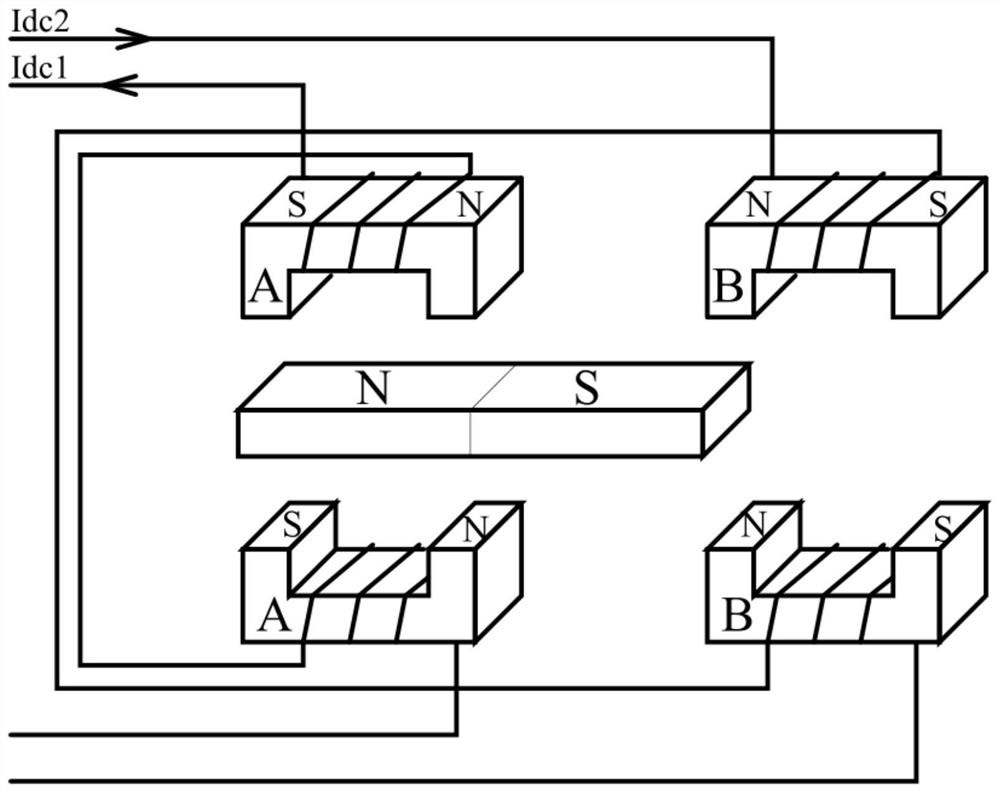
一对铁芯线圈和一个永磁体的结构如图1所示,条形永磁体是左N右S,铁芯线圈的绕线是顺向串联的,也就是通电后它们产生的磁极方向是一致的,如都是左N右S或都是左S右N。
当给线圈接通图2所示负向电流后,根据线圈电流和磁极的关系可知,铁芯线圈产生的磁极是左S右N。由图2可知此时的永磁体是被上下铁芯线圈吸引的,上下的线圈分别与永磁体形成了各自的磁回路,永磁体不会左右移动,顶多因为上下的受力不均匀被吸引到上面的铁芯线圈,或者被吸引到下面的铁芯线圈。
当给图1所示的铁芯线圈接上正向电流后,铁芯线圈的磁极变成了左N右S,则因为同性磁极排斥的原因永磁体会产生移动,并且有三种可能的移动方式。
一是永磁体被推离原来的位置向右运动,如图3(a)所示,因为右边的铁芯磁极与永磁体左边的磁极不同会产生吸引,永磁体会被吸引在铁芯右侧的中间,或者因为上下受力不均匀被吸向右上或右下。
二是永磁体被推离原来的位置向左运动,如图3(b)所示,因为左边的铁芯磁极与永磁体右边的磁极不同会产生吸引,永磁体会被吸引在铁芯左侧的中间,或者因为上下受力不均匀被吸向左上或左下。
三是永磁体在移动的过程中被铁芯线圈左右旋转了180度,然后吸引在了上或下边的铁芯上,这种不属于本发明的需要应用的情况,未画出图示。
从第一二种情况可以知道,当图1所示的铁芯线圈和永磁体所组成的结构在条件满足时,永磁体是会产生左移或右移的,对于上下铁芯不均匀吸引的现象不属于本发明应用,以下将不予提及。
从前述分析可知,永磁体直线移动的条件是:一对铁芯线圈的中间放置一个条形永磁体;永磁体的磁极分为左右两端,线圈极化磁极在左右两端;需要改变电流方向。
根据上述分析结果设计了图4所示的双线圈组结构,能够使条形永磁体作直线运动。A、B铁芯线圈组的特性相同,包括电器特性和尺寸特性;铁芯线圈组(以下简称线圈组)内的上下两个铁芯线圈的尺寸特性和电器特性也是相同的;永磁体是条形且薄的长方体形永磁体,且磁极是左N右S;A、B线圈组之间的间距等于线圈铁芯的外侧长度L;永磁体的长度等于线圈长度的两倍即2L;A、B线圈组内的铁芯宽度、永磁体的宽度完全相等均为W。
运动过程如下。
Idc1为负电流,Idc2为负电流时,A、B线圈组的磁极如图4所示都是左S右N,A线圈组产生的磁极与永磁体磁极相反,于是永磁体被吸引在了A线圈组的中间,即图4中的位置,该位置定义为永磁体向右移动的起点。
Idc1为负电流,Idc2为正电流时,如图5所示。仅B线圈组的磁极翻转为左N右S,永磁体的右端S极同时被A、B线圈组的N极吸引,而永磁体的左端N仅有A线圈组的S极吸引。所以永磁体会被B线圈组的N极拉动到自身磁极附近,即图5中的永磁体的位置,永磁体的S极处于A、B线圈组的N极的中间,永磁体向右移动了A、B线圈组间距L的一半。
Idc1为正电流,Idc2为正电流时,如图6所示。仅A线圈组的磁极翻转为左N右S。由于永磁体右端S被B线圈组的N极吸引着的,则A线圈翻转后左端的N极会推着永磁体右移,使得永磁体左端的N极被A线圈组的右端的S极吸引,而永磁体的S极被B线圈组左端的N极吸引。则永磁体正好被吸引到A、B线圈组的中间位置,永磁体继续被右移了A、B线圈组间距L的一半。
Idc1为正电流,Idc2为负电流时,如图7所示。仅B线圈组的磁极翻转为左S右N。永磁体左端的N极同时被A、B线圈组的S极吸引,而永磁体的右端的S极则被B线圈的右端的N极吸引。永磁体左端的N极被A、B线圈组的S极吸引在了A、B线圈组的中间。永磁体被继续右移了A、B线圈组间距L的一半。
Idc1为负电流,Idc2为负电流时,如图8所示,仅线圈A的磁极翻转为左S右N,此时可以发现电流方向变化为最初的图4中的位置,即Idc1、Idc2均为负电流。由于A线圈组的右端的磁极为N与永磁体的左端磁极N产生排斥,而B线圈组的磁极正好与正对着的永磁体磁极相反,所以永磁体被B线圈组吸引到了自身铁芯的正中间。永磁体的磁极中线是在B线圈组的边沿位置,被B线圈组吸引到中心位置的,也就是永磁体继续被右移了铁芯长度L的一半。
事实上,图5到图8所示的电流翻转移动永磁体的过程,就是使永磁体从A线圈组向右平移到B线圈组的过程,类似于步进电机的移动。从上述移动过程知道,永磁体在一定的条件下是可以被线圈磁极以步进的方式做直线运动的。
以下将分析用此原理构成的活塞电机,及其工作原理。
活塞电机的每组线圈中有4对磁极,以电机径向叠加于同一圆轴上,而每对磁极的N极到S极的连线都平行于电机的轴心线。
线圈组中的单个磁极结构如图9所示,其中图9(a)是铁芯线圈的侧视图,图9(b)是将铁芯展平后的侧视图,图9(c)是铁芯展平后的顶视图。
图9(a)是一个U型铁芯线圈,磁极被线圈约束在了U型铁芯的两端,U型铁芯的宽度是D。当沿着图9(a)所示的折角位置将U型铁芯展开后,得到图9(b)所示的条形铁芯线圈,可以看到线圈在U型铁芯的两端是连续绕线且方向一致的。当从图9(b)的顶视图中看下去,展平后的图9(a)就是图9(c)所示的形状。
结合图9(b)和图9(c)可知,图9(a)所示的磁极是弧形磁极且具有图9(b)所示的磁极高度H,线圈的绕向是连续的且顺向串联在一起的。当线圈通电后磁极在两个弧形磁极上形成了一对磁极且对外呈现磁性。
活塞电机的一组完整的线圈如图10所示,在正方形载片的圆周上呈90度排列了4对磁极,且每对磁极都具有图9所示的结构,它们被完全固定在载片中。4对磁极的线圈都是顺向串联的,所以对外仅有一组引线A+端和A-端。当给图10所示的铁芯线圈组通电后,它们的铁芯磁化极性是一致的。
线圈组固定后的载片效果如图11所示,4对U型铁芯线圈被分置于载片的圆周方向且均分为90度位置,而磁极则处于载片的上下的位置,也就是磁化后磁极要么是上S下N,要么是上N下S,载片的厚度就是图9(a)所示的D。图11所示的导向槽是活塞电机缸体为防止永磁体活塞旋转而设计的。
在图11中的下层还有一个隔离片,是一个非导磁材料的隔离片,专门用于间隔载片的,其厚度也等于D,也具有导向槽功能。当图11所示的上层载片和下层隔离片叠加后,其厚度(2*D)就是活塞电机的一个最小定子单元的一半。活塞电机的一个最小定子单元的另一半的结构完全与图9~图11相同。
活塞电机的一个最小定子单元如图12所示,载片A是A线圈组,载片B是B线圈组,隔离片A和B都是一样的非导磁材料且具有导向槽。当多个最小定子单元顺向重叠在一起后就组成了活塞电机的定子的缸体结构,具备了使永磁体做活塞运动的条件。
当很多个最小定子单元顺向重叠时,载片A的线圈顺序串联后,其首端和尾端引出作为A线圈的两个驱动端A+和A-,同样,载片B的线圈顺序串联后,其首端和尾端引出作为B线圈的两个驱动端B+和B-。
如图13是由2个最小定子单元组成的活塞电机定子线圈接线图,A组线圈A1、A2顺序串联后引出驱动端DR_A+、DR_A-,B组线圈B1、B2顺序串联后引出驱动端DR_B+、DR_B-。同时A1和B1是定子单元1中的线圈、A2和B2是定子单元2中的线圈。
活塞电机的活塞由多个永磁体叠加而成,每个最小活塞单元的上层永磁体和下层隔离片展开后如图14所示。为了防止活塞旋转将活塞的永磁体做成了4个独立的磁回路,均匀分布在导向孔为坐标原点的4个象限内,由4个导轨分隔为90度的区域内布局,与缸体上的4对线圈磁极共同限制活塞旋转。导轨也是防止活塞旋转的。
4个永磁体都是弧形永磁体,且磁极呈轴向分布即上N下S,弧形内侧的磁路由铁芯提供,弧形外侧的磁路由空气隙提供。但是当活塞和缸体组装后,外侧的磁路由缸体上的铁芯线圈提供,气隙仅占极小的部分。为了使活塞可以在缸体中运动,导轨的高度(图14中的h)小于导向槽的深度(图11中的d),且导轨的宽度(图14中的m)小于导向槽(图11中的w)的宽度,以提供一定的余量使活塞可以自由在缸体中移动。图14叠加后的效果如图15所示。
图16是一个活塞电机的剖面图,由活塞和缸体组成,活塞由3个最小永磁单元组成,缸体由2个最小定子单元组成,活塞上的永磁体在缸体的定子线圈的磁极翻转的推动下,可以在缸体内做可控往复运动。以下将介绍各部分名称及功能。
螺栓孔,是活塞体上对外输出动力时连接螺栓的安装孔,是丝孔。活塞体是一个顶部中空,下端填充永磁体的组合结构件。
机械限位,活塞沿着导向轴运动到顶端的机械限位装置时,防止活塞滑出导向轴的顶端。机械限位和顶缓冲是固定在导向轴上的,而导向轴是固定在缸体底部的,从而起到限位作用。
顶缓冲,活塞运动到顶部时的缓冲弹簧,弹簧套在导向轴上,其上端固定在机械限位上,下端面向活塞的铁芯部分。
上限位和下限位,是两个霍尔传感器,是活塞运动行程及位移距离的检测传感器,同时也是活塞上下运动时的电子限位传感器。两个传感器的安装位置相对于永磁体磁极有90度的物理相差,通过对活塞体上的永磁体的磁极进行组合检测,完成对活塞体位移的方向和距离的精准检测。
线圈磁极,最小定子单元共有2个,图16所示的活塞体的左右两侧的缸体内壁上的铁芯线圈的磁极,磁极间距最外侧间距是D。图示位置只能看到1个载片的1/2部分,即图示左右两侧上的“线圈磁极”,但它们其实是4对磁极,因为图16是个剖面图。
导向槽,共有4个在缸体内壁上的导向槽,图示位置能看到左右两个导向槽(为了便于画图示意,将活塞的直径进行了适当的缩小),活塞体的导轨在导向槽中滑行时,可以限制活塞体做旋转运动。导向槽是对活塞运动进行导向,等于活塞导轨长度的1.5倍,即1.5*16D=24D。
导轨,在活塞体上共有4个导轨,分90均匀布局在导向孔的四周,与导向槽配合完成限制活塞旋转的功能。导轨长度等于活塞永磁体总长度即16D。
缸体,活塞电机的所有定子部件的安装外壳,缸体长度大于等于导向槽的长度。
活塞体,活塞电机的所有动态部件的安装部件,其长度大于导向槽的长度,即大于24D。
导向轴,固定于缸体底部的圆柱形部件,主要功能是限制活塞上下移动时的摆动幅度。导向轴的外径小于导向孔的内径,使得活塞体可以在导向轴上上下移动,并被限定了径向移动的偏心幅度。导向轴的长度大于导向槽的长度即大于24D。
导向孔,实现活塞体在导向轴上移动的功能。
铁芯,为弧形永磁体提供内部的磁路功能。铁芯的内壁就是导向孔,外壁作为弧形永磁体的安装位置及磁通路。
永磁N/S极,永磁体的磁极排列位置,每一层永磁体都由与铁芯线圈相对应的4个永磁体组成,它们呈90度分布于导向孔的圆周方向上。永磁体的磁极之间的厚度等于线圈磁极宽度的2倍即2D。
底缓冲,活塞运动到底部时的缓冲弹簧,弹簧套在导向轴上,其上端面向活塞的铁芯,下端固定在缸体底部。
顶缓冲和底缓冲的另一个重要功能是:在活塞做高速满程往复运动时,弹簧可以将活塞的惯性能量转换为换向初始动能,起到节约电能的作用,同时提高活塞的初始速度。
以下将叙述活塞电机的工作过程。
图16的活塞电机的A1、A2、B1、B2载片对应的磁极如图17所示,其磁极是可变的,从下到上第一组最小单元是A1/B1,第二组最小单元是A2/B2,线圈接线图如图13所示。永磁体磁极如图17的右侧所标示的磁极,是固定不变的,从下到上各层永磁体的编号分别是M1~M3。
A载片电流Ia、B载片电流Ib满足图17所示的电流向右为正方向。
传感器的输出信号分别为Top_Senser、Btm_Senser,它们相差90度。当Top_Senser超前Btm_Senser为90度时表示活塞向上运动,当Top_Senser落后Btn_Senser为90度时表示活塞向下运动。
按照图17所示的线圈磁极和永磁体的对应:A1的S极正对M2的N极,A1的N极正对M2的S极;B1正对永磁体之间的非导磁材料,无作用力;A2的S极正对M3的N极,A2的N极正对M3的S极;B2正对永磁体之间的非导磁材料,无作用力。
继续图17,当接通电流Ia、Ib均为正电流时。由于A1正对M2且磁极吸引,A2正对M3且磁极吸引,永磁体被吸引而固定在图示位置。设此时活塞上升运动的起点为0,如图中右上角的S轴坐标所示。S坐标每刻度为线圈磁极间距D,起点以活塞顶部螺栓孔平面为起点。
Ia为正电流,Ib为负电流,则线圈磁极如图18所示。由于B1的磁极翻转为上N下S,则B1的S极会吸引M2上侧的N极;同时M2的N极同时被A1、B1的S极吸引,而M2的S极只被A1的N极吸引;所以M2受到B1向上拉的力。同理可得M3的N极也会受到B2向上的拉力,永磁体活塞因M2、M3同时向上拉而上移。上移的位移是半个线圈磁极的高度,即0.5D,如图18活塞顶端对应的S坐标向上移动了0.5D。
Ia为负电流,Ib为负电流,则线圈磁极如图19所示。由于A1的磁极翻转为上N下S,则A1的S极会排斥M2的S极,A1的N极吸引M2的S极;则M2的N极和S极分别正对着B1的S极和A1的N极;所以M2受到向上拉力,同时A1的S极对M2的S形成了向上的推力,所以M2会上移。同理可得M3也会被向上推,永磁体活塞因M2、M3同时受到向上的力而上移。上移的位移是半个线圈磁极的高度,即0.5D,如图19活塞顶端对应到S坐标移动到了1D位置。
Ia为负电流,Ib为正电流,则线圈磁极如图20所示。由于B1的磁极翻转为上S下N,则B1的N极和A1的N极会吸引M2的S极,B1的S极吸引M2的N极;则M2因B1的磁极翻转而受到向上拉力,同时B1的S极对M2的N极也产生了吸力,所以M2会上移。同理可得M3也会被上移,永磁体活塞因M2、M3同时向上移动而上移。上移的距离仍然是半个线圈磁极的高度,即0.5D再次叠加到位移距离上,变成图19活塞顶端对应到S坐标已经移动到了1.5D位置。
Ia为正电流,Ib为正电流,则线圈磁极如图21所示。由于A1的磁极翻转为上S下N,则A1的S极排斥M2的S极,而B1的N极吸引M2的S极,而B1的S极吸引M2的N极,所以M2会上移。同理可得M3也会被上移,永磁体活塞因M2、M3同时向上移动而上移,上移的距离仍然是半个线圈磁极的高度,即0.5D再次叠加到位移距离上,变成图21活塞顶端对应到S坐标已经移动到了2D位置。
对比图17、图21所示的电流Ia、Ib的方向,以及铁芯线圈的磁极就会发现,此时的电流方向和磁极极性已经回到了最初位置,但是活塞却分为四步共上移了2D的距离,每次移动0.5D。如果继续电流Ia、Ib的组合换向,使得线圈A1、A2、B1、B2继续推动活塞向上运动,每次移动0.5D的距离,最终是可以将活塞顶部推进到8D的位置的。因为下面的M1最终会被推进到B1正对着的位置,共需要经过3个推进周期共3*2D位移,每个周期分四步,每步推进0.5D。加上之前已经上升的2D,共8D的距离。
从以上分析可知,线圈磁极长度为D时,各主要部件的参数为:
步进值为0.5D,一个周期分四步推进共可推进2D的距离;
A、B铁芯线圈之间的间距为D,每组铁芯线圈的总长度为2D,一个D的间距加一个铁芯的长度D;
A、B线圈的总长度等于4D,一个活塞电机的定子线圈总长度Lz应该为4D的整倍数,比如Lz=8D、12D、32D等;
缸体的导向槽长度等于3倍线圈总长度,即Lg=3*Lz;
活塞体上的导轨长度等于2倍线圈总长度,即Ld=2*Lz。
以上就是活塞电机的工作原理,由上可知它与步进电机的驱动是一样的,所以是可以直接用步进电机驱动活塞电机的。同时,上下传感器组成的相差90度的方波信号,可以准确的感知活塞的运动方向、位移距离以便于控制,使其应用于行走机器人的腿部作为动力时,可以更精确的得到控制和校正。
附图说明
附图1单永磁体和一对线圈组成的结构图
附图2线圈通电吸引永磁体示意图
附图3(a)永磁体被一对线圈右移;(b)永磁体被一对线圈左移
附图4单永磁体平移结构图-Idc1为负Idc2为负
附图5单永磁体平移结构图-Idc1为负Idc2为正
附图6单永磁体平移结构图-Idc1为正Idc2为正
附图7单永磁体平移结构图-Idc1为正Idc2为负
附图8单永磁体平移结构图-永磁体被右移了一个铁芯长度的位置
附图9(a)U型线圈侧视图;(b)U型线圈展平示侧视图;(c)U型线圈展平顶视图
附图10载片和U型线圈位置示意图
附图11最小定子单元的一半的拆解示意图
附图12最小定子单元
附图13活塞电机定子线圈的接线示意图
附图14活塞电机的最小活塞单元拆解示意图
附图15最小活塞单元
附图16活塞电机-剖面图
附图17活塞电机-运动起始点
附图18活塞电机-上移0.5D
附图19活塞电机-上移1.0D
附图20活塞电机-上移1.5D
附图21活塞电机-上移2.0D
附图22活塞电机应用于四足行走机器人-安装位置图
附图23活塞电机应用于四足行走机器人-控制原理图
附图24活塞电机应用于四足行走机器人-前进原理示意图
具体实施方式
图22是活塞电机应用于一款4足行走机器人的原理图,图中各部分功能如下。
控制台,包括整体的机械支撑框架和控制电路。
活塞电机,由缸体和活塞构成,缸体固定在控制台上的,活塞是可以运动的。支点A、B、C构成了一个三角形,活塞电机Mtr4的活塞是一个边AB边,缸体端口的支点B到杠杆支点C是一个边BC边(弧形边),杠杆支点C到活塞作用力点支点A是一个边CA边。
基于以上的△ABC的结构,以及三角形的AB边的距离是可变的,所以当AB的距离变化时会通过推动杠杆的A点使杠杆的阻力臂沿C点摆动,从而对减震球输出动力。
以相同结构的左前腿部关节电机Mtr1说明动力原理。
当活塞向外推出时,活塞属于△OPQ的OP边的距离增加,由于支点Q和O的存在,使得杠杆的PQ动力臂向缸体外的方向运动,通过杠杆支点Q传递到阻力臂QR时,阻力臂QR会向着缸体的方向运动,即图示减震球的运动轨迹Ly+所指的方向。
当活塞向内拉进时,活塞属于△OPQ的边OP的距离减小,由于支点Q和O的存在,使得杠杆的PQ动力臂向缸体内的方向运动,通过杠杆支点Q传递到阻力臂QR时,阻力臂QR会背离缸体的方向运动,即图示减震球的运动轨迹Ly-所指的方向。
图23是图22所示的四足行走机器人的电器控制图,主要由电池系统、步进驱动器、活塞电机、控制电路组成,以下分别介绍各部分功能。
电池系统,包括电池管理、电池、接口P1,接口P1是充电接口,外接充电电源,电池管理主要是充电管理、放电管理、电量显示,电池存储电能并释放电能。
步进驱动器,A~D共4个步进驱动器,它们的驱动信号后缀A~D对应各自的驱动器,步进电机的输出则对应Mtr1~Mtr4共4个活塞电机。
活塞电机,图23中的活塞电机编号Mtr1~Mtr4与图22中的活塞电机编号Mtr1~Mtr4是顺序对应的,以机器人的前后方向讲,左前是Mtr1、右前是Mtr2、左后是Mtr3、右后是Mtr4。
控制电路,主要包括DC/DC、驱动A~D的接口、MCU系统、传感器偏置电源、传感器A~D的接口。DC/DC提供MCU系统需要的各路低压电源,均是从电池的DC24V获取电能并经DC/DC转换后提供给MCU系统;驱动A~D接口是接插件,提供板上驱动A~D的信号的外接接口;MCU系统主要功能是运算、校正、处理和驱动;传感器A~D的接口接收活塞电机霍尔传感器的信号输出,传感器偏置电源也是从此接口输出的。
图22所示行走机器人的移动原理是:依据是长方体控制台的重心在对角线交点上,用对角同步交替移动的方式前进;Mtr1、Mtr3对地发力使控制台向前跳动一步然后Mtr2、Mtr4抬起脚;Mtr2、Mtr4对地发力使控制台向前跳动一步然后Mtr1、Mtr3抬起脚;对角线交替对地发力、抬脚,形成持续的向前行走的力。
初始化过程,活塞电机Mtr1~Mtr4都处于行程最高点,也就是图22中的OP边最长位置,此时控制台位置处于最低。信号逻辑分别是:[EN_A、EN_B、EN_C、EN_D]=[0000];[DIR_A、DIR_B、DIR_C、DIR_D]=[0000];[PUL_A、PUL_B、PUL_C、PUL_D]=[OFF/OFF/OFF/OFF]。传感器的输出都是静止的,没有变化信号。图24中的t0时刻,跳跃高度Jump为0,在地面Ground上的位移Move距离为0。
第一阶段:[EN_A、EN_B、EN_C、EN_D]=[1001];[DIR_A、DIR_B、DIR_C、DIR_D]=[1001];[PUL_A、PUL_B、PUL_C、PUL_D]=[ON/OFF/OFF/ON]。步进驱动器A驱动活塞电机Mtr1;步进驱动器B无输出;步进驱动器C无输出;步进驱动器D驱动活塞电机Mtr4。在图22中,Mtr1、Mtr4各自的活塞都开始缩短,Mtr2、Mtr3的活塞没有变。则机器人的左前脚和右后脚开始对地发力,而其右前脚和左后脚保持不变,机器人向前上方跃起。图24中所示的控制台高度曲线中的t0~t1时刻,机器人向前跃起。
第二阶段:当到达t1时刻时,进入第二阶段;[EN_A、EN_B、EN_C、EN_D]=[1001];[DIR_A、DIR_B、DIR_C、DIR_D]=[0000];[PUL_A、PUL_B、PUL_C、PUL_D]=[ON/OFF/OFF/ON]。步进驱动器A驱动活塞电机Mtr1使其活塞向外推;步进驱动器B无输出;步进驱动器C无输出;步进驱动器D驱动活塞电机Mtr4。在图22中,Mtr1、Mtr4各自的OP边都开始增加,Mtr2、Mtr3各自的OP边没有变。则机器人的左前脚和右后脚缩回,而其右前脚和左后脚保持不变,机器人依靠惯性呈抛物线下落。图24中的t1~t2时刻,机器依靠惯性前进。
第三阶段:图24中,当达t2时刻后,进入第三阶段;[EN_A、EN_B、EN_C、EN_D]=[0110];[DIR_A、DIR_B、DIR_C、DIR_D]=[0110];[PUL_A、PUL_B、PUL_C、PUL_D]=[OFF/ON/ON/OFF]。步进驱动器A无输出;步进驱动器B驱动Mtr2使其活塞向里拉;步进驱动器C使其活塞向里拉;步进驱动器D无输出。在图22中,Mtr1、Mtr4各自的OP边没有变,Mtr2、Mtr3各自的OP边都开始缩短。则机器人的左前脚和右后脚保持不变,而其右前脚和左后开始对地发力,机器人继续向前上方跃起。图24中的t2~t3时刻,机器人向前跃起。
第四阶段:当到达t3时刻后,进入第四阶段;[EN_A、EN_B、EN_C、EN_D]=[0110];[DIR_A、DIR_B、DIR_C、DIR_D]=[0000];[PUL_A、PUL_B、PUL_C、PUL_D]=[OFF/ON/ON/OFF]。步进驱动器A无输出;步进驱动器B驱动活塞电机Mtr2使其活塞向外推;步进驱动器C驱动活塞电机Mtr3使其活塞向外推;步进驱动器D无输出。在图22中,Mtr1、Mtr4各自的OP边都开始增加,Mtr2、Mtr3各自的OP边没有变。则机器人的左前脚和右后脚缩回,而其右前脚和左后脚保持不变,机器人依靠惯性呈抛物线下落。图24中的t3~t4时刻,机器人依靠惯性前进。
第五阶段:图24中,当达t4时刻后,进入第五阶段;[EN_A、EN_B、EN_C、EN_D]=[1001];[DIR_A、DIR_B、DIR_C、DIR_D]=[1001];[PUL_A、PUL_B、PUL_C、PUL_D]=[ON/OFF/OFF/ON]。步进驱动器A驱动Mtr1使其活塞向里拉;步进驱动器B无输出;步进驱动器C无输出;步进驱动器D驱动Mtr4使其活塞向里拉。在图22中,Mtr1、Mtr4的OP边同时变短,Mtr2、Mtr3的OP不变。则机器人的左前脚和右后脚对地发力,而其右前脚和左后脚保持不变,机器人继续向前上方跃起。图24中的t4~t5时刻,机器人向前跃起。
实际上第五阶段就是第一阶段的重复,此后重复上述第一阶段到第四阶段,机器人就可以跳跃着前进,每一次跳跃都有两个过程,对角线上的脚同时对地发力使机器人跃起,到最高位置后开始收回刚才发力的脚,落地后另一对角线上的脚发力再次使机器人跃起,到最高位置后开始收回另一对发力的脚。如此在对角线上的脚交替对地发力以及惯性驱动下,机器人就可以持续前进。
Mtr1~Mtr4的传感器输出信号输入到控制电路后,MCU系统可以对运动姿态、速度、位移进行实时的校正,以使四足行走机器人更平稳的前进。
- 一种应用于机器人直线关节的关节电机
- 无框组合式永磁同步直线电机直驱的机器人关节旋转装置