熔覆清洗装置及熔覆清洗方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及激光熔覆的技术领域,尤其涉及一种熔覆清洗装置及熔覆清洗方法。
背景技术
激光熔覆是激光束与基材、粉末的相互作用后形成冶金结合性良好的熔覆层,工件的表面上的锈迹、油污、氧化膜、灰尘等往往会影响熔覆的效果,使熔覆层产生缺陷,最终影响熔覆层的质量。一般在熔覆前,需要对工件的表面的污染物进行处理,传统的人工擦拭、打磨,劳动强度大且耗时,污染物容易对工作者身体造成影响,酸洗和喷砂方法会产生严重的环境污染,另外,现有的激光熔覆装置需要手动操作,不方便对高处或或狭小位置进行熔覆作业。
因此,亟需一种能够解决上述问题的熔覆清洗装置。
发明内容
鉴于以上问题,本发明提供一种能够自动化的熔覆清洗装置及熔覆清洗方法,熔覆效果更佳。
根据本发明的一方面,提供熔覆清洗装置,包括:
爬壁机器人,所述爬壁机器人能够在工件上移动;
清洗机构,所述清洗机构设置在所述爬壁机器人上,用于对工件进行清洗;
熔覆机构,所述熔覆机构设置在所述爬壁机器人上,用于对工件进行熔覆;以及
控制模块,所述控制模块分别与所述爬壁机器人、所述清洗机构以及所述熔覆机构电性连接,所述控制模块能够控制所述爬壁机器人按照预设路径移动,所述控制模块能够控制所述清洗机构对工件进行清洗,所述控制模块能够控制所述熔覆机构对工件进行熔覆。
所述爬壁机器人包括磁性爬壁部,所述磁性爬壁部能够吸附在工件上,并能够相对工件移动。
所述清洗机构包括第一激光发生器、第一光纤以及清洗头,所述第一激光发生器与所述清洗头通过所述第一光纤连接,所述第一激光发生器能够发出激光束,所述第一激光发生器发出的激光束经所述清洗头作用在工件上时,作用在工件上的激光束呈线状。
所述清洗头包括振镜、场镜以及驱动组件,所述驱动组件与所述振镜传动连接,并能够驱动所述振镜摆动,激光束经所述振镜反射至所述场镜上,所述场镜能够将所述振镜反射至所述场镜上的激光束聚焦在工件上,且激光束聚焦在工件上时,工件上的激光呈线状。
所述熔覆机构包括第二激光发生器、第二光纤、熔覆头和送粉组件,所述熔覆头与所述第二激光发生器通过所述第二光纤连接,所述第二激光发生器能够发出激光束,并经所述熔覆头作用在工件上,所述送粉组件用于为工件熔覆的位置输送粉末。
本实施例还包括路径传感器,所述路径传感器设置在所述爬壁机器人上,所述路径传感器能够识别所述爬壁机器人行进的路径和采集所行进的路径的信息,并将所述信息传输至控制模块。
本实施例还包括工业相机,所述工业相机设置在所述工业机器人上,所述工业相机能够采集清洗机构和熔覆机构作用工件的信息,并将所述信息传输至所述控制模块。
本实施例还包括机械手,所述机械手设置在所述爬壁机器人上,所述熔覆机构和所述清洗机构设置在所述机械手上,所述机械手能够使所述熔覆机构和所述清洗机构按照预设路径移动。
本实施例还包括第一冷却组件和第二冷却组件,所述第一冷却组件用于冷却所述清洗机构,所述第二冷却组件用于冷却所述熔覆机构。
根据本发明的另一方面,提供熔覆清洗方法,所述方法基于如上任一项实施例中所述的熔覆清洗装置,所述方法包括如下步骤:
通过所述清洗机构对工件进行清洗;
通过所述熔覆机构对清洗后的工件进行熔覆。
实施本发明实施例,将至少具有如下有益效果:
本实施例中,通过控制模块对爬壁机器人进行控制,能够使爬壁机器人按照预设的路径移动至人工无法轻易到达的位置,进而将设置在爬壁机器人上的清洗机构和熔覆机构带至工件的待作用位置处,以对工件清洗和熔覆。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
其中:
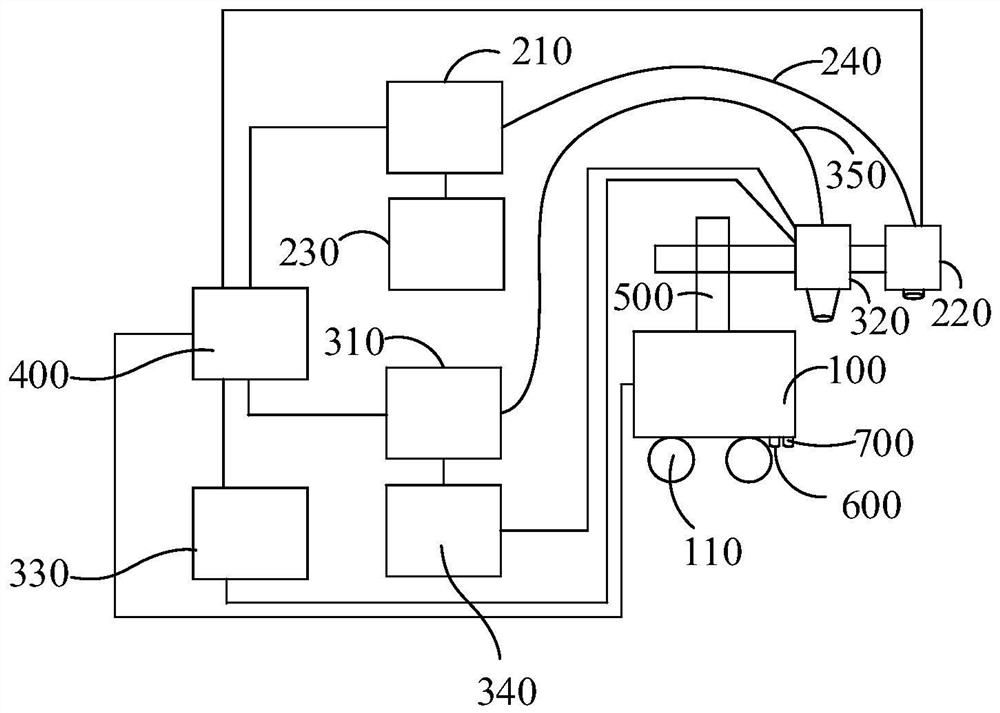
图1为一个实施例中的熔覆清洗装置的整体结构示意图;
图2为一个实施例中的熔覆清洗装置的清洗头的结构示意图;
图3为一个实施例中的熔覆清洗装置的熔覆头的结构示意图;
图4为一个实施例中的熔覆清洗装置的熔覆清洗方法流程图;
图中:10、工件;100、爬壁机器人;110、磁性爬壁部;210、第一激光发生器;220、清洗头;221、壳体;222、振镜;223、场镜;230、第一冷却组件;240、第一光纤;310、第二激光发生器;320、熔覆头;330、送粉组件;331、送粉管;332、粉末;340、第二冷却组件;350、第二光纤;400、控制模块;500、机械手;600、路径传感器;700、工业相机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果所述特定姿态发生改变时,则所述方向性指示也相应地随之改变。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
参照图1,本实施例中的熔覆清洗机构包括爬壁机器人100、清洗机构、熔覆机构以及控制模块400,控制模块400与爬壁机器人100、清洗机构以及熔覆机构分别电性连接,爬壁机器人100能够在待作业工件(图1未示出)上移动,控制模块400能够控制爬壁机器人100按照预设的路径移动,控制模块400能够控制清洗机构的开启和关闭,控制模块400也能够控制熔覆机构的开启与关闭,清洗机构活动设置在爬壁机器人100上,用于为待作业的工件10进行清洗作业,熔覆机构活动设置在爬壁机器人100上,用于为待熔覆的工件10进行熔覆作业。本实施例中的熔覆清洗装置既可以单独进行熔覆作业,又可以单独进行清洗作业,还可以是先对工件10进行清洗作业,再进行熔覆作业,功能多样化;当工件10的表面上存在锈迹、油污、氧化膜、灰尘等时,可以先通过对工件10的表面通过清洗机构进行清洗作业,再通过熔覆机构进行熔覆作业,此时熔覆效果更佳,对工件10的修复质量更好。另外,通过爬壁机器人100能够代替人工到达人工不容易到达的高处或狭小位置,进而将清洗机构和熔覆机构送至待作业位置进行清洗作业和熔覆作业,清洗作业和熔覆作业时更加的方便。
参照图1,本实施例中的爬壁机器人100包括磁性爬壁部110,当工件10为刚性材质时,爬壁机器人100通过磁性爬壁部110能够与工件10吸合,优选地,磁性爬壁部110为磁性滚轮,磁性滚轮吸附在工件10上,并可在工件10上移动,该方式结构简单,使用方便。
在另外的实施例中,磁性爬壁部110为多个电磁铁,爬壁机器人100具有多个行走连杆,多个行走连杆与工件10接触的位置均设置有电磁铁,优选地,各行走连杆上的电磁铁单独控制,具体地,当其中一个行走连杆需要向前移动时,该行走连杆上的电磁铁断电,并向前移动,移动后该行走连杆上的电磁铁再次通电与工件10吸合,同理,其它的行走连杆的工作原理如上。通过多个行走连杆的配合,本实施例中的爬壁机器人100能够在非平面的工件10上行走,能够适应更为复杂的工作环境。
当待作业的工件10是非刚性材质时,本实施例的爬壁机器人100包括真空吸盘,通过真空吸盘吸附在工件10上,具体地,本实施例的爬壁机器人100具有至少两个单独控制的真空吸盘,两个真空吸盘交替吸附工件10,进而按照预设路径前行。
当然,在另外的实施例中还可以是纳米吸附。比如在爬壁机器人100与工件10接触的位置设置有纳米纤维吸块。
需要说明的是,本实施例中的爬壁机器人100还可以是上述磁性爬壁部110、纳米吸附以及真空吸附技术的结合使用,以适应不同的材质的工件10。
参照图1以及图2,本实施例中的清洗机构包括第一激光发生器210、第一光纤240、清洗头220以及第一冷却组件230,第一激光发生器210与清洗头220通过第一光纤240连接,第一激光发生器210用于发射激光,优选地,第一激光发生器210为脉冲激光器,用于输出脉冲激光束,第一激光发生器210上发出的激光束经第一光纤240传输至清洗头220上,然后自清洗头220聚焦在工件10上,当激光束聚焦在工件10上时,作用在工件10上的激光束呈线状,即激光束呈线性聚焦在工件10上,相较于激光束以点状聚焦在工件10上,本实施例中的清洗机构清洗速度更快。第一冷却组件230通过管道与清洗机构相连,优选为水冷的方式,通过第一冷却组件230能够为第一激光发生器210降温冷却,保证第一激光发生器210的温度在正常的工作范围内,必要时,也可对清洗头220进行冷却。
优选地,清洗头220包括壳体221、驱动组件、振镜222以及场镜223,振镜222设置在壳体221内,驱动组件与振镜222传动连接,驱动组件能够驱动振镜222往复摆动,具体地,驱动组件为驱动电机,驱动电机通过往复的正转和反转带动振镜222往复的正转和反转,以达到往复摆动的目的,驱动组件与控制模块400电性连接,控制模块400能够控制驱动组件的开启、关闭以及驱动组件的摆动速率。第一激光发生器210发出的激光束经振镜222反射至场镜223,反射至场镜223上的激光束又经场镜223聚焦至工件10上,由于振镜222处于摆动状态,振镜222反射至场镜223上的激光束为线状,进而经场镜223聚焦后,聚焦在工件10上的激光束呈线状。本实施例中的清洗头220的结构简单,且能够将聚焦在工件10上的激光束由点状转换为线状,使清洗效率大大提高。
优选地,本实施例中的第一冷却组件230还包括喷水头,通过喷水头可以对待作业工件10进行喷水清洗作业,以初步清洗待作业的工件10。
参照图1以及图3,本实施例中的熔覆机构包括第二激光发生器310、第二光纤350、熔覆头320、送粉组件330以及第二冷却组件340,第二激光发生器310与熔覆头320通过第二光纤350连接,第二激光发生器310用于发射激光束,优选地,第二激光发生器310为半导体连续激光器,用于输出连续激光束,具体地,第二激光发生器310输出的激光束经熔覆头320在工件10上聚焦为一点,进而使该点的温度升高以使工件10熔化成熔池,送粉组件330用于为工件10输送粉末332,具体地,当工件10的表面在激光束的作用洗下形成熔池后,送粉组件330将粉末332输送至熔池内,粉末332冷却后形成熔覆层,进而完成对工件10的修复。第二冷却组件340与第二激光发生器310通过管道连接,用于为第二激光发生器310以及熔覆头320进行降温处理以保持在正常的温度范围内。
优选地,熔覆头320的激光束的出口端设置有送粉管331,送粉管331与送粉组件330连接,粉末332在送粉管331内的流向与激光束的方向基本一致,进而便于送粉管331内的粉末332精准的到达熔池内。
参照图1,本实施例中的熔覆清洗装置还包括机械手500,机械手500与控制模块400电性连接,控制模块400能够控制机械手500按照预设路径移动,机械手500设置在爬壁机器人100上,清洗机构与熔覆机构设置在机械手500上,通过机械手500将熔覆机构和清洗机构移动至待加工位置,优选地,清洗头220和熔覆头320设置在机械手500上,而将第一激光发生器210与第二激光发生器310设置在地面上,进而减小爬壁机器人100的负重,减小了生产难度,另外在保证激光束质量的前提下,第一光纤240与第二光纤350应尽量长。
优选地,本实施例中的机械手500包括第一夹持部和第二夹持部,第一夹持部用于夹持清洗头220,第二夹持部用于夹持熔覆头320,第一夹持部与第二夹持部可单独活动,进而可以适应不同的工作模式,比如单独使用清洗头220或单独使用熔覆头320。
优选地,本实施例中的机械手500还包括预留夹持部,预留夹持部可用于夹持机械加工件,以对熔覆作业完成的工件10进行机械加工以达到更高的精度要求。当然,预留夹持部还可以夹持其它加工件。
需要说明的是,本实施例中的机械手500为本领域技术人员惯用的机械手500,在此不做赘述。
参照图1,本实施例中还包括路径传感器600,路径传感器600设置在爬壁机器人100上,路径传感器600能够识别爬壁机器人100行进的路径,并能够采集爬壁机器人100行进的路径的信息,并将该信息传输至控制模块400。通过路径传感器600能够实时监测爬壁机器人100的行走路径,并能够及时矫正,以保证爬壁机器人100行走路径的高精度。
参照图1,本实施例中还包括工业相机700,工业相机700设置在工业机器人上,工业相机700能够采集清洗机构和熔覆机构作用工件10的信息,并将信息传输至控制模块400。通过工业相机700能够对清洗头220和熔覆头320的作业信息进行实时监测,并能够及时调整清洗头和熔覆头以保证作业的高精度。
本实施例中的熔覆清洗装置通过将激光技术与机器人技术和传感器技术相结合,大大的提高了本实施例中的熔覆清洗装置的智能化水平,进而可以实现大型构件和大型罐体、墙体构件的智能化的激光清洗和熔覆。
参照图4,通过本实施例的熔覆清洗装置,提供一种熔覆清洗方法,该方法包括如下步骤:
通过清洗机构对工件10进行清洗作业;
通过熔覆机构对清洗后的工件10进行熔覆作业。
通过将工件10进行清洗作业后,再进行熔覆作业,工件10的熔覆效果更佳,修复效果更好。
具体地,通过爬壁机器人100将清洗头220和熔覆头320送至工件10上待作业的位置处,之后先开启清洗机构,然后通过清洗机构对工件10进行清洗作业,清洗完毕后,关闭清洗机构,并打开熔覆机构,然后通过熔覆机构对工件10进行熔覆作业,当熔覆作业完成后,关闭熔覆机构。
需要说明的是,当工件10无需清洗时,可直接开启熔覆机构进行熔覆作业。
本实施例提供两种对工件10修复的实施例。
实施例一:工件10的清洗宽度与熔覆层宽度不一致或工件10需要熔覆多层的情况。
首先控制模块400控制第一激光发生器210出光,激光束通过第一光纤240传输到清洗头220,后通过振镜222的摆动将激光束以线状形式输出,激光束经场镜223聚焦到工件10的表面进行清洗,同时控制爬壁机器人100匀速移动,并根据工业相机700和路径传感器600反馈的信息随时调整清洗参数和爬壁机器人100的行进路径,工件10表面污物清洗干净后控制第一激光发生器210关光;其次,通过控制模块400控制第二激光发生器310出光和送粉组件330输送粉末332,激光束和粉末332经熔覆头320后与清洗后的工件10表面相互作用形成熔覆层,同时控制爬壁机器人100匀速移动,并根据工业相机700和路径传感器600反馈的信息随时调整熔覆参数和爬壁机器人100的行进路径,若需要熔覆多层,重复以上熔覆过程;最后,熔覆完成,控制第二激光发生器310关光、送粉组件330停止输送粉末332,爬壁机器人100停止移动,工件10修复完成。
实施例二:清洗宽度与熔覆宽度一致和只熔覆一层的情况。
此种情况下,清洗机构和熔覆机构可以同时开启。首先,控制模块400控制第一激光发生器210出光,激光束通过第二光纤350传输到清洗头220,后经过振镜222的摆动将激光束以线状形式光束输出,激光束经场镜223聚焦辐照到工件10表面进行清洗;同时,控制模块400控制第二激光发生器310出光,激光束经光纤传输到熔覆头320,送粉组件330输送粉末332到熔覆头320,激光束和粉末332经过熔覆头320后在清洗后的工件10表面进行熔覆形成熔覆层;其次,控制模块400控制爬壁机器人100向前匀速移动,实现一边移动一边清洗和熔覆,并根据工业相机700和路径传感器600反馈的信息对清洗和熔覆参数和行走路径及时调整,从而使清洗和熔覆顺利进行;最后,工件10表面清洗干净和熔覆完成后,控制模块400控制清洗和熔覆激光器关光,爬壁机器人100停止移动,整个清洗和熔覆过程结束。通过将清洗机构、熔覆机构与爬壁机器人100相结合,能够实现大型结构件、大型罐体和墙体构件的清洗、熔覆。
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 熔覆清洗装置及熔覆清洗方法
- 熔覆轨迹可调的激光熔覆装置及调节熔覆轨迹宽度的方法