基于三次B样条插值的血管内超声图像分割与测量方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及医学图像处理技术领域,尤其涉及一种基于三次B样条插值的血管内超声图像分割与测量方法。
背景技术
近年来,全球冠心病的发病率和死亡率呈上升趋势,冠状动脉疾病中常见的动脉粥样硬化(atherosclerosis,AS)已成为危害人类健康的首要疾病之一。通过对IVUS(心血管内超声)图像内外膜分割,不仅可对血管腔的面积进行精确的测量,而且可以发现早期的冠状动脉粥样硬化斑块,进而对斑块的偏心距、壁厚及成分含量进行检测。
目前主流的分割方法是手动或者半自动勾画IVUS图像的内外膜,但在严重的动脉粥样硬化病变时,典型的3层血管壁结构消失,中层变薄,且胶原纤维聚集,内膜增厚,这导致人工勾画IVUS图像非常费时,并且不同用户间存在差异。而当血管壁钙化时,会产生超声高反射性声影,遮盖住其后方的组织,这又使大多数半自动分割方法分割不精确。
发明内容
本发明提供一种基于三次B样条插值的血管内超声图像分割与测量方法,可以在内外膜上取少量的点,用三次B样条插值自动生成目标轮廓及最短、最长内径,比现有的纯手工勾画技术要节省很多时间。
为此,本发明所采用的具体技术方案如下:
一种基于三次B样条插值的血管内超声图像分割与测量方法,其特征在于,包括以下步骤:
1)获取待处理的心血管内超声图像,并在图上校准像素的实际单位;
2)通过手动在图上取少量的点,利用三次B样条插值函数生成分割轮廓;
3)得到分割轮廓后,通过分割轮廓上的点计算得到过质心的最短内径和最长内径;
4)通过两次分割得到的内外膜轮廓,计算得到封闭轮廓包含的面积和血管狭窄率。
进一步地:在步骤1)中,校准在图像上选取两个点,由点坐标计算得到两点之间的像素个数,取定两点之间的实际长度,得到实际像素单位。
进一步地:所述的三次B样条插值函数采用下列公式:
B(t)=P
其中,P
进一步地:在步骤2)中,每两个手动选取的点之间,插入多个点。
进一步地:将所有手动取点和差值点放入集合s[i],其中i表示点的序号,i=1,2,3….N。
进一步地:手动取点需按顺时针或者逆时针的顺序。
进一步地:在步骤2)中,若需要进一步精确分割轮廓,可计算生成样条的位置控制点和弧度控制点,手动微调得到精确位置。
进一步地:得到样条轮廓的位置控制点和弧度控制点的方法为:位置控制点即为手动取点,弧度控制点需将手动所取相邻点之间用直线段连接,得到线段集合a[i],计算每条线段的中点,将相邻中点之间用直线段连接,得到线段集合b[i],将每个线段依次平移到其中点与手动取点重合,则该线段的两端点即为弧度控制点。
进一步地:在步骤3)和步骤4)中所述的计算得到轮廓面积和过质心的最短内径和最长内径的具体步骤分别为:
9.1、利用向量积求轮廓所包含图形的面积:
其中s[i].x和s[i].y分别为点i的横坐标和纵坐标;
9.2、利用上一步求得的面积计算轮廓质心:
9.3、采用如下方法计算得到过质心的最短和最长内径的两点:
9.3.1、外循环从i=1,2,3…N,循环计算s[i]与质心centroid两点构成的直线的参数,以及s[i]到质心centroid的距离,记为basic[i];
9.3.2、在外循环中的第i次中,内循环从j=1,2,3…N,循环计算s[j]到(第i次得到的)直线距离linedistance[i,j],s[j]到s[i]的距离pointdistance[j,i],以及s[j]到质心centroid的距离cendistance[j];在每次内循环第j次后,如果linedistance[i,j]小于basic[i]并且pointdistance[j,i]大于cendistance[j],则i,j为过轮廓质心的直线上的两个端点;
9.3.3、在外循环遍历i结束后,计算所有端点对的距离L[i],最短的端点对即为最短内径,最长的端点对即为最长内径。
进一步地:在计算得到内膜面积A1和外膜面积A2后,采用如下公式计算血管狭窄率:
Rate=(A2-A1)/A2*100;意义在于Rate为百分制单位,数值越接近100%,狭窄程度越大。
本发明与现有技术相比,具有的有益效果是:
(1)通过利用3次B样条插值技术,自动的生成血管内外膜的大致轮廓,结合手工微调,能够得到精确轮廓,且同时自动生成轮廓内的最短和最长内径,比现有的纯手工勾画技术要节省很多时间。
(2)利用分割好的轮廓点,可以自动地提供内外膜的面积、内径长度以及血管狭窄率。
附图说明
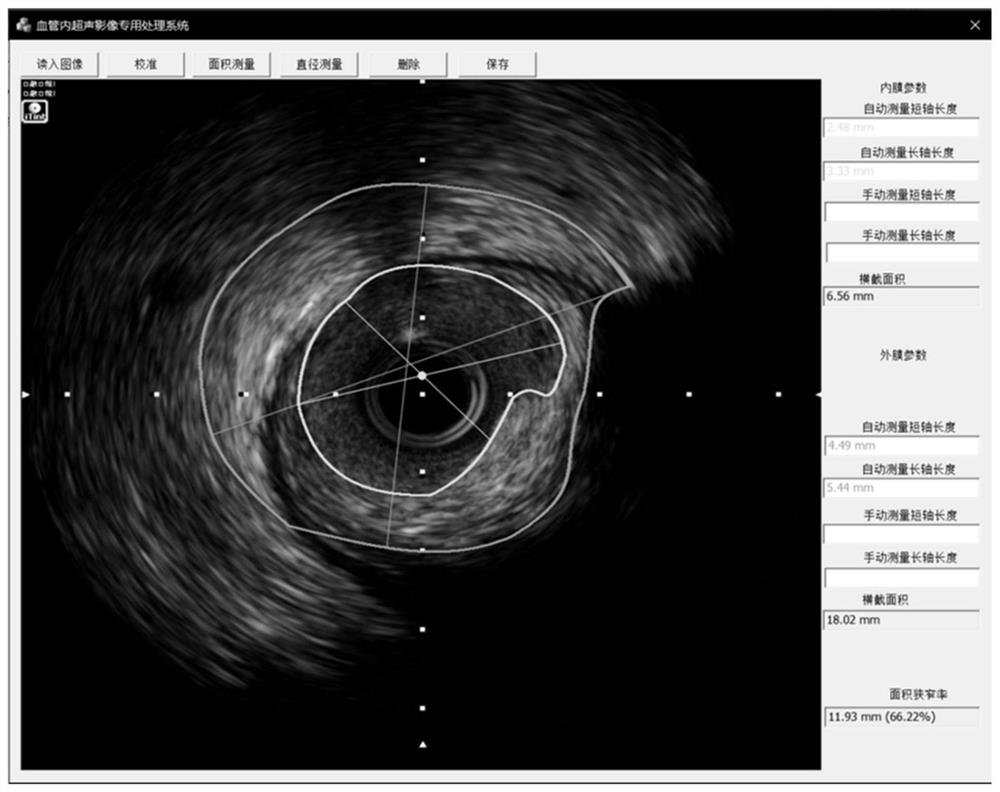
图1本发明实施例中内外膜手动取点后的自动分割及测量图;
图2本发明实施例中3次B样条的位置控制点和弧度控制点示例图;
图3本发明实施例中方法流程图。
具体实施方式
下面结合实施例和附图来详细说明本发明,并将本发明的实验中相关数据公开阐述,进而将本发明的方法详细透彻的传达给本来领域的技术人员。
本发明的具体实现步骤如下:
1)获取待处理的心血管内超声图像,并在图上校准像素的实际单位。
如图1所示,在图像上选取两个点,由点坐标计算得到两点之间的像素个数,取定两点之间的实际长度,得到实际像素单位。
2)通过手动在图上取少量的点,手动取点需按顺时针或者逆时针的顺序,利用三次B样条插值函数生成分割轮廓,如图2所示,每两个手动选取的点之间,插入100个点,将所有手动取点和差值点放入集合s[i],其中i表示点的序号,i=1,2,3….N。若需要进一步精确分割轮廓,可计算生成B样条的位置控制点和弧度控制点,手动微调得到精确位置。
2.1)其中三次B样条插值函数采用下列公式:
B(t)=P
这里P
2.2)其中得到样条轮廓的位置控制点和弧度控制点的方法为:位置控制点即为手动取点,弧度控制点需将手动所取相邻点之间用直线段连接,得到线段集合a[i],计算每条线段的中点,将相邻中点之间用直线段连接,得到线段集合b[i],将每个线段依次平移到其中点与手动取点重合,则该线段的两端点即为弧度控制点。
3)得到分割轮廓后,可计算得到封闭轮廓包含的面积、过质心的最短内径和最长内径;
4)通过两次分割得到的内外膜轮廓计算得到的内外膜面积,可计算血管狭窄率。
其中得到轮廓面积和过质心的最短内径和最长内径的具体步骤分别为:
1.利用向量积求轮廓所包含图形的面积:
其中s[i].x和s[i].y分别为点i的横坐标和纵坐标。
2.利用上一步求得的面积计算轮廓质心:
3.利用上一步求得的质心和轮廓上的点集s[i],由于轮廓是不规则图形,因此采用如下方法计算得到过质心的最短和最长内径的两点:
3.1)外循环从i=1,2,3…N,循环计算s[i]与质心centroid两点构成的直线的参数,以及s[i]到质心centroid的距离,记为basic[i];
3.2)在外循环中的第i次中,内循环从j=1,2,3…N,循环计算s[j]到(第i次得到的)直线距离linedistance[i,j],s[j]到s[i]的距离pointdistance[j,i],以及s[j]到质心centroid的距离cendistance[j]。在每次内循环第j次后,如果linedistance[i,j]小于basic[i]并且pointdistance[j,i]大于cendistance[j],则i,j为过轮廓质心的直线上的两个端点;
3.3)在外循环遍历i结束后,计算所有端点对的距离L[i],最短的端点对即为最短内径,最长的端点对即为最长内径;
3.4)用如下公式计算血管狭窄率:
利用步骤1的面积公式求得内膜轮廓所包含的面积A1和外膜轮廓所包含的面积A2,再计算血管狭窄率:Rate=(A2-A1)/A2*100;意义在于Rate为百分制单位,数值越接近100%,狭窄程度越大。
以上所述,仅为本发明的较佳实施举例,并不用于限制本发明,凡在本发明精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于三次B样条插值的血管内超声图像分割与测量方法
- 基于三次B样条插值的血管内超声图像分割与测量方法