用于自动驾驶车辆辅助设备的安装组件
文献发布时间:2023-06-19 12:16:29
技术领域
本申请涉及设备安装技术领域,尤其是涉及一种用于自动驾驶车辆辅助设备的安装组件。
背景技术
自动驾驶车辆通过安装在其上的辅助设备去自动识别道路信息和行人信息等,例如通过激光雷达进行控制以完成避障等功能。在探测精度、探测距离、稳定性和对周围环境适应性等关键性能上,激光雷达都有着明显的优势。
当前,安装于自动驾驶车辆上的3D激光雷达的垂直视场角范围有限,通常在±30°至±50°的范围内。通常,3D激光雷达是安装在车顶的最高处,但是车前仍会有一部分盲区。为了弥补这一盲区,无人驾驶车辆的相关制造企业或研究机构会设计在车头处安装一个距离地面高度在30cm至50cm范围内的前向激光雷达。
目前,在装配车辆的前向激光雷达时,相关制造企业或研究机构是选择切割车头的进气格栅,通过粘接、螺栓连接等方式,将激光雷达固定在前保险杠盖上。但这种安装方式并不牢靠。在车辆行驶时,激光雷达与车身间会有较大的相对位移、偏转,随着使用时间的变长,系统整体的刚度也会下降;同时,这种安装方式灵活性较差,无法根据需要调节激光雷达的安装高度以及水平和垂直视场角度,导致安装时标定困难。
发明内容
有鉴于此,为了解决上述技术问题,本申请提供了一种自动驾驶车辆辅助设备的安装组件。上述安装组件包括:
一种用于自动驾驶车辆的辅助设备的安装组件,包括:
连接部件,固定在所述自动驾驶车辆上;
第一调节部件,附接在所述连接部件上并且在所述第一方向上可调节;
第二调节部件,附接在所述第一调节部件上并且在所述第二方向上可调节;以及
第三调节部件,附接在所述第二调节部件上并且在所述第三方向上可调节,所述第三调节部件设置有用于安装所述辅助设备的安装部。
在一个实施例中,所述第一方向平行于所述自动驾驶车辆的高度方向;所述第二方向平行于所述自动驾驶车辆的宽度方向;以及所述第三方向平行于所述自动驾驶车辆的长度方向。
在一个实施例中,所述连接部件包括彼此间隔地固定在所述自动驾驶车辆上的多个连接座,所述第一调节部包括多个支撑座,所述支撑座与所述连接座一一对应。
在一个实施例中,所述多个连接座彼此间隔地固定在所述自动驾驶车辆的前防撞梁上。
在一个实施例中,所述支撑座具有第一侧板和第二侧板,所述第一侧板和第二侧板邻接且呈一定角度,第一侧板可调节地附接在一个连接座上。
在一个实施例中,所述连接部件通过螺接、粘接或焊接固定在所述自动驾驶车辆上。
在一个实施例中,所述连接座上设有一列或多列螺孔,每一列螺孔中包括多个螺孔;所述支撑座的第一侧板上设有一列或多列槽孔,所述支撑座的第一侧板上的每一列槽孔对应所述连接座上的一列螺孔。
在一个实施例中,所述支撑座的第一侧板上的所述槽孔为长型槽孔,其长度是预先确定的,且其长度方向为所述第一方向。
在一个实施例中,所述第一调节部件与所述连接部件之间的固定连接为半永久固定连接,所述第二调节部件通过螺钉固定在所述第一调节部件上,所述第三调节部件通过螺钉固定在所述第二调节部件上。
在一个实施例中,所述多个连接座包括第一连接座和第二连接座,所述多个支撑座包括第一支撑座和第二支撑座。
在一个实施例中,所述第二调节部件具有第一端部和第二端部,所述第一端部设有第一列槽孔,所述第二端部设有第二列槽孔,所述第一列槽孔与所述第二列槽孔具有相同的排布。
在一个实施例中,所述第一支撑座的第二侧板上设有多个螺孔,所述多个螺孔与所述第二调节部件的第一端部上的所述第一列槽孔一一对应;所述第二支撑座的第二侧板上设有多个螺孔,所述多个螺孔与所述第二调节部件的第二端部上的所述第二列槽孔一一对应。
在一个实施例中,所述第一列槽孔与所述第二列槽孔中每个槽孔为长型槽孔,且其长度方向为所述第二方向。
在一个实施例中,所述第一列槽孔和所述第二列槽孔中的槽孔为U型或L型槽孔。
在一个实施例中,所述第二调节部件在所述第一端部设有一列或多列螺孔,在所述第二端部设有一列或多列螺孔,所述第一端部的一列或多列螺孔与所述第二端部的一列或多列螺孔具有相同的排布。
在一个实施例中,所述第三调节部件具有第三端部和第四端部,所述第三端部对应于所述第二调节部件的第一端部,所述第四端部对应于所述第二调节部件的所述第二端部;所述第三端部和所述第四端部上均设有多个槽孔,且所述第三端部上的所述多个槽孔与所述第四端部上的所述多个槽孔具有相同的排布。
在一个实施例中,所述第三端部和第四端部上的槽孔为长形槽孔,其长度方向为所述第三方向,所述第三端部上的每一个槽孔对应于所述第二调节部件的第一端部上的一列螺孔,所述第四端部上的每一个槽孔对应于所述第二调节部件的第二端部上的一列螺孔。
在一个实施例中,所述第三端部和所述第四端部上的所述多个槽孔为U型或L型槽孔。
在一个实施例中,安装部设有多组螺孔,以用于适配不同安装孔位的辅助设备。
在一个实施例中,所述安装部的表面与地面平行。
在一个实施例中,所述辅助设备为前向激光雷达。
在一个实施例中,所述安装部的表面与地面垂直。
在一个实施例中,所述辅助设备为毫米波雷达或超声波雷达。
附图说明
图1为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的结构示意图。
图2为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的安装示意图。
图3为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的结构示意图。
图4为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的结构示意图。
图5为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的安装示意图。
图6为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的结构示意图。
图7为本申请一实施例中用于自动驾驶车辆辅助设备的安装组件的结构示意图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。
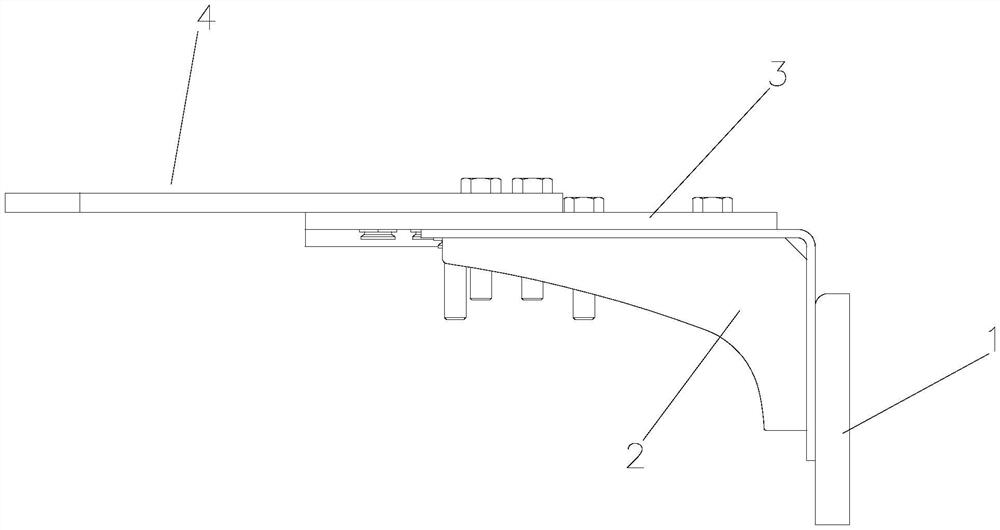
本申请在一实施例中提供了一种用于自动驾驶车辆辅助设备的安装组件,如图1和图2所示。所述安装组件包括:连接部件1,所述连接部件1固定在所述自动驾驶车辆上;第一调节部件2,所述第一调节部件2附接在所述连接部件上并且在所述第一方向上可调节;第二调节部件3,所述第二调节部件3附接在所述第一调节部件上并且在所述第二方向上可调节;以及第三调节部件4,所述第三调节部件4附接在所述第二调节部件上并且在所述第三方向上可调节,所述第三调节部件设置有用于安装所述辅助设备的安装部。
本实施例中的三个方向可以是三个互相垂直的方向,例如空间坐标系中x轴、y轴和z轴的方向。
以前向激光雷达为辅助设备为例。传统的固定方式中,前向激光雷达是通过胶黏或螺栓的连接方式直接固定在车辆上的。因此,传统的雷达固定方式无法灵活调节雷达的安装高度、水平和竖直视场角度,其安装标定困难。
通过本实施例中提供的用于自动驾驶车辆辅助设备的安装组件,前向激光雷达通过安装组件固定在车辆上,该安装组件在三个方向维度上可以进行自由调节,由此实现了激光雷达在安装高度、水平以及垂直视场角度上的灵活调节,满足了不同车型的自动驾驶车辆对前向激光雷达的安装标定的需求。
本申请在一实施例中提供了一种用于自动驾驶车辆辅助设备的安装组件,结合图3和图4所示。
所述连接部件1包括第一连接座11和第二连接座12。所述第一调节部件2包括第一支撑座21和第二支撑座22。第一连接座11和第二连接座12分别固定在车辆的前防撞梁5上。第一支撑座21和第二支撑座22分别具有第一侧板和第二侧板,第一侧板和第二侧板相邻且呈角度,例如呈直角。第一支撑座21的第一侧板可调节地固定在第一连接座11上,第二支撑座22的第一侧板可调节地固定在第二连接座12上。所述第一支撑座21和第二支撑座22可同步调节,且其调节方向与地面垂直。第二调节部件3可调节地固定在第一支撑座21和第二支撑座22的第二侧板上。所述第二调节部件3的调节方向在水平面上与车辆的行驶方向垂直。第三调节部件4可调节地固定在所述第二调节部件3上,所述第三调节部件4的调节方向在水平面上与车辆的行驶方向平行。所述车前激光雷达安装在所述第三调节部件4的安装部上。
在传统的固定方式中,雷达是通过胶黏或螺栓的连接方式固定在车辆的前保险杆盖上。由于胶粘的方式会随着使用时间变长,黏性降低,车身抖动、灰尘等也会进一步加速雷达的松动。而对于前保险杠盖上开孔、使用螺栓连接的方式,由于前保险杠盖本身材料刚度较低,车辆抖动时,雷达与车身间会有较大位移和偏转。
通过本实施例提供的用于自动驾驶车辆辅助设备的安装组件,以前向激光雷达为例,可将激光雷达以可调节的方式固定在车辆前防撞梁上。由于该安装组件是通过螺栓或高强度胶直接固定在车辆前防撞梁上,因此,可将激光雷达进行牢固地安装。并且,按照这种方式,安装组件与车辆防撞梁的固定连接方式并不影响整个安装组件的调节自由度。又由于该安装组件可以在三个方向维度上进行自由调节,这使得车辆前向激光雷达可以根据不同车型的需要调节其安装高度、水平以及垂直视场角度。也就是说,本实施例提供的安装组件,在保证前向激光雷达牢固安装的同时,实现了该前向激光雷达可灵活调节的目的。
在本申请的一个实施例中,如图5所示,以前向激光雷达为例。车辆的前防撞梁5上可设有攻螺孔,第一和第二连接座分别通过螺栓穿过攻螺孔固定在车辆的前防撞梁5上。可选地,第一和第二连接座也可以通过高强度胶直接粘接在车辆的前防撞梁5上。可选地,第一和第二连接座也可以通过焊接方式直接固定在车辆的前防撞梁5上。前向激光雷达6可通过螺栓固定在第三调节部件4的安装部上。
结合图4和图5所示,以第一连接座11和第一支撑座21为例(第二连接座12和第二支撑座22的连接方式相同,不再累述),所述第一连接座11上设有一列或多列螺孔,每一列螺孔中包括多个螺孔。所述第一支撑座21的第一侧板上设有多个槽孔,其中每个槽孔对应第一连接座11上的一列螺孔,使得当第一支撑座21沿着垂直于地面的方向上下移动时,每一个槽孔中至少有一个螺孔。例如,当根据实际情况需要降低激光雷达距离地面的高度时,可以将第一支撑座21的第一侧板沿着垂直于地面的方向向下滑动到合适的位置,此时是可以用肉眼观察到槽孔沿着对应的一列螺孔向下滑动到某一合适的位置处,可以看到有完整的螺孔出现在槽孔中,用螺钉穿过槽孔和该对应的完整螺孔,以将第一支撑座21的第一侧板固定在第一连接座11上。例如,当根据实际情况需要升高激光雷达距离地面的高度时,可以将第一支撑座21的第一侧板沿着垂直于地面的方向,向上滑动到合适的位置,此时是可以用肉眼观察到槽孔沿着对应的一列螺孔向上滑动到某一合适的位置处,可以看到有完整的螺孔出现在槽孔中,用螺钉穿过槽孔和该对应的完整螺孔,以将第一支撑座21的第一侧板固定在第一连接座11上。本实施例中,第一支撑座21和第二支撑座22的第一侧板上的槽孔为长型槽孔,其长度方向垂直于地面。
在将第一支撑座21的第一侧板固定在第一连接座11上,还可在螺钉与螺孔的连接处滴上螺纹胶使得其连接作为半永久固定连接。
在本实施例提供的用于自动驾驶车辆辅助设备的安装组件中,第一调节部件可沿垂直于地面的方向相对于连接部件进行上下移动,使得该安装组件上的激光雷达相对于地面的高度可调节。此外,第一调节部件与连接部件之间的半永久固定连接使得安装组件的整体刚度不会随着使用时间的增长而显著下降。
在本申请的一个实施例中,如图6所示,所述第二调节部件3具有第一端部和第二端部。第一端部设有第一列槽孔。该第一列槽孔包括多个槽孔。在第一支撑座21的第二侧板上设有多个螺孔。所述第一支撑座21的第二侧板上的螺孔的数量与第二调节部件3的第一端部上的槽孔的数量相等,且每个所述螺孔与每个所述槽孔一一对应。所述第二调节部件3的第一端部设通过螺钉穿过其上的槽孔与第一支撑座21的第二侧板上的对应螺孔固定于所述第一支撑座21的第二侧板上。所述第二调节部件3在第二端部设有第二列槽孔。该第二列槽孔包括多个槽孔。第二支撑座22的第二侧板上设有多个螺孔,所述第二支撑座22的第二侧板上的螺孔的数量与第二调节部件3的第二端部上的槽孔的数量相等,且每个所述螺孔与每个所述槽孔一一对应。所述第二调节部件3的第二端部设通过螺钉穿过其上的槽孔与第二支撑座22的第二侧板上的对应螺孔固定于所述第二支撑座22的第二侧板上。本实施例中,第一支撑座21的第二侧板上的多个螺孔与第二支撑座21的第二侧板上的多个螺孔具有相同或相似的排布。相应地,所述第二调节部件3的第一端部上的多个槽孔和其第二端部上的多个槽孔也具有相同或相似的排布。
本实施例中,第二调节部件3的第一端部和第二端部上的槽孔为长型槽孔,其长度方向在水平面上与所述车辆的行驶方向垂直。第一列长型槽孔与第二列长型槽孔的排布相同。槽孔的长度可根据需要设计。
第二调节部件3的作用是保证激光雷达能够居中地安装在车辆前防撞梁上。这是由于,首先,前防撞梁具有弧度,不同车型的弧度不一样,而这第一支撑座21和第二支撑座22是平的,需要在前防撞梁的长度方向上找到适合的位置来打孔安装;其次,手工打孔会有偏差,设计槽孔后,即使支撑座在前防撞梁的长度方向上有偏差,第二调节部件3也可以再次通过槽孔及车身上的其它特征对中;最后,有些车型前防撞梁上还有其它附件,需要找到合适的支撑座间距来安装组件,而第二调节部件3上设计的槽孔,就可以满足不同间距的安装需求,不用重新设计第二调节部件3。
在另一实施例中,所述第一列槽孔与第二列槽孔中的槽孔均可设计为U型槽孔或L型槽孔,使得第二调节部件3可以绕垂直于地面的轴线偏转,实现进一步适配不同弧度的车辆前防撞梁,由此避免了更改其他零部件的设计。
在本申请的一个实施例中,如图7所示,所述第二调节部件3在第一端部处还设置有多列螺孔,在第二端部处也地设置有多列螺孔。所述第三调节部件4具有与所述第一端部对应的第三端部和与所述第二端部对应的第四端部。在第三端部处设有多个槽孔,在第四端部处也地设置有多个槽孔。第三调节部件4的第三端部的每个槽孔对应于第二调节部件3的第一端部上的一列螺孔,第三调节部件4的第四端部上的每个槽孔对应于第二调节部件3的第二端部上的一列螺孔。本实施例中,所述第一端部上的多列螺孔与所述第二端部上的多列螺孔具有相同或相似的排布。所述第三端部上的槽孔和第四端部上的槽孔具有相同或相似的排布。所述第三端部上和第四端部上的槽孔均为长型槽孔,其长度方向在水平面上与车辆的行驶方向平行。
在本实施例提供的用于自动驾驶车辆辅助设备的安装组件中,所述第三调节部件4可以根据需要沿着车辆的行驶方向进行调节。例如,当需要激光雷达向车头前方调节时,将第三调节部件4沿着平行于车辆的行驶方向移动,在移动过程中保持第三调节部件4上的每一个槽孔与第二调节部件3上的一列螺孔对应,当移动到合适的位置时,通过螺钉穿过第三调节部件4上的槽孔与对应的一列螺孔中完整地出现在该槽孔中的一个螺孔,将第三调节部件4固定在第二调节部件3上。例如,当需要将激光雷达向车头相反方向移动时,将第三调节部件4沿着车头相反方向移动,在移动过程中保持第三调节部件4上的每一个槽孔与第二调节部件3上的一列螺孔对应,当移动到合适的位置时,通过螺钉穿过第三调节部件4上的槽孔与对应的一列螺孔中完整地出现在该槽孔中的一个螺孔,将第三调节部件4固定在第二调节部件3上。
由于不同激光雷达的尺寸不一样,比如换一个大尺寸的激光雷达,为了不影响车辆头部的整体外观,就需要将激光雷达的位置向靠近车辆侧移动;另一方面,不同车型的前防撞梁距离车头最外侧的距离是不一样的,为了使所选用的激光雷达能够合适地安装在车辆的前防撞梁上,也需要能够调节激光雷达与车辆前防撞梁之间的距离。
在本实施例提供的用于自动驾驶车辆前向激光雷达的安装组件中,第三调节部件4与车辆防撞梁之间的距离可调整,使得第三调节部件4的安装部上安装的激光雷达与车辆防撞梁之间的距离是可调整的。由此,实现了在不同尺寸的激光雷达,以及不同车型防撞梁距离车头最外侧的距离不同的情况下,可灵活安装前向激光雷达的目标。
在另一实施例中,第三调节部件4的第三端部和第四端部上的槽孔均可以为U型槽孔或L型槽孔,使得第三调节部件4可以绕垂直于地面的轴线偏转,实现在雷达纵轴线与车身纵轴线之间存在一定偏转角的情况下,能够将雷达的纵轴线再次偏转一定角度,使其纵轴与车身纵轴平行,由此避免了更改其他零部件的设计。
在本申请的另一实施例提供的用于自动驾驶车辆辅助设备的安装组件中,第一调节部件2的肋板可以设计为不同的形状,例如L形、三角形、弧形等,从而避免出现安装组件与某些特定车型的进气格栅相干扰的情况。
在本申请的另一实施例提供的用于自动驾驶车辆辅助设备的安装组件中,如图6所示,第三调节部件4上设有多组螺孔,用于适配具有不同安装孔位的激光雷达。由此可以实现,在更换激光雷达时无需拆卸其他零部件。
在本申请的另一实施例中,在车头整体刚度足够高时,如货车车头,用于自动驾驶车辆辅助设备的安装组件还可以直接固定在进气格栅上。这样避免了对车前保险杠的拆卸,方便安装。
在本申请的另一实施例提供的用于自动驾驶车辆辅助设备的安装组件中,第三调节部件4上用于安装辅助设备的安装部的表面可以设计为与地面垂直,以便于其安装平面与地面垂直的雷达进行安装,例如毫米波雷达、超声波雷达等。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 用于自动驾驶车辆辅助设备的安装组件
- 用于对自动驾驶车辆的多个辅助设备进行时间同步的方法、车辆、计算机设备和存储介质