汽车电子制动助力装置
文献发布时间:2023-06-19 13:48:08
所属技术领域
本发明涉及一种汽车电子制动助力装置,属于汽车部件领域。
背景技术
目前,汽车普遍采用的真空刹车助力装置,依靠发动机产生的真空负压,减轻制动作用力,虽然技术很成熟,但不能做到精确控制和反馈。因此在新能源汽车和自动化控制汽车上开始使用电动制动助力装置,比较具有代表性的是:特斯拉使用的博士ibooster线控助力。有一个明显的缺陷,踩下刹车瞬间要先克服减速机构阻力和摩擦阻力,系统才能起作用,没有缓冲空间,使用中会出现机构反弹和发卡现象,严重危及行车安全。
发明内容
为了克服现有技术的不足,本发明提供一种汽车电子制动助力装置,不仅能够很好的解决现有电子制动助力器的反弹和发卡缺陷,还能使制动更省力,提高了驾控舒适性。
本发明解决其技术问题所采用的技术方案是:电机经过减速齿轮驱动齿条轴,在外壳内做直线往复运动,制动总泵设置在齿条轴前端,齿条轴顶动制动总泵活塞往复工作。齿条轴后端外侧与外壳之间设置回位簧,齿条轴后部为空管结构,制动顶杆前端设置在齿条轴空管内,制动顶杆前端与齿条轴空管封闭端设置一定的间隙,制动顶杆上设置弹簧座,弹簧座与外壳之间设置顶杆回位簧,制动顶杆后端与制动臂活销连接。制动臂旋转轴上设置踏板位置传感器,制动臂上部设置制动灯开关,制动臂下端设置制动踏板。制动灯开关和踏板位置传感器信号传递到控制器,控制器根据制动灯开关和踏板位置传感器信号,控制电机的输出扭矩,踏板位置传感器信号和电机输出扭矩成正比。
汽车正常行驶时,制动踏板在最上方位置,制动灯开关无信号,踏板位置传感器输出最小信号或无信号输出,电机不工作。
开始制动时,踩下制动踏板初始,制动踏板带动踏板臂、制动臂旋转轴,围绕踏板臂旋转轴向下旋转,制动顶杆和踏板臂活销连接,制动顶杆克服顶杆回位簧的弹力,在齿条轴后部空管内向前运动。
由于制动臂旋转轴上设置踏板位置传感器,制动臂上部设置制动灯开关,制动臂下端设置制动踏板。制动踏板位置下移,带动制动臂、制动臂旋转轴旋转运动瞬间,踏板位置传感器就能输出制动踏板位移信号,随着制动踏板向下移动,输出信号逐渐增大。制动灯开关接通,向控制器输出踏板位置传感器信号和制动灯开关信号。控制器根据接收到踏板位置传感器信号,控制电源向电机输出小扭矩电流。电机经过减速齿轮驱动齿条轴向前直线运动,由于制动总泵设置在齿条轴前端,齿条轴顶动制动总泵活塞向前工作;当电机扭矩与制动总泵活塞和齿条轴回位簧阻力平衡时,齿条轴不再向前运动,制动总泵保持压力不变。继续向下踩动制动踏板,制动踏板带动踏板臂、制动臂旋转轴,围绕踏板臂旋转轴向下旋转更大角度,
大,同时控制器控制电机增大扭矩,带动齿条轴向前运动。制动顶杆前端始终与齿条轴封闭端保持有间隙,踩下制动踏板的作用力始终只是克服顶杆回位簧的力,就能达到最大的制动力,从而实现了很好的助力效果。
当踏板位置传感器失效时,控制器根据制动灯开关信号,控制电机输出一个固定扭矩电流,驱动齿条轴对制动总泵工作,进行辅助助力制动。
刹车结束,松开制动踏板时,在制动顶杆回位簧的作用下,制动顶杆向后移动,制动臂、制动踏板、制动臂旋转轴一起向上旋转移动,踏板位置传感器信号减小,控制器控制电机输出扭矩同时减小,齿条轴在制动总泵压力和齿条轴回位簧的共同作用下向后移动,制动总泵的制动力减小。当制动踏板回到最上位置时,制动灯开关关闭,不再输出信号,踏板位置传感器输出最小信号或不再输出信号,控制器关闭电机电源,电机无扭矩输出,制动总泵复位。
本发明的有益效果是:用电子自动控制电机力矩代替真空刹车助力系统,制动反应精确灵敏,助力效果良好,特别适用在新能源汽车和自动化驾驶汽车上,具有不可替代的作用。
附图说明
下面结合附图和实施例对本发明进一步说明。
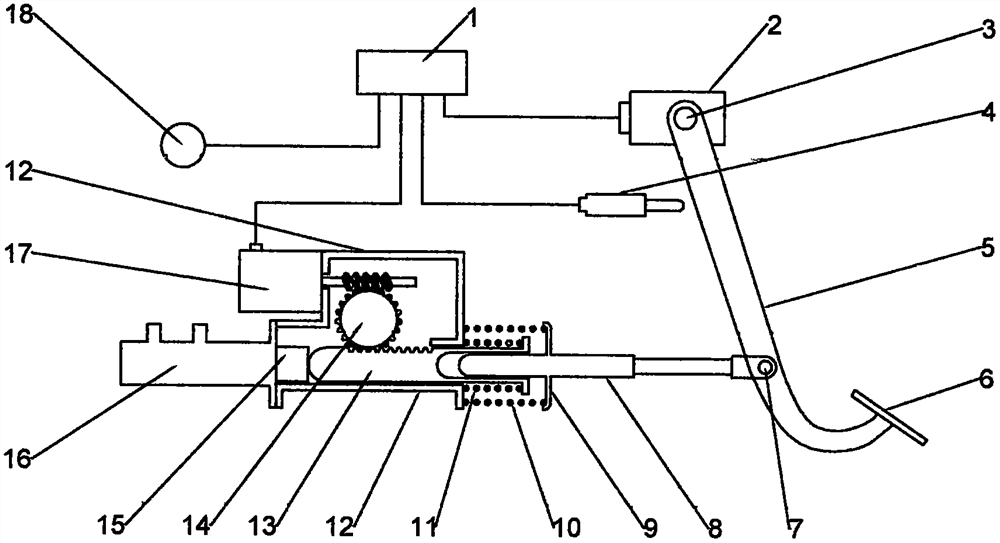
图1是汽车电子制动助力装置的结构图。
图中1.控制器,2.踏板位置传感器,3.踏板臂旋转轴,4.制动灯开关,5.踏板臂,6.踏板,7. 活销,8.制动顶杆,9.弹簧座,10.制动顶杆回位簧,11.齿条轴回位簧,12.外壳,13.齿轮轴,14.减速齿轮,15.制动总泵活塞,16.制动总泵,17.电机,18.电源。
具体实施方式
在图1中,开始制动时,踩下制动踏板6初始,制动踏板6带动踏板臂5、制动臂旋转轴3,围绕踏板臂旋转轴3向下旋转,制动顶杆8和踏板臂5活销7连接,制动顶杆8克
服顶杆回位簧9的弹力,在齿条轴13后部空管内向前运动。踏板位置传感器2输出信号逐渐增大,制动灯开关4接通,控制器1根据接收到踏板位置传感器2的信号,控制电源18向电机17输出小扭矩电流。电机17经过减速齿轮14驱动齿条轴13向前直线运动,齿条轴13顶动制动总泵活塞15向前工作;当电机17扭矩与制动总泵活塞15和齿条轴回位簧11阻力平衡时,齿条轴13不再向前运动,制动总泵16保持压力不变。
继续向下踩动制动踏板6,制动踏板6带动踏板臂5、制动臂旋转轴3,围绕踏板臂旋转轴3向下旋转更大角度,踏板位置传感器2向控制器1输出信号加大,控制器1控制电机17输出扭矩同步增大。齿条轴13顶动制动总泵活塞15继续向前运动,制动总泵16产生更大的压力,汽车制动力同步增大。当电机 17扭矩与制动总泵活塞15和齿条轴回位簧11阻力再次平衡时,齿条轴13不再向前运动,制动总泵16保持压力不变。
由于制动顶杆8前端设置在齿条轴13后端空管内,与空管封闭端有一定的间隙,制动顶杆8向前移动的同时,踏板位置传感器2输出信号也在增大,同时控制器1控制电机17增大扭矩,带动齿条轴13向前运动。制动顶杆8前端始终与齿条轴13封闭端保持有间隙,踩下制动踏板6的作用力始终只是克服顶杆回位簧10的力,就能达到最大的制动力,从而实现了很好的助力效果。
当踏板位置传感器3失效时,控制器1根据制动灯开关4信号,控制电机17输出一个固定扭矩电流,驱动齿条轴13对制动总泵16进行辅助助力制动。
刹车结束,松开制动踏板6时,制动顶杆回位簧10的作用力,通过弹簧座9迫使制动顶杆8向后移动,活销7、制动臂5、制动踏板6、制动臂旋转轴3一起向上旋转移动,踏板位置传感器2信号减小,控制器1控制电机17输出扭矩同时减小,齿条轴13在制动总泵活塞15压力和齿条轴回位簧11的共同作用下向后移动,制动总泵16的制动力减小。当制动踏板2同到最上位置时,制动灯开关4关闭,不再输出信号,踏板位置传感器2输出最小信号或不再输出信号,控制器1关闭电机17电源,电机17无扭矩输出,制动总泵15复位。
- 一种汽车电子制动助力器入力杆及汽车电子制动助力器
- 一种汽车电子制动助力装置