一种踝膝联动步行辅助装置
文献发布时间:2023-06-19 13:51:08
技术领域
本发明属于医疗器械领域,尤其涉及一种踝膝联动步行辅助装置。
背景技术
步行能力的改善对脑卒中患者的ADL能力来说至关重要,受下肢异常运动模式及肌肉痉挛的影响,脑卒中患者常表现出画圈步态,同时伴有膝反张和足下垂内翻两种病理特征。
现有的步行训练辅助方法有很多:如绑带法和借助踝足矫形器或下肢康复机器人训练法。其中绑带法和借助踝足矫形器的步行训练辅助方法比较简单,但舒适性差、效果差,忽略了下肢各关节在步行中的协调性和各种运动反射的相关性,也无法动态进行调整;而下肢康复机器人价格昂贵,医院尚未普及,而且穿脱繁琐,整体疗效判定目前尚未明确,不适合在非医院环境使用。
发明内容
本发明的目的是提供一种踝膝联动步行辅助装置,以解决现有步行训练辅助方法治疗效果不佳或设备昂贵不能普及使用的问题。本发明所采用的技术方案如下:
一种踝膝联动步行辅助装置,包括膝关节穿戴体、足踝穿戴体和若干拉线;膝关节穿戴体上设有若干万向环,足踝穿戴体的足前掌部左右两侧分别设有沿足长方向设置的滑槽,若干拉线的一端分别与滑动设置在滑槽内的若干滑动螺钉一一对应连接,若干拉线的另一端分别与若干万向环一一对应连接,若干拉线均通过锁线扣调节长度,若干滑动螺钉上均设有锁紧螺母,并通过锁紧螺母固定滑动螺钉的位置。
进一步的,膝关节穿戴体包括裹膝片和束带,裹膝片通过束带绑缚于膝盖上,束带包括两个横调节织带和两个斜调节织带;裹膝片左右任一侧的下端均设有一个斜调节织带,两个斜调节织带分别向左右两侧的斜上方延伸,裹膝片上端的左右两侧各设有挂袢,两个横调节织带分别水平设置在裹膝片的上下两端。
进一步的,裹膝片的中部设有若干透气孔或裹膝片的中部设有洞口。
进一步的,足踝穿戴体包括足托和绑带,足托上设有用于固定前足和踝部的绑带,足托底设有与鞋底足前掌部相匹配的缺口,缺口的左右两侧分别设有滑槽。
进一步的,足托下端面设有防滑垫,防滑垫为带防滑纹的橡胶防滑垫、PVC防滑垫、PU防滑垫、AB胶防滑垫、硅胶防滑垫或魔力胶防滑垫中的一种。
进一步的,拉线为金属丝。
进一步的,还包括拉力测量模块、主控与数据存储模块、电源管理模块、无线传输模块和状态显示与USB模块;拉力测量模块包括拉力传感器和AD转换电路,每一根拉线上均设有拉力传感器,拉力传感器与AD转换电路电连接,AD转换电路、电源管理模块、无线传输模块和状态显示与USB模块分别与主控与数据存储模块电连接。
进一步的,拉力传感器两端的拉力传递部分分别通过关节轴承与拉线连接。
进一步的,拉力传感器测量范围为50g~50kg,分辨率为50g,采样周期为100ms。
进一步的,主控与数据存储模块所用主控芯片为MSP430F5438芯片。
与现有技术相比,本发明的有益效果在于:
1、膝关节穿戴体上设有若干万向环,足踝穿戴体的足前掌部左右两侧分别设有沿足长方向设置的滑槽,若干拉线的一端分别与滑动设置在滑槽内的若干滑动螺钉一一对应连接,若干拉线的另一端分别与若干万向环一一对应连接,若干拉线均通过锁线扣调节长度,若干滑动螺钉上均设有锁紧螺母,并通过锁紧螺母固定滑动螺钉的位置,通过调节若干拉线的长度和滑动螺钉的位置来动态调整各拉线的张紧角度及张紧力,以拉线的拉力限制足踝的姿态,控制膝微屈在10度以内,踝背屈大于0度,保证了每次运动训练的一致性,通过反复练习,重建运动动力定型,形成动作反射而使步态固定下来。利用开链与闭链运动原理,通过踝膝联合限制远端运动自由度,强化近端控制,减少远端异常模式,达到节力和辅助治疗的目的。通过实际应用发现,在初始阶段拉线受到的拉力较大,随后逐渐减小,说明控制膝微屈在10度以内和踝背屈大于0度所需要的力越来越小,踝膝联合控制对步行启动的强化控制对异常模式及伸肌张力的抑制起到关键性作用。
2、踝膝关节控制肌多为双关节肌,通常表现为一端收缩而另一端配合伸展;双关节肌协调性下降是诱发足下垂内翻、膝反张的重要原因。踝膝联合通过各部分佩戴装置抑制跖屈、促进屈膝,减少诱发伸肌痉挛,利用交互抑制反射原理,踝膝联合强化了屈曲运动,反射性抑制伸肌张力,有效缓解伸肌痉挛,强化交互抑制。
3、每一根拉线上均设有数据采集装置,通过数据采集装置可以直接测定与显示相关肌肉张力大小,绘制角度与拉力及功能变化的相关性曲线,为神经运动反馈控制提供科学依据,指导治疗与科研。
4、裹膝片左右任一侧的下端均设有一个斜调节织带,两个斜调节织带分别向左右两侧且倾斜向上延伸,裹膝片上端的左右两侧各设有挂袢,两个横调节织带分别水平设置在裹膝片的上下两端。穿戴时,裹膝片由前侧裹住膝关节,左下方的斜调节织带由腘窝向上环绕膝关节与右上方的挂袢相连接,右下方的斜调节织带由腘窝向上环绕膝关节与左上方的挂袢相连接,膝关节穿戴体应用了反“8”字的佩戴方式,对膝反张的矫正具有良好的功效。
5、制作简单,穿戴方便,动态可调,无不适感,不受时间、场地、环境的限制,可长时、多场合使用。
6、数据采集装置通过关节轴承与拉线相连,可进行任意方向拉力的测量,拉力的测量范围为:50g~50kg,分辨率为50g,满足患者使用需求。
7、主控与数据存储模块所用主控芯片为MSP430F5438芯片,MSP430F5438芯片具有256K闪存、16KRAM、255MH的MCU、RTC时钟模块,可满足本装置快速数据处理和存储需求,可实时连续记录拉力数据,在拉力传感器的采样周期为100ms的情况下,最长可记录10天的拉力测量数据。
8、本装置测量数据的显示、处理、参数设定均可以通过无线方式连接手机或平板电脑等设备进行操作,便于用户使用。
9、本装置采用超低功耗设计,能够支持系统的长期工作。所有器件均采用低功耗器件,而且电源管理模块、无线传输模块、拉力测量模块等均可通过主控模块控制它们的工作状态。通过监测拉力传感器的工作状态,可以使本装置在最低功耗-工作状态之间自动转换,从而实现低功耗控制。
附图说明
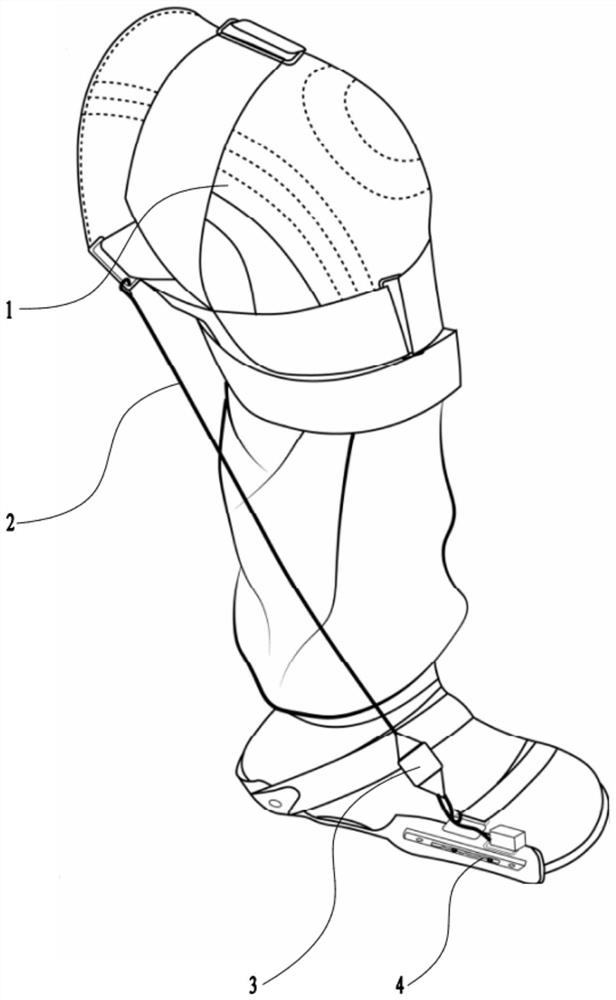
图1是本发明的穿戴示意图;
图2是膝关节穿戴体的示意图;
图3是足踝穿戴体的示意图;
图4是滑动螺钉与滑槽部分示意图;
图5是数据采集装置的示意图;
图6是拉力测量模块电路图;
图7是主控与数据存储模块电路图;
图8是电源管理模块电路图;
图9是无线传输模块电路图;
图10是状态显示与USB模块电路图;
图中:1-膝关节穿戴体、11-横调节织带、12-斜调节织带、13-裹膝片、14-挂袢、15-透气孔、16-万向环、2-拉线、3-拉力传感器、4-足踝穿戴体、41-足托、42-鞋底防滑垫、43-滑动螺钉、44-滑槽、45-锁紧螺母、U1-数据采集装置包括拉力测量模块、U2-主控与数据存储模块、U3-电源管理模块、U4-无线传输模块、U5-状态显示与USB模块。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
本发明所提到的连接分为固定连接和可拆卸连接,所述固定连接即为不可拆卸连接包括但不限于折边连接、铆钉连接、粘结连接和焊接连接等常规固定连接方式,所述可拆卸连接包括但不限于螺栓连接、卡扣连接、销钉连接和铰链连接等常规拆卸方式,未明确限定具体连接方式时,默认可在现有连接方式中找到至少一种连接方式实现该功能,本领域技术人员可根据需要自行选择。例如:固定连接选择焊接连接,可拆卸连接选择螺栓连接。
以下将结合附图,对本发明作进一步详细说明,以下实施例是对本发明的解释,而本发明并不局限于以下实施例。
如图所示,一种踝膝联动步行辅助装置,包括膝关节穿戴体1、足踝穿戴体4和若干拉线2;膝关节穿戴体1上设有若干万向环16,足踝穿戴体4的足前掌部左右两侧分别设有沿足长方向设置的滑槽44,若干拉线2的一端分别与滑动设置在滑槽44内的若干滑动螺钉43一一对应连接,若干拉线2的另一端分别与若干万向环16一一对应连接,若干拉线2均可通过锁线扣调节长度,若干滑动螺钉43上均设有锁紧螺母47,并可通过锁紧螺母47固定滑动螺钉43的位置。通过调节若干拉线2的长度和滑动螺钉43的位置来动态调整各拉线2的张紧角度及张紧力,以拉线2的拉力限制足踝的姿态,控制膝微屈在10度以内,踝背屈大于0度,保证了每次运动训练的一致性,通过反复练习,重建运动动力定型,形成动作反射而使步态固定下来,利用开链与闭链运动原理,通过踝膝联合限制远端运动自由度,强化近端控制,减少远端异常模式,达到节力和辅助治疗的目的。通过实际应用发现,在初始阶段拉线受到的拉力较大,随后逐渐减小,说明控制膝微屈在10度以内和踝背屈大于0度所需要的力越来越小,踝膝联合控制对步行启动的强化控制对异常模式及伸肌张力的抑制起到关键性作用。
膝关节穿戴体1包括裹膝片13和束带,裹膝片13通过束带绑缚于膝关节上,束带包括两个横调节织带11和两个斜调节织带12;裹膝片13左右任一侧的下端均设有一个斜调节织带12,两个斜调节织带12分别向左右两侧的斜上方延伸,裹膝片13上端的左右两侧各设有挂袢14,两个横调节织带11分别水平设置在裹膝片13的上下两端。穿戴时,裹膝片13由前侧裹住膝关节,左下方的斜调节织带12由腘窝向上环绕膝关节与右上方的挂袢14相连接,右下方的斜调节织带12由腘窝向上环绕膝关节与左上方的挂袢14相连接,膝关节穿戴1体应用了反“8”字的佩戴方式,对膝反张的矫正具有良好的功效。
裹膝片13的中部设有若干透气孔15或裹膝片13的中部设有洞口,进一步提升膝关节穿戴体1使用时的舒适度。
足踝穿戴体4包括足托41和绑带46,足托41底设有与鞋底足前掌部相匹配的缺口45,缺口45的左右两侧分别设有滑槽44,足托41上设有用于固定前足和踝部的绑带46,缺口45的设置可使患者穿鞋佩戴足踝穿戴体时足前掌触地,便于迈步过程中的足掌弯曲。
足托41下端面设有防滑垫42,防滑垫42为带防滑纹的橡胶防滑垫、PVC防滑垫、PU防滑垫、AB胶防滑垫、硅胶防滑垫或魔力胶防滑垫中的一种,为穿戴者行走增加摩擦力,提高足踝穿戴体4的防滑性。
拉线2为金属丝,使拉线2可柔性弯曲的同时没有太大的弹性,以便使拉力传感器3采集的数据更精准。
还包括拉力测量模块U1、主控与数据存储模块U2、电源管理模块U3、无线传输模块U4和状态显示与USB模块U5;拉力测量模块U1包括拉力传感器3和AD转换电路,每一根拉线2上均设有拉力传感器3,拉力传感器3与AD转换电路电连接,AD转换电路、电源管理模块U3、无线传输模块U4和状态显示与USB模块U5分别与主控与数据存储模块U2电连接,无线传输模块U4可与智能手机或平板电脑通过蓝牙连接。拉力传感器3采集的拉力数据通过滤波电路和放大电路处理后,由AD转换电路转换为电信号输送给主控与数据存储模块U2,主控与数据存储模块U2是本装置的核心单元,主要用于拉力数据的处理和存储,以及拉力的采集、无线传输和电源管理等的控制。本发明采用超低功耗微处理器芯片MSP430F5438作为主控芯片,MSP430F5438内部具有256K闪存、16KRAM、255MH的MCU、RTC时钟模块,可满足本装置快速数据处理和存储需求,MSP430F5438具有灵活的时钟源,可以使器件达到最低的功率消耗,并可使器件从低功耗模式在6μs内迅速唤醒。
MSP430F5438使得主控模块可以同时实现数据处理单元、存储单元、时钟单元,无需再单独设计数据存储和时钟模块,能够降低了电路设计的复杂性,减少控制电路的体积。电源管理模块U3为可以在较低的电压下工作,只要电源电压大于0.9V,电源管理模块U3就能通过DC/DC转换稳定输出3.3V电压。在外部电源提供的电压不低于2.0V时,或系统处于低功耗状态时,可以使电源模块处于关闭模式,即使其工作在低功耗状态,在关闭模式下,外部电源不经过U3的DC/DC转换,直接给系统供电。电源管理模块U3的工作电流为37μA,而在关闭模式下,只有2μA的控制电流。无线传输模块U4是单片射频收发器,工作电压为1.9~3.6V,工作于2.4GHz ISM(工业、科学和医学)频道,频道之间的转换时间小于650μs。无线传输模块U4由频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,不需外加声表滤波器,自动处理字头和CRC(循环冗余码校验),使用SPI接口与微处理器通信,无线传输模块U4可与智能手机或平板电脑通过蓝牙连接用于传输数据。状态显示与USB接口模块U5为本装置提供工作状态显示、USB数据通信和充电接口。工作状态显示包括电池工作状态、充电状态、电量不足、数据传输状态、错误状态等状态显示。
拉力传感器3两端的拉力传递部分分别通过关节轴承与拉线2连接,使拉力传感器3可以从任意角度与拉线2相连接。拉力传感器3通过关节轴承与拉线相连,可进行任意方向拉力的测量,拉力的测量范围为:50g~50kg,满足患者使用需求,分辨率为50g,采样周期为100ms,满足数据采集需求。
主控与数据存储模块U2所用主控芯片为MSP430F5438芯片,MSP430F5438芯片具有256K闪存、16KRAM、255MH的MCU、RTC时钟模块,可满足本装置快速数据处理和存储需求,可实时连续记录拉力数据,在拉力传感器采样周期为100ms的情况下,最长可记录10天的拉力测量数据。
以上实施例只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。
- 一种踝膝联动步行辅助装置
- 具有辅助侧摆机构的无膝欠驱动仿生双足步行机