一种新型绿豆收割机及绿豆收割方法
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及农业领域,更具体的说是一种新型绿豆收割机及绿豆收割方法。
背景技术
近年来国家加大各领域科研的投入,随之也加快了农业设备的研发,在大面积和自动化集中化的种植业的时代背景下渐渐的利用科技产物替代一些传统的人工采摘方法。例如:CN203057857U,一种绿豆收割机,属于农业机械领域。本实用新型的目的是提供一种专门对应收割绿豆的绿豆收割机。本实用新型的前支架和后支架通过立柱和套管插接,前支架前段罩有分秧罩,分秧罩上固定安装有分株杆,并且分秧罩顶尖部位安装有挂钩,行走轮轴连接在前支架上;在后支架上固定安装有前、中、后三个立管,调整机构通过调整螺栓安装在前、后立管顶端,割刀通过连接板连接在固定套上,固定套和前立管、中立管插接;在后支架上轴连接有地轮。本实用新型结构简单,构造合理,是专门对应绿豆作物的收割机械,不但减少了对绿豆颗粒的损害,也减少了农户的劳动强度,大大的提高了收割工作效率。该发明容易将多株绿豆丛属直接拽起,后期豆荚分离困难。例如:CN207978360U,小型绿豆收割机,本实用新型公开了一种小型绿豆收割机,包括行走机构和设置在行走机构上的收割机构,其特征在于:所述收割机构包括割秧装置、接种装置和剥种装置,所述接种装置包括至少两条并列设置的接种板,沿所述接种板的边缘处设置有传动链条,所述传动链条由多个链节依次铰接而成,沿所述传动链条的传动方向上设置有一圈柔性的挡边,所述挡边的内侧边沿与所述链节的上端面连接,所述挡边的外侧边沿向接种板外侧延伸,两相邻接种板之间的两条挡边外侧边沿彼此紧邻。本实用新型的小型绿豆收割机可有效地解决绿豆采摘时绿豆夹迸裂造成绿豆回收率低的技术问题。不便于绿豆丛的采摘,分株机构单一。
发明内容
本发明的目的是提供一种新型绿豆收割机及绿豆收割方法,通过第一电机控制系统、第二电机控制系统分别实现对分离采摘转头及第一搅拌驱动总成、第二搅拌驱动总成的控制,通过分离采摘转头实现对绿豆丛的牵扯,通过第一去根总成、第二去根总成夹剪绿豆丛根部,最后滚动至由第一搅拌驱动总成、第二搅拌驱动总成的控制的搅拌分离总成中搅拌分离,掉入至流水线,由此输入至集料框中,通过第一电机控制系统、第二电机控制系统实现采摘转头的速度与搅拌分离的速度呈一定比例,可通过调整致使转动速率不同形成差速效果,提高收割效率。
本发明的目的通过以下技术方案来实现:
一种新型绿豆收割机,其特征在于:包括第一去根总成、第二去根总成、第一电机控制系统、第二电机控制系统、第一搅拌驱动总成、第二搅拌驱动总成、框架总成、搅拌分离总成,第一去根总成、第二去根总成、第一电机控制系统、第二电机控制系统、第一搅拌驱动总成、第二搅拌驱动总成、搅拌分离总成均与框架总成相连接,第一电机控制系统与第一去根总成、第一搅拌驱动总成相连接,第二电机控制系统与第二去根总成、第二搅拌驱动总成相连接,第一搅拌驱动总成、第二搅拌驱动总成均与搅拌分离总成相连接。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第一去根总成包括电机A、链轮A、链条A、链轮B、轴A、支撑总成A、凹槽鼓圆柱、凹槽滑块、轴B、轴C、轴固定块A、铲刀,电机A其输出轴与链轮A固定连接,链轮A通过链条A与链轮B转动连接,链轮B、凹槽鼓圆柱均与轴A固定连接,轴A与支撑总成A转动连接,凹槽滑块与支撑总成A连接,轴B、轴C均与凹槽滑块、轴固定块A固定连接,轴固定块A与铲刀固定连接。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第二去根总成所含部件均与第一去根总成相同,其装配方式、顺序均与第一去根总成相同,其运行顺序、实现功能均与第一去根总成相同。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第一电机控制系统包括电机B、联轴器A、轴D、轴固定座A、涡轮、蜗杆、带轴齿轮A、双齿齿轮A、双齿齿轮B、双齿齿轮C、双齿齿轮D、带轴齿轮B、轴固定座B、带轮A、皮带A、带轮B、连杆轴A、连杆轴B、Z型连杆、连杆轴C、连杆轴D、轴固定座C、轴固定座D、轴固定座E、环形连杆轴A、锥齿轮A、锥齿轮B、锥齿轮C、锥齿轮D、环形连杆轴B、直角齿轮块A、齿轮块连接轴、直角齿轮块B、直角齿轮块C、直角齿轮块D、直角齿轮块E、直角齿轮块F、直角齿轮块G、直角齿轮块H,机B通过联轴器A与轴D固定连接,轴D与轴固定座A转动连接,轴D与涡轮、带轮A固定连接,涡轮与蜗杆啮合连接,蜗杆与带轴齿轮A固定连接,带轴齿轮A与双齿齿轮A啮合连接,双齿齿轮A与双齿齿轮B啮合连接,双齿齿轮B与双齿齿轮C啮合连接,双齿齿轮C与双齿齿轮D啮合连接,双齿齿轮D与带轴齿轮B啮合连接,带轮A通过皮带A与带轮B转动连接,带轮B与连杆轴A固定连接,连杆轴A通过连杆轴B与Z型连杆转动连接,Z型连杆通过连杆轴C与连杆轴D转动连接,连杆轴A、连杆轴D均与轴固定座C转动连接,连杆轴D与环形连杆轴A固定连接,环形连杆轴A与环形连杆轴B转动连接,锥齿轮A、锥齿轮B、锥齿轮C、锥齿轮D均与环形连杆轴A转动连接,锥齿轮A通过锥齿轮B与锥齿轮C啮合连接,锥齿轮C与锥齿轮D啮合连接,连杆轴D、锥齿轮D均与轴固定座E转动连接,直角齿轮块A、直角齿轮块B、直角齿轮块C、直角齿轮块D、直角齿轮块E、直角齿轮块F、直角齿轮块G、直角齿轮块H均与齿轮块连接轴转动连接,直角齿轮块A、直角齿轮块H均与环形连杆轴B转动连接,直角齿轮块E、直角齿轮块F、直角齿轮块G均与直角齿轮块H啮合连接,直角齿轮块A通过直角齿轮块B、直角齿轮块C、直角齿轮块D与直角齿轮块E、直角齿轮块F、直角齿轮块G啮合连接。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第二电机控制系统所含部件均与第一电机控制系统相同,其装配方式、顺序均与第一电机控制系统相同,其运行顺序、实现功能均与第一电机控制系统相同。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第一搅拌驱动总成包括三通连杆轴A、齿轮A、齿轮B、齿轮C、齿轮D、三通连杆轴B、齿轮E、带轴连杆A、三角齿轮A、带轴连杆B、三角齿轮B、带轴连杆C、三角齿轮C、齿环A、齿环B,齿轮A、齿轮B、齿轮C均与三通连杆轴A转动连接,齿轮A、齿轮B、齿轮C均与齿轮D、齿环A啮合连接,齿轮D与三通连杆轴B固定连接,齿轮E、带轴连杆A、带轴连杆B、带轴连杆C均与三通连杆轴B转动连接,带轴连杆A与三角齿轮A转动连接,带轴连杆B与三角齿轮B转动连接,带轴连杆C与三角齿轮C转动连接,三角齿轮A、三角齿轮B、齿轮C均与齿环B啮合连接。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述第二搅拌驱动总成所含部件均与第一搅拌驱动总成相同,其装配方式、顺序均与第一搅拌驱动总成相同,其运行顺序、实现功能均与第一搅拌驱动总成相同。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述框架总成包括框架、轮组、盖板A、盖板B、传送带、集料框、分离采摘转头,框架与轮组转动连接,盖板A、盖板B、集料框均与框架固定连接,分离采摘转头与框架转动连接。
作为本技术方案的进一步优化,本发明一种新型绿豆收割机,所述搅拌分离总成包括分离转刀A、分离转刀B、分离转刀C、搅拌板。
一种绿豆收割方法,具体通过上文权利要求中的一种新型绿豆收割机来实现,包括以下步骤:
S1、启动第一电机控制系统3、第二电机控制系统4,分别控制第一搅拌驱动总成5、第二搅拌驱动总成6,扯动绿豆荚丛,过程包括如下:
S1.1、启动电机B3-1,带动链轮A转动,带动轴D3-3转动,带动带轴齿轮A3-7转动,带动带轴齿轮B3-12转动,带动第一搅拌驱动总成5转动;
S1.2、轴D3-3转动带动连杆轴A3-17转动,带动环形连杆轴A3-25转动,带动锥齿轮D3-29转动,带动分离采摘转头7-7转动,分离采摘转头7-7从绿豆荚丛底部插入挑起;
S2、启动第一去根总成1、第二去根总成2,伸出夹断绿豆荚丛中下部的根茎,过程包括如下:
S2.1、启动电机A1-1,带动链轮B1-4转动,带动铲刀1-12前伸,与第二去根总成2形成夹击去除绿豆丛中下部的根茎;
S3、继续启动第一搅拌驱动总成5、第二搅拌驱动总成6,将夹断后的绿豆丛倒入至框架总成7,通过搅拌分离总成8将绿豆丛分离绿豆荚和枝叶分离,运输至集料箱中,过程包括如下:
S3.1、带轴齿轮B3-12转动带动三通连杆轴A5-1转动,带动齿轮D5-5转动,带动齿轮E5-7转动,带动三角齿轮A5-9、三角齿轮B5-11、三角齿轮C5-13转动,带动分离转刀A8-1、分离转刀B8-2、分离转刀C8-3、搅拌板8-4转动,将枝叶与豆荚分离后掉入至传送带7-5,传输至集料框7-6中。
本发明一种新型绿豆收割机的有益效果为:
本发明的一种新型绿豆收割机及绿豆收割方法,其有益效果为:通过第一电机控制系统、第二电机控制系统分别实现对分离采摘转头及第一搅拌驱动总成、第二搅拌驱动总成的控制,通过分离采摘转头实现对绿豆丛的牵扯,通过第一去根总成、第二去根总成夹剪绿豆丛根部,最后滚动至由第一搅拌驱动总成、第二搅拌驱动总成的控制的搅拌分离总成中搅拌分离,掉入至流水线,由此输入至集料框中,通过第一电机控制系统、第二电机控制系统实现采摘转头的速度与搅拌分离的速度呈一定比例,可通过调整致使转动速率不同形成差速效果,提高收割效率。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
图1是本发明的整体结构示意图一;
图2是本发明的整体结构示意图二;
图3是本发明的第一去根总成结构示意图一;
图4是本发明的第一电机控制系统结构示意图一;
图5是本发明的第一电机控制系统结构示意图二;
图6是本发明的第一搅拌驱动总成结构示意图一;
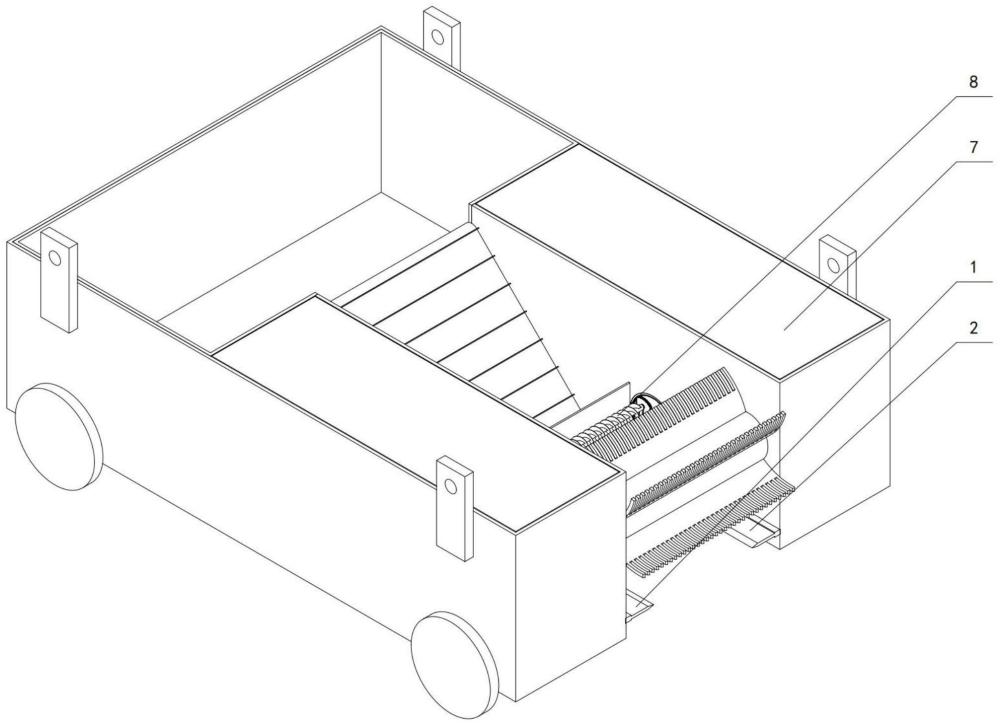
图7是本发明的框架总成结构示意图一;
图8是本发明的搅拌分离总成结构示意图一;
图中:第一去根总成1;电机A1-1;链轮A1-2;链条A1-3;链轮B1-4;轴A1-5;支撑总成A1-6;凹槽鼓圆柱1-7;凹槽滑块1-8;轴B1-9;轴C1-10;轴固定块A1-11;铲刀1-12;第二去根总成2;第一电机控制系统3;电机B3-1;联轴器A3-2;轴D3-3;轴固定座A3-4;涡轮3-5;蜗杆3-6;带轴齿轮A3-7;双齿齿轮A3-8;双齿齿轮B3-9;双齿齿轮C3-10;双齿齿轮D3-11;带轴齿轮B3-12;轴固定座B3-13;带轮A3-14;皮带A3-15;带轮B3-16;连杆轴A3-17;连杆轴B3-18;Z型连杆3-19;连杆轴C3-20;连杆轴D3-21;轴固定座C3-22;轴固定座D3-23;轴固定座E3-24;环形连杆轴A3-25;锥齿轮A3-26;锥齿轮B3-27;锥齿轮C3-28;锥齿轮D3-29;环形连杆轴B3-30;直角齿轮块A3-31;齿轮块连接轴3-32;直角齿轮块B3-33;直角齿轮块C3-34;直角齿轮块D3-35;直角齿轮块E3-36;直角齿轮块F3-37;直角齿轮块G3-38;直角齿轮块H3-39;第二电机控制系统4;第一搅拌驱动总成5;三通连杆轴A5-1;齿轮A5-2;齿轮B5-3;齿轮C5-4;齿轮D5-5;三通连杆轴B5-6;齿轮E5-7;带轴连杆A5-8;三角齿轮A5-9;带轴连杆B5-10;三角齿轮B5-11;带轴连杆C5-12;三角齿轮C5-13;齿环A5-14;齿环B5-15;第二搅拌驱动总成6;框架总成7;框架7-1;轮组7-2;盖板A7-3;盖板B7-4;传送带7-5;集料框7-6;分离采摘转头7-7;搅拌分离总成8;分离转刀A8-1;分离转刀B8-2;分离转刀C8-3;搅拌板8-4。
具体实施方式
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
下面结合图1-8说明本实施方式,一种新型绿豆收割机,包括第一去根总成1、第二去根总成2、第一电机控制系统3、第二电机控制系统4、第一搅拌驱动总成5、第二搅拌驱动总成6、框架总成7、搅拌分离总成8,第一去根总成1、第二去根总成2、第一电机控制系统3、第二电机控制系统4、第一搅拌驱动总成5、第二搅拌驱动总成6、搅拌分离总成8均与框架总成7相连接,第一电机控制系统3与第一去根总成1、第一搅拌驱动总成5相连接,第二电机控制系统4与第二去根总成2、第二搅拌驱动总成6相连接,第一搅拌驱动总成5、第二搅拌驱动总成6均与搅拌分离总成8相连接。
具体实施方式二:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一去根总成1包括电机A1-1、链轮A1-2、链条A1-3、链轮B1-4、轴A1-5、支撑总成A1-6、凹槽鼓圆柱1-7、凹槽滑块1-8、轴B1-9、轴C1-10、轴固定块A1-11、铲刀1-12,电机A1-1其输出轴与链轮A1-2固定连接,链轮A1-2通过链条A1-3与链轮B1-4转动连接,链轮B1-4、凹槽鼓圆柱1-7均与轴A1-5固定连接,轴A1-5与支撑总成A1-6转动连接,凹槽滑块1-8与支撑总成A1-6连接,轴B1-9、轴C1-10均与凹槽滑块1-8、轴固定块A1-11固定连接,轴固定块A1-11与铲刀1-12固定连接;
启动电机A1-1,带动链轮B1-4转动,带动铲刀1-12前伸,与第二去根总成2形成夹击去除绿豆丛中下部的根茎。
具体实施方式三:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二去根总成2所含部件均与第一去根总成1相同,其装配方式、顺序均与第一去根总成1相同,其运行顺序、实现功能均与第一去根总成1相同。
具体实施方式四:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一电机控制系统3包括电机B3-1、联轴器A3-2、轴D3-3、轴固定座A3-4、涡轮3-5、蜗杆3-6、带轴齿轮A3-7、双齿齿轮A3-8、双齿齿轮B3-9、双齿齿轮C3-10、双齿齿轮D3-11、带轴齿轮B3-12、轴固定座B3-13、带轮A3-14、皮带A3-15、带轮B3-16、连杆轴A3-17、连杆轴B3-18、Z型连杆3-19、连杆轴C3-20、连杆轴D3-21、轴固定座C3-22、轴固定座D3-23、轴固定座E3-24、环形连杆轴A3-25、锥齿轮A3-26、锥齿轮B3-27、锥齿轮C3-28、锥齿轮D3-29、环形连杆轴B3-30、直角齿轮块A3-31、齿轮块连接轴3-32、直角齿轮块B3-33、直角齿轮块C3-34、直角齿轮块D3-35、直角齿轮块E3-36、直角齿轮块F3-37、直角齿轮块G3-38、直角齿轮块H3-39,机B3-1通过联轴器A3-2与轴D3-3固定连接,轴D3-3与轴固定座A3-4转动连接,轴D3-3与涡轮3-5、带轮A3-14固定连接,涡轮3-5与蜗杆3-6啮合连接,蜗杆3-6与带轴齿轮A3-7固定连接,带轴齿轮A3-7与双齿齿轮A3-8啮合连接,双齿齿轮A3-8与双齿齿轮B3-9啮合连接,双齿齿轮B3-9与双齿齿轮C3-10啮合连接,双齿齿轮C3-10与双齿齿轮D3-11啮合连接,双齿齿轮D3-11与带轴齿轮B3-12啮合连接,带轮A3-14通过皮带A3-15与带轮B3-16转动连接,带轮B3-16与连杆轴A3-17固定连接,连杆轴A3-17通过连杆轴B3-18与Z型连杆3-19转动连接,Z型连杆3-19通过连杆轴C3-20与连杆轴D3-21转动连接,连杆轴A3-17、连杆轴D3-21均与轴固定座C3-22转动连接,连杆轴D3-21与环形连杆轴A3-25固定连接,环形连杆轴A3-25与环形连杆轴B3-30转动连接,锥齿轮A3-26、锥齿轮B3-27、锥齿轮C3-28、锥齿轮D3-29均与环形连杆轴A3-25转动连接,锥齿轮A3-26通过锥齿轮B3-27与锥齿轮C3-28啮合连接,锥齿轮C3-28与锥齿轮D3-29啮合连接,连杆轴D3-21、锥齿轮D3-29均与轴固定座E3-24转动连接,直角齿轮块A3-31、直角齿轮块B3-33、直角齿轮块C3-34、直角齿轮块D3-35、直角齿轮块E3-36、直角齿轮块F3-37、直角齿轮块G3-38、直角齿轮块H3-39均与齿轮块连接轴3-32转动连接,直角齿轮块A3-31、直角齿轮块H3-39均与环形连杆轴B3-30转动连接,直角齿轮块E3-36、直角齿轮块F3-37、直角齿轮块G3-38均与直角齿轮块H3-39啮合连接,直角齿轮块A3-31通过直角齿轮块B3-33、直角齿轮块C3-34、直角齿轮块D3-35与直角齿轮块E3-36、直角齿轮块F3-37、直角齿轮块G3-38啮合连接;
启动电机B3-1,带动链轮A转动,带动轴D3-3转动,带动带轴齿轮A3-7转动,带动带轴齿轮B3-12转动,带动第一搅拌驱动总成5转动。轴D3-3转动带动连杆轴A3-17转动,带动环形连杆轴A3-25转动,带动锥齿轮D3-29转动,带动分离采摘转头7-7转动,分离采摘转头7-7从绿豆荚丛底部插入挑起。
具体实施方式五:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二电机控制系统4所含部件均与第一电机控制系统3相同,其装配方式、顺序均与第一电机控制系统3相同,其运行顺序、实现功能均与第一电机控制系统3相同。
具体实施方式六:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第一搅拌驱动总成5包括三通连杆轴A5-1、齿轮A5-2、齿轮B5-3、齿轮C5-4、齿轮D5-5、三通连杆轴B5-6、齿轮E5-7、带轴连杆A5-8、三角齿轮A5-9、带轴连杆B5-10、三角齿轮B5-11、带轴连杆C5-12、三角齿轮C5-13、齿环A5-14、齿环B5-15,齿轮A5-2、齿轮B5-3、齿轮C5-4均与三通连杆轴A5-1转动连接,齿轮A5-2、齿轮B5-3、齿轮C5-4均与齿轮D5-5、齿环A5-14啮合连接,齿轮D5-5与三通连杆轴B5-6固定连接,齿轮E5-7、带轴连杆A5-8、带轴连杆B5-10、带轴连杆C5-12均与三通连杆轴B5-6转动连接,带轴连杆A5-8与三角齿轮A5-9转动连接,带轴连杆B5-10与三角齿轮B5-11转动连接,带轴连杆C5-12与三角齿轮C5-13转动连接,三角齿轮A5-9、三角齿轮B5-11、齿轮C5-13均与齿环B5-15啮合连接;
带轴齿轮B3-12转动带动三通连杆轴A5-1转动,带动齿轮D5-5转动,带动齿轮E5-7转动,带动三角齿轮A5-9、三角齿轮B5-11、三角齿轮C5-13转动,带动分离转刀A8-1、分离转刀B8-2、分离转刀C8-3、搅拌板8-4转动,将枝叶与豆荚分离后掉入至传送带7-5,传输至集料框7-6中。
具体实施方式七:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述第二搅拌驱动总成6所含部件均与第一搅拌驱动总成5相同,其装配方式、顺序均与第一搅拌驱动总成5相同,其运行顺序、实现功能均与第一搅拌驱动总成5相同。
具体实施方式八:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述框架总成7包括框架7-1、轮组7-2、盖板A7-3、盖板B7-4、传送带7-5、集料框7-6、分离采摘转头7-7,框架7-1与轮组7-2转动连接,盖板A7-3、盖板B7-4、集料框7-6均与框架7-1固定连接,分离采摘转头7-7与框架7-1转动连接。
具体实施方式九:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述搅拌分离总成8包括分离转刀A8-1、分离转刀B8-2、分离转刀C8-3、搅拌板8-4。
本发明的一种新型绿豆收割机及绿豆收割方法,其工作原理为:电机B3-1启动,其输出轴通过联轴器A3-2带动轴D3-3转动,轴D3-3通过涡轮3-5带动蜗杆3-6转动,轴D3-3带动带轮A3-14转动,带轮A3-14通过皮带A3-15带动带轮B3-16转动,带轮B3-16带动连杆轴A3-17转动,连杆轴A3-17通过连杆轴B3-18带动Z型连杆3-19转动,Z型连杆3-19通过连杆轴C3-20带动连杆轴D3-21转动,杆轴D3-21带动环形连杆轴A3-25转动,环形连杆轴A3-25带动环形连杆轴B3-30转动,环形连杆轴B3-30通过直角齿轮块A3-31、直角齿轮块H3-39带动直角齿轮块E3-36、直角齿轮块F3-37、直角齿轮块G3-38通过齿轮块连接轴3-32与直角齿轮块B3-33、直角齿轮块C3-34、直角齿轮块D3-35啮合转动,此方形齿轮的设计是利用正方形多出啮合的紧凑特性为了减轻后部分离采摘转头7-7牵扯绿豆丛时的牵扯力,加大牵扯机构的稳定性,环形连杆轴A3-25转动时通过锥齿轮A3-26带动锥齿轮B3-27转动,锥齿轮B3-27通过锥齿轮C3-28带动锥齿轮D3-29转动,锥齿轮D3-29带动分离采摘转头7-7转动实现绿豆丛的第一步分株牵扯,将分株后每株上的绿豆荚向上刮取,由于第一电机控制系统3同时控制绿豆丛牵扯以及后续的搅拌分离,为了让采摘工作更加高效,此处将用于控制第一搅拌驱动总成5的机构设定为分离采摘转头7-7的多倍转速,通过差速机构的加速使得搅拌分离的更彻底更快速,避免刮取后的绿豆荚及枝叶过多堆积造成堵塞,其细节为轴D3-3通过涡轮3-5带动蜗杆3-6转动时,蜗杆3-6带动带轴齿轮A3-7转动,带轴齿轮A3-7带动双齿齿轮A3-8转动,双齿齿轮A3-8带动双齿齿轮B3-9转动,双齿齿轮B3-9带动双齿齿轮C3-10转动,双齿齿轮C3-10带动双齿齿轮D3-11转动,通过几个双齿齿轮的不同大小齿轮及齿轮比的提速,双齿齿轮D3-11带动带轴齿轮B3-12呈带轴齿轮A3-7输入时的正比几何倍数转动,带轴齿轮B3-12带动三通连杆轴A5-1转动,三通连杆轴A5-1通过齿轮A5-2、齿轮B5-3、齿轮C5-4沿齿环A5-14转动带动齿轮D5-5转动,齿轮D5-5带动三通连杆轴B5-6转动,三通连杆轴B5-6带动带轴连杆A5-8、带轴连杆B5-10、带轴连杆C5-12转动,带轴连杆A5-8带动三角齿轮A5-9、带轴连杆B5-10带动三角齿轮B5-11、带轴连杆C5-12带动三角齿轮C5-13均通过沿齿环B5-15转动从而带动齿轮E5-7缓速转动,齿轮E5-7带动搅拌板8-4缓速转动,带轴连杆C5-12带动分离转刀A8-1转动,带轴连杆A5-8带动分离转刀B8-2转动,带轴连杆C5-12带着分离转刀C8-3转动,通过分离转刀及搅拌板8-4转速的分别控制,能更好的使分离转刀A8-1、分离转刀B8-2、分离转刀C8-3在搅拌板8-4的三角等分间隙中完成搅拌分离工作,并且由于三角齿轮A5-9、三角齿轮B5-11、三角齿轮C5-13的结构特性是在沿着齿环B5-15转动时由于三角形的形状导致的转动时会产生内缩外扩等现象,配合分离转刀的使用形成了一个张紧的搅拌效果,不会因为部分的绿豆枝叶因某处堆积密集而导致的固定点位搅拌从而导致绿豆荚大量破裂,在分离采摘转头7-7牵扯住绿豆丛刮取至一定高度时,为了避免连根拔起导致搅拌多余的枝叶,通过第一去根总成1、第二去根总成2的夹剪去除绿豆丛的中下部以下的根部,启动电机A1-1,其输出轴带动链轮A1-2转动,链轮A1-2通过链条A1-3带动链轮B1-4转动,链轮B1-4通过轴A1-5带动凹槽鼓圆柱1-7转动,凹槽鼓圆柱1-7转动带动凹槽滑块1-8沿自身的凹槽轨道向前行进,推动三角齿轮A5-9、带轴连杆B5-10沿着支撑总成A1-6的轨道向前前进,轴B1-9、轴C1-10通过轴固定块A1-11推动铲刀1-12向前运动,与第二去根总成2的铲刀形成夹击,去除绿豆丛多余的根部,后由上文所述的第一搅拌驱动总成5、第二搅拌驱动总成6通过搅拌分离总成8搅拌分离绿豆丛,最终掉入至传送带7-5,传输至集料框7-6中。
- 一种绿豆收割机
- 一种农用绿豆收割机上的秧土分离装置