一种电动自行车灯结构
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及一种电动车车灯,特别是一种电动车车灯结构。
背景技术
由于电动车价格低,使用方便,迅速得到推广,大道上骑电动自行车的人越来越多,电动车启动快,速度高,无声,骑车的人各式各样,虽平控制参差不齐,因此每天都带来安全事故。
为此,国家2019年4月15号《电动自行车安全技术规范》(新国标)正式实施,其中规定电动自行车的最高时速不能超过25km/h的行驶标准。
《电动自行车安全技术规范》总体来看,新国标对电动车最高车速、整车质量、电机功率等指标做了相关规定。限制了电动自行车的最高时速不能超过25km/h的行驶标准,整体电动车的最大质量不得超过55kg的硬性标准,蓄电池的电压不得超过48V的最大电压限制。输出功率不得超过400W的功率限制。新标准要求电动自行车必须具有脚踏骑行功能。
新国标将国内原有的电动两轮车细分为电动自行车、电动轻便摩托车和电动摩托车三类。根据新国标规定,时速20公里每小时以上50公里每小时以下的电驱两轮或三轮车称为轻便电动摩托车,时速在50公里每小时以上的称为电动摩托车。
发明内容
本发明的目的是提供一种能既能实现电动车行驶前方无人状态下,能有较快速度,电动车行驶前方有人状态下能迅速减速的一种电动车车灯结构。
本发明的目的是这样实现的,一种电动车车灯结构,其特征是:在车灯体(1)上有人体识别单元(3),人体识别单元(3)是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器(6)提供这一信号,当电动车控制器(6)获取热红外目标的目标信号时,电动车控制器(6)通过控制驱动控制器(7),由驱动控制器(7)驱动电机(8)减速,然后在由电机(8)驱动机械传动单元(9)驱使车轮(10)运动最终达到减速。
所述的热释电红外线传感器包括一个角度小于15度的菲尼尔透镜,热释电红外线传感器在菲尼尔透镜的焦点上,菲尼尔透镜用于避开道路外的人员产生的噪声信号。
所述的车灯体(1)内有充电电路单元(4),充电电路单元(4)与人体识别单元(3)电连接,向人体识别单元(3)提供需要的电压源,用于当车灯(2)启动后,通过车灯(2)的电源向充电电池提供充电电源,充电电路单元(4)固定在车灯体(1)后端。
在车灯体(1)上有人体识别单元(3)和超声波测距电路(12),人体识别单元(3)是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器(6)提供这一信号,超声波测距电路(12)用于获取目标的距离信号,当电动车控制器(6)获取热红外目标的目标信号时,同时依据超声波测距电路(12)检测的距离信号,电动车控制器(6)通过控制驱动控制器(7),由驱动控制器(7)驱动电机(8)减速,然后在由电机(8)驱动机械传动单元(9)驱使车轮(10)运动最终达到减速。
所述的充电电路单元(4)与人体识别单元(3)和超声波测距电路(12)电连接,向人体识别单元(3)和超声波测距电路(12)提供需要的电压源,用于当车灯(2)启动后,通过车灯(2)的电源向充电电池提供充电电源,充电电路单元(4)固定在车灯体1后端。
车灯体(1)上有人体识别单元(3)和激光测距电路(11),人体识别单元(3)是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器(6)提供这一信号,激光测距电路(11)用于获取目标的距离信号,当电动车控制器(6)获取热红外目标的目标信号时,同时依据激光测距电路(11)检测的距离信号,电动车控制器(6)通过控制驱动控制器(7),由驱动控制器(7)驱动电机(8)减速,然后再由电机(8)驱动机械传动单元9驱使车轮10运动最终达到减速。
本发明的优点是:由于在车灯体1上有人体识别单元3,人体识别单元3是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器6提供这一信号,当电动车控制器6获取热红外目标的目标信号时,电动车控制器6通过控制驱动控制器7,由驱动控制器7驱动电机8减速,然后在由电机8驱动机械传动单元9驱使车轮10运动最终达到减速。克服了现有热释电红外线传感器人体不移动,不会有信号输出的难题。本发明同时配合有测距和小角度尼尔透镜,避开道路外的人员产生的噪声信号。
附图说明
下面结合实施例及附图对本发明作进一步说明:
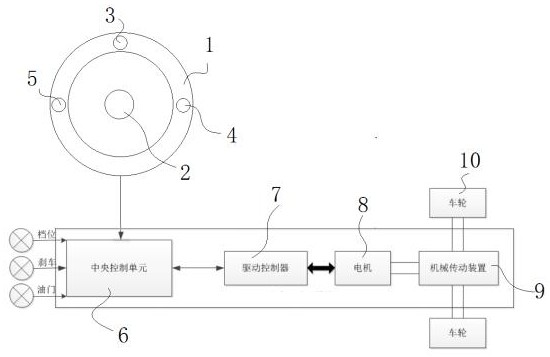
图1是本发明实施例1结构示意图;
图2是本发明实施例2结构示意图;
图3是本发明实施例3结构示意图。
图中,1、车灯体;2、车灯;3、人体识别单元;4、充电电路单元;5、充电电池;6、电动车控制器;7、驱动控制器;8、电机;9、机械传动单元;10、车轮;11、激光测距电路;12、超声波测距电路。
具体实施方式
实施例1
如图1所示,本发明至少包括:车灯体1,其特征是:在车灯体1上有人体识别单元3,人体识别单元3是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器6提供这一信号,当电动车控制器6获取热红外目标的目标信号时,电动车控制器6通过控制驱动控制器7,由驱动控制器7驱动电机8减速,然后在由电机8驱动机械传动单元9驱使车轮10运动最终达到减速。
热释电红外线传感器由探测元、滤光窗和场效应管阻抗变换器等三大部分组成,热释电红外线传感器将锆钛酸铅或LiTaO3这些材料做成很薄的薄片,每一片薄片相对的两面各引出一根电极,在电极两端则形成一个等效的小电容。因为这两个小电容是做在同一硅晶片上的,因此形成的等效小电容能自身产生极化,在电容的两端产生极性相反的正、负电荷。传感器中两个电容是极性相反串联的。
当传感器没有检测到人体辐射出的红外线信号时,在电容两端产生极性相反、电量相等的正、负电荷,所以,正负电荷相互抵消,回路中无电流,传感器无输出。
当人体静止在传感器的检测区域内时,照射到两个电容上的红外线光能能量相等,双探测元热释电红外传感器能量相等的光电流在回路中相互抵消,传感器没有信号输出。当人体在传感器的检测区域内移动时,照射到两个电容上的红外线能量不相等,光电流在回路中不能相互抵消,传感器有信号输出,也就是说传感器只对移动或运动的人体和体温近似人体的物体起作用,本发明采用相对运动方式,实现车前有人,通过车的移动实现人体无论是静止或运动都能检测人体的目的。
所述的热释电红外线传感器包括一个角度小于15度的菲尼尔透镜,热释电红外线传感器在菲尼尔透镜的焦点上,用于避开道路外的人员产生的噪声信号。
所述的车灯体1内有充电电路单元4,充电电路单元4与人体识别单元3电连接,向人体识别单元3提供需要的电压源,用于当车灯2启动后,通过车灯2的电源向充电电池5提供充电电源,充电电路单元4固定在车灯体1后端。
实施例2
如图2所示,本发明至少包括:车灯体1,其特征是:在车灯体1上有人体识别单元3和超声波测距电路12,人体识别单元3是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器6提供这一信号,超声波测距电路12用于获取目标的距离信号,当电动车控制器6获取热红外目标的目标信号时,同时依据超声波测距电路12检测的距离信号,电动车控制器6通过控制驱动控制器7,由驱动控制器7驱动电机8减速,然后在由电机8驱动机械传动单元9驱使车轮10运动最终达到减速。
热释电红外线传感器由探测元、滤光窗和场效应管阻抗变换器等三大部分组成,热释电红外线传感器将锆钛酸铅或LiTaO3这些材料做成很薄的薄片,每一片薄片相对的两面各引出一根电极,在电极两端则形成一个等效的小电容。因为这两个小电容是做在同一硅晶片上的,因此形成的等效小电容能自身产生极化,在电容的两端产生极性相反的正、负电荷。传感器中两个电容是极性相反串联的。
当传感器没有检测到人体辐射出的红外线信号时,在电容两端产生极性相反、电量相等的正、负电荷,所以,正负电荷相互抵消,回路中无电流,传感器无输出。
当人体静止在传感器的检测区域内时,照射到两个电容上的红外线光能能量相等,双探测元热释电红外传感器能量相等的光电流在回路中相互抵消,传感器没有信号输出。当人体在传感器的检测区域内移动时,照射到两个电容上的红外线能量不相等,光电流在回路中不能相互抵消,传感器有信号输出,也就是说传感器只对移动或运动的人体和体温近似人体的物体起作用,本发明采用相对运动方式,实现车前有人,通过车的移动实现人体无论是静止或运动都能检测人体的目的。
所述的热释电红外线传感器包括一个角度小于15度的菲尼尔透镜,热释电红外线传感器在菲尼尔透镜的焦点上,用于避开道路外的人员产生的噪声信号。
所述的车灯体1内有充电电路单元4,充电电路单元4与人体识别单元3和超声波测距电路12电连接,向人体识别单元3和超声波测距电路12提供需要的电压源,用于当车灯2启动后,通过车灯2的电源向充电电池5提供充电电源,充电电路单元4固定在车灯体1后端。
实施例3
如图3所示,本发明至少包括:车灯体1,其特征是:在车灯体1上有人体识别单元3和激光测距电路11,人体识别单元3是热释电红外线传感器,热释电红外线传感器在移动过程中获取有热红外目标的目标信号,向电动车控制器6提供这一信号,激光测距电路11用于获取目标的距离信号,当电动车控制器6获取热红外目标的目标信号时,同时依据激光测距电路11检测的距离信号,电动车控制器6通过控制驱动控制器7,由驱动控制器7驱动电机8减速,然后在由电机8驱动机械传动单元9驱使车轮10运动最终达到减速。
热释电红外线传感器由探测元、滤光窗和场效应管阻抗变换器等三大部分组成,热释电红外线传感器将锆钛酸铅或LiTaO3这些材料做成很薄的薄片,每一片薄片相对的两面各引出一根电极,在电极两端则形成一个等效的小电容。因为这两个小电容是做在同一硅晶片上的,因此形成的等效小电容能自身产生极化,在电容的两端产生极性相反的正、负电荷。传感器中两个电容是极性相反串联的。
当传感器没有检测到人体辐射出的红外线信号时,在电容两端产生极性相反、电量相等的正、负电荷,所以,正负电荷相互抵消,回路中无电流,传感器无输出。
当人体静止在传感器的检测区域内时,照射到两个电容上的红外线光能能量相等,双探测元热释电红外传感器能量相等的光电流在回路中相互抵消,传感器没有信号输出。当人体在传感器的检测区域内移动时,照射到两个电容上的红外线能量不相等,光电流在回路中不能相互抵消,传感器有信号输出,也就是说传感器只对移动或运动的人体和体温近似人体的物体起作用,本发明采用相对运动方式,实现车前有人,通过车的移动实现人体无论是静止或运动都能检测人体的目的。
所述的热释电红外线传感器包括一个角度小于15度的菲尼尔透镜,热释电红外线传感器在菲尼尔透镜的焦点上,用于避开道路外的人员产生的噪声信号。
所述的车灯体1内有充电电路单元4,充电电路单元4与人体识别单元3和激光测距电路11电连接,向人体识别单元3和激光测距电路11提供需要的电压源,用于当车灯2启动后,通过车灯2的电源向充电电池5提供充电电源,充电电路单元4固定在车灯体1后端。
- 一种电动自行车转向灯的固定结构
- 一种电动自行车折叠轮结构及折叠电动自行车