工业管道群管端定位机器人及其清洗工业管道群的方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明属于工业管道清洗领域,具体涉及一种细小工业管道群管端定位机器人及其清洗工业管道群的方法。
背景技术
细小工业管道群是一类由众多管径小且按某一规律密集分布组成的管道系统,广泛应用在电站设备的冷凝器、换热器、核电工业中的蒸汽发生器等场所。在实际使用过程中,由于介质长时间在内流动,会导致管道系统内管壁结垢,致使管道内部通道截面变小甚至堵塞,这将大大减少管道的有效工作面积,影响管道输送效率,增加运输成本;另外,污垢的沉积可能会引发垢下腐蚀,导致管道出现锈蚀、裂纹等现象,引起管道系统的瘫痪,造成重大的经济损失。
目前针对细小管道群的清洗方法分为离线和在线两种。离线清洗需在停机后人工进行,费时费力,严重影响了设备的正常运转周期;在线清洗方法多采用胶球清洗或化学清洗,胶球清洗是利用水的流动和胶球与壁面间的压力进行不停车式清洗,主要针对结垢程度不大的情况,但存在胶球回收率低、易堵塞管道等缺点,至今不能达到理想效果;化学清洗是一种利用化学清洗液与污垢发生化学反应,从而使污垢溶解、脱落、剥离的方法,是我国应用最为广泛的清洗方法,清洗效果较好,但存在系统复杂、运行成本高、易腐蚀设备和污染环境等缺点。
目前在细小工业管道群领域,管道机器人的研究工作主要集中在单根管道内的清洗或检测机器人上,管端定位机器人鲜有研究。管端定位机器人是一种工作在管道系统的端部,能够根据控制程序运动并精确定位的机器人,在细小工业管道群的清洗方面,管端定位机器人主要用于对管内清洗机器人或清洗头进行精确的定位与移动工作,将管内机器人准确的送至清洗管道的入口处,最终在驱动力的带动下,使管内机器人穿过管束内完成清洗作业,因缺乏高精度的管端定位机器人进行精确定位,带动管内机器人在管间进行切换,致使管内机器人在细小工业管道群中的应用受到了限制,只局限于单根管道的清洗或检测;另外,管端定位机器人在管盘的清洗和检修领域也具有重要的应用意义,它可通过携带一种或多种传感器及操作器,完成对设备运行时的缺陷检测、裂缝焊接等任务。所以,细小工业管道群管端定位机器人系统的研究具有重要的应用价值。
发明内容
本发明的目的是针对现有技术的不足,提供一种细小工业管道群管端定位机器人及其清洗工业管道群的方法。
为了达到上述目的,本发明采用了以下技术方案:
本发明工业管道群管端定位机器人,包括定位机构、清管器收送机构和拉线传感器。所述的定位机构包括顺序相连的第一转动关节、第一关节臂、第二转动关节和第二关节臂;第一转动关节的关节壳体固定在外部机架上;第一转动关节的转动部输出端与第一关节臂一端固定,第一关节臂另一端与第二转动关节的关节壳体固定;第二转动关节的转动部输出端与第二关节臂一端固定。所述的清管器收送机构包括末端外壳、卷线轮、钢丝软绳、三通管、导套连接件、导套、配线器、拉线连接头、直线电机、卷线电机和清管器。所述的末端外壳与第二关节臂另一端固定;卷线电机的底座固定在末端外壳上;钢丝软绳两端分别与清管器顶部和卷线轮固定,并缠绕在卷线轮上;所述的卷线轮与卷线电机的输出轴固定;所述三通管的下端套在清管器外,并固定在末端外壳上;钢丝软绳穿过三通管上端开设的过孔;液压管路依次穿过第一转动关节、第一关节臂、第二转动关节和第二关节臂,并与三通管侧部的通液口连通;所述的导套与三通管下端外壁构成滑动副,并与套在三通管外的导套连接件固定;导套连接件与直线电机的输出轴固定,直线电机的底座固定在末端外壳上;末端外壳底部设有一体成型的圆筒形通道,导套伸入圆筒形通道内;配线器与圆筒形通道外壁构成转动副;所述的配线器由两两构成转动副的外弧形块、中弧形块和内弧形块组成;外弧形块、中弧形块和内弧形块外均固定有一个拉线连接头;直线电机和卷线电机均由控制器控制。拉线传感器共有三个,沿圆周均布固定在管道群外围;拉线传感器的信号输出端与控制器连接;每个拉线传感器与配线器的一个拉线连接头通过一根拉线连接。
优选地,所述第一转动关节和第二转动关节的结构完全相同,均包括编码器、关节电机、传动轴、电机轴齿轮、平键一、关节传动齿轮、关节中空穿线轴、液压管路、谐波减速器、角接触球轴承一、键二、制动器齿轮、键三、角接触球轴承二和制动器。所述的关节电机上设有编码器,编码器的信号输出端连接控制器;关节电机的输出轴与传动轴固定;关节电机的底座固定在关节壳体上;所述的电机轴齿轮与传动轴通过键一连接;所述的关节传动齿轮与关节中空穿线轴通过键二连接,且同时与电机轴齿轮和制动器齿轮啮合;所述关节中空穿线轴的顶端通过角接触球轴承二支承在关节壳体上,底端通过角接触球轴承一支承在端盖上并与谐波减速器的输入端连接;所述的端盖固定在关节壳体端部;制动器齿轮与制动器的输出轴通过键三连接;制动器的底座与关节壳体固定;关节电机和制动器均由控制器控制。所述的第一转动关节中谐波减速器的输出端与第一关节臂固定,第二转动关节中谐波减速器的输出端与第二关节臂固定;所述的液压管路依次穿过第一转动关节的关节中空穿线轴、第一关节臂、第二转动关节的关节中空穿线轴和第二关节臂。
优选地,所述第一关节臂和第二关节臂的材料均为表面涂有防腐材料的铝合金。
优选地,所述卷线轮、三通管、导套连接件、导套和配线器的材料均为不锈钢,具有高耐腐蚀性。
该工业管道群管端定位机器人清洗工业管道群的方法,具体如下:
在控制器中预先输入各待清洗管道和各拉线传感器的位置信息;控制器根据各拉线传感器的拉力信号来判断清管器收送机构中导套的当前位置,并计算到达待清洗管道位置时第一转动关节和第二转动关节所需的关节角增量,然后控制定位机构中第一转动关节和第二转动关节的制动器断电解锁,并控制第一转动关节和第二转动关节联合转动,使得清管器收送机构到达待清洗管道正上方,对待清洗管道进行清洗作业。清洗完全部管道后,定位机构复位。
清洗作业过程具体如下:使卷线电机转动释放钢丝软绳,同时直线电机推动导套连接件和导套靠近待清洗管道,直至导套扣压在待清洗管道的管口形成密封,在此过程中保证卷线电机转动释放钢丝软绳的速度大于直线电机推动导套向前运动的速度,从而确保钢丝软绳对清管器没有拉力;然后,通过液压管路将带压流体通入三通管中,从而驱动清管器向前运动,使清管器从三通管下端进入待清洗管道进行清洗;清洗完毕后,卷线电机拉动钢丝软绳回收清管器,使清管器进入三通管内,且直线电机的输出轴缩回,拉动导套上升。
优选地,清管器收送机构运动到待清洗管道正上方的过程具体如下:在控制器的控制下,第一转动关节和第二转动关节的关节电机转动,带动电机轴齿轮和关节传动齿轮转动,关节传动齿轮再将动力传给谐波减速器,第一转动关节的谐波减速器带动第一关节臂转动,第二转动关节的谐波减速器带动第二关节臂转动;当第一转动关节的编码器测得第一转动关节的关节电机转动了控制器计算出的第一转动关节所需关节角增量,且第二转动关节的编码器测得第二转动关节的关节电机转动了控制器计算出的第二转动关节所需关节角增量,则控制器判断清管器收送机构的导套运动到与待清洗管道同轴,并控制第一转动关节和第二转动关节的制动器通电,控制第一转动关节和第二转动关节的关节电机断电。
本发明具有的有益效果:
1、本发明的控制器通过三个拉线传感器的信号判断清管器收送机构的当前位置,并计算到达待清洗管道位置时第一转动关节和第二转动关节所需的关节角增量,然后控制第一转动关节和第二转动关节联合转动实现清管器收送机构的准确定位;且本发明通过清管器收送机构实现细小工业管道群的清洗;本发明结构巧妙、简单、安装方便,灵活性高,可代替人工进行在线清洗,不需要设备停机,提高生产效率。
2、本发明利用电机和绳索控制清管器的释放、回收,清管器回收率高,不易堵塞管道。
3、本发明液压管路中通入的带压流体可以采用与管道中一样的介质,不会引入其他杂质,节能环保,对设备腐蚀性小。
4、本发明还可通过携带其它类型的传感器及操作器,完成对设备运行时的缺陷检测、裂缝焊接等任务。
附图说明
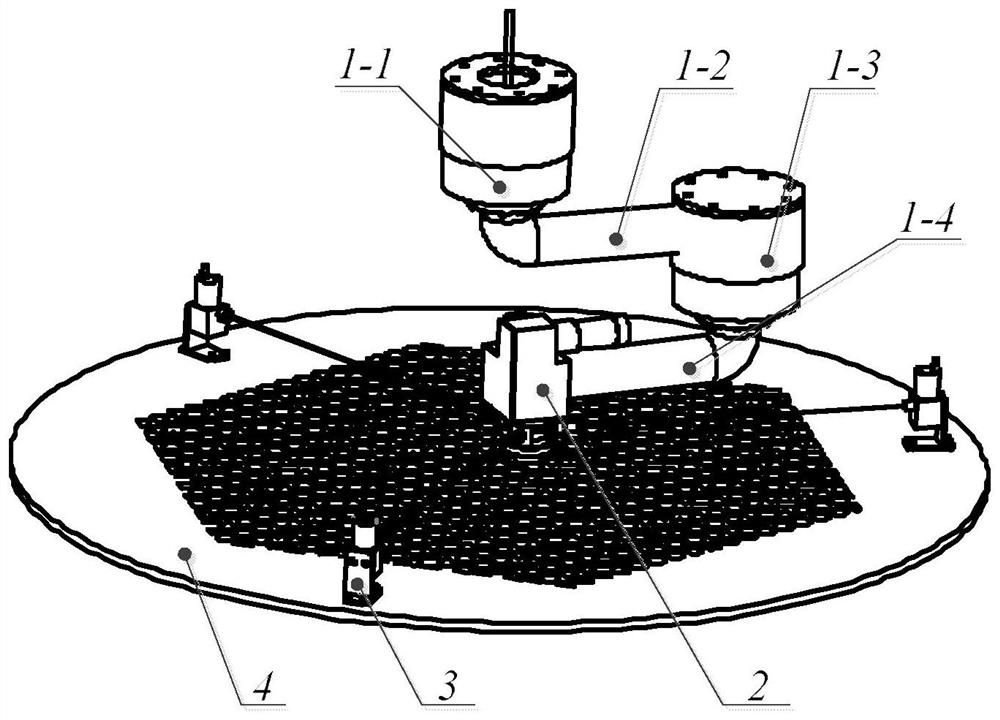
图1为本发明的整体结构立体图;
图2为本发明中第一转动关节或第二转动关节的结构剖视图;
图3为本发明中清管器收送机构的一个结构剖视图;
图4为本发明中清管器收送机构的另一个结构剖视图。
具体实施方式
下面结合附图及实施例对本发明做进一步说明。
参考附图1,工业管道群管端定位机器人,包括定位机构、清管器收送机构2和拉线传感器3。
参考附图1和附图2,定位机构包括顺序相连的第一转动关节1-1、第一关节臂1-2、第二转动关节1-3和第二关节臂1-4。第一转动关节1-1和第二转动关节1-3的结构完全相同,均包括编码器1-1-1、关节电机1-1-2、传动轴1-1-3、电机轴齿轮1-1-4、平键一1-1-5、关节传动齿轮1-1-6、关节中空穿线轴1-1-7、液压管路1-1-8、谐波减速器1-1-9、角接触球轴承一1-1-10、键二1-1-11、制动器齿轮1-1-12、键三1-1-13、角接触球轴承二1-1-14和制动器1-1-15。关节电机1-1-2上设有检测角位移的编码器1-1-1,编码器1-1-1的信号输出端连接控制器;关节电机1-1-2的输出轴与传动轴1-1-3固定;关节电机1-1-2的底座固定在关节壳体上;电机轴齿轮1-1-4与传动轴1-1-3通过键一1-1-5连接;关节传动齿轮1-1-6与关节中空穿线轴1-1-7通过键二1-1-11连接,且同时与电机轴齿轮1-1-4和制动器齿轮1-1-12啮合;关节中空穿线轴1-1-7顶端通过角接触球轴承二1-1-14支承在关节壳体上,底端通过角接触球轴承一1-1-10支承在端盖上并与谐波减速器1-1-9的输入端连接;端盖固定在关节壳体端部;制动器齿轮1-1-12与制动器的输出轴通过键三1-1-13连接;制动器1-1-15的底座通过螺栓与关节壳体固定连接;关节电机1-1-2和制动器1-1-15均由控制器控制。第一转动关节1-1的关节壳体固定在外部机架上;第一转动关节1-1中谐波减速器1-1-9的输出端与第一关节臂1-2一端固定连接;第一关节臂1-2另一端与第二转动关节1-3的关节壳体固定连接;第二转动关节1-3中谐波减速器1-1-9的输出端与第二关节臂1-4一端固定连接;制动器1-1-15断电时制动器的输出轴可以自由转动,进而制动器齿轮1-1-12可以自由转动,定位机构处于管孔寻位状态;在定位机构找到正确的管孔位置后,控制器对制动器1-1-15进行通电,制动器的输出轴被锁定,进而制动器齿轮1-1-12被锁定,与其啮合的关节传动齿轮1-1-6被锁定,定位机构的空间位置不再发生变化,清管器收送机构进入清管器收送作业。
参考附图3和附图4,清管器收送机构包括末端外壳2-1、卷线轮2-2、钢丝软绳2-3、三通管2-4、导套连接件2-5、导套2-6、配线器2-7、拉线连接头2-8、直线电机2-9、卷线电机2-10和清管器2-11。末端外壳2-1与第二关节臂1-4另一端固定;卷线电机2-10的底座固定在末端外壳2-1上;钢丝软绳2-3两端分别与清管器2-11顶部和卷线轮2-2固定,并缠绕在卷线轮2-2上;钢丝软绳2-3可通过卷线轮2-2进行收线与放线;卷线轮2-2与卷线电机2-10的输出轴固定;三通管2-4下端套在清管器2-11外,并固定在末端外壳2-1上;钢丝软绳2-3穿过三通管2-4上端开设的过孔;液压管路1-1-8依次穿过第一转动关节1-1的关节中空穿线轴1-1-7、第一关节臂1-2、第二转动关节1-3的关节中空穿线轴1-1-7和第二关节臂1-4,并与三通管2-4侧部的通液口连通;清管器2-11未工作时,收纳在三通管2-4内;导套2-6与三通管2-4下端外壁构成滑动副,并与套在三通管2-4外的导套连接件2-5通过螺栓固定连接;导套连接件2-5与直线电机2-9的输出轴固定,直线电机2-9的底座固定在末端外壳2-1上;在直线电机2-9驱动下,导套连接件2-5以及导套2-6可与三通管2-4下端产生相对直线滑移;末端外壳2-1底部设有一体成型的圆筒形通道,导套2-6伸入圆筒形通道内;配线器2-7与圆筒形通道外壁构成转动副;配线器2-7由两两构成转动副的外弧形块、中弧形块和内弧形块组成;外弧形块、中弧形块和内弧形块外均固定有一个拉线连接头2-8;直线电机2-9和卷线电机2-10均由控制器控制。
拉线传感器3共有三个,沿圆周均布固定在管道群4外围;拉线传感器3的信号输出端与控制器连接;每个拉线传感器3与配线器的一个拉线连接头2-8通过一根拉线连接;当定位机构运动时,各拉线传感器3将拉力信号输出至控制器,控制器根据各拉线传感器3的拉力信号来判断导套2-6的位置,实现导套2-6的精准定位。
该工业管道群管端定位机器人清洗工业管道群的方法,具体如下:
在控制器中预先输入各待清洗管道和各拉线传感器3的位置信息;控制器根据各拉线传感器3的拉力信号来判断清管器收送机构中导套2-6的当前位置,并计算到达待清洗管道位置时第一转动关节1-1和第二转动关节1-3所需的关节角增量,然后控制定位机构中第一转动关节1-1和第二转动关节1-2的制动器断电解锁,并控制第一转动关节1-1和第二转动关节1-3联合转动,使得清管器收送机构到达待清洗管道正上方,对待清洗管道进行清洗作业。清洗完全部管道后,定位机构复位,等待下一次作业。
清管器收送机构运动到待清洗管道正上方的过程具体如下:在控制器的控制下,第一转动关节1-1和第二转动关节1-2的关节电机1-1-2转动,带动电机轴齿轮1-1-4和关节传动齿轮1-1-6转动,关节传动齿轮1-1-6再将动力传给谐波减速器1-1-9,第一转动关节1-1的谐波减速器1-1-9带动第一关节臂1-2转动,第二转动关节1-3的谐波减速器1-1-9带动第二关节臂1-4转动;当第一转动关节1-1的编码器1-1-1测得第一转动关节1-1的关节电机1-1-2转动了控制器计算出的第一转动关节1-1所需关节角增量,且第二转动关节1-2的编码器1-1-1测得第二转动关节1-2的关节电机1-1-2转动了控制器计算出的第二转动关节1-2所需关节角增量,则控制器判断清管器收送机构的导套2-6运动到与待清洗管道同轴,并控制第一转动关节1-1和第二转动关节1-2的制动器1-1-16通电,控制第一转动关节1-1和第二转动关节1-2的关节电机1-1-2断电,定位机构位置被锁定。
清洗作业具体如下:使卷线电机2-10转动释放钢丝软绳2-3,同时直线电机2-9推动导套连接件2-5和导套2-6靠近待清洗管道,直至导套2-6扣压在待清洗管道的管口形成密封,在此过程中保证卷线电机2-10转动释放钢丝软绳2-3的速度大于直线电机2-9推动导套2-6向前运动的速度,从而确保钢丝软绳2-3对清管器2-11没有拉力作用;然后,通过液压管路1-1-8将带压流体通入三通管中,从而驱动清管器2-11向前运动,使清管器2-11从三通管2-4下端进入待清洗管道进行清洗;清洗完毕后,卷线电机2-10拉动钢丝软绳2-3回收清管器2-11,使清管器2-11进入三通管内,且直线电机2-9的输出轴缩回,拉动导套2-6上升。
- 工业管道群管端定位机器人清洗工业管道群的方法
- 工业管道群管端定位机器人及其清洗工业管道群的方法