一种美工刀安装设备
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及一种组件安装设备,尤其涉及一种美工刀安装设备。
背景技术
美工刀是一种美术和做手工艺品用的刀,主要用来切割质地较软的东西,多为塑料刀柄、刀鞘和刀片三部分组成,为抽拉式结构,有大小多种型号。
在制作美工刀时,首先要将刀鞘嵌入到刀柄中,一般的美工刀安装方式,是由人们将刀鞘插入刀柄中,将刀柄固定,再用撞击部件将刀鞘装入刀柄中,从而完成美工刀的安装。但是由于人工安装时操作步骤繁琐,需要人们手动将刀柄固定在撞击部件右侧,其安全隐患高,人们还需要将组装好的美工刀取下,加大人们的工作量,降低美工刀安装效率。
基于上述美工刀安装过程中所存在的问题,因此需要研发一种能够自动传送美工刀、固定美工刀、自动将美工刀组件安装并且自动挤出已安装完成的美工刀安装设备,来克服以上美工刀安装无法固定美工刀、传送美工刀以及无法将美工刀挤出的缺点。
发明内容
为了克服一般美工刀安装方式存在的无法固定美工刀、传送美工刀以及无法将美工刀挤出的缺点,要解决的技术问题为:提供一种能够自动传送美工刀、固定美工刀、自动将美工刀组件安装并且自动挤出已安装完成的美工刀安装设备。
技术方案:一种美工刀安装设备,包括有:安装架,所述安装架用于支撑整个设备;伺服电机,所述伺服电机设置在所述安装架左部下侧;转动机构,所述转动机构设置在所述安装架内壁两侧之间,该所述转动机构与所述伺服电机的输出轴连接;推动机构,所述推动机构设置在所述安装架顶部靠近所述伺服电机的一侧,该所述推动机构与所述转动机构相连;海绵垫,所述海绵垫设置在所述安装架前部。
进一步的,转动机构包括有:第一轴承座,所述第一轴承座设置在所述安装架靠近所述伺服电机处;第一转轴,所述第一转轴转动式设置在所述第一轴承座中,所述第一转轴与所述伺服电机相连;缺齿轮,所述缺齿轮设置在所述第一转轴上;第二转轴,所述第二转轴转动式设置在所述安装架前后两侧中间;第一全齿轮,所述第一全齿轮设置在前侧所述第二转轴左端;第一皮带传输组件,所述第一皮带传输组件均连接在所述第二转轴的两侧;连接杆,所述连接杆均匀设置在所述第一皮带传输组件顶部; 放置板,所述滑槽均对称开在所述安装架内壁两侧,所述放置板均滑动式连接在所述滑槽之间。
进一步的,推动机构包括有:第二轴承座,所述第二轴承座设置在所述安装架的左部中间靠近所述伺服电机的一侧;第三转轴,所述第三转轴转动式设置在所述第二轴承座上;第二全齿轮,所述第二全齿轮设置在所述第三转轴中间,该所述第二全齿轮与所述缺齿轮相啮合;第三轴承座,所述第三轴承座设置在所述安装架的左部上侧;第四转轴,所述第四转轴转动式设置在所述第三轴承座中部;第二皮带传输机构,所述第二皮带传输机构设置在所述第四转轴和所述第三转轴之间;支撑筒,所述支撑筒设置在所述第四转轴左端;滑套,所述滑套设置在所述安装架靠近所述伺服电机一侧的顶部;推动杆,所述推动杆滑动式设置在所述滑套中部,该所述推动杆与所述支撑筒滑动式相连接;推块,所述推块设置在所述推动杆的右端底部,该所述推块与所述放置板相接触配合。
进一步的,还包括有:包容块,所述包容块设置在所述放置板右部中间;滑块,所述滑块滑动式设置在所述包容块的前部;第一弹簧,所述第一弹簧连接在所述滑块底部和所述放置板顶部右侧之间;固定杆,所述固定杆设置在所述安装架顶部正对所述滑套的一侧;压板,所述压板设置在所述固定杆左端底部。
进一步的,还包括有:固定架,所述固定架设置在所述安装架左侧内壁;推动块,所述凹槽开在所述放置板的中部,所述推动块卡接在所述凹槽内;推动架,所述推动架连接在所述推动块底部;第二弹簧,所述第二弹簧均套在所述推动架上。
本发明的有益效果:1、本发明达到了自动推动美工刀向前移动、自动安装美工刀的效果。
2、在美工刀被安装时,滑块将美工刀紧紧按压在放置板上,实现了对美工刀进行二次固定。
3、美工刀被完成后,放置板继续向前移动时,固定架向上挤压推动架,推动美工刀向上移动,实现美工刀的自动挤出。
附图说明
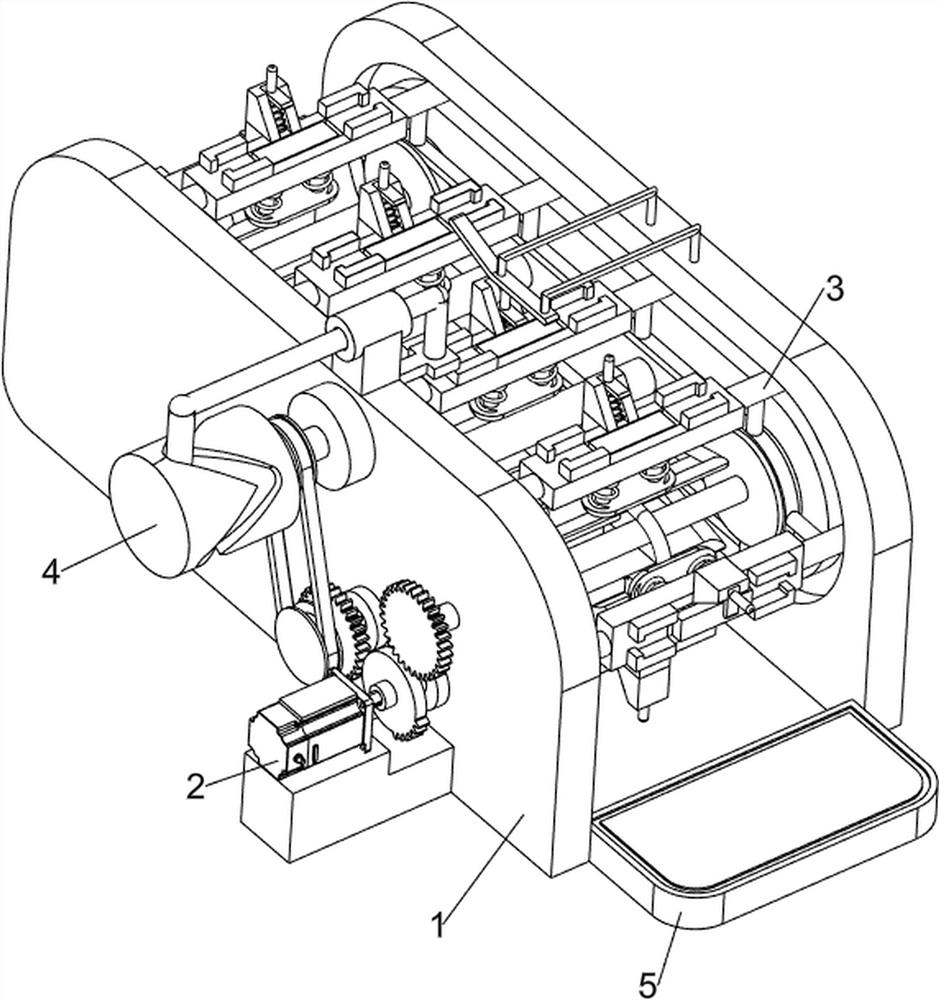
图1为本发明的立体结构示意图。
图2为本发明转动机构的第一种部分立体结构示意图。
图3为本发明转动机构的第二种部分立体结构示意图。
图4为本发明推动机构的第一种部分立体结构示意图。
图5为本发明推动机构的第二种部分立体结构示意图。
图6为本发明A的立体结构示意图。
图7为本发明的第一种部分立体结构示意图。
图8为本发明的第二种部分立体结构示意图。
附图标记中:1-安装架,2-伺服电机,3-转动机构,30-第一轴承座,31-第一转轴,32-缺齿轮,33-第二转轴,34-第一全齿轮,35-第一皮带传输组件,36-连接杆,37-滑槽,38-放置板,4-推动机构,40-第二轴承座,41-第三转轴,42-第二皮带传输机构,43-第三轴承座,44-第四转轴,45-支撑筒,46-滑套,47-推动杆,48-推块,49-第二全齿轮,5-海绵垫,6-包容块,7-滑块,8-第一弹簧,9-固定杆,10-压板,11-固定架,12-凹槽,13-推动块,14-推动架,15-第二弹簧。
具体实施方式
下面结合附图和具体实施方式对本发明进一步说明。
实施例1
一种美工刀安装设备,如图1-5所示,包括有安装架1、伺服电机2、转动机构3、推动机构4和海绵垫5,安装架1左部下侧安装有伺服电机2,安装架1内壁左右两侧之间连接有转动机构3,安装架1的左部上侧中间设有推动机构4,安装架1的前部设有海绵垫5。
转动机构3包括有第一轴承座30、第一转轴31、缺齿轮32、第二转轴33、第一全齿轮34、第一皮带传输组件35、连接杆36和放置板38,安装架1的左部前侧中部设有第一轴承座30,第一轴承座30左部转动式连接有第一转轴31,第一转轴31卡接在伺服电机2的输出轴上,第一转轴31上设有缺齿轮32,安装架1的上侧前后两侧均转动式连接有第二转轴33,前侧第二转轴33的左端设有第一全齿轮34,第一全齿轮34与第一转轴31啮合,第二转轴33的左侧之间和右侧之间均连接有第一皮带传输组件35,安装架1的内壁两侧对称开有滑槽37,滑槽37之间均匀连接有放置板38,放置板38左右两侧底部均设有连接杆36,连接杆36与第一皮带传输组件35相连接。
推动机构4包括有第二轴承座40、第三转轴41、第二皮带传输机构42、第三轴承座43、第四转轴44、支撑筒45、滑套46、推动杆47和推块48,安装架1的左部下侧中间设有第二轴承座40,第二轴承座40上转动式连接有第三转轴41,第三转轴41左侧设有第二全齿轮49,第二全齿轮49与缺齿轮32啮合,安装架1的左部上侧中间设有第三轴承座43,第三轴承座43上转动式连接有第四转轴44,第四转轴44和第三转轴41左端之间连接有第二皮带传输机构42,第四转轴44左端设有支撑筒45,安装架1左侧顶部中间设有滑套46,滑套46顶部滑动式连接有推动杆47,推动杆47左端与支撑筒45滑动式连接,推动杆47的右部下侧设有推块48,推块48与放置板38相接触配合。
当人们需要安装美工刀时,人们不断将美工刀固定在转动机构3的放置位置上,开启伺服电机2,伺服电机2的输出轴转动带动转动机构3运转,转动机构3运转带动美工刀向前移动,随后伺服电机2运作带动推动机构4运转,推动机构4运转对美工刀进行安装,当伺服电机2的输出轴继续带动转动机构3运转时,美工刀已经完成组装,转动机构3运转带动美工刀继续前行,美工刀运行至前侧时,再手动将组装好的美工刀取出,使美工刀掉落在海绵垫5上,以此往复,便可不停地组装美工刀。
将美工刀固定在放置板38中部,开启伺服电机2转动,伺服电机2的输出轴转动带动第一转轴31转动,第一转轴31转动带动缺齿轮32转动,当缺齿轮32转动到有齿部分与第一全齿轮34啮合时,通过第一全齿轮34带动第二转轴33转动,第二转轴33转动带动第一皮带传输组件35转动,第一皮带传输组件35转动通过连接杆36和滑槽37使放置板38向前移动,使得放置板38带动美工刀向前移动,当缺齿轮32转动到有齿部分与第一全齿轮34分离时,美工刀停止转动,以此往复,便可以带动美工刀间歇性向前移动。
开启伺服电机2转动,当缺齿轮32继续转动到有齿部分与第二全齿轮49啮合时,缺齿轮32转动通过第二全齿轮49带动第二皮带传输机构42转动,第二皮带传输机构42转动带动第四转轴44和支撑筒45转动,支撑筒45转动通过W形槽使得推动杆47不断左右移动,当推动杆47向右移动时,带动推块48向右移动,使得推块48底部推动美工刀组件,将美工刀安装完成,当缺齿轮32转动到有齿部分与第二全齿轮49分离时,推动机构4停止转动,人们手动取出美工刀即可。
实施例2
在实施例1的基础之上,如图6-8所示,还包括有包容块6、滑块7、第一弹簧8、固定杆9和压板10,安装架1的右侧顶部正对滑套46处设有固定杆9,固定杆9的左端底部设有压板10,放置板38的右部中间设有包容块6,包容块6的前部滑动式连接有滑块7,滑块7的底部和放置板38顶部右侧中间连接有第一弹簧8。
还包括有固定架11、推动块13、推动架14和第二弹簧15,安装架1的左侧内壁前侧设有固定架11,放置板38的中部开有凹槽12,支撑筒45内卡接有推动块13,推动块13底部左右两侧之间连接有推动架14,推动架14和推动块13底部之间均连接有第二弹簧15,第二弹簧15均套在推动架14上。
当转动机构3带动美工刀向前移动时,放置板38向前移动带动包容块6向前移动,包容块6向前移动带动滑块7和第一弹簧8向前移动,滑块7运动到与压板10的后端接触时,压板10向下挤压滑块7,第一弹簧8被压缩,滑块7被卡在美工刀顶部和压板10底部之间,美工刀被二次固定,当美工刀组装完成后,放置板38向前移动带动美工刀和包容块6向前移动,包容块6向前移动带动滑块7和第一弹簧8向前移动,滑块7与压板10分离,第一弹簧8复位带动滑块7向上运动复位。
美工刀组装完成后,伺服电机2继续转动带动转动机构3运作,使放置板38带动美工刀间歇性向前移动,放置板38向前移动带动推动块13向前移动,推动块13向前移动带动推动架14和第二弹簧15向前移动,当推动架14移动到与固定架11相接触时,固定架11将推动架14向上顶,推动架14向上运动带动推动块13和美工刀向上运动,第二弹簧15被压缩,当放置板38转动到前侧时,美工刀掉落在海绵垫5上,人们将组装好的美工刀收集起来即可。
以上对本申请进行了详细介绍,本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想;同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本申请的限制。
- 一种美工刀生产用刀架安装设备
- 一种美工刀内部刀片架安装设备