继电器
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及继电器。
背景技术
在继电器中,有具备用于对在触点产生的电弧进行消弧的构造的继电器。例如,在专利文献1中,在固定触点部的内侧配置有壁部。固定触点部包括固定触点接触部和固定着固定触点接触部的固定触点基座部。壁部的高度比固定触点基座部高,比固定触点接触部的高度低。
在专利文献1中,通过上述的壁部,电弧电流的爬电距离变大。由此,电弧电流难以短路。另外,通过使得壁部为上述那样的高度,能够防止产生阻碍可动触点部的动作的情况。
专利文献1:日本专利特开2007-214034公报
发明内容
在专利文献1中,为了避免与可动触点部的干涉,不能提高壁部。因此,难以通过壁部提高电弧的阻断性能。
本发明的课题在于,在继电器中,在避免阻碍可动接触片的动作的同时,提高电弧的阻断性能。
一个方式所涉及的继电器包括可动接触片、第1固定端子、第2固定端子、驱动装置以及壁部。可动接触片包括在可动接触片的长度方向上相互分离配置的第1可动触点和第2可动触点。第1固定端子包括与第1可动触点对置配置的第1固定触点。第2固定端子包括与第2可动触点对置配置的第2固定触点。驱动装置使可动接触片在第1可动触点以及第2可动触点相对于第1固定触点以及第2固定触点接触的方向以及离开的方向上移动。壁部在长度方向上配置于第1固定触点以及第2固定触点的内侧。壁部的至少一部分在可动接触片的移动方向上配置于越过第1固定触点以及第2固定触点到可动接触片侧的位置。可动接触片具有在第1可动触点及第2可动触点与第1固定触点及第2固定触点接触的状态下避开壁部的形状。
在本方式所涉及的继电器中,壁部的至少一部分在可动接触片的移动方向上配置于越过第1固定触点以及第2固定触点到可动接触片侧的位置。因此,在电弧被朝向第1固定触点以及第2固定触点的内侧拉伸的情况下,容易碰到壁部。由此,能够迅速地对电弧进行消弧。另外,可动接触片具有在第1可动触点及第2可动触点与第1固定触点及第2固定触点接触的状态下避开壁部的形状。因此,即使如上述那样配置壁部,也能够避免可动接触片与壁部的干涉。
壁部也可以由通过电弧的热而产生消弧气体的消弧材料形成。在该情况下,通过从壁部产生消弧气体,能够更迅速地对电弧进行消弧。
可动接触片也可以具有向远离壁部的方向凹陷的形状。在该情况下,通过可动接触片的凹陷的形状,能够避免与壁部的干涉。
可动接触片也可以包括向远离壁部的方向弯曲的弯曲部。在该情况下,通过可动接触片的弯曲部的形状,能够避免与壁部的干涉。另外,能够将电弧的起点限定于弯曲部。
弯曲部也可以与壁部对置配置。在该情况下,被从弯曲部拉伸的电弧容易碰到壁部。由此,能够更迅速地对电弧进行消弧。
可动接触片也可以包括与壁部对置配置的孔。在该情况下,在第1可动触点以及第2可动触点与第1固定触点以及第2固定触点接触的状态下,通过将壁部配置于孔内,能够避免与壁部的干涉。
可动接触片也可以包括与壁部对置配置的凹部。在该情况下,在第1可动触点以及第2可动触点与第1固定触点以及第2固定触点接触的状态下,通过将壁部配置于凹部内,能够避免与壁部的干涉。
可动接触片也可以包括第1触点支承部和第2触点支承部。第1触点支承部也可以支承第1可动触点。第2触点支承部也可以支承第2可动触点。也可以是,在可动接触片的长度方向上,第1触点支承部的内端部与第2触点支承部的内端部相互分离地配置。壁部也可以与第1触点支承部的内端部和第2触点支承部的内端部之间的空间相对地配置。在该情况下,在第1可动触点以及第2可动触点与第1固定触点以及第2固定触点接触的状态下,通过将壁部配置于第1触点支承部的内端部与第2触点支承部的内端部之间,能够避免与壁部的干涉。
在第1可动触点以及第2可动触点与第1固定触点以及第2固定触点接触的状态下,从可动接触片的长度方向观察,壁部与第1可动触点以及第1固定触点重叠也可以。在该情况下,电弧容易碰到壁部。由此,能够更迅速地对电弧进行消弧。
第1固定端子也可以包括触点支承部和中间部。触点支承部也可以支承第1固定触点,在长度方向上从第1固定触点向外侧延伸。中间部也可以从触点支承部向与可动接触片的移动方向平行的方向延伸。在该情况下,通过在中间部流动的电流,朝向第1固定触点以及第2固定触点的内侧的方向的洛伦兹力容易作用于电弧。但是,即使电弧被朝向第1固定触点以及第2固定触点的内侧拉伸,也能够通过壁部迅速地对电弧进行消弧。
发明效果
根据本发明,在继电器中,能够在避免阻碍可动接触片的动作的同时,提高电弧的阻断性能。
附图说明
图1是表示第1实施方式的继电器的侧面剖视图。
图2是表示第1实施方式的继电器的触点壳体内的结构的俯视图。
图3是表示第1实施方式的继电器的触点壳体内的结构的俯视图。
图4是触点装置及壁部的放大侧面剖视图。
图5是触点装置及壁部的放大侧面剖视图。
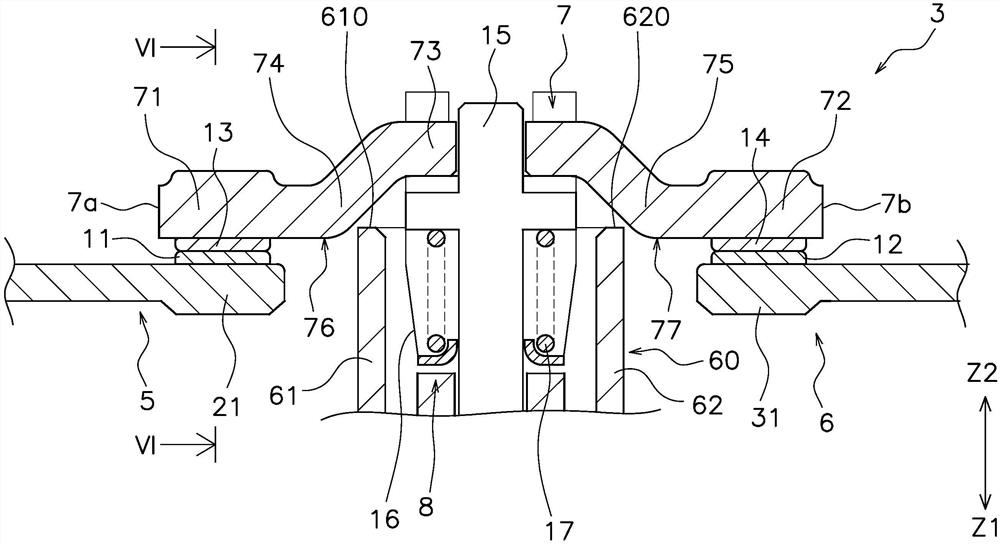
图6是图5中的VI-VI剖视图。
图7是表示第2实施方式的继电器的触点壳体内的结构的俯视图。
图8是表示第3实施方式的继电器的触点壳体内的结构的俯视图。
图9是表示第4实施方式的继电器的触点壳体内的结构的俯视图及侧视图。
图10是表示第5实施方式的继电器的触点壳体内的结构的俯视图及侧视图。
图11是表示第6实施方式的继电器的触点壳体内的结构的侧视图。
图12是表示第7实施方式的继电器的触点壳体内的结构的侧视图。
符号说明
4:驱动装置;
7:可动接触片;
8:接触片保持部;
11:第1固定触点;
12:第2固定触点;
13:第1可动触点;
14:第2可动触点;
60:壁部;
71:第1触点支承部;
73:第1中间部;
74:第1弯曲部;
81:第1孔。
具体实施方式
下面,参照附图对实施方式的继电器进行说明。图1是表示第1实施方式的继电器1a的侧面剖视图。如图1所示,继电器1a具备壳体2、触点装置3以及驱动装置4。另外,在以下的说明中,上下左右的各方向是指图1中的上下左右的各方向。另外,前后方向是指与图1的纸面垂直的方向。但是,这些方向的定义并不限定继电器1a的配置方向。
壳体2收纳有触点装置3和驱动装置4。壳体2由具有绝缘性的树脂形成。壳体2包括壳体主体2a和盖部2b。触点装置3和驱动装置4配置在壳体主体2a内。盖部2b与壳体主体2a分体。盖部2b安装于壳体主体2a。壳体主体2a包括触点壳体18和外壳19。触点壳体18将壳体2的内部划分为第1收纳部S1和第2收纳部S2。在第1收纳部S1内配置有触点装置3。在第2收纳部S2内配置有驱动装置4。外壳19在内部收容有触点壳体18。
触点装置3包括第1固定端子5、第2固定端子6、可动接触片7和接触片保持部8。第1固定端子5、第2固定端子6以及可动接触片7例如由铜等具有导电性的材料形成。第1固定端子5包括第1固定触点11。第2固定端子6包括第2固定触点12。第1固定触点11和第2固定触点12在左右方向上分离地配置。
可动接触片7沿左右方向延伸。在本实施方式中,可动接触片7的长度方向与左右方向一致。可动接触片7包括第1可动触点13和第2可动触点14。第1可动触点13和第2可动触点14在左右方向上分离地配置。第1可动触点13与第1固定触点11对置地配置。第2可动触点14与第2固定触点12对置地配置。
可动接触片7包括第1端部7a和第2端部7b。第1端部7a是左右方向上的可动接触片7的一个端部。第2端部7b是左右方向上的可动接触片7的另一个端部。在本实施方式中,第1端部7a是可动接触片7的左方的端部。第2端部7b是可动接触片7的右方的端部。第1可动触点13配置在左右方向上的可动接触片7的中央与第1端部7a之间。第2可动触点14配置在左右方向上的可动接触片7的中央与第2端部7b之间。
可动接触片7配置为能够在上下方向上移动。详细而言,可动接触片7以能够向接触方向Z1和分离方向Z2移动的方式配置。接触方向Z1是第1可动触点13以及第2可动触点14接触第1固定触点11以及第2固定触点12的方向(图1中的下方)。分离方向Z2是第1可动触点13及第2可动触点14从第1固定触点11及第2固定触点12离开的方向(图1中的上方)。
接触片保持部8保持可动接触片7。接触片保持部8在可动接触片7的左右方向的中央保持可动接触片7。因此,接触片保持部8在左右方向上在第1可动触点13与第2可动触点14之间的位置保持可动接触片7。
接触片保持部8包括驱动轴15、支架16和触点弹簧17。驱动轴15在上下方向上延伸。驱动轴15将可动接触片7与驱动装置4连接。驱动轴15被配置为能够向接触方向Z1以及分离方向Z2移动。支架16与可动接触片7连接,保持可动接触片7。触点弹簧17配置在驱动轴15与支架16之间。驱动轴15经由触点弹簧17与支架16连接。
第1固定端子5包括第1触点支承部21、第1中间部22以及第1外部连接部24。第1触点支承部21在壳体2内支承第1固定触点11。第1触点支承部21在左右方向上从第1固定触点11向外侧延伸。另外,左右方向上的外侧是指在左右方向上远离驱动轴15的中心轴线的方向。在左右方向上,内侧是指在左右方向上接近驱动轴15的中心轴线的方向。
第1中间部22位于第1触点支承部21与第1外部连接部24之间。第1中间部22从第1触点支承部向与可动接触片7的移动方向平行的方向、即上下方向延伸。详细而言,第1中间部22从第1触点支承部21向上方延伸。第1外部连接部24从第1中间部22向左方延伸。第1外部连接部24向壳体2的外侧突出。
第1固定端子5具有在第1触点支承部21与第1中间部22之间以及在第1中间部22与第1外部连接部24之间弯曲的形状。第1触点支承部21、第1中间部22和第1外部连接部24也可以一体地形成。或者,第1触点支承部21、第1中间部22和第1外部连接部24也可以相互是分体的,通过焊接等固定手段被相互连接。
第2固定端子6包括第2触点支承部31、第2中间部32以及第2外部连接部34。第2触点支承部31在壳体2内支承第2固定触点12。第2固定端子6具有与第1固定端子5左右对称的形状。第2触点支承部31、第2中间部32以及第2外部连接部34分别与第1触点支承部21、第1中间部22以及第1外部连接部24对应。因此,省略对第2固定端子6的详细说明。
驱动装置4产生使可动接触片7动作的驱动力。驱动装置4通过电磁力使可动接触片7动作。驱动装置4使可动接触片7向接触方向Z1和分离方向Z2移动。驱动装置4配置在可动接触片7的下方。驱动装置4包括线圈41、绕线架42、铁芯43、复位弹簧44和磁轭45。
线圈41卷绕于绕线架42。线圈41和绕线架42与驱动轴15同轴配置。绕线架42包括在绕线架42的轴线方向上贯通的孔42a。铁芯43和复位弹簧44插入到绕线架42的孔42a中。磁轭45与铁芯43连接。
磁轭45包括第1磁轭45a和第2磁轭45b。第1磁轭45a配置在触点装置3与绕线架42之间。第2磁轭45b与第1磁轭45a连接。第2磁轭45b具有U字状的形状。第2磁轭45b配置于线圈41的两侧方和相对于线圈41而与第1磁轭45a相反的一侧。
铁芯43包括固定铁芯43a、可动铁芯43b和环形铁芯43c。固定铁芯43a固定于第2磁轭45b。环形铁芯43c与第1磁轭45a接触。可动铁芯43b与固定铁芯43a以及环形铁芯43c分体。可动铁芯43b配置为能够向接触方向Z1以及分离方向Z2移动。可动铁芯43b在环形铁芯43c内移动。可动铁芯43b与驱动轴15连接。复位弹簧44配置在可动铁芯43b与固定铁芯43a之间。复位弹簧44对可动铁芯43b向分离方向Z2施力。
接着,对继电器1a的动作进行说明。在线圈41中未流过电流而未被励磁时,驱动轴15与可动铁芯43b一起被复位弹簧44的弹性力向分离方向Z2按压。因此,可动接触片7也被向分离方向Z2按压,如图1所示,第1可动触点13及第2可动触点14成为从第1固定触点11及第2固定触点12离开的断开状态。
若线圈41中流动电流而被励磁,则通过线圈41的电磁力,可动铁芯43b克服复位弹簧44的弹性力而向接触方向Z1移动。由此,驱动轴15、支架16和可动接触片7都向接触方向Z1移动,第1可动触点13和第2可动触点14成为与第1固定触点11和第2固定触点12接触的闭合状态。
若线圈41中的电流停止而被消磁,则驱动轴15与可动铁芯43b一起被复位弹簧44的弹性力向分离方向Z2按压。因此,可动接触片7也被向分离方向Z2按压,从而第1可动触点13以及第2可动触点14返回到断开状态。
图2是表示继电器1a的触点壳体18内的结构的俯视图。在图2中,用双点划线表示可动接触片7及驱动轴15的位置。如图1和图2所示,继电器1a包括第1磁铁51、第2磁铁52和第3磁铁53。第1磁铁51、第2磁铁52以及第3磁铁53是用于对在触点之间产生的电弧进行消弧的永久磁铁。
第1磁铁51和第2磁铁52在左右方向上相互分离地配置。第1磁铁51在左右方向上配置在可动接触片7的一侧方。第2磁铁52在左右方向上配置在可动接触片7的一侧方。详细而言,第1磁铁51配置在可动接触片7的左方。第2磁铁52配置在可动接触片7的右方。
第1磁铁51和第2磁铁52以彼此同极相对的方式配置。详细而言,第1磁铁51包括与可动接触片7对置的S极面51S和S极面51S的相反侧的N极面51N。第2磁铁52包括与可动接触片7对置的S极面52S和S极面52S的相反侧的N极面52N。
第3磁铁53在前后方向上与可动接触片7相对地配置。另外,在本实施方式中,前后方向与可动接触片7的宽度方向一致,可动接触片7的宽度方向与可动接触片7的长度方向交叉。第3磁铁53包括与可动接触片7对置的N极面53N和N极面53N的相反侧的S极面53S。
另外,继电器1a包括磁轭47。磁轭47将第1磁铁51、第2磁铁52以及第3磁铁53连接。详细而言,磁轭47与第1磁铁51的N极面51N、第2磁铁52的N极面52N、第3磁铁53的S极面53S连接。
通过以上那样的配置第1磁铁51、第2磁铁52以及第3磁铁53,如图2所示,在第1固定触点11与第1可动触点13之间的位置(以下,称为“第1触点位置P1”)生成朝向左右方向外侧的磁通B1。另外,在第2固定触点12与第2可动触点14之间的位置(以下,称为“第2触点位置P2”)生成朝向左右方向外侧的磁通B2。详细而言,从左右方向上的中央朝向第1端部7a的方向的磁通B1,在第1固定触点11与第1可动触点13之间生成。从左右方向上的中央朝向第2端部7b的方向的磁通B2在第2固定触点12与第2可动触点14之间生成。
因此,在可动接触片7中电流从左方流向右方时,如图2中箭头F1及箭头F2所示,洛伦兹力作用于前后方向。另外,在可动接触片7中电流从右方流向左方时,如图2中箭头F3及箭头F4所示,洛伦兹力作用于前后方向。由此,电弧在箭头F1-F4所示的方向上被拉伸,能够迅速地对电弧进行消弧。
但是,如图3所示,存在第1固定端子5以及第2固定端子6的自身磁场产生的洛伦兹力作用于电弧的情况。例如,在可动接触片7中电流从左方流向右方时,在第1触点位置P1,通过在第1中间部22流动的电流产生的磁场,朝向左右方向的内侧的洛伦兹力F5作用于电弧。在该情况下,洛伦兹力F1、F5的合力F1’作用于电弧,由此,电弧在洛伦兹力的合力F1’的方向上被拉伸。
同样地,在可动接触片7中电流从左方流向右方时,在第2触点位置P2,通过在第2中间部32流动的电流所产生的磁场,朝向左右方向上的内侧的洛伦兹力F6作用于电弧。在该情况下,洛伦兹力F2、F6的合力F2’作用于电弧,由此,电弧在洛伦兹力的合力F2’的方向上被拉伸。
本实施方式的继电器1a具备壁部60,壁部60用于对如上述那样朝向内侧被拉伸的电弧进行消弧。壁部60在左右方向上配置于第1固定触点11以及第2固定触点12的内侧。壁部60包括第1壁部61和第2壁部62。第1壁部61在左右方向上配置于第1触点位置P1与驱动轴15之间。第1壁部61在前后方向上延伸。第2壁部62在左右方向上配置于第2触点位置与驱动轴15之间。第2壁部62在前后方向上延伸。
第1壁部61和第2壁部62由通过电弧的热量而产生消弧气体的消弧材料形成。第1壁部61和第2壁部62例如也可以由不饱和聚酯树脂、三聚氰胺树脂等热固性树脂形成。或者,第1壁部61和第2壁部62也可以由聚烯烃树脂、聚酰胺树脂、聚缩醛树脂等的热塑性树脂等形成。或者,第1壁部61和第2壁部62也可以由其他消弧材料形成。
图4以及图5是触点装置3以及壁部60的放大侧面剖视图。图4表示断开状态下的可动接触片7的位置。图5表示闭合状态下的可动接触片7的位置。如图4和图5所示,第1壁部61和第2壁部62在上下方向上延伸。第1壁部61与第1固定触点11对置。第2壁部62与第2固定触点12对置。第1壁部61在可动接触片7的移动方向上配置于越过第1固定触点11到可动接触片7侧的位置。即,第1壁部61的上端610配置在比第1固定触点11靠上方的位置。第1壁部61从比第1固定触点11靠下方的位置配置到比第1固定触点11靠上方的位置。
第2壁部62与第2固定触点12对置。第2壁部62与第2固定触点12对置。第2壁部62在可动接触片7的移动方向上配置于越过第2固定触点12到可动接触片7侧的位置。即,第2壁部62的上端620配置在比第2固定触点12靠上方的位置。第2壁部62从比第2固定触点12靠下方的位置配置到比第2固定触点12靠上方的位置。
如图5所示,在闭合状态下,第1壁部61与第1固定触点11及第1可动触点相对配置。在闭合状态下,第1壁部61的上端610位于比第1可动触点13的下端靠上方的位置。图6是图5中的VI-VI剖视图。如图6所示,在闭合状态下,从可动接触片7的长度方向观察,第1壁部61与第1可动触点13以及第1固定触点11重叠。
如图4所示,在闭合状态下,第2壁部62与第2固定触点12以及第2可动触点14对置。在闭合状态下,第2壁部62的上端620位于比第2可动触点14的下端靠上方的位置。虽然省略图示,但与第1壁部61同样地,在闭合状态下,从可动接触片7的长度方向观察,第2壁部62与第2可动触点14以及第2固定触点12重叠。
如图4及图5所示,可动接触片7具有避免与壁部60干涉的形状。可动接触片7具有向远离壁部60的方向凹陷的形状。即,可动接触片7具有朝向上方凸出地弯曲的形状。详细而言,可动接触片7包括第1触点支承部71、第2触点支承部72、中间部73、第1弯曲部74和第2弯曲部75。
第1触点支承部71支承第1可动触点13。第1触点支承部71包括上述的第1端部7a。第2触点支承部72支承第2可动触点14。第2触点支承部72包括上述的第2端部7b。中间部73位于可动接触片7的左右方向上的中央。在中间部73安装有接触片保持部8。在中间部73安装有驱动轴15。中间部73位于比第1触点支承部71及第2触点支承部72靠上方的位置。
第1弯曲部74位于第1触点支承部71与中间部73之间。第1弯曲部74具有向远离第1壁部61的方向弯曲的形状。即,第1弯曲部74具有从第1触点支承部71向上方弯曲的形状。第1弯曲部74与第1壁部61相对配置。
第2弯曲部75位于第2触点支承部72与中间部73之间。第2弯曲部75具有向远离第2壁部62的方向弯曲的形状。即,第2弯曲部75具有从第2触点支承部72向上方弯曲的形状。第2弯曲部75与第2壁部62对置配置。
如图5所示,在闭合状态下,第1壁部61的上端610位于比第1触点支承部71的底面靠上方的位置。在闭合状态下,第2壁部62的上端620位于比第2触点支承部72的底面靠上方的位置。第1弯曲部74与第1触点支承部71的连接点76位于第1壁部61的外侧。第2弯曲部75与第2触点支承部72的连接点77位于第2壁部62的外侧。在闭合状态下,第1弯曲部74与第1触点支承部71的连接点76位于比第1壁部61的上端610靠下方的位置。在闭合状态下,第2弯曲部75与第2触点支承部72的连接点77位于比第2壁部62的上端620靠下方的位置。
如图2所示,壁部60还包括第3壁部63和第4壁部64。第3壁部63和第4壁部64在前后方向上相互分离地配置。在第3壁部63与第4壁部64之间配置有接触片支承部8。详细而言,在第3壁部63与第4壁部64之间配置有支架16。支架16通过第3壁部63和第4壁部64止转。
在以上说明的第1实施方式的继电器1a中,第1壁部61以及第2壁部62在可动接触片7的移动方向上配置于越过第1固定触点11以及第2固定触点12到可动接触片7侧的位置。因此,在电弧被朝向第1固定触点11及第2固定触点12的内侧拉伸的情况下,电弧容易碰到第1壁部61及第2壁部62。由此,能够迅速地对电弧进行消弧。
另外,在闭合状态下,可动接触片7具有以不与第1壁部61以及第2壁部62干涉的方式弯曲的形状。因此,即使如上述那样配置第1壁部61和第2壁部62,也能够避免可动接触片7与第1壁部61以及第2壁部62的干涉。
可动接触片7包括第1弯曲部74和第2弯曲部75。通过这样的可动接触片7的形状,能够避免与第1壁部61以及第2壁部62的干涉。另外,能够将电弧的起点限定于第1弯曲部74以及第2弯曲部75。由此,从第1弯曲部74拉伸的电弧容易碰到第1壁部61。另外,从第2弯曲部75拉伸的电弧容易碰到第2壁部62。由此,能够更迅速地对电弧进行消弧。
在闭合状态下,从可动接触片7的长度方向观察,第1壁部61与第1可动触点13重叠。另外,在闭合状态下,从可动接触片7的长度方向观察,第2壁部62与第2可动触点14重叠。因此,电弧变得容易碰到第1壁部61及第2壁部62。由此,能够更迅速地对电弧进行消弧。
以上,对第1实施方式的继电器1a进行了说明,但第1~第3磁铁51-53的配置、或者极性不限于上述的第1实施方式,也可以变更。例如,图7是表示第2实施方式的继电器1b的触点壳体18内的结构的俯视图。
在第2实施方式的继电器1b中,第1磁铁51和第2磁铁52以彼此异极相对配置的方式配置。第1磁铁51的S极面51S与可动接触片7对置配置,第2磁铁52的N极面52N与可动接触片7对置配置。在第2实施方式的继电器1b中,省略了第1实施方式的第3磁铁53。第2实施方式的继电器1b的其他结构与第1实施方式的继电器1a相同。
在第2实施方式的继电器1b中,在第1触点位置P1和第2触点位置P2生成朝向左方的磁通B11。因此,在可动接触片7中电流从左方流向右方时,如箭头F11及箭头F12所示,洛伦兹力作用于前后方向。
另外,存在由第1固定端子5以及第2固定端子6的自身磁场产生的洛伦兹力作用于电弧的情况。例如,在可动接触片7中电流从左方流向右方时,在第1触点位置P1,通过在第1中间部22流动的电流产生的磁场,朝向左右方向的内侧的洛伦兹力F15作用于电弧。在该情况下,洛伦兹力F11、F15的合力F11’作用于电弧,由此,电弧被向洛伦兹力的合力F11’的方向拉伸。
同样地,在可动接触片7中电流从左方流向右方时,在第2触点位置P2,通过在第2中间部32流动的电流产生的磁场,朝向左右方向的内侧的洛伦兹力F16作用于电弧。在该情况下,洛伦兹力F12、F16的合力F12’作用于电弧,由此,电弧被向洛伦兹力的合力F12’的方向拉伸。即使在这样的情况下,在第2实施方式的继电器1b中,也与第1实施方式的继电器1a同样地,能够通过第1壁部61以及第2壁部62迅速地对电弧进行消弧。
图8是表示第3实施方式的继电器1c的触点壳体18内的结构的俯视图。在第3实施方式的继电器1c中,第1磁铁51和第2磁铁52在前后方向上分离地配置。第1磁铁51和第2磁铁52以彼此异极相对的方式配置。详细而言,第1磁铁51的S极面51S与可动接触片7对置配置,第2磁铁52的N极面52N与可动接触片7对置配置。第3实施方式的继电器1c的其他结构与第1实施方式的继电器1a相同。
在第3实施方式的继电器1c中,在第1触点位置P1和第2触点位置P2生成沿着前后方向的磁通B21。因此,在可动接触片7中电流从左方流向右方时,如箭头F21及箭头F22所示,朝向左右方向上的内侧作用有洛伦兹力。因此,在第3实施方式的继电器1c中,即使不产生由第1固定端子5以及第2固定端子6的自身磁场引起的洛伦兹力,电弧也被朝向内侧拉伸。因此,即使没有第1中间部22以及第2中间部32,电弧也朝向内侧被拉伸。即使在这样的情况下,在第3实施方式的继电器1c中,也与第1实施方式的继电器1a同样地,能够通过第1壁部61以及第2壁部62迅速地对电弧进行消弧。
以上,对第1~第3实施方式的继电器1a-1c进行了说明,但可动接触片7的形状或配置不限于上述实施方式,也可以变更。例如,图9A是表示第4实施方式的继电器1d的触点壳体18内的结构的俯视图。图9B是表示第4实施方式的继电器1d的触点壳体18内的结构的侧视图。
如图9A和图9B所示,可动接触片7包括第1孔81和第2孔82。第1孔81和第2孔82在上下方向上贯通可动接触片7。第1孔81在上下方向上与第1壁部61对置配置。第2孔82在上下方向上与第2壁部62对置配置。详细而言,第1孔81配置于第1壁部61的上方。第2孔82配置于第2壁部62的上方。第1孔81具有第1壁部61能够插入的大小。第2孔82具有第2壁部62能够插入的大小。
在第4实施方式的继电器1d中,至少在闭合状态下,第1壁部61配置于第1孔81内,第2壁部62配置于第2孔82内。由此,能够避免第1壁部61以及第2壁部62与可动接触片7的干涉。此外,不仅在闭合状态下,在断开状态下,第1壁部61配置在第1孔81内,第2壁部62配置在第2孔82内也可以。
图10A是表示第5实施方式的继电器1e的触点壳体18内的结构的俯视图。图10B是表示第5实施方式的继电器1e的触点壳体18内的结构的侧视图。
如图10A和图10B所示,可动接触片7包括第1凹部83和第2凹部84。第1凹部83和第2凹部84具有从可动接触片7的底面向上方凹陷的形状。第1凹部83在上下方向上与第1壁部61对置配置。第2凹部84在上下方向上与第2壁部62对置配置。详细而言,第1凹部83配置于第1壁部61的上方。第2凹部84配置于第2壁部62的上方。第1凹部83具有第1壁部61的上端610能够插入的大小。第2凹部84具有第2壁部62的上端620能够插入的大小。
在第4实施方式的继电器1d中,至少在闭合状态下,第1壁部61配置于第1凹部83内,第2壁部62配置于第2凹部84内。由此,能够避免第1壁部61以及第2壁部62与可动接触片7干涉。此外,不仅在闭合状态下,在断开状态下,第1壁部61也可以配置在第1凹部83内,第2壁部62也可以配置在第2凹部84内。
图11是表示第6实施方式的继电器1f的触点壳体18内的结构的侧视图。如图11所示,可动接触片7包括第1触点支承部91、第2触点支承部92、中间部93、第1弯曲部94和第2弯曲部95。第1触点支承部91支承第1可动触点13。第2触点支承部92支承第2可动触点14。第1弯曲部94具有从第1触点支承部91向上方弯曲的形状。第1弯曲部94在左右方向上位于第1触点支承部91的外侧。第2弯曲部95具有从第2触点支承部92向上方弯曲的形状。第2弯曲部95在左右方向上位于第2触点支承部92的外侧。中间部93位于第1弯曲部94与第2弯曲部95之间。中间部93位于比第1触点支承部91以及第2触点支承部92靠上方的位置。
在第6实施方式的继电器1f中,第1触点支承部91的内端部910与第2触点支承部92的内端部920相互分离地配置。第1壁部61以及第2壁部62,与第1触点支承部91的内端部910和第2触点支承部92的内端部920之间的空间对置配置。至少在闭合状态下,在第1触点支承部91的内端部910与第2触点支承部92的内端部920之间,配置有第1壁部61和第2壁部62。由此,能够避免第1壁部61以及第2壁部62与可动接触片7的干涉。此外,不仅在闭合状态下,在断开状态下,也可以在第1触点支承部91的内端部910与第2触点支承部92的内端部920之间配置第1壁部61和第2壁部62。
在上述的实施方式中,驱动装置4从线圈41侧拉入驱动轴15,由此可动接触片7向接触方向Z1移动。另外,通过驱动装置4将驱动轴15从线圈41侧推出,可动接触片7向分离方向Z2移动。但是,用于接通和断开触点的驱动轴15的动作方向也可以与上述的实施方式相反。即,也可以是,驱动装置4将驱动轴15拉入到线圈41侧,由此可动接触片7向分离方向Z2移动。也可以是,驱动装置4从线圈41侧推出驱动轴15,由此可动接触片7向接触方向Z1移动。即,接触方向Z1和分离方向Z2也可以与上述的实施方式上下相反。
例如,图12是表示第7实施方式的继电器1g的触点壳体18内的结构的侧视图。如图12所示,在第7实施方式的继电器1g中,可动接触片7配置于第1固定触点11以及第2固定触点12的下方。通过可动接触片7向上方即接触方向Z1移动,从而第1可动触点13以及第2可动触点14,与第1固定触点11以及第2固定触点12接触。通过可动接触片7向下方即分离方向Z2移动,第1可动触点13及第2可动触点14,从第1固定触点11及第2固定触点12离开。
在第7实施方式的继电器1g中,也与第1实施方式的继电器1a同样地配置有第1壁部61以及第2壁部62。在第7实施方式的继电器1g中,第1壁部61的下端611和第2壁部62的下端621与可动接触片7对置。另外,可动接触片7具有以避免与第1壁部61以及第2壁部62的干涉的方式弯曲的形状。另外,可动接触片7也可以是与第4~第6实施方式的继电器1d-1f的可动接触片7相同的形状。
以上,对本发明的实施方式进行了说明,但本发明并不限定于上述实施方式,在不脱离发明的主旨的范围内能够进行各种变更。例如,也可以变更驱动装置4的结构。也可以变更线圈41、绕线架42、铁芯43、复位弹簧44、或磁轭45的形状或配置。也可以变更壳体2的形状或配置。
也可以变更第1固定端子5、第2固定端子6、可动接触片7的形状或配置。例如,第1外部连接部24以及第2外部连接部34也可以从壳体2向上方突出。或者,第1外部连接部24以及第2外部连接部34也可以从壳体2向前后方向突出。
第1固定触点11可以与第1固定端子5分体,或者也可以是一体。第2固定触点12可以与第2固定端子6分体,或者也可以是一体。第1可动触点13可以与可动接触片7分体,或者也可以是一体。第2可动触点14可以与可动接触片7分体,或者也可以是一体。
也可以变更壁部60的形状或配置。例如,也可以变更第1~第4壁部61-64的形状或配置。也可以省略第3壁部63以及第4壁部64。
产业上的可利用性
根据本发明,在继电器中,能够在避免阻碍可动接触片的动作的同时,提高电弧的阻断性能。
- 继电器状态判定装置、继电器状态判定系统、继电器状态判定方法及程序
- 继电器状态判定装置、继电器状态判定系统、继电器状态判定方法及程序