超声波振子、超声波处置器具及超声波振子的制造方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及超声波振子、超声波处置器具及超声波振子的制造方法。
背景技术
以往已知有这样的超声波处置器具:具有与被供给的驱动信号相应地产生超声波振动的超声波振子,通过对生物体组织赋予该超声波振动来处置该生物体组织(例如参照专利文献1)。
专利文献1所记载的超声波振子具有多个压电元件,这些压电元件在层叠的状态下利用沿着层叠方向贯通的螺栓一体化,与驱动信号相应地沿着层叠方向交替地反复膨胀和收缩。即,该超声波振子由BLT(螺栓紧固朗之万型振子)构成。
专利文献1:日本发明专利第6261833号
发明内容
然而,超声波振子存在个体差异和批次间差异。例如存在这样的情况:在同样制造的两个超声波振子中的一个超声波振子中产生的超声波振动的振幅成为期望的振幅,但在另一个超声波振子中产生的超声波振动的振幅不成为期望的振幅。
只要像专利文献1所记载的超声波振子那样调整多个压电元件的厚度尺寸,就能够将该超声波振动的振幅调整为期望的振幅。但是,在针对每个超声波振子调整多个压电元件的厚度尺寸的情况下,有时根据超声波振子而压电元件整体的电容与设计上的电容大不相同。在这样电容与设计上的电容大不相同的情况下,在控制该超声波振子的过程中,需要将控制构造自设计上的制造构造大幅度地变更。即,需要进行大幅度的设计变更。
于是,要求一种不进行大幅度的设计变更就能够容易地得到期望的振幅的技术。
本发明即是鉴于上述情况而完成的,其目的在于,提供容易地得到期望的振幅的超声波振子、超声波处置器具及超声波振子的制造方法。
为了解决上述的问题、达到目的,本发明的超声波振子包括振子主体,该振子主体产生用于使处置生物体组织的处置部振动的超声波振动,所述振子主体具有与被供给的驱动信号相应地交替地反复膨胀和收缩的多个压电元件,通过将所述多个压电元件以沿着膨胀和收缩的方向层叠的状态一体地连结而构成所述振子主体,所述多个压电元件包括:第1压电元件,其在第1时机膨胀,在第2时机收缩;以及第2压电元件,其膨胀和收缩的时机与所述第1压电元件的膨胀和收缩的时机不同。
本发明的超声波处置器具包括:处置部,其处置生物体组织;以及超声波振子,其包括振子主体,该振子主体产生用于使所述处置部振动的超声波振动,所述振子主体具有与被供给的驱动信号相应地交替地反复膨胀和收缩的多个压电元件,通过将所述多个压电元件以沿着膨胀和收缩的方向层叠的状态一体地连结而构成所述振子主体,所述多个压电元件包括:第1压电元件,其在第1时机膨胀,在第2时机收缩;以及第2压电元件,其膨胀和收缩的时机与所述第1压电元件的膨胀和收缩的时机不同。
在本发明的超声波振子的制造方法中,该超声波振子具有与被供给的驱动信号相应地交替地反复膨胀和收缩的多个压电元件,所述多个压电元件以沿着膨胀和收缩的方向层叠的状态一体地连结,通过恒定电流控制过程中的所述多个压电元件的膨胀和收缩而产生超声波振动,其中,测量相对于通常状态以使每次所述多个压电元件中的一个压电元件的极化方向反转了的姿势进行了配置的各状态下的所述超声波振子的振幅,该通常状态为以所述多个压电元件的极化方向沿着特定的方向的姿势进行了配置的状态,基于所述振幅决定使极化方向反转的所述压电元件。
采用本发明的超声波振子、超声波处置器具及超声波振子的制造方法,能够容易地得到期望的振幅。
附图说明
图1是表示实施方式的处置系统的图。
图2是表示超声波振子的图。
图3是表示第1电极板的图。
图4是表示第2电极板的图。
图5是表示超声波振子的制造方法的流程图。
图6是说明超声波振子的制造方法的图。
图7是说明超声波振子的制造方法的图。
具体实施方式
〔处置系统的概略结构〕
图1是表示本实施方式的处置系统1的概略结构的图。
处置系统1通过对生物体组织的成为处置的对象的部位(以下记载为对象部位)赋予超声波能量来处置该对象部位。在此,该处置例如是指对象部位的凝固和切开。如图1所示,该处置系统1包括超声波处置器具2和控制装置3。
〔超声波处置器具的结构〕
超声波处置器具2例如是在穿过腹壁的状态下处置对象部位的医疗用处置器具。如图1所示,该超声波处置器具2包括手持件4和超声波转换器5。
如图1所示,手持件4包括保持壳41、操作旋钮42、开关43、护套44、钳构件45以及超声波探头46。
保持壳41支承超声波处置器具2整体。
操作旋钮42以能够相对于保持壳41移动的方式安装于该保持壳41,接受手术操作者的开闭操作。
开关43以露出到保持壳41的外部的状态设置,接受手术操作者的输出开始操作。而且,开关43向控制装置3输出与该输出开始操作相应的操作信号。
护套44具有圆筒形状。另外,以下将护套44的中心轴线记载为中心轴线Ax(图1)。此外,以下将沿着中心轴线Ax的一侧记载为顶端侧Ar1(图1),将另一侧记载为基端侧Ar2(图1)。而且,护套44通过其基端侧Ar2的一部分从保持壳41的顶端侧Ar1插入到该保持壳41的内部而安装于该保持壳41。
钳构件45以能够旋转的方式安装在护套44的顶端侧Ar1的端部,在其与超声波探头46的顶端侧Ar1的部分之间把持对象部位。另外,在上述的保持壳41和护套44的内部设有开闭机构(省略图示),该开闭机构与手术操作者对操作旋钮42进行的开闭操作相应地使钳构件45相对于超声波探头46的顶端侧Ar1的部分开闭。
超声波探头46相当于本发明的处置部。该超声波探头46具有沿着中心轴线Ax呈直线状延伸的长条形状,如图1所示以其顶端侧Ar1的部分突出到外部的状态贯穿于护套44的内部。此外,超声波探头46的基端侧Ar2的端部与构成超声波转换器5的超声波振子6(参照图2的(a))连接。而且,超声波探头46将超声波振子6所产生的超声波振动从基端侧Ar2的端部向顶端侧Ar1的端部传递。
如图1所示,超声波转换器5包括超声波转换器壳51和超声波振子6(参照图2的(a))。
超声波转换器壳51支承超声波振子6,并且以装拆自如的方式连接于保持壳41。
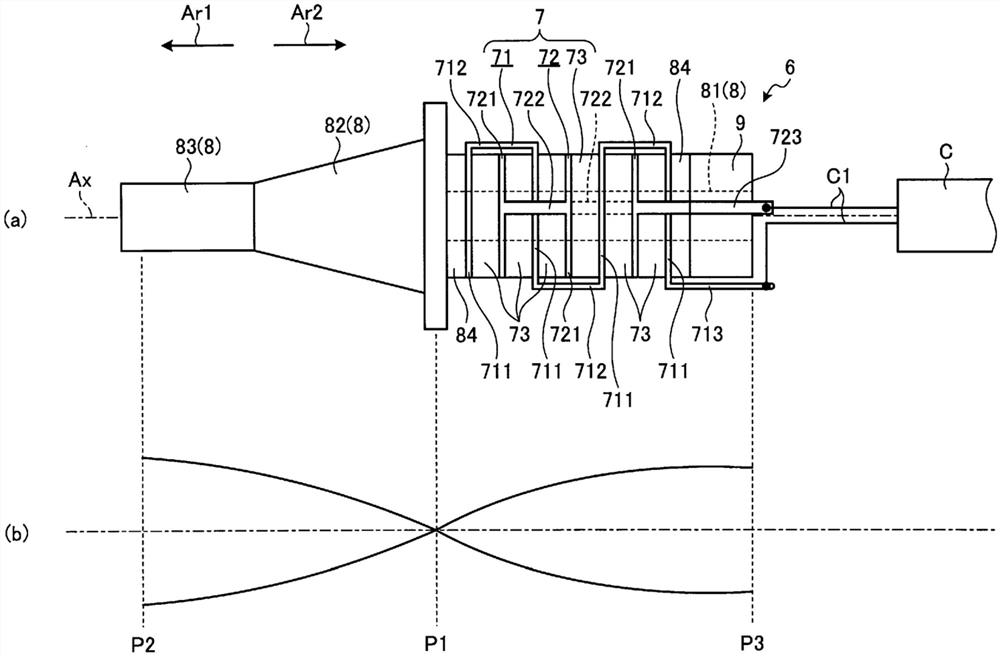
图2是表示超声波振子6的图。
超声波振子6在控制装置3的控制下产生超声波振动。在本实施方式中,超声波振子6由BLT(螺栓紧固朗之万型振子)构成。如图2的(a)所示,该超声波振子6包括振子主体7、前块8以及后块9。
如图2的(a)所示,振子主体7包括第1电极板71、第2电极板72以及多个(在本实施方式中是6块)压电元件73。
图3是表示第1电极板71的图。
第1电极板71是被从控制装置3供给驱动信号的部分。如图2的(a)或图3所示,该第1电极板71包括多个(在本实施方式中是4张)负电极板711、多个(在本实施方式中是3个)负电极布线部712、以及导线连接端子713。
如图3所示,多个负电极板711各自具有在中央具有开口711a的圆板形状,并沿着中心轴线Ax并列设置。
多个负电极布线部712是将彼此相邻的负电极板711的外缘部相互间电连接的部分。
导线连接端子713是与构成电缆C(图1、图2的(a))的导线C1(图2的(a))连接的部分。该导线连接端子713从多个负电极板711中、位于最靠基端侧Ar2的位置的负电极板711的外缘朝向基端侧Ar2延伸。
图4是表示第2电极板72的图。
第2电极板72是被从控制装置3供给驱动信号的部分。如图2的(a)或图4所示,该第2电极板72包括多个(在本实施方式中是3枚)正电极板721、多个(在本实施方式中是两个)正电极布线部722、以及导线连接端子723。
如图4所示,多个正电极板721各自具有在中央具有开口721a的圆板形状,沿着中心轴线Ax并列设置。另外,正电极板721具有与负电极板711大致相同的形状。
多个正电极布线部722是将彼此相邻的正电极板721的外缘部相互间电连接的部分。
而且,如图2的(a)所示,负电极板711和正电极板721沿着中心轴线Ax交替地配设。
导线连接端子723是与构成电缆C的导线C1连接的部分。该导线连接端子723从多个正电极板721中的、位于最靠基端侧Ar2的位置的正电极板721的外缘朝向基端侧Ar2延伸。
多个压电元件73各自具有在中央具有开口(省略图示)的圆板形状,分别配设在负电极板711和正电极板721之间。即,多个压电元件73沿着中心轴线Ax层叠。而且,多个压电元件73通过与供给到第1电极板71和第2电极板72的驱动信号相应地在沿着中心轴线Ax的层叠方向产生电位差,从而沿着该层叠方向交替地反复膨胀和收缩。由此,超声波振子6产生将该层叠方向作为振动方向的纵向振动的超声波振动。
前块8具有沿着中心轴线Ax呈直线状延伸的长条形状。如图2的(a)所示,该前块8包括元件安装部81、截面积变化部82以及探头安装部83。
元件安装部81是沿着中心轴线Ax呈直线状延伸的螺栓,分别贯穿于多个负电极板711的各开口711a、多个正电极板721的各开口721a以及多个压电元件73的各开口(省略图示)。而且,如图2的(a)所示,在元件安装部81的基端侧Ar2的端部安装有由螺母构成的后块9。
截面积变化部82相当于本发明的变幅杆。该截面积变化部82设在元件安装部81的顶端侧Ar1的端部,是用于放大超声波振动的振幅的部分。此外,如图2的(a)所示,截面积变化部82的基端侧Ar2的端部的直径尺寸被设定得比元件安装部81的直径尺寸大,截面积变化部82具有随着朝向顶端侧Ar1去而截面积减少的圆锥台形状。即,多个负电极板711、多个正电极板721以及多个压电元件73被元件安装部81沿着中心轴线Ax贯通并被夹持在截面积变化部82和后块9之间,从而以具有大致圆柱形状的状态一体地连结。另外,在本实施方式中,在截面积变化部82和压电元件73之间以及后块9和压电元件73之间分别安装有绝缘板84(图2的(a))。
如图2的(a)所示,探头安装部83设在截面积变化部82的顶端侧Ar1的端部,沿着中心轴线Ax呈直线状延伸。而且,在超声波转换器5连接于手持件4的状态下,超声波探头46的基端侧Ar2的端部连接于探头安装部83的顶端侧Ar1的端部。
〔控制装置的结构〕
超声波处置器具2利用电缆C(图1)以装拆自如的方式连接于控制装置3。而且,控制装置3通过经由电缆C而总体地控制超声波处置器具2的动作。如图1所示,该控制装置3包括能量源31、检测电路32以及处理器33。
能量源31在处理器33的控制下通过经由电缆C(一对导线C1)而向超声波振子6输出作为交流电力的驱动信号。
检测电路32基于从能量源31向超声波振子6输出的驱动信号检测US信号。而且,检测电路32将检测到的US信号向处理器33输出。
在此,作为该US信号,能够例示出驱动信号的电压的相位信号(以下记载为US电压相位信号)、该驱动信号的电流的相位信号(以下记载为US电流相位信号)、该驱动信号的电流值(以下记载为US电流)、该驱动信号的电压值(以下记载为US电压)、根据该US电流和该US电压计算的阻抗值(以下记载为US阻抗)等。
处理器33例如是CPU(Central Processing Unit:中央处理器)、FPGA(Field-Programmable Gate Array:现场可编程逻辑门阵列)等,遵照存储在存储器(省略图示)中的程序控制处置系统1整体的动作。
另外,在以下的“处置系统的动作”中说明处理器33的功能。
〔处置系统的动作〕
接着,说明上述的处置系统1的动作。
手术操作者手持超声波处置器具2,在例如使用套管针等将该超声波处置器具2的顶端侧Ar1的部分穿过腹壁之后插入到腹腔内。然后,手术操作者操作操作旋钮42使其开闭,利用钳构件45和超声波探头46的顶端侧Ar1的部分把持对象部位。之后,手术操作者按下开关43。然后,处理器33与来自开关43的操作信号相应地执行以下所示的控制。
处理器33控制能量源31的动作,扫描从该能量源31输出的驱动信号的频率,基于从检测电路32输出的US信号(例如US电流、US电流相位信号及US电压相位信号的相位差等)搜索超声波振子6的共振频率。然后,处理器33控制能量源31的动作,基于US信号(例如US电流、US电流相位信号及US电压相位信号的相位差等)执行将从该能量源31输出的驱动信号的频率锁定为该搜索到的共振频率的PLL控制。在本实施方式中,处理器33在执行PLL控制时执行将US电流保持恒定的恒定电流控制。由此,超声波振子6产生超声波振动(纵向振动)。在此,截面积变化部82的基端侧Ar2的端部成为纵向振动的波节P1(图2的(b))。此外,探头安装部83的顶端侧Ar1的端部和后块9的基端侧Ar2的端部分别成为纵向振动的波腹P2、P3(图2的(b))。即,超声波振子6的全长为纵向振动的波长的约1/2。
然后,将在超声波振子6中产生的纵向振动向超声波探头46传递。由此,超声波探头46的顶端侧Ar1的部分在该纵向振动的作用下以期望的振幅进行振动。即,从超声波探头46的顶端侧Ar1的部分对把持在钳构件45和该顶端侧Ar1的部分之间的对象部位赋予超声波振动。换言之,从该顶端侧Ar1的部分对对象部位赋予超声波能量。由此,在该顶端侧Ar1的部分和对象部位之间产生摩擦热。然后,将该对象部位凝固并切开。
〔超声波振子的制造方法〕
接着,说明超声波振子6的制造方法。
图5是表示超声波振子6的制造方法的流程图。图6和图7是说明超声波振子6的制造方法的图。具体而言,图6的(a)示出将多个压电元件73以通常状态配置的结构。图6的(b)示出以使多个压电元件73中的1块压电元件73e的极化方向自通常状态反转的姿势进行了配置的结构。
另外,在图6中,将多个压电元件73的安装位置从接近截面积变化部82(波节P1)的一侧朝向基端侧Ar2按顺序设为安装位置“1”~“6”。此外,将各安装位置“1”~“6”的压电元件73分别设为压电元件73a~73f。并且,用“+”表现压电元件73内部的正电荷,用“-”表现负电荷,用箭头表现极化方向。此外,用单点划线表现负电极板711的位置和正电极板721的位置。
在此,图6的(a)所示的通常状态是指将多个压电元件73分别以负电荷“-”侧与负电极板711相对、正电荷“+”侧与正电极板721相对的姿势进行了配置的状态。
首先,作业人员执行以下所示的工序S1。
作业人员将多个压电元件73设定为图6的(a)所示的通常状态。此外,作业人员操作控制装置3,利用该控制装置3执行超声波振子6的恒定电流控制。由此,超声波振子6产生超声波振动(纵向振动)。在该情况下,由于多个压电元件73被设定为通常状态,因此在同一个第1时机膨胀,并且在同一个第2时机收缩。然后,作业人员通过使用振动计等来测量该纵向振动的振幅。
在工序S1之后,作业人员判断在工序S1中测量的振幅是否是期望的振幅(工序S2)。
在判断为是期望的振幅的情况(工序S2:是)下,作业人员决定以通常状态使用超声波振子6(工序S3)。在工序S3之后,作业人员结束超声波振子6的制造方法。
另一方面,在判断为不是期望的振幅的情况(工序S2:否)下,作业人员执行以下所示的工序S4。
例如,如图6的(b)所示,作业人员以使安装位置“1”~“6”中的任一个压电元件73(在图6的(b)的例子中是压电元件73e)的极化方向自通常状态反转的姿势进行配置。此外,作业人员与工序S1同样地操作控制装置3,利用该控制装置3执行超声波振子6的恒定电流控制。由此,超声波振子6产生超声波振动(纵向振动)。在该情况下,例如在图6的(b)的状态下,多个压电元件73中的压电元件73a~73d、73f在同一个第1时机膨胀,并且在同一个第2时机收缩。即,压电元件73a~73d、73f相当于本发明的第1压电元件。另一方面,由于压电元件73e的极化方向自通常状态反转,因此该压电元件73e与压电元件73a~73d、73f相反地在第1时机收缩,并且在第2时机膨胀。即,压电元件73e相当于本发明的第2压电元件。然后,作业人员通过使用振动计等来测量该纵向振动的振幅。
在工序S4之后,作业人员判断是否针对安装位置“1”~“6”的全部压电元件73执行了工序S4(工序S5)。
在判断为未针对全部压电元件73执行的情况(工序S5:否)下,作业人员返回到工序S4。
另一方面,在判断为针对全部压电元件73执行了的情况(工序S5:是)下,作业人员执行以下所示的工序S6。
作业人员参照在工序S4中测量的振幅,决定安装位置“1”~“6”中的、通过使极化方向反转而成为接近期望的振幅的振幅的安装位置。然后,作业人员决定以使该决定的安装位置的压电元件73的极化方向自通常状态反转的姿势使用超声波振子6。另外,在本实施方式中,如图6的(b)所示,作为使极化方向反转的安装位置决定安装位置“5”。
在工序S4中分别测量的各振幅相对于在工序S1中测量的通常状态下的振幅的增加率(以下记载为振幅增加率)与使极化方向反转了的压电元件73的安装位置“1”~“6”的关系如图7所示。
即使在使安装位置“1”~“6”的压电元件73a~73f中的任一个压电元件的极化方向自通常状态反转了的情况下,振幅增加率也成为正的值。换言之,成为比通常状态的振幅高的振幅。这是考虑到以下的原因。
在使压电元件73a~73f中的任一个压电元件的极化方向自通常状态反转了的情况下,超声波振子6的振动效率与通常状态相比变差。而且,若振动效率变差,则恒定电流控制过程中对每个压电元件73a~73f施加的电压值与通常状态相比升高。即,在使压电元件73a~73f中的任一个压电元件的极化方向自通常状态反转了的情况下,由于施加的电压值与通常状态相比升高,因此成为比通常状态的振幅高的振幅。
此外,振幅增加率在使安装位置“1”的压电元件73a的极化方向自通常状态反转了的情况下成为最高的数值,并随着使极化方向反转的压电元件73的安装位置从安装位置“2”朝向“6”(随着远离波节P1)而变少。这是考虑到以下的原因。
就多个压电元件73中的、对超声波振子6的振动赋予的振动赋予率而言,安装在接近波节P1的位置的压电元件73a的振动赋予率最高,按照安装在安装位置“1”~“6”的压电元件73a~73f的顺序变小。即,若使振动赋予率较高的压电元件73的极化方向自通常状态反转,则振幅增加率升高,若使振动赋予率较低的压电元件73的极化方向自通常状态反转,则振幅增加率降低。
根据以上说明的本实施方式,起到以下的效果。
在本实施方式的超声波振子6中,多个压电元件73包括在第1时机膨胀而在第2时机收缩的压电元件73a~73d、73f和在第1时机收缩而在第2时机膨胀的压电元件73e。即,仅使多个压电元件73中的压电元件73e的极化方向自通常状态反转,就能够得到期望的振幅。此时,即使在使压电元件73e的极化方向自通常状态反转了的情况下,压电元件73整体的电容也不自通常状态下的压电元件73整体的电容发生变化。因此,即使在使压电元件73e的极化方向自通常状态反转了的情况下,也无需在控制超声波振子6的过程中自设计上的制造构造变更控制构造。即,无需进行大幅度的设计变更。
根据以上的内容,采用本实施方式的超声波振子6,不进行大幅度的设计变更就能够容易地得到期望的振幅。
此外,在本实施方式的超声波振子6中,多个压电元件73在比波节P1靠基端侧Ar2的位置沿着中心轴线Ax层叠。换言之,超声波振子6仅存在1个纵向振动的波节P1,其全长为纵向振动的波长的约1/2。因此,能够谋求超声波振子6的小型化进而谋求超声波处置器具2的小型化。
(其他的实施方式)
至此说明了用于实施本发明的方式,但本发明不应仅被上述的实施方式所限定。
在上述的实施方式中,多个压电元件73由6块构成,但也可以由其他的数量构成。此外,将6块压电元件73中的、从波节P1数第5个压电元件73e作为本发明的第2压电元件,但不限于此,也可以将其他的位置的压电元件73作为本发明的第2压电元件。并且,本发明的第2压电元件的数量不限于1块,也可以设为其他的数量。
在上述的实施方式中,作为本发明的第2压电元件的压电元件73e与作为本发明的第1压电元件的压电元件73a~73d、73f相反地在第1时机收缩而在第2时机膨胀,但不限于此。作为本发明的第2压电元件,只要其膨胀和收缩的时机与本发明的第1压电元件的膨胀和收缩的时机不同,就也可以将其膨胀和收缩的时机设为其他的时机。即,若使本发明的第2压电元件的膨胀和收缩的时机与本发明的第1压电元件的膨胀和收缩的时机不同,则超声波振子6的振动效率与通常状态相比变差,因此认为会成为比通常状态的振幅高的振幅。
在上述的实施方式中,超声波振子6具有超声波振动的波长的约1/2的全长,但不限于此,也可以设为具有其他的全长、例如与该波长大致相同的全长的结构。
在上述的实施方式中,作为超声波处置器具2,采用对对象部位赋予超声波能量的结构,但不限于此,也可以采用对对象部位赋予高频能量和热能中的至少一种能量以及超声波能量的结构。在此,“对对象部位赋予高频能量”是指向对象部位通入高频电流。此外,“对对象部位赋予热能量”是指将加热器等的热传导到对象部位。
1、处置系统;2、超声波处置器具;3、控制装置;4、手持件;5、超声波转换器;6、超声波振子;7、振子主体;8、前块;9、后块;31、能量源;32、检测电路;33、处理器;41、保持壳;42、操作旋钮;43、开关;44、护套;45、钳构件;46、超声波探头;51、超声波转换器壳;71、第1电极板;72、第2电极板;73、73a~73f、压电元件;81、元件安装部;82、截面积变化部;83、探头安装部;84、绝缘板;711、负电极板;711a、开口;712、负电极布线部;713、导线连接端子;721、正电极板;721a、开口;722、正电极布线部;723、导线连接端子;Ar1、顶端侧;Ar2、基端侧;Ax、中心轴线;C、电缆;C1、导线;P1、波节;P2、P3、波腹。
- 超声波振子、超声波处置器具及超声波振子的制造方法
- 超声波振子组件、超声波内窥镜以及超声波振子组件的制造方法