自卸车安全防护系统及方法
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及自动控制和环卫作业车辆领域,尤其涉及自卸车安全防护系统及方法。
背景技术
目前,自卸车应用领域广泛,作业的环境多种多样,在恶劣环境下作业时有发生自卸车倾翻的安全事故。现有技术是在自卸车车体上加装角度传感器、震动控制器进行监测和控制自卸车的装卸操作,例如底面不平,左右两侧水平高度差过大,控制自卸车停止装卸动作;或者在箱体举升过程中因货物自卸不完全导致重心偏移,通过震动控制器进行补偿,从而降低倾翻风险。
现有技术通过监测倾角和重心偏移防止自卸车的倾翻,但恶劣环境下还可能出现大风等极端天气条件,在极端天气条件下无法及时预防自卸车的倾翻。
发明内容
本发明的目的在于提供自卸车安全防护系统及方法。
本发明采用的技术方案是:
自卸车安全防护系统,其包括控制系统以及与控制系统连接的六轴传感器、压力传感器、风力传感器、阻尼器和液压装置,手动控制器连接并控制液压装置动作,液压装置设在车辆箱体底部并驱动箱体升降,压力传感器安装在车辆液压装置上探测液压油缸的举升压力,风力传感器和六轴传感器安装在箱体前部上端,风力传感器探测整车侧面的风速,六轴传感器探测箱体的加速度和前后左右倾角,阻尼器设在车辆箱体的前端底面,阻尼器修正箱体重心或者抑制箱体摆动防止倾翻。
进一步地,作为一种较优实施方式,控制系统切断手动控制器的控制器,并切换为控制系统自动控制液压装置。
进一步地,作为一种较优实施方式,控制系统还连接有屏幕,屏幕设在车辆的驾驶室内,并用于数据显示。
进一步地,作为一种较优实施方式,控制系统设在驾驶室内,手动控制器安装于液压装置侧边。
进一步地,作为一种较优实施方式,自卸车具有底盘,箱体的后端于底盘的后端转动连接,液压装置的底座设在底盘的中段,液压装置的驱动端与箱体的底部连接,驾驶室设在底盘的前端。
自卸车安全防护方法,其包括以下步骤:
步骤1,控制系统收集压力传感器、风力传感器、六轴传感器监测到的实时动态数据;
步骤2,工作人员基于动态数据判断当前环境是否适合自卸工作;是则,执行步骤3;否则,执行步骤1;
步骤3,控制系统允许工作人员通过手动控制器驱动液压装置举升箱体;
步骤4,控制系统获取并判断举升过程中六轴传感器、压力传感器和风力传感器探测的数据是否超过设定的临界值;是则,执行步骤5;否则,执行步骤6;
步骤5;控制系统根据具体情况进行相应的干预处理以箱体回位;
步骤6;等待自卸车完成卸货,控制系统驱动车辆回位结束动作。
进一步地,作为一种较优实施方式,步骤1中获取的实时动态数据显示在与控制系统连接的屏幕上。
进一步地,作为一种较优实施方式,步骤1中干预处理为:当箱体重心或者抑制箱体摆动超过设定临界值时,控制系统控制阻尼器工作以修正箱体重心或者抑制箱体摆动防止倾翻;
进一步地,作为一种较优实施方式,步骤1中干预处理为:控制系统切断手动控制器的控制器,并切换为控制系统自动控制液压装置动作使箱体回位。
本发明采用以上技术方案,可根据自卸车整车状态和工作环境状态自行分析当前是否适合自卸作业,也可在自卸过程中动态监测整车状态和工作环境状态,通过六轴传感器、压力传感器和风力传感器进行监测并通过阻尼器补偿防止倾翻,在相关监测参数达到临界值时自动切断手动模式,控制箱体回位。通过本系统可有效提高自卸车的安全性、可靠性和智能化,并且本系统可针对不同结构的自卸车设置不同的监测参数,具有很强的应用性。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明;
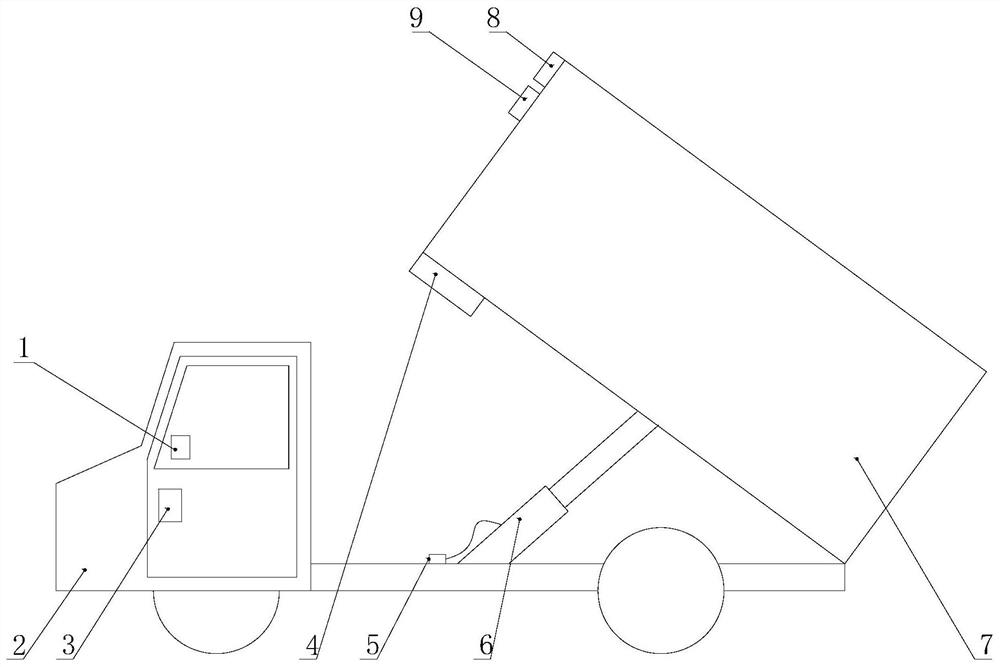
图1为依据本发明提出一套带六轴传感器、压力传感器、风力传感器、阻尼器以及控制器的自卸车安全系统的结构示意图;
图2为依据本发明提出一套带六轴传感器、压力传感器、风力传感器、阻尼器以及控制器的自卸车安全系统工作原理示意图;
图中各标识符号:序号1屏幕、序号2底盘、序号3控制系统、序号4阻尼器、序号5压力传感器、序号6液压系统、序号7箱体、序号8风力传感器、序号9六轴传感器。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图对本申请实施例中的技术方案进行清楚、完整地描述。
如图1或图2所示,本发明公开了自卸车安全防护系统,其包括控制系统以及与控制系统连接的六轴传感器、压力传感器、风力传感器、阻尼器和液压装置,手动控制器连接并控制液压装置,液压装置设在车辆箱体底部并驱动箱体升降,压力传感器安装在车辆液压装置上探测液压油缸的举升压力,风力传感器和六轴传感器安装在箱体前部上端,风力传感器探测整车侧面的风速,六轴传感器探测箱体的加速度和前后左右倾角,阻尼器设在车辆箱体的前端底面,阻尼器修正箱体重心或者抑制箱体摆动防止倾翻。
进一步地,作为一种较优实施方式,控制系统还连接有屏幕,屏幕设在车辆的驾驶室内,并用于数据显示。
进一步地,作为一种较优实施方式,控制系统设在驾驶室内,手动控制器安装于液压装置侧边。
进一步地,作为一种较优实施方式,自卸车具有底盘,箱体的后端于底盘的后端转动连接,液压装置的底座设在底盘的中段,液压装置的驱动端与箱体的底部连接,驾驶室设在底盘的前端。
自卸车安全防护方法,其包括以下步骤:
步骤1,控制系统收集压力传感器、风力传感器、六轴传感器监测到的实时动态数据;
步骤2,工作人员基于动态数据判断当前环境是否适合自卸工作;是则,执行步骤3;否则,执行步骤1;
步骤3,控制系统允许工作人员通过手动控制器驱动液压装置举升箱体;
步骤4,控制系统获取并判断举升过程中六轴传感器、压力传感器和风力传感器探测的数据是否超过设定的临界值;是则,执行步骤5;否则,执行步骤6;
步骤5;控制系统根据具体情况进行相应的干预处理以箱体回位;
步骤6;等待自卸车完成卸货,控制系统驱动车辆回位结束动作。
进一步地,作为一种较优实施方式,步骤1中获取的实时动态数据显示在与控制系统连接的屏幕上。
进一步地,作为一种较优实施方式,步骤1中干预处理为:当箱体重心或者抑制箱体摆动超过设定临界值时,控制系统控制阻尼器工作以修正箱体重心或者抑制箱体摆动防止倾翻;
进一步地,作为一种较优实施方式,步骤1中干预处理为:控制系统切断手动控制器的控制器,并切换为控制系统自动控制液压装置动作使箱体回位。
下面就本发明作具体的说明:
如图1所示,整套安全系统中序号1屏幕和序号3控制系统固定在序号2底盘的驾驶室内。序号5压力传感器安装在序号6液压系统上与序号9六轴传感器配合,监测油缸的举升压力,通过序号3控制系统计算箱体内货物的剩余重量。序号4阻尼器安装在序号7箱体前端底板下部,当序号7箱体在举升中通过序号9六轴传感器监测出重心偏移或箱体摆动,序号4阻尼器开始工作,修正箱体重心或者抑制箱体摆动。序号8风力传感器和序号9六轴传感器安装在序号7箱体前部上端,用于监测整车前后左右的倾角,序号7箱体举升的角度以及整车侧面的风速。
本安全系统在序号3控制系统收集到序号5压力传感器、序号8风力传感器、序号9六轴传感器收集到的实时动态数据后显示在序号1屏幕上,方便工作人员掌握整车实时状态。序号7箱体举升前,本系统会监测当前环境是否适合自卸工作,如不适合序号7箱体将无法举升。序号7箱体举升时,监测到的实时动态数据达到相关临界值时,序号3控制系统自动分析是否启动序号4阻尼器,或者确认是否切换为自动控制序号6液压系统使序号7箱体回位。
本发明采用以上技术方案,可根据自卸车整车状态和工作环境状态自行分析当前是否适合自卸作业,也可在自卸过程中动态监测整车状态和工作环境状态,通过六轴传感器、压力传感器和风力传感器进行监测并通过阻尼器补偿防止倾翻,在相关监测参数达到临界值时自动切断手动模式,控制箱体回位。通过本系统可有效提高自卸车的安全性、可靠性和智能化,并且本系统可针对不同结构的自卸车设置不同的监测参数,具有很强的应用性。
显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
- 自卸车安全防护系统及方法
- 自卸车的控制系统、自卸车及自卸车的控制方法