换能器设备、声纳模块及其控制方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及一种换能器设备、声纳模块及其控制方法,更具体地,涉及一种换能器设备、声纳模块和适用于具有至少两个换能器组件的自主设备的控制方法。
背景技术
传统上,声纳系统用于商业捕鱼,或者用于研究目的以检测鱼群、例如海洋捕鱼,但很少被业余爱好者使用。声纳系统通常以预定角度、预定频率发射声波。因此,它只能以一定的精度检测某一区域中鱼类的存在或运动。同时,水下设备的消费市场随着各种鱼饵而正在蓬勃发展。业余渔民可以使用鱼饵来吸引鱼,以增加捕鱼的机会。然而,业余垂钓仍然需要运气和经验,以便定位好的渔场。
发明内容
因此,本发明公开了一种换能器设备、声纳模块和适用于具有至少两个换能器组件的自主设备的控制方法,以解决上述缺点。
根据本发明的实施例,换能器设备包括第一换能器组件和第二换能器组件。该第一换能器组件用以沿指向方向、以第一指向角发射第一发射波。该第二换能器组件基本上与第一换能器组件同轴地布置。第二换能器组件用以沿该指向方向、以第二指向角发射第二发射波。第二指向角小于第一指向角,且第一换能器组件和第二换能器组件以不同的圆形形状制成。
根据本发明的另一个实施例,第一换能器组件是具有贯穿开口的环状结构,第二换能器组件是圆盘结构,并且圆盘结构设置在贯穿开口中。
根据本发明的另一个实施例,声纳模块包括声纳处理单元、声纳控制单元和换能器单元。该声纳处理单元用以决定操作模式并根据所述操作模式生成原始信号。声纳控制单元用以根据原始信号生成发射信号。换能器单元用以接收所述发射信号并根据所述发射信号传输发射波,所述换能器单元包括第一换能器组件和第二换能器组件,该第一换能器组件和该第二换能器组件具有部分重叠的覆盖区域。由所述声纳控制单元根据操作模式选择性地且独立地驱动所述第一换能器组件和所述第二换能器组件以传输所述发射波。
根据本发明的另一实施例,一种适用于具有至少两个换能器组件的自主设备的控制方法包括:对至少两个换能器组件的设定进行配置;根据设定分别从换能器组件传输发射波;根据设定由换能器组件分别接收反射波;处理反射波以生成对应于换能器组件的反射距离信息;根据反射距离信息判断待执行的操作;以及由自主设备执行该操作;其中,至少两个换能器组件是同轴地设置,并且在相同的指向方向上具有不同的指向角。
总之,本发明的自主设备可以利用与不同换能器组件相对应的反射距离信息来发现周围环境的变化,并根据用于不同目的的各种规则来判断适当的响应操作。与现有技术的系统相比,本发明实施例中的声纳模块的换能器单元至少包括第一换能器组件和第二换能器组件。第一换能器组件和第二换能器组件同轴地设置在基座上并且为圆形形状。第二换能器组件的第二指向角小于第一换能器组件的第一指向角,并且第二换能器组件在指向方向上的增益大于第一换能器组件在该指向方向上的增益。因此,第一换能器组件负责检测更大的区域,并且第二换能器组件负责以更大的增益检测位于该大区域的中心区域,用以对第一换能器组件检测的中心区域缺失进行补偿。
在阅读了以下对于在各个图和附图中所示出的优选实施例的详细说明之后,本发明的这些和其他目的对于本领域普通技术人员而言无疑将变得明显。
附图说明
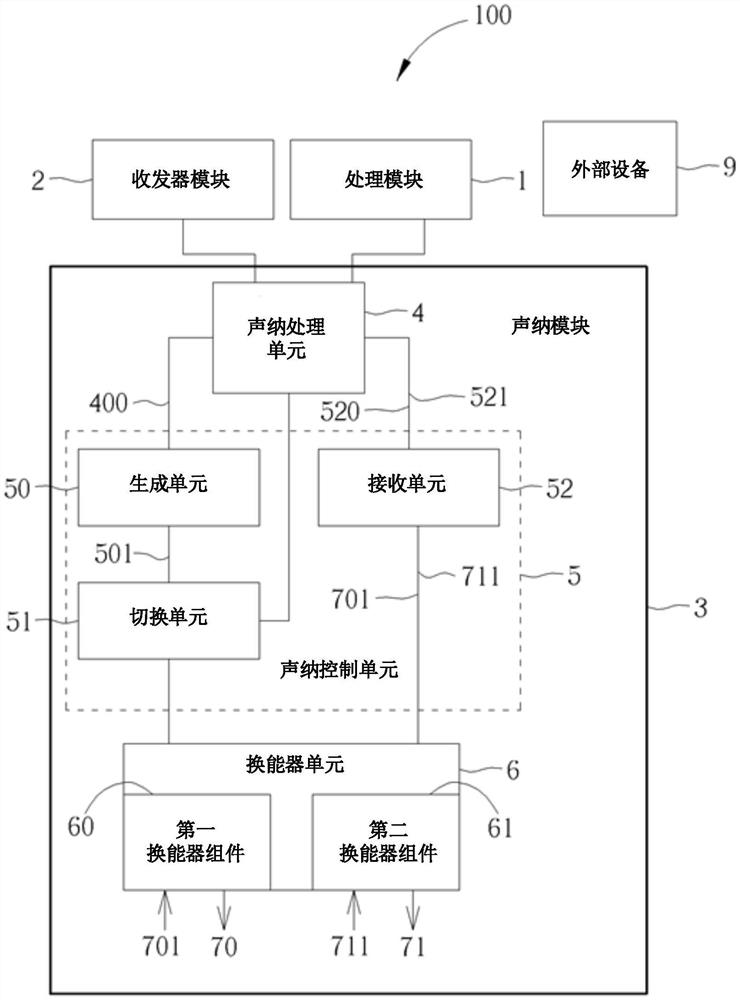
图1是根据本发明实施例的自主设备的功能框图。
图2是根据本发明实施例的换能器单元的示意图。
图3是根据本发明实施例的第一换能器组件的波场图。
图4是根据本发明实施例的第二换能器组件的波场图。
图5是根据本发明实施例的换能器单元的波场图。
图6例示了根据本发明实施例的适用于具有换能器组件的自主设备的控制方法的处理流程图。
图7是例示了根据本发明实施例的具有声纳模块的水下无人机的操作的示意图。
图8是例示了根据本发明实施例的具有多个换能器组件的自主设备的避障功能的示意图。
图9是例示了根据本发明另一实施例的具有多个换能器组件的自主设备的避障功能的示意图。
具体实施方式
在以下对实施例的详细描述中,可参考构成说明书一部分的附图,其中通过例示可以实施本发明的特定实施例的方式示出了其详细描述。在这方面,参考所描述的附图的方向使用诸如“顶部”、“底部”等方向术语。本发明的组件可以被定位在许多不同的方向上。因此,方向术语用于说明的目的而不是限制性的。另一方面,附图仅是示意性的,并且为了清楚起见,可放大组件的尺寸。应当理解,在不脱离本发明的范围的情况下,可以使用其他实施例并且可以做出结构性变化。此外,应该理解,这里使用的措辞和术语是为了说明的目的,而不应该被认为是限制性的。这里使用“包括”、“包含”或“具有”及其变型意在涵盖其后列出的条目及其等同物以及附加项。除非另有限制,否则在此术语“连接”、“安装”及其变型被广泛使用并且包括直接和间接的连接和安装。因此,附图和说明书将被视为本质上说明性的而非限制性的。
请参考图1。图1是根据本发明实施例的自主设备(autonomous device)100的功能框图。如图1所示,除了未绘示的其他模块之外,自主设备100包括处理模块1、收发器模块2和声纳模块3。处理模块1用以处理从自主设备100的其他模块接收的数据和/或信息,判断与处理结果相对应的操作,并向相关模块发送用于执行操作的指令等等。收发器单元2用以从外部设备9接收数据和/或命令以及向外部设备9传输数据和/或命令。收发器单元2可以以有线或无线通信的方式实现,例如USB、Wi-Fi、蓝牙、ZigBee和/或其他合适的协议。
声纳模块3包括声纳处理单元4、声纳控制单元5和换能器单元/换能器设备6。此外,声纳控制单元5包括生成单元50、开关单元51和接收单元52。生成单元50耦接至声纳处理单元4,且生成单元50经由切换(switch)单元51耦接到换能器单元6。接收单元52耦接至声纳处理单元4和换能器单元6。声纳处理单元4还耦接至处理模块1和收发器模块2。此外,声纳处理单元4可以,但不限于,耦接至切换单元51。
如图1所示,声纳处理单元4用以生成原始信号400。原始信号400被传输到声纳控制单元5的生成单元50。生成单元50用以将原始信号400处理为发射信号501。在本发明的实施例中,可以根据所选择的操作模式、系统配置或用户输入,生成不同频率和/或波形的原始信号400。可以根据换能器单元6的谐振特性来生成发射信号501,以便可以适当地致能换能器单元6来发射波。
换能器单元6包括第一换能器组件60和第二换能器组件61,其具有不同的谐振特性并且设置为不同的圆形形状。切换单元51根据发射信号501选择性地驱动第一换能器组件60和第二换能器组件61,以分别发射第一发射波70和第二发射波71。切换单元51可以从声纳处理单元4接收声纳模块所处的操作模式的指示,并根据操作模式将发射信号501提供给第一换能器组件60和第二换能器组件61。由于换能器组件60和61不同的谐振特性,第一发射波70和第二发射波71对应于相互重叠的不同覆盖区域。在本发明的实施例中,切换单元51将发射信号501独立地提供给第一换能器组件60和第二换能器组件61。在仅向第一换能器组件60提供发射信号501的情况下,仅从换能器单元6发射第一发射波70。在向第一换能器组件60和第二换能器组件61两者都提供发射信号501的情况下,从换能器单元6发射第一发射波70和第二发射波71两者。切换单元51可以根据预定规则或用户选择,将发射信号501提供给换能器单元6。
当第一发射波70和/或第二发射波71遇到外部物体(或外部障碍物)时,第一换能器组件60和第二换能器组件61也分别接收第一反射波701和第二反射波711。接收单元52接收第一反射波701和第二反射波711以做进一步处理,并相应地产生第一声纳信号520和第二声纳信号521。第一声纳信号520和第二声纳信号521被回传到声纳处理单元4进行进一步处理,以产生反射距离信息,该反射距离信息将在后面的描述中说明。
以此方式,声纳控制单元5驱动和/或致能换能器单元6以发射具有不同覆盖区域的第一发射波70和第二发射波71,并接收对应于第一换能器组件60和第二换能器组件61的第一反射波701和第二反射波711。应当注意,声纳处理单元4能够控制切换单元51,以便选择性地、独立地将发射信号501提供给第一换能器组件60和第二换能器组件61。因此,本发明的声纳模块3能够在多个操作模式下工作。在本发明的实施例中,声纳模块3具有两种操作模式。在第一操作模式中,向第一换能器组件60和第二换能器组件61两者都提供发射信号501,在第二操作模式中,仅选择性地向第一换能器组件60和第二换能器组件61之一提供发射信号501。本领域普通技术人员也可以理解,本发明的其他实施例可以用两种以上的操作模式实现,并且可以独立地选择第一换能器组件60和第二换能器组件61中的每一个。
请参考图2,其为根据本发明实施例的换能器单元62的图。在本发明的实施例中,第一换能器组件和第二换能器组件是压电陶瓷组件。如图2所示,换能器单元62包括第一压电陶瓷组件600、第二压电陶瓷组件610和基座A。第一压电陶瓷组件600和第二压电陶瓷组件610以不同的圆形形状制成,并围绕相同的中心点或轴设置。在本发明的实施例中,第一压电陶瓷组件600是具有贯穿开口601的圆环,第二压电陶瓷组件610是直径小于第一压电陶瓷组件600的贯穿开口601内径的圆盘。基座A适用于相对于第二压电陶瓷组件610来固定第一压电陶瓷组件600。此外,基座A具有外壁A0和内壁A1。在该实施例中,基座A是圆柱形结构,外壁A0和内壁A1分别是环形壁。另外,第一压电陶瓷组件600具有环形外周603和与环形外周603相对的环形内周602,环形内周602界定贯穿开口601。第二压电陶瓷组件610(即圆盘结构)具有盘形外周611。第二压电陶瓷组件610(即圆盘结构)设置在第一压电陶瓷组件600的贯穿开口601中,盘形外周611与第一压电陶瓷组件600的环形内周602间隔开,并且第二压电陶瓷组件610与第一压电陶瓷组件600基本同轴设置。
请参照图3和图4。图3是根据本发明实施例的第一换能器组件60的波场图。图4是根据本发明的实施例的第二换能器组件61的波场图。如图3和图4所示,第一换能器组件60能够发射具有图3所示波场图的超声波,即,第一换能器组件60适于沿指向方向D、以第一指向角A0发射第一发射波70(如图1所示)。第二换能器组件61能够发射具有图4中所示的波场图的超声波,即,第二换能器组件61适于沿相同的指向方向D、以第二指向角A1发射第二发射波71(如图1所示)。如前所述,由于第一换能器组件60和第二换能器组件61两者均为圆形形状并且具有相同的中心点或轴,因此波场的指向方向是相同的。然而,由于两个换能器组件的形状不同,指向角A0和A1是不同的,并且指向角A1被指向角A0覆盖。
如图3和图4所示,第二指向角A1小于第一指向角A0,并且第二发射波71在指向方向D上的增益G1大于第一发射波70在指向方向D上的增益G0。由于第一换能器组件60是具有贯穿开口601的环形结构,因此,由第一换能器组件60的贯穿开口601所在的中心区域所产生的增益G0小于由围绕环形结构(即,第一换能器组件60)的贯穿开口601的周围区域而产生的增益。
请参考图5。图5是根据本发明实施例的换能器单元6的波场图。如图3至图5所示,利用第一换能器组件60和第二换能器组件61的同轴设置,换能器单元6能够发射具有图5所示波场图的超声波,即,换能器单元6的波场图是图3所示第一换能器组件60的波场图与图4所示第二换能器组件61的波场图的叠加(integral)。因此,具有不同圆形形状的两个换能器组件的换能器单元6不仅具有由第一换能器组件60产生的较大检测区域,而且在由第二换能器组件61产生的较小检测区域内的中心区域处具有高灵敏度。藉此可改善第一换能器组件60在中心区域的灵敏度缺乏,并且有助于使大覆盖区域具有高灵敏度。
请参考图6,其绘示根据本发明实施例的适用于具有换能器组件的自主设备的控制方法的处理流程图。自主设备可以包括处理模块、收发器模块和声纳模块。自主设备可以以有线或无线方式与外部设备通信,以便传输声纳信息和/或接收用户指令。在本发明的实施例中,声纳模块包括对应于不同覆盖区域的至少两个换能器组件,并且换能器组件可以独立地配置用于波的发射和接收。
在步骤S100中,对换能器组件进行发射和传输设定的配置。该设定可以是默认配置、根据从外部设备接收的用户输入而配置,和/或根据特定规则来判定。例如,自主设备可以应用换能器组件的默认配置,并且在接收到用于禁能特定换能器组件的波发射或波接收的用户输入时,自主设备可以根据用户输入改变设定。因此,在步骤S200中,根据该设定从换能器组件传输发射波。由于换能器组件的不同特性,发射波的覆盖区域可以随着设定的配置而变化。在步骤300中,由配置为接收反射波的换能器组件接收反射波。在本发明的实施例中,所述至少两个换能器组件可以受独立配置以传输发射波并接收反射波。也就是说,换能器组件不需要同时用于波的发射和接收。换能器组件可用于接收反射波,但不用于传输发射波,反之亦然。
在步骤S400中,根据换能器组件接收到的反射波产生反射距离信息。反射波信息可以从与配置以接收反射波的换能器组件相关的覆盖区域而生成。在本发明的实施例中,可以通过分析对应于覆盖区域内特定位置的波的发射和接收的时间区间来生成反射距离信息。在步骤S500中,根据反射距离信息来判断自主设备要执行的操作。例如,在反射距离信息示意在自主设备所移动方向的前面可能存在大障碍物的情况下,可以判定应该执行暂停操作以避免与障碍物碰撞。在又一实施例中,如果反射距离信息示意在自主设备下面可能存在小的移动物体,则可以判定应当启用相机模块(未绘示)以捕获下方物体的图像,并且将其传输到外部设备。所述操作可以预先判定,和/或根据从外部设备接收到的用户输入来判断。在本发明的其他实施例中,可以通过将反射距离信息提供给外部设备的用户接口的步骤,以及从外部设备的用户输入接收与操作相对应的用户输入的另一步骤来执行操作的判断。在步骤600中,由自主设备执行所述操作。如前所述,操作可以是由自主设备的相机模块执行的图像捕获操作,或者由自主设备的引擎或电机模块执行的暂停操作。本领域普通技术人员可以理解,操作不限于自主设备的图像捕获或移动控制,可以参考反射距离信息执行的任何操作都落入本发明的公开内容的范围内。
请参照图7,其绘示根据本发明实施例的具有声纳模块6000的水下无人机1000的操作的图。在图7的实施例中,自主设备是水下无人机1000,且水下无人机1000的声纳模块6000包括第一换能器组件和第二换能器组件,第一换能器组件和第二换能器组件围绕相同的轴线设置,并且以一个包围另一个的方式覆盖不同的搜索区域。水下无人机1000能够与外部设备900通信,并且用户可以利用外部设备来控制水下无人机1000的移动和操作。在图7的实施例中,外部设备900是智能手机。当水下无人机1000正在进行水下探鱼时,用户可以利用外部设备900来选择声纳模块6000的操作模式。例如,用户可以选择第一模式E,在第一模式E中,水下无人机1000的两个换能器组件被用于发射波以及接收反射波。
在第一模式E中,声纳模块6000的换能器组件以第一指向角A10发射第一发射波,以第二指向角A11发射第二发射波。在本发明的实施例中,第一指向角A10大于第二指向角A11。还可以观察到,对应于第一指向角A10的第一覆盖区域大于对应于第二指向角A11的第二覆盖区域。由于换能器组件的同轴设置,第一覆盖区域包围第二覆盖区域。因此,以第一模式E工作的水下无人机1000能够执行用于探鱼目的的大面积检测。如图7的实施例中所示,可以至少在对应于第二换能器组件的覆盖区域中检测到物体C(即鱼),并且可以在对应于第一换能器组件的覆盖区域中检测到另一物体B(即另外的鱼)。此外,响应于物体B和C的检测,水下无人机1000可以执行图像捕获操作,并且传输捕获的图像以显示在外部设备900上。
请注意,在本发明的实施例中,两个换能器组件接收的反射波都会提供给声纳处理单元以进行进一步处理。然而,在本发明的其他实施例中,可以仅将换能器组件之一(例如,具有较大覆盖区域的换能器组件)接收的反射波提供给声纳处理单元。还请注意,在图7的实施例中,因为第一换能器组件的覆盖区域包围第二换能器组件的覆盖区域,因此在第一换能器组件的覆盖区域和第二换能器组件的覆盖区域两者中都可以检测物体C。
响应于用户选择第二模式F(在第二模式中仅向换能器组件之一提供发射信号),水下无人机1000在与所选择的换能器组件对应的覆盖区域内执行探鱼。在本发明的实施例中,是选择具有较小覆盖区域的第二换能器组件。因此,在第二模式E下水下无人机1000发射第二发射波,并且水下无人机1000将检测到鱼C,但是不会检测到鱼B。请注意,在本发明的实施例中,仅将第二换能器组件接收的反射波提供给声纳处理单元,然而在本发明的其他实施例中,也可以将第一换能器组件接收的反射波提供给声纳处理单元。
尽管图7的实施例只公开了两种操作模式,但是本领域普通技术人员可以认识到在本发明的实施例中可以实现两种或更多种操作模式。并且换能器组件可以独立地用于发射波或接收波,特别是换能器组件不需要在单一模式中既发射波也接收波。然而,在本发明的其他实施例中,用户可以通过外部设备900上提供的用户接口来配置操作模式的设定。用户可以例如添加或删除操作模式,改变特定操作模式下特定换能器组件的波发射或波接收。
在本发明的实施例中,除了探鱼之外,声纳模块的换能器组件还可以用于的其他目的。如上所述,换能器组件对应于不同的覆盖区域,并且可以独立地用于波发射和波接收。声纳处理单元可以处理与换能器组件对应的反射波,以产生与换能器组件的覆盖区域对应的反射距离信息。并且处理模块可以根据反射距离信息执行各种操作。在本发明的实施例中,处理模块可以根据反射距离信息判断自主设备的移动方向和/或暂停(suspension)。处理模块可以从声纳处理单元接收反射距离信息,根据反射距离信息判断操作,并将对应于该操作的指令发送给负责执行操作的模块。
例如,参考图8,其绘示出根据本发明实施例的具有多个换能器组件的自主设备2000的避障功能示意图。如图8所示,自主设备2000在自由空间中导航,并且换能器组件以指向角A20发射第一发射波,以指向角A21发射第二发射波。同时,障碍物O在自主设备2000的前方某一距离处,其中障碍物O是面向自主设备2000的大物体,其表面基本上是平坦的。第一发射波和第二发射波被障碍物O反射,使得产生对应于第一障碍物O1的第一反射距离信息,并且产生对应于第二障碍物O2的第二反射距离信息,其中第一障碍物O1是障碍物O1的基本平坦表面的一部分,且第二障碍物O2是障碍物O的基本平坦表面的另一部分。
由于第一障碍物O1和第二障碍物O2实际上在同一平面上,所以第一反射距离信息和第二反射距离信息可示意第一障碍物O1和第二障碍物O2到自主设备1000间具有相同水平距离。因此,自主设备2000的处理模块控制发动机或电动机模块以使自主设备2000相对于平面障碍物向后移动,或驱动自主设备2000绕过平面障碍物,以执行避障功能。
图9是根据本发明另一实施例具有多个换能器组件的自主设备3000的避障功能的示意图。如图9所示,自主设备3000在另一个自由空间中导航,并且自主设备3000的换能器组件在对应于指向角A30和A31的覆盖区域中发射波和接收波。基于换能器组件接收到的反射距离信息的差异,自主设备3000可以判断是否有足够空间供自主设备3000通过。自主设备3000可以根据反射距离信息和指向角推导出通道宽度L,然后将通道宽度L与其自身的宽度La进行比较以判断接下来的移动操作。如果通道宽度L足够大到能让自主设备3000安全通过,则自主设备3000可以继续向前移动。如果通道宽度L不够大,则自主设备3000可以向上或向下移动以找到其他路径通过、暂停移动或进行指定的其他操作。
总之,本发明的自主设备可以利用对应于不同换能器组件的反射距离信息来发现周围环境的变化,并根据用于不同目的的各种规则来判断适当的响应操作。与现有技术的系统相比,本发明实施例中的声纳模块的换能器单元至少包括第一换能器组件和第二换能器组件。第一换能器组件和第二换能器组件同轴地设置在基座上,并且呈圆形形状。第二换能器组件的第二指向角小于第一换能器组件的第一指向角,并且第二换能器组件在指向方向上的增益大于第一换能器组件在该指向方向上的增益。因此,第一换能器组件负责检测较大的区域,并且第二换能器组件负责以较大的增益检测位于该大区域中心的区域,用于对第一换能器组件检测的中心区域的缺失进行补偿。
本领域技术人员将轻易地观察到,可以在保留本发明的教导的同时对设备和方法进行多种修改和更改。因此,上述公开内容应被解释为仅受所附权利要求的范围和界限的限制。
- 换能器设备、声纳模块及其控制方法
- 具有换能器模块的听力设备和用于制造换能器模块的方法