一种夏季飑线风自动识别和预警方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及气象预报技术领域,更具体地,涉及一种夏季飑线风自动识别和预警方法。
背景技术
飑线是产生灾害性大风的重要原因之一,生命史短,但突发性和破坏性强,常对工农业生产、交通运输和人民生活造成极大危害。
现有技术中,中国专利申请(CN106199606A)提出“一种基于雷达回波三维拼图的多阈值飑线识别方法”,利用风暴单体识别追踪算法对雷达回波强度三维拼图数据进行风暴单体自动识别,设定飑线识别所需参数的多组阈值形成多组参数方案进行飑线识别,若多组识别结果对应的线性得分有一个或多个高于设定分值,则将线性得分最高的识别结果作为飑线识别结果。以该专利申请为代表的现有技术,提高了飑线识别的准确率,为飑线大风预报提供了可靠的预警机制;但是该技术中,多参数方案中的各组阈值是人为固定设置的,虽然能够反映出飑线系统从弱到强再到弱的发展阶段,但是无法根据当前体扫回波的参数值进行阈值的实时调整,因此对于飑线系统的强、弱态势跟随程度较低,会出现飑线预警等级的误判;此外,对于多个线风暴组成的飑线,在线性程度上相差不大,需要延续同一组参数进行识别,以便于飑线分裂合并具有连续性,因此对于设置的阈值需要进行实时调整和优化。
发明内容
为解决现有技术中存在的不足,本发明的目的在于,提供一种夏季飑线风自动识别和预警方法,实现飑线多阈值的实时调整,提供识别系统对飑线系统的强、弱态势的跟随程度,避免出现飑线预警等级的误判。
本发明采用如下的技术方案。
一种夏季飑线风自动识别和预警方法的步骤如下:
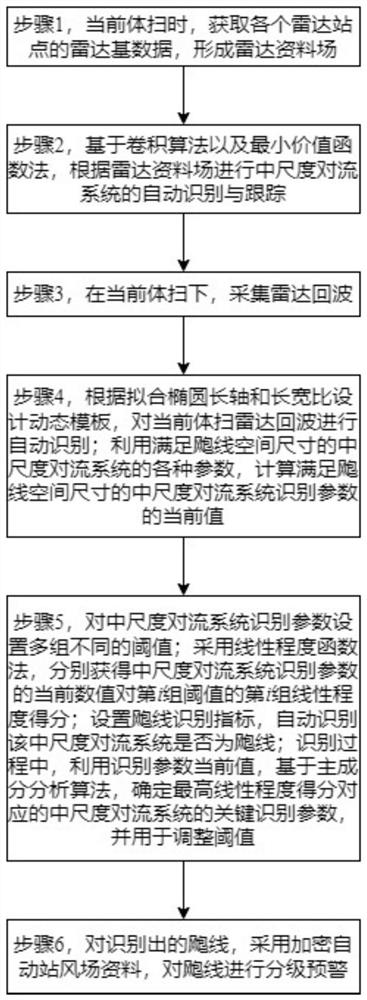
步骤1,当前体扫时,获取各个雷达站点的雷达基数据,形成雷达资料场;
步骤2,基于卷积算法以及最小价值函数法,根据雷达资料场进行中尺度对流系统的自动识别与跟踪;
步骤3,在当前体扫下,采集雷达回波;
步骤4,根据拟合椭圆长轴和长宽比设计动态模板,对当前体扫雷达回波进行自动识别;利用满足飑线空间尺寸的中尺度对流系统的各种参数,计算满足飑线空间尺寸的中尺度对流系统识别参数的当前值;
步骤5,对中尺度对流系统识别参数设置多组不同的阈值;采用线性程度函数法,分别获得中尺度对流系统识别参数的当前数值对第i组阈值的第i组线性程度得分V
步骤6,对识别出的飑线,采用加密自动站风场资料,对飑线进行分级预警。
优选地,步骤2包括:
步骤2.1,基于卷积算法,对雷达资料场进行平滑处理;
步骤2.2,在得到的卷积资料场中,识别层云和对流云,并将落在同一层云范围之内的对流云归为一个对流系统,
步骤2.3,识别并记录对流系统的长轴、持续时间以及长宽比;从所记录的参数中筛选出中尺度对流系统;
步骤2.4,采用最小价值函数法匹配所识别出的中尺度对流系统,在排除错误匹配后,实现跟踪。
步骤2.1中,基于卷积算法,雷达资料场的平滑处理,是在组合反射率因子上进行卷积,满足如下关系式:
C(x,y)=∑φ(u,v)f(x-u)(y-v)
式中,
f表示雷达资料场,
φ表示一个由高度H和影响半径R决定的圆形滤波函数,其中,H表示被识别的对流系统的高度,R表示被识别的对流相同的影响半径,
(u,v)表示第一变量,其中u和v均为该变量的格点坐标,
(x,y)表示第二变量,其中x和y均为该变量的格点坐标。
圆形滤波函数满足如下关系式:
其中,
参数R和H不相互独立,满足如下关系式:
πR
卷积过程中,影响半径R是唯一可改变的参数。
优选地,步骤4包括:
步骤4.1,用椭圆拟合中尺度对流系统,并得到拟合椭圆长轴及所在直线;
步骤4.2,通过中尺度对流系统内对流云点,与拟合椭圆长轴所在直线垂直的最远两直线之间的距离,作为中尺度对流系统的长轴L;
步骤4.3,设置拟合椭圆长宽比限值,设计动态模板;
步骤4.4,在动态模板范围内,拟合中尺度对流系统内对流云点的得分函数模型;利用得分函数模型计算中尺度对流系统内全部对流云点的得分值;
步骤4.5,计算中尺度对流系统内全部对流云点得分值的累加结果与该系统内对流云面积的比值,若该比值持续超过2小时大于限值,则判定当前体扫的中尺度对流系统满足飑线空间尺寸;
步骤4.6,输出满足飑线空间尺寸的中尺度对流系统的各种参数,包括各时刻的得分值、面积、长轴方向、长轴长度、中心位置、移动速度和移动方向;
步骤4.7,根据步骤4.6中输出的各种参数,计算并输出中尺度对流系统识别参数的当前值。
步骤4.5中,对流云面积是系统内所有对流云格点的累加结果,其中每个对流云格点的面积为1km
步骤4.7中,中尺度对流系统的识别参数包括:层云反射率因子、对流云反射率因子、低阶分量面积、高阶分量面积、系统总面积和系统长度。
优选地,步骤5包括:
步骤5.1,根据体扫回波强、弱情况,对中尺度对流系统识别参数设置多组不同的阈值;定义阈值分组编号为i;
步骤5.2,采用线性程度函数法,分别获得中尺度对流系统识别参数的当前数值对第i组阈值的第i组线性程度得分V
步骤5.3,设置飑线识别指标,当各组线性程度得分均小于飑线识别指标时,则识别结果是无飑线,并返回步骤5.2,对下一体扫得到的中尺度对流系统的回波进行识别;当任一组线性程度得分大于飑线识别指标时,则提取最高线性程度得分对应的中尺度对流系统识别参数的当前值,并进入步骤5.4;
步骤5.4,基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数,比较该关键识别参数的当前值与对应阈值的大小关系,若该当前值均大于各组对应阈值,则确定最高线性程度得分对应的中尺度对流系统为飑线,并返回步骤5.2,对下一体扫回波进行识别;若该当前值小于任一组对应阈值,则返回步骤5.1调整该关键识别参数的所对应的各组阈值。
基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数,包括:
步骤5.4.1,以最高线性程度得分对应的中尺度对流系统识别参数为样本X,该样本中包含p个指标变量,即各识别参数的当前值{x
步骤5.4.2,利用p个指标变量构建关键识别参数的综合变量Z
Z
式中,l
关键识别参数的综合变量Z
步骤5.4.3,计算关键识别参数的综合变量Z
基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数包括层云反射率因子和对流云反射率因子。
本发明的有益效果在于,与现有技术相比,提高飑线风的预报预警准确率、自动化水平和预报提前量,提高电网生产防灾减灾能力和应急抢修效率,最大限度降低飑线风对电网及电网设备造成的损失。
附图说明
图1为本发明一种夏季飑线风自动识别和预警方法的流程图;
图2为本发明一种夏季飑线风自动识别和预警方法中,动态模板的示意图;
图3为本发明一种夏季飑线风自动识别和预警方法中,得分函数的示意图;
图4为本发明一种夏季飑线风自动识别和预警方法中,飑线最大反射率因子和系统长度随时间变化的曲线图。
具体实施方式
下面结合附图对本申请作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本申请的保护范围。
实施例1。
本优选实施例中,根据表1所示的多个在雷达资料上对飑线的定义,并根据我国飑线实际情况,认为满足以下两个条件为飑线:
(1)由层云(15dBZ)连接的对流云(40dBZ)组成的系统长轴大于100km,持续时间超过4h;
(2)系统长宽比大于5∶1,持续时间超过2h。
如图1,一种夏季飑线风自动识别和预警方法的步骤如下:
步骤1,当前体扫时,获取各个雷达站点的雷达基数据,形成雷达资料场。
步骤2,基于卷积算法以及最小价值函数法,根据雷达资料场进行中尺度对流系统的自动识别与跟踪。
具体地,步骤2包括:
步骤2.1,基于卷积算法,对雷达资料场进行平滑处理;
步骤2.2,在得到的卷积资料场中,识别层云和对流云,并将落在同一层云范围之内的对流云归为一个对流系统,
步骤2.3,识别并记录对流系统的长轴、持续时间以及长宽比;从所记录的参数中筛选出中尺度对流系统;
步骤2.4,采用最小价值函数法匹配所识别出的中尺度对流系统,在排除错误匹配后,实现跟踪。
步骤2.1中,基于卷积算法,雷达资料场的平滑处理,是在组合反射率因子上进行卷积,满足如下关系式:
C(x,y)=∑φ(u,v)f(x-u)(y-v)
式中,
f表示雷达资料场,
φ表示一个由高度H和影响半径R决定的圆形滤波函数,其中,H表示被识别的对流系统的高度,R表示被识别的对流相同的影响半径,
(u,v)表示第一变量,其中u和v均为该变量的格点坐标,
(x,y)表示第二变量,其中x和y均为该变量的格点坐标。
圆形滤波函数满足如下关系式:
其中,
参数R和H不相互独立,满足如下关系式:
πR
卷积过程中,影响半径R是唯一可改变的参数。一旦R被选定,H由上式决定。本优选实施例中采用的是4个格距。
在得到的卷积场中,识别出层云(15dBZ)和对流云(40dBZ),将落在同一个层云范围内的对流云归为一个系统,这样的系统满足长轴大于100km,持续时间超过4h,则被认为是中尺度对流系统。在识别的过程中,相关参数被记录下来。
步骤3,在当前体扫下,采集雷达回波。
步骤4,根据拟合椭圆长轴和长宽比设计动态模板,对当前体扫雷达回波进行自动识别;利用满足飑线空间尺寸的中尺度对流系统的各种参数,计算满足飑线空间尺寸的中尺度对流系统识别参数的当前值。
具体地,步骤4包括:
步骤4.1,用椭圆拟合中尺度对流系统,并得到拟合椭圆长轴及所在直线;
步骤4.2,通过中尺度对流系统内对流云点,与拟合椭圆长轴所在直线垂直的最远两直线之间的距离,作为中尺度对流系统的长轴L;
步骤4.3,设置拟合椭圆长宽比限值,设计动态模板;
步骤4.4,在动态模板范围内,拟合中尺度对流系统内对流云点的得分函数模型;利用得分函数模型计算中尺度对流系统内全部对流云点的得分值;
步骤4.5,计算中尺度对流系统内全部对流云点得分值的累加结果与该系统内对流云面积的比值,若该比值持续超过2小时大于限值,则判定当前体扫的中尺度对流系统满足飑线空间尺寸;
步骤4.6,输出满足飑线空间尺寸的中尺度对流系统的各种参数,包括各时刻的得分值、面积、长轴方向、长轴长度、中心位置、移动速度和移动方向;
步骤4.7,根据步骤4.6中输出的各种参数,计算并输出中尺度对流系统识别参数的当前值。
具体地,
步骤4.5中,对流云面积是系统内所有对流云格点的累加结果,其中每个对流云格点的面积为1km
步骤4.7中,中尺度对流系统的识别参数包括:层云反射率因子、对流云反射率因子、低阶分量面积、高阶分量面积、系统总面积和系统长度。
本优选实施例中,中尺度对流系统一般为不规则多边形,形状复杂,先勾勒出中尺度对流系统的多边形,然后再用椭圆去拟合这个多边形,根据拟合椭圆得到拟合椭圆长轴及所在直线。过中尺度对流系统内部对流云点,与拟合椭圆长轴所在直线垂直最远两直线间的距离,作为中尺度对流系统的长轴L。根据对飑线的定义中,其中一个条件是长宽比大于5∶1,如果这个中尺度对流系统是飑线,则它的宽最大应为长轴的1/5,根据长与宽得到动态模板,如图2所示,椭圆代表自动识别得到的中尺度对流系统,虚线所组成的图形代表动态模板,中尺度对流系统长轴L为动态模板长轴,宽满足W=L/5。不同中尺度对流系统计算得到不同L和W。
图3中得分函数的横坐标为中尺度对流系统内部对流云回波点到拟合椭圆长轴的几何距离,纵坐标为得分值。若中尺度对流系统长轴直线为ax+by+c=0,点的坐标为(x
式中,
a、b、c分别表示中尺度对流系统长轴直线表达式的拟合系数。
如图3,当对流云回波点到长轴的几何距离小于W/2*2/3时,对流云距离长轴较近,给回波点一个较高的得分值2.0,当距离在超过W/2*2/3,小于W/2时,得分值有一个缓慢下降的过程,当距离超过W/2,即在长宽比为5:1的长方形范围之外,得分值随距离增加迅速下降至-2.0。
在识别过程中,每一个满足飑线空间尺寸条件的中尺度对流系统,使其内部对流云都经过以上计算,累加所有对流云回波点的得分值,比上系统内部对流云面积,即系统内所有对流云格点的累加结果,得到一个最终的得分值结果,该最终得分值在-2.0到2.0之间,如果最终得分值持续超过2h大于1.2,则认为其满足飑线定义第二个条件。满足飑线定义的两个条件,则识别为飑线。
步骤5,对中尺度对流系统识别参数设置多组不同的阈值;采用线性程度函数法,分别获得中尺度对流系统识别参数的当前数值对第i组阈值的第i组线性程度得分V
具体地,步骤5包括:
步骤5.1,根据体扫回波强、弱情况,对中尺度对流系统识别参数设置多组不同的阈值;定义阈值分组编号为i;
步骤5.2,采用线性程度函数法,分别获得中尺度对流系统识别参数的当前数值对第i组阈值的第i组线性程度得分V
步骤5.3,设置飑线识别指标,当各组线性程度得分均小于飑线识别指标时,则识别结果是无飑线,并返回步骤5.2,对下一体扫得到的中尺度对流系统的回波进行识别;当任一组线性程度得分大于飑线识别指标时,则提取最高线性程度得分对应的中尺度对流系统识别参数的当前值,并进入步骤5.4;
步骤5.4,基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数,比较该关键识别参数的当前值与对应阈值的大小关系,若该当前值均大于各组对应阈值,则确定最高线性程度得分对应的中尺度对流系统为飑线,并返回步骤5.2,对下一体扫回波进行识别;若该当前值小于任一组对应阈值,则返回步骤5.1调整该关键识别参数的所对应的各组阈值。
基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数,包括:
步骤5.4.1,以最高线性程度得分对应的中尺度对流系统识别参数为样本X,该样本中包含p个指标变量,即各识别参数的当前值{x
步骤5.4.2,利用p个指标变量构建关键识别参数的综合变量Z
Z
式中,l
关键识别参数的综合变量Z
步骤5.4.3,计算关键识别参数的综合变量Z
具体地,基于主成分分析算法,确定最高线性程度得分对应的中尺度对流系统的关键识别参数包括层云反射率因子和对流云反射率因子。
飑线在不同发展阶段对应的回波强度不同,一般会经历由弱到强再减弱的发展过程,即飑线在生成初期和减弱消亡阶段对应的回波强度相对较弱,成熟阶段对应的回波达到最强。另外,不同地区、不同季节甚至不同天气过程对应的飑线强度也相差很大。因此要想很好地识别飑线,很有必要将固定参数修改为可调参数,即根据飑线回波强、弱动态选配合适的识别参数,或者说在飑线不同发展阶段采用识别参数未必完全相同。本优选实施例中,设置了4组不同的阈值,对识别参数进行循环计算和择优选择,阈值详见表1。
表1中尺度对流系统识别参数的4组阈值
从表1可以看出,方案1设置的对流云反射率因子阈值最低,为35dBz,但系统长度阈值和面积阈值均最大,适合弱飑线或飑线的生成、减弱阶段;方案2到方案4中,设置的反射率因子按照5dBz依次递增,但要求系统长度阈值和面积阈值均降低。
对同一体扫的4组识别结果择优选取,择优标准主要依靠系统线性程度得分,当4组方案中系统线性程度全部低于0.8时,识别结果无飑线。
从表1还可以看出,该同一体扫的4组识别结果中线性程度得分均为0.8,初步设别为飑线。基于主成分分析算法,确定关键识别参数为层云反射率因子和对流云反射率因子,因此进一步判断系统是否包含最大反射率因子区域,即线性程度最高的系统的最大反射率因子低于其它方案里的对应阈值时,要适当降低阈值。
阈值的优化结果详见表2。
表1中尺度对流系统识别参数的4组阈值
对多个线风暴组成的飑线,在线性程度相差不大时延续同一组参数识别,便于飑线分裂合并具有连续性。此外,一个体扫中可能识别到1个或多个飑线,也有可能识别不到。
步骤6,对识别出的飑线,采用加密自动站风场资料,对飑线进行分级预警。
地面风资料采用加密自动站风场资料和大风灾害报告,其中,加密自动站风场资料包括但不限于瞬时风向和风速、时间分辨率5min,大风灾害报告主要提供超过17m/s的瞬时极大风速;加密自动站包括国家级测站和区域级测站。
风场包括三个级别:
①大风测站:7级以上大风,瞬时极大风速≥17m/s或瞬时风速≥13.9m/s。
②强风测站:5-6级大风,瞬时风速8~13.9m/s。
③所有风测站:为说明加密自动站分布密度,叠加在底图显示,而前两类测站的风向和风速用风向杆表示。
实施例2。
应用设置4组不同阈值的方案,对5月6日12:00~18:00雷达组网拼图资料进行飑线识别,对同一个体扫不同参数方案识别效果进行对比分析。
对于12:54的飑线系统,前3组方案均能成功识别到飑线,对应的系统线性程度高于0.8。从识别区域看,最大长轴长度分别为320km、266km和122km,系统面积分别为12284km
对于13:30的飑线系统,4组方案均识别到的线状飑线,系统对应的最大反射率因子均为72dBz,长轴分别为412km、284km、198km和175km,面积为13108km
对于15:30的飑线系统,前3组方案识别到线状飑线,方案1识别得到飑线的线性程度仅为0.35,不满足飑线条件。方案2和方案3识别到飑线的最大反射率因子均为65dBz,最大长轴分别为229km和205km,其中方案3的线性程度最高为1.45,且强回波更为集中,可选定为最优识别结果。
通过分析表3所示的12:00~18:00四组方案识别结果,可明显看出,用不同参数识别得到的线状飑线和飑线的体扫个数明显不同。方案1识别得到60个体扫的线状飑线(12:00~17:54),持续时间最长5小时54分,其中满足飑线有28个体扫,线性程度高于1的飑线集中在飑线生成和发展阶段。方案2识别到56个体扫线状飑线,识别时间段12:06~17:30,其中飑线占39个体扫,也是参数方案中识别最多的;方案3识别到42个体扫线状飑线,飑线占23个体扫;方案四识别到7个体扫,其中3个为飑线,主要位于飑线发展的最强时段。
表3 12:00~18:00四组方案识别结果
从表3可以看出,采用优化识别方法,通过对过程每一个体扫的优化识别,筛选共得到48个体扫的飑线,期间最大反射率因子持续高于55dBz,最强达74dBz。与每一组固定参数方案识别相比,优化识别方法得到飑线体扫数都有增加。相比优化识别飑线结果,4组方案识别飑线命中率分别为58.3%、81.3%、47.9%和6.3%,其中方案2识别命中率最高,但仍有5个体扫弱飑线和4个体扫强飑线没被识别到。
分析4组方案的线性程度情况,可以看出:方案4线性程度最高值仅出现在13:30飑线较强时,方案3在飑线的成熟阶段(13:06-13:36、14:48-16:00)时线性程度最高,方案2是方案中识别最多的识别时间段12:06~17:30,方案1出现在飑线生成初期和消亡时期。飑线优化识别选取参数的先后顺序依次为:方案1→方案2→方案3→方案4→方案3→方案2→方案1→方案2→方案3→方案2→方案1,如图4所示,与飑线的发展演变趋势为先加强后减弱再加强再减弱的顺序刚好吻合,其中13-14时对应最大反射率因子超过65dBz,13:54最大达74dBz。
四种不同阈值的方案用于识别不同强度或不同发展阶段的飑线,优化识别方法可以选择四组固定参数中最优识别结果,能根据回波强度自动挑选最优参数识别方案,还能真实反应飑线的不同发展阶段,使得识别飑线范围和线性程度均达到最佳。
本发明的有益效果在于,与现有技术相比,提高飑线风的预报预警准确率、自动化水平和预报提前量,提高电网生产防灾减灾能力和应急抢修效率,最大限度降低飑线风对电网及电网设备造成的损失。
本发明申请人结合说明书附图对本发明的实施示例做了详细的说明与描述,但是本领域技术人员应该理解,以上实施示例仅为本发明的优选实施方案,详尽的说明只是为了帮助读者更好地理解本发明精神,而并非对本发明保护范围的限制,相反,任何基于本发明的发明精神所作的任何改进或修饰都应当落在本发明的保护范围之内。
- 一种夏季飑线风自动识别和预警方法
- 一种输电线路飑线风预警方法