全自动机器人激光打码设备
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及自动化机械技术领域,尤其涉及全自动机器人激光打码设备。
背景技术
现有技术中工艺喷墨打码的方式由于需要与产品接触、成本高、标记容易,对环境不友好等缺点逐渐被激光打码技术取代,激光打码技术具有的非接触式无损打标、对环境友好、加工精度高、标记具有持久性不会被轻易抹除、使用寿命长和加工效率快等优点逐步占领打码领域。
本申请人有见于上述习知机器人激光打码的不足,秉持研究创新、精益求精的精神,结合生产实践,利用专业科学的方法,提出一个实用的解决方案,因此提出本案申请。
发明内容
本发明的目的在于针对已有的技术现状,提供全自动机器人激光打码设备。
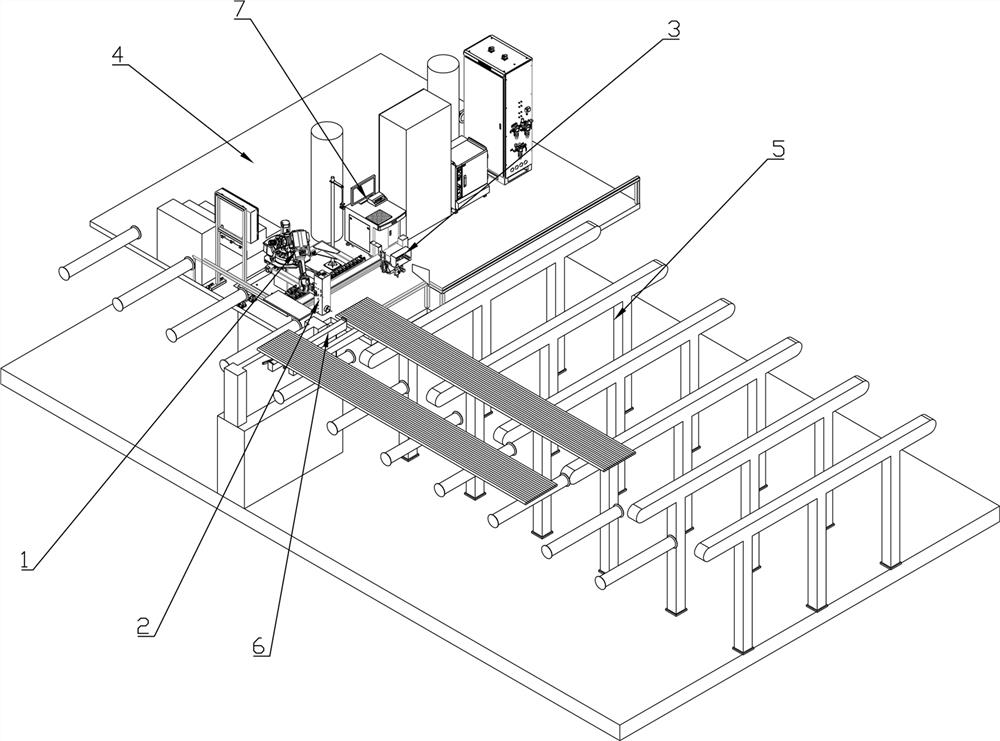
全自动机器人激光打码设备,机械手、激光喷头、扫描喷漆组件和工作机架,工作机架一侧设有进料导辊组,所述的机械手设置在工作机架的设备安装工作面上,设备安装工作面前端设有横向输送装置,激光喷头安装在机械手上且位于横向输送装置的前方,进料导辊组位于机械手一侧,机械手另一侧设有扫描喷漆组件,设备安装工作面上的控制终端信号连接于机械手、激光喷头和扫描喷漆组件。
具体的,所述的机械手主要由固定座、移动部和安装部组成,激光喷头固定在安装部的前端,安装部通过移动部设置在固定座上,机械手带动激光喷头位移至横向输送装置上的钢管,并使其激光喷头对准钢管一侧面。
具体的,所述的移动部分为旋转底座、第一摆臂、第二摆臂和第三摆臂,第一摆臂底部安装在旋转底座,第一摆臂顶部通过转轴连接于第二摆臂一端,第二摆臂另一端通过转轴连接于第三摆臂,激光喷头安装在第三摆臂上的前端。
具体的,所述的旋转底座带动第一摆臂转动,第一驱动电机设置在第一摆臂与旋转底座连接处且带动第一摆臂以转轴为轴心摆动,第二驱动电机设置在第一摆臂与第二摆臂连接处且带动第二摆臂以转轴为轴心摆动。
具体的,所述的扫描喷漆组件主要由调节底座、扫描摄像头、喷涂头和喷料储存筒组成,扫描摄像头和喷涂头安装在调节底座上,扫描摄像头位于喷涂头一侧,喷料储存筒通过管道连接于喷涂头。
具体的,所述的进料导辊组下方设有搬运组件,搬运组件将一整组钢管搬运至横向输送装置上,横向输送装置带动一整组钢管依次经过激光喷头和扫描喷漆组件。
具体的,所述的进料导辊组设置驱动电机且通过驱动电机带动进料导辊转动,搬运组件底部通过驱动装置做线性往返运动,搬运组件中间向下凹陷形成一限位卡件。
本发明的有益效果为:利用进料导辊组和横向输送装置来搬运钢管 ,在搬运的过程中,由激光喷头和扫描喷漆组件对钢管一侧面进行加工,在钢管上进行标码和喷漆、扫描记录,激光雕刻标识稳定不易脱落,扫描记录可实现对钢管的逐支跟踪,该设计提高设备的精准度和自动化程度,从而减少制作商的人力物力,提高设备的生产效率和产品质量。
附图说明
附图1为本发明的结构示意图;
附图2为本发明的立体图;
附图3为本发明的侧视图。
标注说明:机械手1、激光喷头2、扫描喷漆组件3、工作机架4、横向输送装置5、搬运组件6和控制器7;固定座11、移动部12和安装部13;旋转底座121、第一摆臂122、第二摆臂123、第三摆臂124、第一驱动电机125、第二驱动电机126;调节底座31、扫描摄像头32、喷涂头33、喷料储存筒34。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。附图中描述位置关系仅用于示例性说明,不能理解为对本专利的限制。
如附图1至3所示,全自动机器人激光打码设备,机械手、激光喷头、扫描喷漆组件和工作机架,工作机架一侧设有进料导辊组,所述的机械手设置在工作机架的设备安装工作面上,设备安装工作面前端设有横向输送装置,激光喷头安装在机械手上且位于横向输送装置的前方,进料导辊组位于机械手一侧,机械手另一侧设有扫描喷漆组件,设备安装工作面上的控制终端信号连接于机械手、激光喷头和扫描喷漆组件。
上述方案,所述的机械手主要由固定座、移动部和安装部组成,激光喷头固定在安装部的前端,安装部通过移动部设置在固定座上,机械手带动激光喷头位移至横向输送装置上的钢管,并使其激光喷头对准钢管一侧面。所述的移动部分为旋转底座、第一摆臂、第二摆臂和第三摆臂,第一摆臂底部安装在旋转底座,第一摆臂顶部通过转轴连接于第二摆臂一端,第二摆臂另一端通过转轴连接于第三摆臂,激光喷头安装在第三摆臂上的前端。所述的旋转底座带动第一摆臂转动,第一驱动电机设置在第一摆臂与旋转底座连接处且带动第一摆臂以转轴为轴心摆动,第二驱动电机设置在第一摆臂与第二摆臂连接处且带动第二摆臂以转轴为轴心摆动。
上述方案,所述的扫描喷漆组件主要由调节底座、扫描摄像头、喷涂头和喷料储存筒组成,扫描摄像头和喷涂头安装在调节底座上,扫描摄像头位于喷涂头一侧,喷料储存筒通过管道连接于喷涂头。所述的进料导辊组下方设有搬运组件,搬运组件将一整组钢管搬运至横向输送装置上,横向输送装置带动一整组钢管依次经过激光喷头和扫描喷漆组件。所述的进料导辊组设置驱动电机且通过驱动电机带动进料导辊转动,搬运组件底部通过驱动装置做线性往返运动,搬运组件中间向下凹陷形成一限位卡件。
实施步骤,机械设备将切割成段的钢管排列搬运至进料导辊组上,驱动电机带动进料导辊持转动,且带动整排钢管向前运输,运输至横向输送装置一侧,再利用搬运组件将其整排钢管从进料导辊组搬运至横向输送装置上;然后机械手上检测探头检测到钢管,并通过机械手来带动激光喷头位移至钢管的正前方,自动调整激光喷头位置,提高设备的精准度,启动激光喷头对钢管正面进行激光打码,将数据信息刻在钢管正面上,横向输送装置持续将钢管输送至扫描喷漆组件正前方;最后喷涂头上的检测探头检测到钢管,则通过控制器启动按喷涂头,将喷料储存筒内的漆料从喷涂头喷射在钢管上,避免钢管氧化后导致标志模糊丢失,再通过扫描摄像头进行摄影检测,并记录钢管的数据和检测喷漆效果。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,实施的加工对象不限钢管、钢卷和棒材。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 全自动机器人激光打码设备
- 一种全自动芯片激光打码检测设备