一种抛光机器人
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及机器人领域,更具体的说是一种抛光机器人。
背景技术
专利号为112077727A的发明公开了一种工程机械施工用抛光机器人,涉及工程机械技术领域,其技术方案是:包括抛光机器人本体、第一去屑装置、第二去屑装置,所述抛光机器人本体顶部安装有动力臂,所述动力臂一端安装有抛光盘,所述动力臂底部安装有第一去屑装置,所述第一去屑装置动力臂顶部外表面安装伺服电机,所述伺服电机输出端安装第一传送盘,所述第一传送盘外表面套接传送带,所述传送带一端套接第二传送盘,所述传送盘一侧固定连接转动轴,所述转动轴一端设有存屑盒,所述转动轴外表面套接固定杆,所述第一去屑装置底部安装有直线振动电机,该发明具有且方便收集碎屑,且收集起来的碎屑方便清理再收集起来循环利用,节约资源,节约人力的优点。该发明具有不能对直角进行抛光的缺点。
发明内容
本发明的目的是提供一种抛光机器人,具有能对直角进行抛光的优点。
本发明的目的通过以下技术方案来实现:
一种抛光机器人,包括抛光板Ⅰ、齿条和框架Ⅰ,抛光板Ⅰ上设置有齿条,抛光板Ⅰ和齿条均设置在框架Ⅰ上,抛光板Ⅰ能够实现线性滑动。
优选的,所述抛光机器人还包括框架Ⅱ、抛光板Ⅱ和滑杆,框架Ⅱ与框架Ⅰ固接,抛光板Ⅱ设置有有两个,两个抛光板Ⅱ上均设置有两个滑杆,多个滑杆均设置在框架Ⅱ上,两个抛光板Ⅱ均能够进行线性滑动。
优选的,所述两个抛光板Ⅱ的线性滑动轨迹与抛光板Ⅰ的线性滑动轨迹在同一平面内垂直。
优选的,两个所述抛光板Ⅱ均为平行四边形。
优选的,所述抛光机器人还包括抛光槽Ⅰ,多个抛光槽Ⅰ关于与抛光板Ⅰ的线性运动轨迹垂直中心面对称设置在抛光板Ⅰ上,多个抛光槽Ⅰ均与抛光板Ⅱ的线性滑动轨迹平行。
本发明一种抛光机器人的有益效果为:通过抛光板Ⅰ可以抛光到一些三个面组成的直角位置,还可以通过两个抛光板Ⅱ进行另一方向的抛光,实现对材料交错的抛光,达到更好的抛光效果,还可以通过两个抛光板Ⅱ的线性滑动将抛光板Ⅰ抛光后的碎屑进行清理,防止碎屑再次划伤材料。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
图1是对直角进行抛光的结构示意图;
图2是抛光板Ⅰ的结构示意图;
图3是对材料进行另一方向的抛光的结构示意图;
图4是抛光板Ⅱ的结构示意图;
图5是图2和图4的连接示意图;
图6是驱动图2进行滑动的结构示意图;
图7是滑动架的结构示意图;
图8是图1和图6的连接图;
图9是调节图8的结构示意图;
图10是辅助抛光的结构示意图;
图11是抛光机器人部分结构示意图。
图中:抛光板Ⅰ11;抛光槽Ⅰ12;齿条13;连接头14;辅助板15;框架Ⅰ21;安装架22;框架Ⅱ23;导向板24;抛光板Ⅱ31;滑杆32;随动杆33;抛光槽Ⅱ34;连接杆41;齿轮51;滑动架61;滑道62;螺纹板63;螺纹杆64;导向轮65;夹紧板66;调节杆71;螺栓头72;调节支架73;转动杆81;腰槽82。
具体实施方式
参考图1,详细说明往复打磨材料的实施过程:
一种抛光机器人包括框架Ⅰ21,框架Ⅰ21上滑动连接有抛光板Ⅰ11,抛光板Ⅰ11上固定连接有齿条13,齿条13对抛光板Ⅰ11起到限位的作用,防止抛光板Ⅰ11在框架Ⅰ21上无法稳定可靠的滑动,防止抛光板Ⅰ11在滑动过程中出现偏离和扭曲,抛光板Ⅰ11能够在框架Ⅰ21上进行往复性,周期性的线性滑动,实现抛光板Ⅰ11对其接触的材料进行往复性,周期性的打磨和抛光,与圆形的抛光轮相比,抛光板Ⅰ11可以抛光到一些三个面组成的直角位置,而圆形的抛光轮则无法实现,且抛光板Ⅰ11在抛光两个平面垂直的地方时具有更加良好的效果。
参考图3,详细说明对材料进一步抛光的实施过程:
所述抛光机器人还包括框架Ⅱ23,框架Ⅱ23固定连接在框架Ⅰ21上,框架Ⅱ23上设置有两个抛光板Ⅱ31,两个抛光板Ⅱ31上均固定连接有两个滑杆32,多个滑杆32均通过轴承与框架Ⅱ2进行连接,两个抛光板Ⅱ31均能够进行线性滑动,当两个抛光板Ⅱ31进行线性滑动时,两个抛光板Ⅱ31对材料进行进一步的抛光,达到更好的抛光效果,多个滑杆32均通过轴承与框架Ⅱ2进行摩擦,而轴承的转动效果可以减少多个滑杆32和框架Ⅱ23的磨损,延长设备的使用寿命。
参考图1、3和5,详细说明对材料进行抛光的实施过程:
两个抛光板Ⅱ31的线性滑动轨迹所在的直线与抛光板Ⅰ11的线性滑动轨迹所在的直线在同一平面内并且两条线相互垂直,当抛光板Ⅰ11对材料进行抛光后,两个抛光板Ⅱ31随后再次对材料进行抛光,且两个抛光板Ⅱ31的抛光滑动方向与抛光板Ⅰ11对材料进行抛光的方向交叉垂直,使得材料便面进行两个方向的抛光,防止在一个方向上抛光出现隆起的情况,造成材料表面抛光不合格的情况发生,影响材料的正常使用。
参考图3和4,详细说明两个抛光板Ⅱ清理碎屑的实施过程:
当抛光板Ⅰ11对材料进行抛光后,产生大量的抛光碎屑,如果放置在材料表面会在摆放或堆积时产生划痕,使得前期的抛光效果作废,当抛光板Ⅰ11对材料进行抛光后,两个抛光板Ⅱ31再次进行抛光,且两个抛光板Ⅱ31均为平行四边形,两个抛光板Ⅱ31在对材料进行抛光的同时,可以将材料上的抛光碎屑在抛光的时候带到两侧,随着两个抛光板Ⅱ31的抛光而将碎屑进行清洁,由于两个抛光板Ⅱ31的抛光滑动方向与抛光板Ⅰ11对材料进行抛光的方向交叉垂直,所以会直接将抛光板Ⅰ11抛光时产生的碎屑向两个抛光板Ⅱ31滑动的方向带动,又由于两个两个抛光板Ⅱ31均为平行四边形,两个倾斜的边具有导向效果,可以对抛光碎屑进行导向和推动,更好的将抛光碎屑清理掉,防止后续的堆积和摆放时出现划痕,影响材料的使用。
参考图2,详细说明抛光板Ⅰ抛光材料的实施过程:
抛光板Ⅰ11上设置有多个抛光槽Ⅰ12,抛光板Ⅰ11上的多个抛光槽Ⅰ12关于中心面对称,多个抛光槽Ⅰ12均与抛光板Ⅱ31的线性滑动轨迹平行,抛光板Ⅰ11上的多个抛光槽Ⅰ12可以增加抛光板Ⅰ11与材料的接触面积,增加抛光板Ⅰ11打磨材料的效率,抛光板Ⅰ11上的多个抛光槽Ⅰ12关于中心面对称,则其中一部分抛光槽Ⅰ12在抛光板Ⅰ11向一个方向上进行线性滑动时,增加抛光板Ⅰ11与材料的接触面积,而另一部分抛光槽Ⅰ12在抛光板Ⅰ11向另一个方向上进行线性滑动时,增加抛光板Ⅰ11与材料的接触面积,且抛光槽Ⅰ12为直角三角形,则对称设置的多个抛光槽Ⅰ12在抛光板Ⅰ11往复线性滑动的状态下,总有一部分抛光槽Ⅰ12可以增加抛光板Ⅰ11与材料的接触面积,确保抛光板Ⅰ11对材料的抛光效果。
参考图4,详细说明两个抛光板Ⅱ抛光材料的实施过程:
两个抛光板Ⅱ31上均开有有多个抛光槽Ⅱ34,多个抛光槽Ⅱ34可以增加两个抛光板Ⅱ31与抛光材料的接触面积,增加两个抛光板Ⅱ31的的抛光效果,多个抛光槽Ⅱ34均和抛光板Ⅰ11的线性运动轨迹平行,且两个抛光板Ⅱ31上设置的多个抛光槽Ⅱ34在进行线性滑动时,可以将抛光板Ⅰ11抛光出的碎屑进行刮除,两个抛光板Ⅱ31可以将抛光产生的碎屑从中间推向两侧,直到将抛光产生的碎屑从材料上推出,实现碎屑的清洁。
参考图5,详细说明对材料进行抛光的实施过程:
两个抛光板Ⅱ31上的靠近抛光板Ⅰ11的两个滑杆32上均固定连接有随动杆33,两个随动杆33上均转动连接有连接杆41,两个连接杆41上均转动连接有连接头14,两个连接头14均固定连接在齿条13上,当抛光板Ⅰ11进行滑动时,抛光板Ⅰ11带动齿条13滑动,齿条13带动两个连接杆41发生运动,两个连接杆41推动两个抛光板Ⅱ31进行滑动,抛光板Ⅰ11滑动到两个抛光板Ⅱ31抛光的位置时,两个抛光板Ⅱ31已经展开防止发生干涉,当抛光板Ⅰ11进行复位时,两个抛光板Ⅱ31也进行复位,抛光板Ⅰ11和两个抛光板Ⅱ31对同一个材料进行两个交叉垂直方向的抛光,可以有效防止由于抛光板Ⅰ11和两个抛光板Ⅱ31上出现残缺导致材料某一处的抛光处出现隆起,造成抛光不良,影响材料的使用。
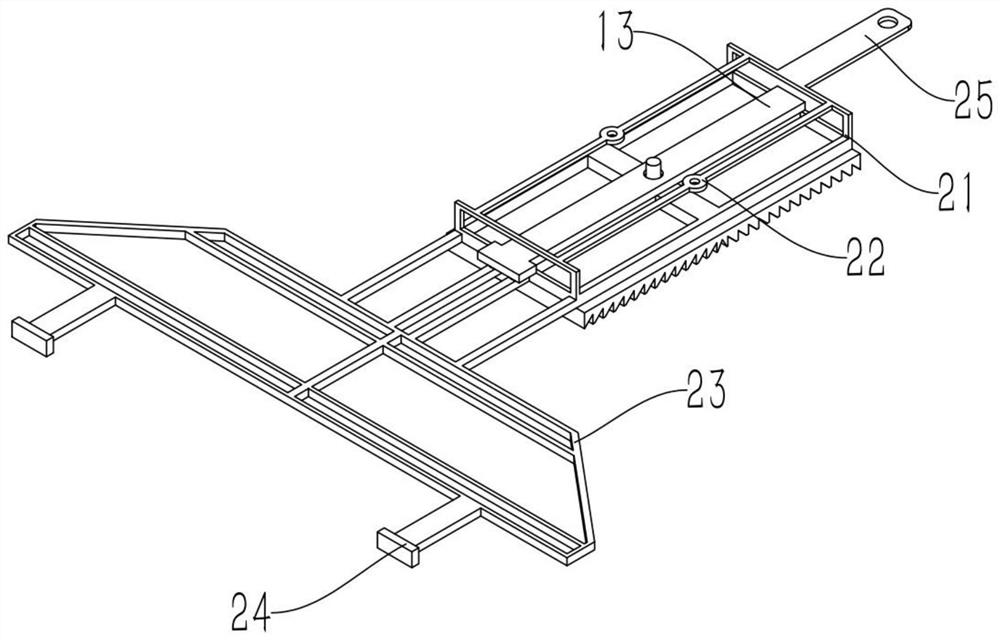
参考图6,详细说明抛光板Ⅰ运动的实施过程:
框架Ⅰ21上固定练级欸有两个安装架22,两个安装架22上均转动连接有齿轮51,两个齿轮51均和齿条13啮合传动,两个齿轮51分别固定连接在两个减速电机Ⅰ的输出轴上,两个减速电机Ⅰ分别固定连接在两个安装架22上,当需要进行抛光时,启动两个减速电机Ⅰ,两个减速电机Ⅰ带动两个齿轮51转动,两个齿轮51啮合驱动齿条13进行往复滑动,两个齿轮51均为缺齿齿轮,当其中一个齿轮51啮合驱动齿条13时,另一个齿轮51失去与齿条13的啮合,当啮合的齿轮51转动到与齿条13失去啮合时,另一个齿轮51开始与齿条13进行啮合,两个齿轮51交错啮合齿条13,实现齿条13的往复运动。
参考图6,详细说明齿条往复滑动的实施过程:
两个齿轮51的转动方向相反,当两个齿轮51交错啮合驱动齿条13时,两个齿轮51的转动方向相反才能够实现齿条13的往复滑动,实现齿条13带动抛光板Ⅰ11进行往复滑动,实现抛光。
参考图7和8,详细说明夹紧抛光材料的实施过程:
框架Ⅱ23上固定连接有两个导向板24,两个导向板24上均滑动连接有滑动架61,两个滑动架61上均通过螺纹连接有两个螺纹杆64,多个螺纹杆64上均转动连接有导向轮65,当需要对材料进行抛光时,将多个导向轮65紧贴在材料两侧,多个导向轮65能够进行转动,减少导向轮65与材料的摩擦,防止阻碍抛光机器人的移动,可以将抛光机器人紧紧稳固在抛光材料上,确保对抛光材料进行可靠稳定的抛光。
以下参考图7对夹紧加工材料的结构进行说明:
所述抛光机器人还包括滑道62和夹紧板66,两个滑动架61上均设置有滑道62,两个滑道62分别滑动连接在两个导向板24上,多个导向轮65上均转动连接有夹紧板66。
以下参考图7,详细说明夹紧材料的实施过程:
当多个导向轮65紧贴在材料两侧时,多个夹紧板66位于材料的下端,可以拧动多个螺纹杆64,调节多个夹紧板66距离滑动架61的高度,确保多个夹紧板66和抛光板Ⅰ11将抛光机器人固定在抛光材料上,可以确保多个夹紧板66将抛光机器人固定,保证抛光机器人对材料的可靠抛光。
以下参考图9对调节两个滑动架的结构进行说明:
所述抛光机器人还包括螺纹板63、调节杆71、螺栓头72和调节支架73,两个滑动架61上均固定连接有螺纹板63,两个螺纹板63均通过螺纹连接在调节杆71上,调节杆71的中部固定连接有螺栓头72,调节杆71转动连接在调节支架73上,调节支架73固定连接在框架Ⅱ23上。
以下参考图9,详细说明夹紧不同宽度的材料的实施过程:
可以转动螺栓头72,螺栓头72带动两个调节杆71转动,两个调节杆71螺纹驱动两个螺纹板63,两个螺纹板63带动两个滑动架61滑动,两个滑动架61带动多个导向轮65对不同宽度的材料进行夹紧,实现抛光机器人的固定。
以下参考图10对辅助抛光的结构进行说明:
所述抛光机器人还包括辅助板15、转动杆81、腰槽82和减速电机Ⅱ,辅助板15固定连接在框架Ⅰ21上,辅助板15和调节支架73上均固定连接有减速电机Ⅱ,两个减速电机Ⅱ的输出轴上均固定连接有转动杆81。两个转动杆81上均固定连接有腰槽82,辅助板15一侧的腰槽82内滑动连接有切割机构,调节支架73一侧的腰槽82内滑动连接有清扫机构。
以下参考图10,详细说明辅助抛光的实施过程:
当启动两个减速电机Ⅱ时,两个减速电机Ⅱ的输出轴带动两个转动杆81转动,两个转动杆81带动切割机构和清扫机构进行转动,启动切割机构先对未抛光的材料的凸出部分进行切割,切割之后再进行抛光,加快抛光的速度,当抛光后启动清扫机构,随着转动杆81的转动,再通过清扫机构对材料的抛光碎屑进行清扫,防止有碎渣的残留,在摆放和堆积时造成抛光后的材料出现划痕,损伤材料。
- 一种用于小型零件抛光的智能抛光机器人及其工作方法
- 一种双向式合页抛光机器人及其抛光方法