基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于汽车安全驾驶技术领域,涉及一种基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置。
背景技术
每年大量的交通事故来源于汽车超速行驶。虽然限速道路均配有限速标识,但是超速现象仍然频发。究其原因,与限速标识是否明显清晰,以及汽车驾驶员个人的道路安全意识等方面息息相关。交通违章处罚仅能作为“事后惩罚”的手段,并不能从根本上阻止超速现象的发生,只有依靠技术手段才能“事先阻止”超速现象的发生。
常规的技术方法是向车载GIS系统输入当前路段位置,查询由“位置-限速值”对所构成的哈希表,从而获取当前行驶路段的限速值。然后与当前车速进行比较,根据比较结果调控汽车的动力系统或者制动系统。该种方法存在以下三个方面的缺陷。第一,存储GIS系统的地图需要配备超大容量的非易失性存储介质,无形中提高了汽车制造环节的成本;第二,需要用户定期对GIS系统内部存储的地图进行更新,因而会额外增加维护工序;第三,读取存储介质的时间相对缓慢,可能会导致当前行驶路段的限速与时速出现时间不同步的问题,无法满足限速控制的实时性要求。
发明内容
(一)发明目的
本发明的目的是:提供一种基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置,解决传统的基于车载GIS系统存在制造成本高、需用户定期维护、实时性差等问题。
(二)技术方案
为了解决上述技术问题,本发明提供一种基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置包含测量模块和控制模块两大部分,测量模块测得汽车行驶过程中的时速V和位置P并传送至控制模块,控制模块根据时速V和位置P判断汽车是否超速,汽车超速时,由控制模块控制汽车调整限速。
其中,测量模块包括车载GPS子模块和车载5G通信子模块,控制模块包括速度比较器、CANFD调控子模块;车载GPS子模块用来测量汽车行驶过程中的时速V和位置P,将时速V传送至速度比较器,位置P传送至车载5G通信子模块,车载5G通信子模块根据位置P向远程终端服务器查询当前路段的限速值Vr并传送至速度比较器,速度比较器比较当前路段限速值Vr与汽车时速V的大小并将比较结果传送至CANFD调控子模块,当汽车超速时,CANFD调控子模块通过CANFD总线向汽车动力控制系统和汽车制动控制系统发出指令,实现对油门和刹车的控制。
所述远程终端服务器中存储有一个映射表,该映射表的内容包括:若干限速路段根据位置分成若干个经度区间{Lon1,Lon2,…,LonN}和若干个纬度区间{Lat1,Lat2,…,LatN},每个路段对应一个位置区间对[LonM,LatN],所有位置区间对与路段的限速值形成一一对应的映射表。
所述车载5G通信子模块收到车载GPS子模块发送的汽车当前位置P后,远程终端服务器首先提取当前位置P中的经度值Lon和纬度值Lat信息,然后在若干经度区间中搜索并定位Lon所在的经度区间LonX,同理在若干纬度区间中搜索并定位Lat所在的纬度区间LatY,组成当前路段的位置区间对[LonX,LatY],最后远程终端服务器在映射表中查询并提取当前路段的位置区间对[LonX,LatY]所对应的限速值Vr。
(三)有益效果
上述技术方案所提供基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置,采用最新的车联网技术,使用车载5G替代车载GIS系统,通过联网访问远程终端服务器,实现对当前路段限速的查询;同时,利用GPS可以完成对汽车时速和位置的测量;最后,根据速度比较器的输出结果,通过CANFD总线调节控制汽车的动力控制系统与制动控制系统,使汽车的时速降低到当前路段的限速之下。
附图说明
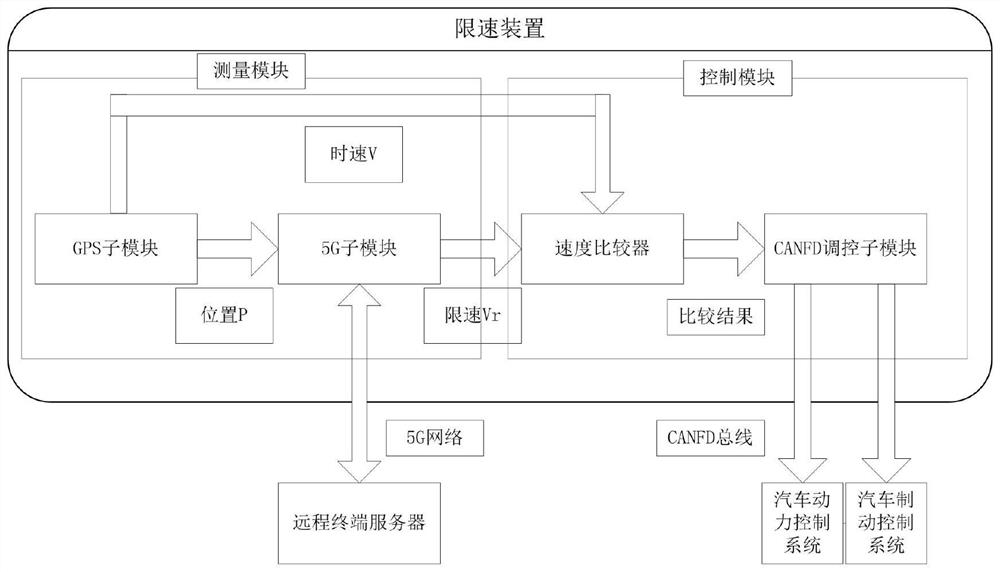
图1是本发明实施例装置原理框图。
图2是本发明实施例工作流程图。
具体实施方式
为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
本发明主要针对汽车行驶过程中安全限速的需求,设计一种基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置,如图1所示,该装置包含测量模块和控制模块两大部分,测量模块测得汽车行驶过程中的时速V和位置P并传送至控制模块,控制模块根据时速V和位置P判断汽车是否超速,汽车超速时,由控制模块控制汽车调整限速。
其中,测量模块包括车载GPS子模块和车载5G通信子模块,控制模块包括速度比较器、CANFD调控子模块;车载GPS子模块用来测量汽车行驶过程中的时速V和位置P,将时速V传送至速度比较器,位置P传送至车载5G通信子模块,车载5G通信子模块根据位置P向远程终端服务器查询当前路段的限速值Vr并传送至速度比较器,速度比较器比较当前路段限速值Vr与汽车时速V的大小并将比较结果传送至CANFD调控子模块,当汽车超速时,CANFD调控子模块通过CANFD总线向汽车动力控制系统和汽车制动控制系统发出指令,实现对油门和刹车的控制。
所述远程终端服务器中存储有一个映射表,该映射表的内容包括:若干限速路段根据位置分成若干个经度区间{Lon1,Lon2,…,LonN}和若干个纬度区间{Lat1,Lat2,…,LatN},每个路段对应一个位置区间对[LonM,LatN],所有位置区间对与路段的限速值形成一一对应的映射表。
所述车载5G通信子模块收到车载GPS子模块发送的汽车当前位置P后,远程终端服务器首先提取当前位置P中的经度值Lon和纬度值Lat信息,然后在若干经度区间中搜索并定位Lon所在的经度区间LonX,同理在若干纬度区间中搜索并定位Lat所在的纬度区间LatY,组成当前路段的位置区间对[LonX,LatY],最后远程终端服务器在映射表中查询并提取当前路段的位置区间对[LonX,LatY]所对应的限速值Vr。
如图2所示,本实施例安全限速装置通过测量、查询、比较、调控四个步骤,将汽车时速控制在限速以内,从而增强了汽车行驶的安全性,将测量模块记为模块一,控制模块记为模块二,具体实现步骤如下:
步骤一测量
测量步骤由模块一的车载GPS子模块完成:车载GPS子模块能够实时获取汽车行驶过程中的时速V和位置P,然后将位置P发送到车载5G通信子模块,将时速V发送给模块二的速度比较器。
步骤二查询
查询步骤由模块一的车载5G通信子模块完成:车载5G通信子模块收到车载GPS子模块传输的位置P后,将位置P的信息通过无线5G网络传输到远程终端服务器。远程终端服务器会根据位置P查询当前路段的限速信息,并将限速信息传回车载5G通信子模块。车载5G通信子模块提取出限速信息中的限速值Vr,并将Vr发送至模块二的速度比较器。
步骤三比较
比较步骤由模块二的速度比较器完成:速度比较器接收到汽车时速V和当前路段限速Vr后,对V和Vr的数值进行比较。如果V小于或等于Vr,则表明汽车当前未超速行驶,此时无需进行任何操作,返回步骤一。如果V大于Vr,则说明汽车已经处于超速状态,速度比较器会将两个速度的差值发给模块二的CANFD调控子模块。
步骤四调控
调控步骤由模块二的CANFD调控子模块完成:一旦CANFD调控子模块收到速度比较器的速度差值,就会根据速度差值制定调控策略。将调控策略以指令包的形式,通过CANFD总线发送给汽车动力控制系统和汽车制动控制系统,实现油门失效、主动刹车等机械控制,以降低汽车行驶速度。重复执行步骤一,直到速度比较器判断到汽车行驶时速V不超过限速值Vr,则CANFD调控子模块不再发送指令包,即调控步骤完成。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 基于GPS、车联网及CANFD总线协同工作的汽车安全限速装置
- 基于GPS、车联网及CANFD总线协同工作的汽车安全限速方法