一种车载网络通信系统消息回路时延确定方法及系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及异构车载网络领域,特别是涉及一种车载网络通信系统消息回路时延确定方法及系统。
背景技术
汽车工业目前是世界上最大的经济部门之一,每年生产数千万辆汽车。该行业见证了嵌入式应用程序数量的指数增长。现代车辆有70多个电子控制器,它们交换信号,代表从速度或发动机温度到多媒体和遥测数据等信息。
常见的车载网络有CAN、CAN FD、FlexRay、以太网。CAN总线是由BOSCH(博世)公司定义的一种解决汽车电子系统中ECU之间数据传输的实时性分布式通讯串行总线。CAN总线为5V差分信号的双线传输方式,通信介质常采用双绞线或同轴电缆。CAN总线协议由ISO11898(高速通信)和ISO11519(低速通信)组成,其中高速通信(125kbps~1Mpbs)主要应用于与汽车安全相关的领域如车身底盘与发动机的控制;低速通信(125kbps以下)主要应用于车辆信息中心、故障诊断、仪表显示等系统。
CAN FD是由CAN总线升级变化而来,一定程度上解决了CAN总线带宽和数据场长度的局限性。CAN FD的通信速率为15Mbps,相比于CAN总线,CAN FD通过减短位时间和增长数据场长度来实现通信速率的提高。
FlexRay总线以时间触发通信为主,以事件触发通信为辅,支持双通信冗余通信,每条通道最大速率为10Mbps,具有可靠的容错功能和更高的数据传输速率;FlexRay总线支持总线型、星型及混合型多种拓扑结构,具有更多样性的拓扑选择。FlexRay的通信周期分为静态段(Static Segment,ST)、动态段(Dynamic Segment,DYN)、符号窗(Symbol Window,SW)、网络空闲时间(Network Idle Time,NIT)。静态段采用(Time Division MultipleAccess,TDMA)的机制发送周期性、较为重要的消息;动态段(Flexible Time DivisionMultiple Access,FTDMA)的机制发送随机的、相对次要的消息。
车载以太网采用星型拓扑结构,数据传输速率可达100Mbps乃至Gbps级,具有高带宽、低时延和低成本等优势。车载以太网的出现不仅满足了ADAS、多媒体系统及车联网等功能的高带宽需求,在现如今还具有以更高性能适应自动驾驶及智能网联的浪潮的潜力。Gbps级车载以太网通信系统除了使用低损耗阶跃型塑料光纤(SI-POF),还采取了脉冲振幅调制(16-PAM)和转发错误校正(FEC)两种方式提高SI-POF的带宽。
随着汽车智能网联与自动驾驶的发展,汽车的应用程序、系统和网络的复杂性不断提高。现在,在现代汽车中发现无数新颖的应用,如娱乐系统、导航系统、车载诊断和增强现实(AR)仪表板,已成为一种常态。安装在车辆中的ECUs数量不断增加带来了新的挑战,因为这些ECUs要求更广泛的车载网络带宽和更低的延迟。为了满足汽车实时性、安全性等要求,准确的确定车载网络通信系统时延势在必行。
发明内容
本发明的目的是提供一种车载网络通信系统消息回路时延确定方法及系统,能够保证车载网络通信系统时延的准确性,进而能够保证车载网络系统控制策略的准确性。
为实现上述目的,本发明提供了如下方案:
一种车载网络通信系统消息回路时延确定方法,包括:
根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路;所述主干网包括:以太网;所述子网包括:FlexRay、CAN及CAN FD;
根据每条通信回路中的子网、主干网以及网关确定相应的通信回路的时延;
根据所有通信回路的时延确定车载网络通信系统内异构网络端到端的时延。
可选地,所述根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路,具体包括:
根据CAN、网关、以太网、网关以及CAN FD确定第一条通信回路;
根据CAN、网关、以太网、网关以及FlexRay确定第二条通信回路;
根据CAN FD、网关、以太网、网关以及FlexRay确定第三条通信回路;
根据CAN FD、网关、以太网、网关以及CAN确定第四条通信回路;
根据FlexRay、网关、以太网、网关以及CAN确定第五条通信回路;
根据FlexRay、网关、以太网、网关以及CAN FD确定第六条通信回路。
可选地,所述根据每条通信回路中的子网、主干网以及网关确定相应的通信回路的时延,具体包括:
根据消息流确定主干网的最大传输时间以及每个子网的最大传输时间;
根据每条通信回路中的主干网的最大传输时间、每个子网的最大传输时间、网关的最大传输时间确定相应的通信回路的时延。
一种车载网络通信系统消息回路时延确定系统,包括:
通信回路确定模块,用于根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路;所述主干网包括:以太网;所述子网包括:FlexRay、CAN及CAN FD;
通信回路的时延确定模块,用于根据每条通信回路中的子网、主干网以及网关确定相应的通信回路的时延;
异构网络端到端的时延确定模块,用于根据所有通信回路的时延确定车载网络通信系统内异构网络端到端的时延。
可选地,所述通信回路确定模块具体包括:
第一条通信回路确定单元,用于根据CAN、网关、以太网、网关以及CAN FD确定第一条通信回路;
第二条通信回路确定单元,用于根据CAN、网关、以太网、网关以及FlexRay确定第二条通信回路;
第三条通信回路确定单元,用于根据CAN FD、网关、以太网、网关以及FlexRay确定第三条通信回路;
第四条通信回路确定单元,用于根据CAN FD、网关、以太网、网关以及CAN确定第四条通信回路;
第五条通信回路确定单元,用于根据FlexRay、网关、以太网、网关以及CAN确定第五条通信回路;
第六条通信回路确定单元,用于根据FlexRay、网关、以太网、网关以及CAN FD确定第六条通信回路。
可选地,所述通信回路的时延确定模块具体包括:
最大传输时间确定单元,用于根据消息流确定主干网的最大传输时间以及每个子网的最大传输时间;
通信回路的时延确定单元,用于根据每条通信回路中的主干网的最大传输时间、每个子网的最大传输时间、网关的最大传输时间确定相应的通信回路的时延。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明所提供的一种车载网络通信系统消息回路时延确定方法及系统,根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路,即不同种类的网络以网关作为通讯节点,推导出整个车载网络通信系统的通信回路的时延,能够适应异构网络,并且更加全面。即保证车载网络通信系统时延的准确性,进而能够保证车载网络系统控制策略的准确性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
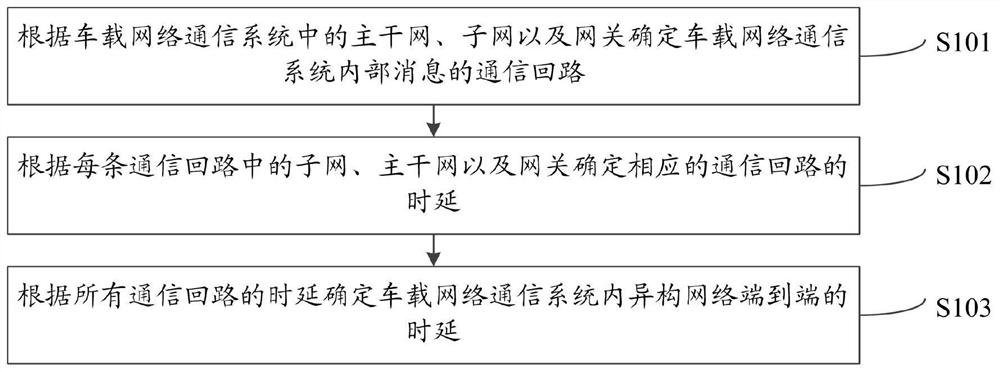
图1为本发明所提供的一种车载网络通信系统消息回路时延确定方法流程示意图;
图2为第一条通信回路原理示意图;
图3为第二条通信回路原理示意图;
图4为第三条通信回路原理示意图;
图5为第四条通信回路原理示意图;
图6为第五条通信回路原理示意图;
图7为第六条通信回路原理示意图;
图8为本发明所提供的一种车载网络通信系统消息回路时延确定系统结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种车载网络通信系统消息回路时延确定方法及系统,能够保证车载网络通信系统时延的准确性,进而能够保证车载网络系统控制策略的准确性。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明所提供的一种车载网络通信系统消息回路时延确定方法流程示意图,如图1所示,本发明所提供的一种车载网络通信系统消息回路时延确定方法,包括:
S101,根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路;所述主干网包括:以太网;所述子网包括:FlexRay、CAN及CAN FD;
S101具体包括:
根据CAN、网关、以太网、网关以及CAN FD确定第一条通信回路;
根据CAN、网关、以太网、网关以及FlexRay确定第二条通信回路;
根据CAN FD、网关、以太网、网关以及FlexRay确定第三条通信回路;
根据CAN FD、网关、以太网、网关以及CAN确定第四条通信回路;
根据FlexRay、网关、以太网、网关以及CAN确定第五条通信回路;
根据FlexRay、网关、以太网、网关以及CAN FD确定第六条通信回路。
有上述可知,以网关为节点,节点通过信息交换与不同的节点进行通信。
S102,根据每条通信回路中的子网、主干网以及网关确定相应的通信回路的时延;
S102根据消息流确定主干网的最大传输时间以及每个子网的最大传输时间;
根据每条通信回路中的主干网的最大传输时间、每个子网的最大传输时间、网关的最大传输时间确定相应的通信回路的时延。
作为一个具体的实施例,网关为N
在FlexRay总线的静态段ST中传输的消息流将被表示为
端到端通信流由集合
(1)确定每个子网的最大传输时间(最坏情况传输时间)
消息的最大传输时间C
FlexRay流
其中τ
由具有11位标识符和L
其中τ
最后,包含L
其中,CAN FD仲裁阶段和数据阶段期间的比特传输时间分别由τ
计算FlexRay、CAN FD和CAN最大传输时间具体包括:
①当作为消息的发起总线时,FlexRay、CANFD和CAN总线中最坏情况传输时间(WCTT)R
②当未作为消息的发起总线时,FlexRay、CAN FD和CAN总线中最坏情况传输时间(WCTT)R
(2)确定以太网的最大传输时间(最坏情况传输时间)
主干网以太网消息分为A类消息、B类消息及BE类消息,其中:
①A类消息:
其中,
②B类消息:
其中,
③BE类消息:
其中,
计算以太网中最坏情况传输时间(WCTT)的公式如下所示:
①当作为消息的发起总线时,以太网最坏情况传输时间(WCTT)R
②当未作为消息的发起总线时,以太网R
(3)通信回路的最大传输时间(最坏情况传输时间)计算公式如下:
消息流
其中R
根据S101确定六条通信回路,确定每一条通信回路的最大传输时间(最坏情况传输时间),具体包括:
⑴如图2所示,根据CAN、网关、以太网、网关以及CAN FD确定第一条通信回路的最坏情况传输时间计算公式为:
⑵由图3所示,根据CAN、网关、以太网、网关以及FlexRay确定第二条通信回路的最坏情况传输时间计算公式为:
⑶由图4所示,根据CAN FD、网关、以太网、网关以及FlexRay确定第三条通信回路的最坏情况传输时间计算公式为:
⑷由图5所示,根据CAN FD、网关、以太网、网关以及CAN确定第四条通信回路的最坏情况传输时间计算公式为:
⑸由图6所示,根据FlexRay、网关、以太网、网关以及CAN确定第五条通信回路的最坏情况传输时间计算公式为:
⑹由图7所示,根据FlexRay、网关、以太网、网关以及CAN FD确定第六条通信回路的最坏情况传输时间计算公式为:
S103,根据所有通信回路的时延确定车载网络通信系统内异构网络端到端的时延。
图8为本发明所提供的一种车载网络通信系统消息回路时延确定系统结构示意图,如图8所示,本发明所提供的一种车载网络通信系统消息回路时延确定系统,包括:
通信回路确定模块801,用于根据车载网络通信系统中的主干网、子网以及网关确定车载网络通信系统内部消息的通信回路;所述主干网包括:以太网;所述子网包括:FlexRay、CAN及CAN FD;
通信回路的时延确定模块802,用于根据每条通信回路中的子网、主干网以及网关确定相应的通信回路的时延;
异构网络端到端的时延确定模块803,用于根据所有通信回路的时延确定车载网络通信系统内异构网络端到端的时延。
所述通信回路确定模块801具体包括:
第一条通信回路确定单元,用于根据CAN、网关、以太网、网关以及CAN FD确定第一条通信回路;
第二条通信回路确定单元,用于根据CAN、网关、以太网、网关以及FlexRay确定第二条通信回路;
第三条通信回路确定单元,用于根据CAN FD、网关、以太网、网关以及FlexRay确定第三条通信回路;
第四条通信回路确定单元,用于根据CAN FD、网关、以太网、网关以及CAN确定第四条通信回路;
第五条通信回路确定单元,用于根据FlexRay、网关、以太网、网关以及CAN确定第五条通信回路;
第六条通信回路确定单元,用于根据FlexRay、网关、以太网、网关以及CAN FD确定第六条通信回路。
所述通信回路的时延确定模块802具体包括:
最大传输时间确定单元,用于根据消息流确定主干网的最大传输时间以及每个子网的最大传输时间;
通信回路的时延确定单元,用于根据每条通信回路中的主干网的最大传输时间、每个子网的最大传输时间、网关的最大传输时间确定相应的通信回路的时延。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种车载网络通信系统消息回路时延确定方法及系统
- 通信时延原因确定方法、装置及电子设备、存储介质