一种机器人搬运码垛系统面板及装置
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及机器人搬运设备技术领域,具体是一种机器人搬运码垛系统面板及装置。
背景技术
在社会生产过程中,物料的运输和存放均需要进行搬运和码垛工作;常规的搬运和码垛基本采用人力进行,对于大型或任务量过多的物料搬运和码垛则需要通过自动化搬运和码垛机器人。而自动化搬运和码垛机器人因其可大幅降低工人的劳动强度并具有远超过人工搬运的效率而被广泛应用于各行各业。
自动化搬运和码垛机器人的结构主要包括执行结构和系统面板结构,其中系统面板是固定在主体结构上,并且系统面板会粘附因搬运及码垛物料而扬起的灰尘;影响系统面板的显示以及工作;故而需要对系统面板进行灰尘清理,常规的清理方式是采用人工反复的擦拭,较为麻烦且擦拭扬起的灰尘可能还会落在面板上。
发明内容
本发明的目的在于提供一种机器人搬运码垛系统面板及装置,以解决背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:
一种机器人搬运码垛系统面板及装置,包括内部带有散热风机的系统屏幕板本体,系统屏幕板本体前端面沿着边沿设有边沿框,系统屏幕板本体顶部侧壁上具有用于排出热气流的散热孔;还包括引导分流横管件、调节件和两个横移清理组件,所述引导分流横管件设在系统屏幕板本体顶部并处于边沿框正上方,引导分流横管件的两端分别通过连接导流管与系统屏幕板本体内部相连通,引导分流横管件朝向边沿框的弧底处具有出气孔,引导分流横管件能够将系统屏幕板本体内部的散热气流引导至系统屏幕板本体表面;所述边沿框包括滑移梁和两个收纳槽,两个收纳槽对称设在系统屏幕板本体的两端侧,滑移梁设在两个收纳槽顶部之间,两个横移清理组件处于系统屏幕板本体前端部且横移清理组件顶部在滑移梁内侧滑动,横移清理组件在滑移梁内滑动时能够擦拭系统屏幕板本体前端面,收纳槽用于容纳滑移至滑移梁端部的横移清理组件;所述调节件转动设在引导分流横管件上,在所述调节件处于水平状态时,散热孔开启且引导分流横管件密封,在调节件处于倾斜状态时,散热孔关闭且引导分流横管件开启。
在上述技术方案的基础上,本发明还提供以下可选技术方案:
在一种可选方案中:所述系统屏幕板本体内部具有能够密封散热孔的密封板,密封板的一端部与系统屏幕板本体内壁铰接,调节件一端面上具有在其上滑动的铰接座,铰接座上铰接有连杆,连杆穿过其中一个散热孔与密封板侧壁铰接。
在一种可选方案中:所述调节件的一端部具有转动套设在引导分流横管件上的环套,两个环套之间具有弧形条板,所述弧形条板内壁贴附在引导分流横管件外表面。
在一种可选方案中:两个收纳槽为U型结构且两者槽口相对设置,滑移梁为矩形框结构且框体内一侧壁上具有齿条,所述横移清理组件包括吊架、纵向转轴、清扫叶片和自转齿轮,所述吊架位于滑移梁内侧并与滑移梁一内侧壁滑动配合,所述纵向转轴一端部与吊架转动配合且纵向转轴端部具有与齿条相啮合的自转齿轮,所述纵向转轴位于系统屏幕板本体前端面部分具有清扫叶片。
在一种可选方案中:所述吊架上还设有位于纵向转轴侧部的遮盖板,所述遮盖板能够在纵向转轴处于收纳槽内侧时,封闭收纳槽的槽口;所述遮盖板的边沿具有接触系统屏幕板本体前端面的刮条。
在一种可选方案中:所述遮盖板顶部开设有端孔槽且收纳槽顶部开设有与端孔槽相对应的孔洞,所述孔洞处具有能够弹性插接至端孔槽内的限定组件。
在一种可选方案中:所述限定组件包括限定插杆、上弧板和弹簧,所述限定插杆滑动插接至孔洞内,上弧板设在限定插杆的顶端部,所述弹簧设在收纳槽顶壁与上弧板之间。
在一种可选方案中:所述调节件与引导分流横管件的连接处设有凸起,凸起随着调节件旋转且凸起边侧与上弧板外壁相接触,调节件由倾斜状态旋转至水平状态时,凸起能够下压上弧板。
一种机器人搬运码垛装置,包括上述所述的机器人搬运码垛系统面板。
相较于现有技术,本发明的有益效果如下:
1、本发明中引导分流横管件能够将用于系统屏幕板本体内部散热的气流引向系统屏幕板本体前端面,可配合横移清理组件实现快速清理系统屏幕板本体前端面的灰尘;
2、本发明中调节件能够将系统屏幕板本体内部散热的气流在导向引导分流横管件内以及由散热孔之间转换,避免了热气流继续进出气孔31喷出而影响系统屏幕板本体1的表面质量;收纳槽的设置便于将横移清理组件隐藏;
3、本发明结构简单,可有效清理系统屏幕板本体端面的灰尘,便于使用者使用,并将灰尘清理结构隐藏,从而提高整个面板的美观度。
附图说明
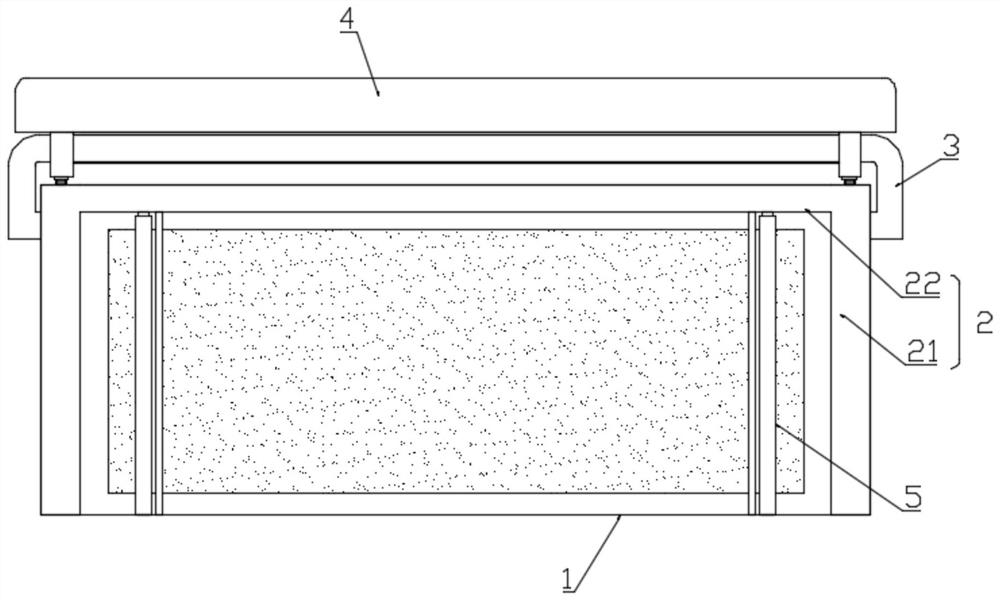
图1为本发明的一个实施例中的系统面板整体结构示意图。
图2为本发明的一个实施例中的调节件安装结构示意图。
图3为本发明的一个实施例中的调节件和引导分流横管件结构示意图。
图4为本发明的一个实施例中的边沿框结构示意图。
图5为本发明的一个实施例中的横移清理组件结构示意图。
图6为图2中A处放大结构示意图。
附图标记注释:系统屏幕板本体1、散热孔12、密封板13、边沿框2、收纳槽21、孔洞211、滑移梁22、齿条221、引导分流横管件3、出气孔31、连接导流管32、调节件4、连杆41、铰接座42、环套43、弧形条板45、横移清理组件5、遮盖板51、刮条52、吊架53、纵向转轴54、清扫叶片55、自转齿轮56、端孔槽57、限定组件7、限定插杆71、上弧板72、弹簧73。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明;在附图或说明中,相似或相同的部分使用相同的标号,并且在实际应用中,各部件的形状、厚度或高度可扩大或缩小。本发明所列举的各实施例仅用以说明本发明,并非用以限制本发明的范围。对本发明所作的任何显而易知的修饰或变更都不脱离本发明的精神与范围。
在一个实施例中,如图1-图4所示,一种机器人搬运码垛系统面板,包括内部带有散热风机的系统屏幕板本体1,系统屏幕板本体1前端面沿着边沿设有边沿框2,系统屏幕板本体1顶部侧壁上具有用于排出热气流的散热孔12;还包括引导分流横管件3、调节件4和两个横移清理组件5,所述引导分流横管件3设在系统屏幕板本体1顶部并处于边沿框2正上方,引导分流横管件3的两端分别通过连接导流管32与系统屏幕板本体1内部相连通,引导分流横管件3朝向边沿框2的弧底处具有出气孔31,引导分流横管件3能够将系统屏幕板本体1内部的散热气流引导至系统屏幕板本体1表面;所述边沿框2包括滑移梁22和两个收纳槽21,两个收纳槽21对称设在系统屏幕板本体1的两端侧,滑移梁22设在两个收纳槽21顶部之间,两个横移清理组件5处于系统屏幕板本体1前端部且横移清理组件5顶部在滑移梁22内侧滑动,横移清理组件5在滑移梁22内滑动时能够擦拭系统屏幕板本体1前端面,收纳槽21用于容纳滑移至滑移梁22端部的横移清理组件5;所述调节件4转动设在引导分流横管件3上,在所述调节件4处于水平状态时,散热孔12开启且引导分流横管件3密封,在调节件4处于倾斜状态时,散热孔12关闭且引导分流横管件3开启;
在本实施例中,在系统屏幕板本体1前端面因搬运码垛物品时沾染扬起的灰尘后,通过将处于水平状态的调节件4旋转至倾斜状态后,散热孔12关闭且引导分流横管件3开启,而系统屏幕板本体1内部在散热风机作用下,向外侧溢出的气流经连接导流管32导入至引导分流横管件3内部,并经出气孔31朝向系统屏幕板本体1前端面喷出,可吹走系统屏幕板本体1表面扬起的灰尘;再拨动两个收纳槽21内的横移清理组件5沿着滑移梁22移动,横移清理组件5能够将系统屏幕板本体1表面顽固粘附的灰尘刮掉,并配合出气孔31喷出的气流而有效清理系统屏幕板本体1表面的灰尘,便于使用者使用;在清理完灰尘后,调节件4恢复至水平状态,出气孔31封闭且散热孔12开启,热气流经系统屏幕板本体1边侧部的散热孔12喷出,避免热气流继续进出气孔31喷出而影响系统屏幕板本体1的表面质量;同时两个横移清理组件5能够滑移至对应的收纳槽21内隐藏,增加系统屏幕板本体1前端面美观度;
在一个实施例中,如图2和图3所示,所述系统屏幕板本体1内部具有能够密封散热孔12的密封板13,密封板13的一端部与系统屏幕板本体1内壁铰接,调节件4一端面上具有在其上滑动的铰接座42,铰接座42上铰接有连杆41,连杆41穿过其中一个散热孔12与密封板13侧壁铰接;在本实施例中,调节件4绕引导分流横管件3旋转时,调节件4通过连杆41能够牵引密封板13绕与系统屏幕板本体1内壁铰接处旋转,密封板13能够旋转至贴附于散热孔12而封闭散热孔12;进而调节件4的转动能够实现散热孔12的启闭;
在一个实施例中,如图2和图3所示,所述调节件4的一端部具有转动套设在引导分流横管件3上的环套43,两个环套43之间具有弧形条板45,所述弧形条板45内壁贴附在引导分流横管件3外表面;在本实施例中,调节件4的旋转能够通过环套43驱使弧形条板45随之转动,由于弧形条板45内壁与引导分流横管件3表面接触,当弧形条板45旋转至出气孔31处时而起到密封出气孔31的作用,弧形条板45与出气孔31处于错位时,出气孔31开启;从而调节件4的旋转能够实现出气孔31的启闭。
在一个实施例中,如图1、图4和图5所示,两个收纳槽21为U型结构且两者槽口相对设置,滑移梁22为矩形框结构且框体内一侧壁上具有齿条221,所述横移清理组件5包括吊架53、纵向转轴54、清扫叶片55和自转齿轮56,所述吊架53位于滑移梁22内侧并与滑移梁22一内侧壁滑动配合,所述纵向转轴54一端部与吊架53转动配合且纵向转轴54端部具有与齿条221相啮合的自转齿轮56,所述纵向转轴54位于系统屏幕板本体1前端面部分具有清扫叶片55;在本实施例中,整个横移清理组件5沿着滑移梁22移动过程中,由于自转齿轮56与齿条221相啮合,纵向转轴54在移动中自转,从而清扫叶片55能够以旋转的方式清理系统屏幕板本体1前端面的灰尘;
在一个实施例中,如图5所示,所述吊架53上还设有位于纵向转轴54侧部的遮盖板51,所述遮盖板51能够在纵向转轴54处于收纳槽21内侧时,封闭收纳槽21的槽口;所述遮盖板51的边沿具有接触系统屏幕板本体1前端面的刮条52;在本实施例中,横移清理组件5在移动时,刮条52接触系统屏幕板本体1前端面而能够实现刮除顽固灰尘,并且纵向转轴54及清扫叶片55处于收纳槽21内部时,遮盖板51能够封闭收纳槽21的槽口,从而避免灰尘进入收纳槽21内部;
在一个实施例中,如图2、图5和图6所示,所述遮盖板51顶部开设有端孔槽57且收纳槽21顶部开设有与端孔槽57相对应的孔洞211,所述孔洞211处具有能够弹性插接至端孔槽57内的限定组件7;在本实施例中,横移清理组件5处于收纳槽21内,通过限定组件7插接至端孔槽57内而限定横移清理组件5的移动,从而避免因碰撞横移清理组件5脱离收纳槽21内部;
在一个实施例中,如图6所示,所述限定组件7包括限定插杆71、上弧板72和弹簧73,所述限定插杆71滑动插接至孔洞211内,上弧板72设在限定插杆71的顶端部,所述弹簧73设在收纳槽21顶壁与上弧板72之间;在本实施例中,通过弹簧73的收缩弹性,可使得限定插杆71穿过孔洞211内部并插接至端孔槽57内,进而限定横移清理组件5脱离收纳槽21内部;
在一个实施例中,如图3和图6所示,所述调节件4与引导分流横管件3的连接处设有凸起44,凸起44随着调节件4旋转且凸起44边侧与上弧板72外壁相接触,调节件4由倾斜状态旋转至水平状态时,凸起44能够下压上弧板72;在本实施例中,调节件4处于倾斜状态时,凸起44不再施压于上弧板72,在弹簧73的弹性作用下,上弧板72上移并带动限定插杆71脱离端孔槽57,从而横移清理组件5可以脱离收纳槽21并移动清理系统屏幕板本体1前端面灰尘;当调节件4处于水平状态,凸起44能够下压上弧板72并使得限定插杆71穿过孔洞211内部并插接至端孔槽57内,进而限定横移清理组件5脱离收纳槽21内部,保证横移清理组件5的稳固。
上述实施例提供了一种机器人搬运码垛系统面板,其中,在系统屏幕板本体1前端面因搬运码垛物品时沾染扬起的灰尘后,通过将处于水平状态的调节件4旋转至倾斜状态后,散热孔12关闭且引导分流横管件3开启,而系统屏幕板本体1内部在散热风机作用下,向外侧溢出的气流经连接导流管32导入至引导分流横管件3内部,并经出气孔31朝向系统屏幕板本体1前端面喷出,可吹走系统屏幕板本体1表面扬起的灰尘;再拨动两个收纳槽21内的横移清理组件5沿着滑移梁22移动,横移清理组件5能够将系统屏幕板本体1表面顽固粘附的灰尘刮掉,并配合出气孔31喷出的气流而有效清理系统屏幕板本体1表面的灰尘,便于使用者使用;在清理完灰尘后,调节件4恢复至水平状态,出气孔31封闭且散热孔12开启,热气流经系统屏幕板本体1边侧部的散热孔12喷出,避免热气流继续进出气孔31喷出而影响系统屏幕板本体1的表面质量;同时两个横移清理组件5能够滑移至对应的收纳槽21内隐藏,增加系统屏幕板本体1前端面美观度。
本发明还提供了一种机器人搬运码垛装置,该装置包括上述所述的机器人搬运码垛系统面板。
以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
- 一种智能化搬运码垛实训机器人装置及控制方法
- 一种盒装食品机器人搬运码垛系统
- 一种盒装食品机器人搬运码垛系统