一种飞机/悬挂物网络架构及控制方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明属于航空电子领域,涉及一种飞机/悬挂物网络架构及控制方法。
背景技术
机载武器系统是现代作战飞机的重要组成部分,由悬挂物管理单元、运载悬挂物、任务悬挂物及相互间的飞机/悬挂物网络等部分组成。通常情况下,运载悬挂物挂载于飞机机翼下方,任务悬挂物挂载于运载悬挂物下方。
为了提高飞机挂载能力,出现了在单个飞机挂点上挂载多个任务悬挂物的挂载构型。挂载构型包括可挂载2个任务悬挂物的并联挂载构型,可挂载3个以上任务悬挂物的复式挂载构型等。
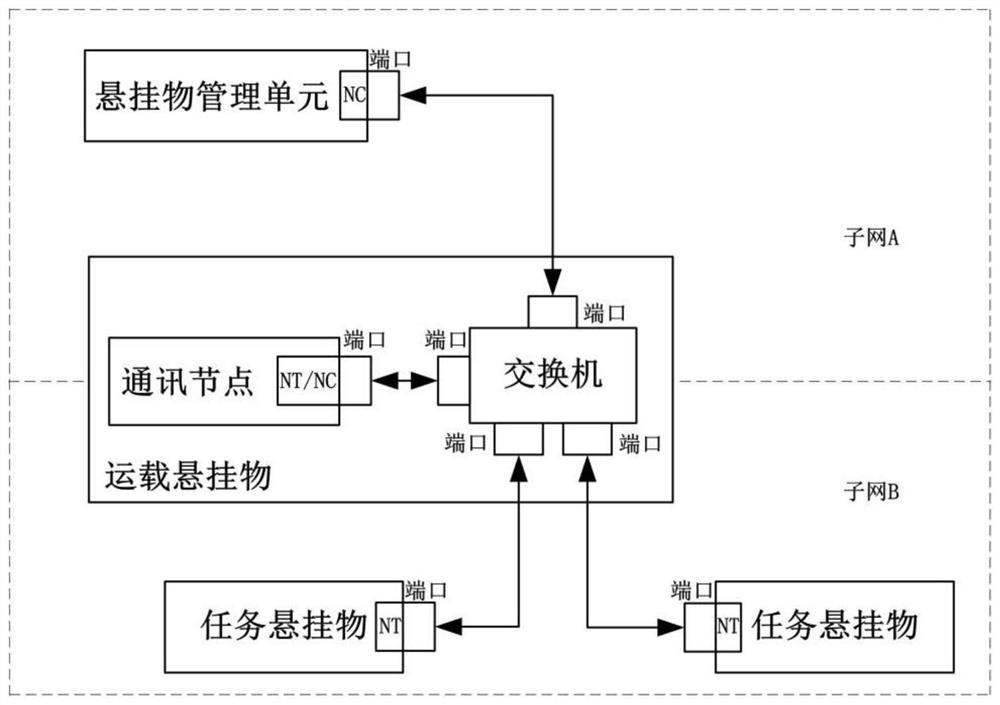
如图1所示,在基于FC-AE-1553通讯网络的飞机/悬挂物网络架构下,为了解决单个挂点挂载多个任务悬挂物的问题,传统方案是:
1)运载悬挂物内部部署1个交换机和2个通讯节点;
2)交换机提供多个端口,用于运载悬挂物与任务悬挂物的连接;
3)通讯节点1提供1个端口,作为NT(网络终端)与悬挂物管理单元通讯;
4)通讯节点2提供1个端口,作为NC(网络控制器)与任务悬挂物通讯;
5)通讯节点1与通讯节点2之间需通过内部总线进行数据交换。
可见,从飞机/悬挂物网络架构来说,传统方案中运载悬挂物内部的通讯节点1、通讯节点2分属于相互独立的子网A和子网B。从技术实现来说,运载悬挂物内部需要部署两个通讯节点。从工程应用来说,运载悬挂物内部空间狭小,且对重量、制造成本有严格限制。因此,需要综合考虑尺寸、重量、成本等因素提出一种更加优化的飞机/悬挂物网络构型。
FC-AE-1553通讯网络支持交换型拓扑结构,提供了更大的组网灵活性。本发明正是利用交换型拓扑结构组网灵活的特点,提出了一种新型的飞机/悬挂物网络架构,可将运载悬挂物内部的2个通讯节点减少为1个通讯节点。对于运载悬挂物来说,可有效减少内部通讯节点数量,从而节省空间、减轻重量、降低制造成本。
发明内容
要解决的技术问题
为了避免现有技术的不足之处,本发明提出一种飞机/悬挂物网络架构及控制方法,满足单个飞机挂点挂载多个任务悬挂物的工程需求。针对FC-AE-1553交换型网络组网灵活的特点,提出的飞机/悬挂物网络架构,有利于节省运载悬挂物内部空间,减轻运载悬挂物内部通讯节点的总重量,降低运载悬挂物内部通讯节点的制造成本。
技术方案
一种飞机/悬挂物网络架构,包括悬挂物管理单元、运载悬挂物单元、第一任务悬挂物和第二任务悬挂物单元;悬挂物管理单元;其特征在于所述运载悬挂物内部有且仅有1个通讯节点,该通讯节点与内部交换机连接;悬挂物管理单元仅与运载悬挂物内部的交换机连接;运载悬挂物内部通讯节点与悬挂物管理单元构成子网A;运载悬挂物内部通讯节点作为子网A的NT,悬挂物管理单元作为子网A的NC;运载悬挂物内部通讯节点与任务悬挂物构成子网B。运载悬挂物内部通讯节点作为子网B的NC,任务悬挂物作为子网B的NT。
所述运载悬挂物内部通讯节点仅有1个端口,具有2种工作模式:在NT模式下,运载悬挂物内部通讯节点作为NT与子网A悬挂物管理单元通讯;在NC模式下,运载悬挂物内部通讯节点作为NC与子网B的任务悬挂物进行通讯。
一种权利要求1或2所述飞机/悬挂物网络架构的控制方法,其特征在于:
1、并联挂载装置内部通讯模块与悬挂物管理单元间的数据流:并联挂载装置内部通讯模块接收悬挂物管理单元发送的任务悬挂物控制指令,并向悬挂物管理单元发送任务悬挂物状态;
2、并联挂载装置内部通讯模块与任务悬挂物间的数据流:并联挂载装置内部通讯模块向任务悬挂物发送任务悬挂物控制指令,并接收任务悬挂物发送的任务悬挂物状态;
3、悬挂物管理单元与任务悬挂物间的数据流:悬挂物管理单元与任务悬挂物间传递控制指令或状态时,均经由并联挂载装置内部通讯模块进行转发;悬挂物管理单元不会经由并联挂载装置内部交换机向任务悬挂物直接发送任务悬挂物控制指令;任务悬挂物也不会经由并联挂载装置内部交换机直接向悬挂物管理单元发送任务悬挂物状态。
所述运载悬挂物内部通讯节点既隶属于子网A,又隶属于子网B,在1个运载悬挂物内部通讯节点的1个端口上与2个子网通讯,运载悬挂物内部通讯节点设置两种工作模式:1)NT模式。在NT模式下,运载悬挂物内部通讯节点作为NT与子网A的悬挂物管理单元进行通讯;2)NC模式。在NC模式下,运载悬挂物内部通讯节点作为NC与子网B的任务悬挂物进行通讯。
所述运载悬挂物内部通讯节点采用时间片轮转处理方法进行工作模式的切换:
1)运载悬挂物内部通讯节点将时间片划分为周期交替的Δt1、Δt2;
2)在Δt1时间片内,运载悬挂物内部通讯节点工作于NT模式;
在Δt2时间片内,运载悬挂物内部通讯节点工作于NC模式。
有益效果
本发明提出的一种飞机/悬挂物网络架构及控制方法,在单个飞机挂点挂载多个任务悬挂物的应用场景下,采用传统的飞机/悬挂物网络架构时,需要在运载悬挂物内部部署2个通讯节点,共计2个端口。本发明基于FC-AE-1553通讯网络,利用交换型拓扑结构组网灵活的特点,只需在运载悬挂物内部部署1个通讯节点,通讯节点只需提供1个端口。对于运载悬挂物来说,采用本发明所述飞机/悬挂物网络架构,可有效减少内部通讯节点数量,从而节省内部空间、减轻重量、降低制造成本。
附图说明
图1传统飞机/悬挂物网络架构
图2本发明飞机/悬挂物网络架构示意图
图3时间片轮转处理示意图
图4实施示例
图5运载悬挂物内部通讯模块与悬挂物管理单元间数据流
图6运载悬挂物内部通讯模块与任务悬挂物间数据流
具体实施方式
现结合实施例、附图对本发明作进一步描述:
本发明一种飞机/悬挂物网络架构如图2所示,包括以下组成部分:
1)1个悬挂物管理单元;
2)1个运载悬挂物。运载悬挂物内部包含1台交换机和1个通讯节点;
3)1个或多个任务悬挂物。
从物理连接关系来说,本发明所述的悬挂物管理单元、通讯节点、任务悬挂物、交换机处于同一个飞机/悬挂物网络系统,物理连接关系如下:
1)悬挂物管理单元的1个端口与运载悬挂物内部交换机的1个端口连接;
2)运载悬挂物内部通讯节点的1个端口与交换机的1个端口连接;
3)每个任务悬挂物的1个端口与运载悬挂物内部交换机的1个端口连接。
从数据交互关系来说,本发明所述飞机/悬挂物网络架构可划分为两个子网:
1)运载悬挂物内部通讯节点与悬挂物管理单元组成子网A。在子网A中,悬挂物管理单元作为NC,运载悬挂物内部通讯节点作为NT;
2)运载悬挂物内部通讯节点与任务悬挂物组成子网B。在子网B中,运载悬挂物内部通讯节点作为NC,任务悬挂物作为NT。
本发明所述运载悬挂物内部通讯节点既隶属于子网A,又隶属于子网B。为了在1个运载悬挂物内部通讯节点的1个端口上与2个子网通讯,运载悬挂物内部通讯节点设置了两种工作模式:
1)NT模式。在NT模式下,运载悬挂物内部通讯节点作为NT与子网A的悬挂物管理单元进行通讯;
2)NC模式。在NC模式下,运载悬挂物内部通讯节点作为NC与子网B的任务悬挂物进行通讯。
如图3所示,本发明所述运载悬挂物内部通讯节点采用时间片轮转处理方法进行工作模式的切换:
1)运载悬挂物内部通讯节点将时间片划分为周期交替的Δt1、Δt2;
2)在Δt1时间片内,运载悬挂物内部通讯节点工作于NT模式;
3)在Δt2时间片内,运载悬挂物内部通讯节点工作于NC模式。
实施例如图4所示,以飞机的1个挂点挂载2个任务悬挂物为例,对本发明的实施方式进行说明。
本发明所述架构的实施,包含1个悬挂物管理单元、1个并联挂载装置、2个任务悬挂物。并联挂载装置属于运载悬挂物。
并联挂载装置内安装有且仅有1个通讯模块和1台交换机。通讯模块对应本发明中运载悬挂物内部通讯节点。并联挂载装置内部通讯模块有且仅有1个端口。并联挂载装置内部交换机有4个端口。
并联挂载装置内部及外部交联关系如下:
1)内部交联关系:并联挂载装置内部交换机的1个端口与通讯模块唯一的1个端口连接;
2)外部交联关系:并联挂载装置内部交换机的3个端口分别与悬挂物管理单元、2个任务悬挂物连接。
悬挂物管理单元对任务悬挂物进行控制及状态监控。如图5、图6所示,本发明所述架构中数据流描述如下:
1)并联挂载装置内部通讯模块与悬挂物管理单元间的数据流:并联挂载装置内部通讯模块接收悬挂物管理单元发送的任务悬挂物控制指令,并向悬挂物管理单元发送任务悬挂物状态;
2)并联挂载装置内部通讯模块与任务悬挂物间的数据流:并联挂载装置内部通讯模块向任务悬挂物发送任务悬挂物控制指令,并接收任务悬挂物发送的任务悬挂物状态;
3)悬挂物管理单元与任务悬挂物间的数据流:悬挂物管理单元与任务悬挂物间传递控制指令或状态时,均经由并联挂载装置内部通讯模块进行转发。悬挂物管理单元不会经由并联挂载装置内部交换机向任务悬挂物直接发送任务悬挂物控制指令。任务悬挂物也不会经由并联挂载装置内部交换机直接向悬挂物管理单元发送任务悬挂物状态。
以悬挂物管理单元向任务悬挂物发送控制指令为例,并联挂载装置内部通讯模块的处理流程如下:
1)悬挂物管理单元作为NC向并联挂载装置发送任务悬挂物控制指令;
2)并联挂载装置内部通讯模块在某Δt1时间片内工作于NT模式,接收悬挂物管理单元发送的任务悬挂物控制指令;
3)在随后的Δt2时间片内,并联挂载装置内部通讯模块工作于NC模式,向作为NT的任务悬挂物转发悬挂物管理单元发送的任务悬挂物控制指令。
- 一种无人驾驶的悬挂式磁悬浮列车及其控制方法
- 一种飞机内埋悬挂物自动占位控制方法
- 一种飞机悬挂物的一阶弯曲频率确定方法