一种基于5G通信的无人机自主巡检系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及特高压线路运检技术领域,尤其涉及一种基于5G通信的无人机自主巡检系统。
背景技术
随着社会经济的高速发展,国家对供电可靠性要求的进一步提高,对无人机电力巡检的需求也不断提高。输电线路巡检作业正在由传统的人工巡检向无人机和人工协同巡检模式转变。无人机巡检作业有效缓解了巡视效率低、巡视质量不统一、无法定量判断设备状态、覆盖细节不够等问题。
伴随着无线通信技术、航空遥感测绘技术、GPS导航定位技术及自动控制技术的发展,无人机技术的运用也日臻成熟,无人机应用于电力输电线路巡检,不受地形地貌限制,尤其适用于险峻山区、多河流地貌下的巡线工作。机载高清摄像设备可对输电线路运行状况进行实时在线定位和监控,地面控制人员可根据地面站回传实况及时发现排除线路缺陷及重大隐患,线路巡检效率得以大幅提高,节省了大量人力、物力,提高了巡检人员工作安全系数。
随着电力巡线无人机的飞速普及和发展,无人机通信服务传统上往往采用视距控制飞行,或者点对点测控方式,利用作用距离在几十公里以内的专用测控站,为无人机提供通信支撑。对于飞行距离在几百乃至上千公里的中长距离无人机测控场景,虽然也可以通过测控站接力或者卫星通信的方式建立连接,但这些连接方式往往会受到响应速度、建设成本等问题的制约。
基于5G网络,进行无人机超视距飞行,将可以实现强实时、长距离、跨地域、高可靠、低成本的无人机飞行协同测控,保证无人机在飞行过程中的遥测数据、飞控指令以及采集到的高清视频等信息能够实时可靠传输。在超视距巡线服务的基础上,可以实现无人机飞行数据的实时分析与缺陷识别,提高无人机巡线的应用价值。将5G通信模组和无人机融合应用于特高压密集输电通道运维,转变现有无人机巡检模式,实现无人机自主飞行、超视距飞行控制、巡检图像实时回传是无人机在电力巡线方面亟待研究的方向,也是提升密集通道运维工作效率效益和精益管理水平的需要。
因此,有必要提供一种基于5G通信的无人机自主巡检系统解决上述技术问题。
例如,中国专利CN201910509274.6公开了一种基于无线充电无人机的轨道巡检方法及系统;采用无线充电方式对无人机进行充电,使得无人机可以在巡检的线路上进行无线充电,提高了巡检的距离和充电效率;但该申请更多的注重无人机的续航问题,对于数据的反馈依然存在通信效率问题。
发明内容
本发明主要解决现有的技术中无人机系统容易出现通信故障以及测控距离短的问题;提供一种基于5G通信的无人机自主巡检系统,通过5G通信模组与无人机进行集成,可以延长测控距离,使得图像的传递不会出现延时、卡顿、数据丢失和回传效果不理想等问题。
本发明的上述技术问题主要是通过下述技术方案得以解决的:一种基于5G通信的无人机自主巡检系统,包括巡检运行模块以及采用5G通讯模块与巡检运行模块连接的控制分析模块,所述巡检运行模块包括数据采集单元和无人机模块,所述数据采集单元的输出端与所述巡检运行模块的输入端双向连接,所述无人机模块的输出端与所述巡检运行模块的输入端双向连接;所述控制分析模块包括无人机供电单元和地面工作站,所述无人机供电单元的输出端双向连接有自主巡检控制单元,所述地面工作站的输出端双向连接有巡检作业管控单元,所述巡检作业管控单元的输出端双向连接有数据分析单元,所述数据分析单元的输出端双向连接有应急处理单元。所述5G通讯模块包括中央处理器单元、存储单元和5G通信模组单元,所述中央处理器单元分别与存储单元和5G通信模组单元双向连接。数据采集单元包括有可见光相机和红外相机,保证巡检运行模块可以获取到清晰、高清的实时图像数据,采用5G通讯模块与远程的控制分析模块连接,5G通讯模块具有高效通信功能,能快速稳定的传递高清图像信息,保证数据采集单元的图像数据可以及时的传递给远程的控制分析模块,不会出现延时、卡顿、数据丢失和回传效果不理想等问题,同时,采用5G通讯模块,可以延长测控距离,使得无人机可以进行超视距飞行,可以实现强实时、长距离、跨地域、高可靠、低成本的无人机飞行协同测控。
作为优选,所述的无人机模块包括路径规划单元,所述路径规划单元的输出端双向连接有定时控制单元,所述定时控制单元的输出端双向连接有电量监测单元。
作为优选,所述的无人机模块为无人机实体且四周均开设有两个第一滑槽,两个所述第一滑槽的内部滑动连接有第一滑块,所述第一滑块的顶部且位于两个所述第一滑槽的内部设置有第一弹簧。
作为优选,所述的第一滑块的正面转动连接有顶杆。
作为优选,两个所述第一滑槽的顶部转动连接有支撑杆,所述支撑杆的两侧与所述顶杆的另一端转动连接。
作为优选,所述的顶杆的内侧固定连接有连接杆。
作为优选,所述的支撑杆的底部转动连接有底板,所述底板的两侧均固定安装有纵向接地结构。
作为优选,所述的纵向接地结构包括贯穿孔,所述贯穿孔的内部设置有限位杆,所述限位杆的表面且位于所述底板的底部设置有第二弹簧。
作为优选,所述的限位杆的底部固定安装有滚动轮。
作为优选,所述的限位杆的顶部固定安装有连接板。
本发明的有益效果是:通过巡检运行模块中的数据采集单元和无人机模块和5G通讯模块以及控制分析模块之间的相互配合,能够通过控制无人机对特高压输电通道进行自主巡检,超视距飞行控制,实时获取巡检画面,并可以根据巡检画面情况进行无人机远程控制,操作简单方便,线路巡检效率得以大幅提高,节省了大量人力、物力,提高了巡检人员工作安全系数。
附图说明
图1为本发明提供的一种基于5G通信的无人机自主巡检系统的第一实施例的结构框图;
图2为本发明提供的一种基于5G通信的无人机自主巡检系统的第二实施例的结构框图;
图3为图1所示的外部立体的结构示意图;
图4为图3所示的A部放大示意图;
图5为本发明提供的一种基于5G通信的无人机自主巡检系统的第三实施例的结构框图。
图中:1、5G通讯模块,2、控制分析模块,3、无人机供电单元,4、自主巡检控制单元,5、地面工作站,6、巡检作业管控单元,7、数据分析单元,8、应急处理单元,9、巡检运行模块,10、数据采集单元,11、无人机模块,12、中央处理器单元,13、存储单元,14、5G通信模组单元,15、路径规划单元,16、定时控制单元,17、电量监测单元,18、第一滑槽,19、第一滑块,20、第一弹簧,21、顶杆,22、支撑杆,23、连接杆,24、底板,25、纵向接地结构,251、贯穿孔,252、限位杆,253、第二弹簧,26、滚动轮,27、连接板,28、卡槽,29、第二滑槽,30、第二滑块,31、固定块,32、插接杆,33、螺纹杆,34、螺纹块,37、联动杆。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
为了使本发明的目的、技术方案及优点更加清楚明白,通过下述实施例并结合附图,对本发明实施例中的技术方案的进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定发明。
实施例一:
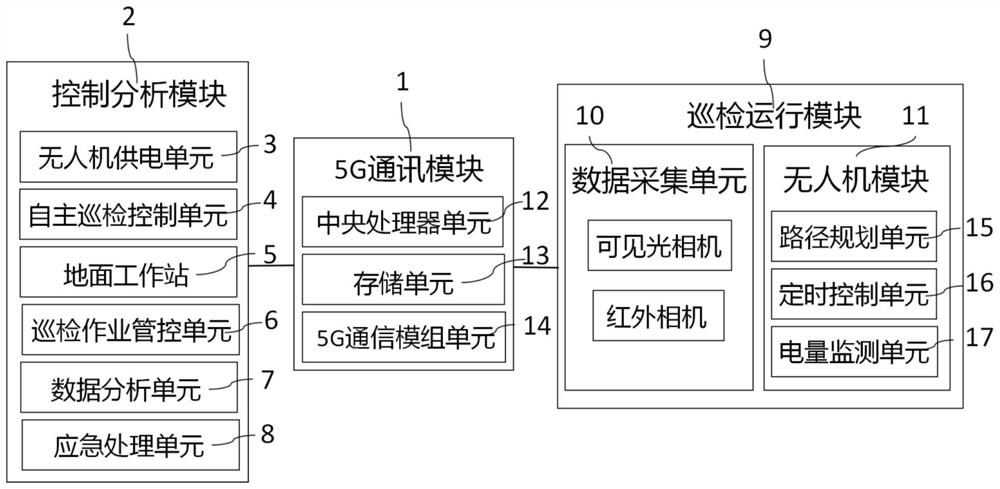
请结合参阅图1,图1为本发明提供的一种基于5G通信的无人机自主巡检系统的第一实施例的结构框图,一种基于5G通信的无人机自主巡检系统,包括:巡检运行模块9以及采用5G通讯模块1与巡检运行模块连接的控制分析模块2,巡检运行模块9包括数据采集单元10和无人机模块11;数据采集单元10的输出端与巡检运行模块9的输入端双向连接;数据采集单元10通过可见光相机以及红外相机进行同时工作进行数据采集工作,从而能够获得多种图像数据信息。
无人机模块11的输出端与巡检运行模块9的输入端双向连接,巡检运行模块9的输入端通过5G通讯模块1与控制分析模块2双向连接,控制分析模块2包括无人机供电单元3和地面工作站5,无人机供电单元3的输出端双向连接有自主巡检控制单元4,地面工作站5的输出端双连接有巡检作业管控单元6,巡检作业管控单元6的输出端双向连接有数据分析单元7,数据分析单元7的输出端双向连接有应急处理单元8。
5G通讯模块1包括中央处理器单元12、存储单元13和5G通信模组单元14,中央处理器单元12分别与存储单元13和5G通信模组单元14双向连接。
无人机模块11包括路径规划单元15,路径规划单元15的输出端双向连接有定时控制单元16,定时控制单元16的输出端双向连接有电量监测单元17。
本发明提供的一种基于5G通信的无人机自主巡检系统的工作原理如下:
通过启动控制分析模块2中的无人机供电单元3对其巡检运行模块9中的无人机模块11进行通电,再通过无人机模块11中的路径规划单元15以及自主巡检控制单元4对其无人机模块11的飞行路径进行规划并控制其无人机模块11进行飞行即可。
在无人机模块11进行飞行时,通过地面工作站5以及巡检作业管控单元6对其无人机模块11进行飞行控制,再通过巡检运行模块9的工作,从而使其数据采集单元10进行工作,再使其数据采集单元10带动其可见光相机以及红外相机进行工作,对其输电通道进行巡检配合着5G通讯模块1对其所采集的数据进行实时传输到数据分析单元7中,再通过数据分析单元7进行分析即可,当其数据分析单元7分析出问题时进行反馈给地面工作站5即可。
当其无人机模块11在工作中出现故障时,通过应急处理单元8进行控制无人机模块11按照原路线进行返航工作即可,同时可在无人机模块11进行工作时启动定时控制单元16进行控制其无人机模块11进行自主巡检到了所规定的时间自行进行返航,而在无人机模块11进行工作时,通过电量监测单元17对其无人机供电单元3进行实时监测,避免因电量过低而无法正常工作,甚至无法返航。
与相关技术相比较,本发明提供的一种基于5G通信的无人机自主巡检系统具有如下有益效果:
通过巡检运行模块9中的数据采集单元10和无人机模块11和5G通讯模块1以及控制分析模块2之间的相互配合,能够方便地对特高压输电通道进行远距离、长航时自主巡检,巡检画面可以实时回传,及时发现特高压输电通道的缺陷问题,操作简单方便,提高了工作效率和管理水平。
第二实施例
请结合参阅图2、图3和图4,基于本申请的第一实施例提供的一种基于5G通信的无人机自主巡检系统,本申请的第二实施例提出另一种基于5G通信的无人机自主巡检系统。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
具体的,本申请的第二实施例提供的一种基于5G通信的无人机自主巡检系统的不同之处在于,一种基于5G通信的无人机自主巡检系统,无人机模块11为无人机实体且四周均开设有两个第一滑槽18,两个所述第一滑槽18的内部滑动连接有第一滑块19,第一滑块19的顶部且位于两个所述第一滑槽18的内部设置有第一弹簧20。
第一滑块19的正面转动连接有顶杆21。
两个第一滑槽18的顶部转动连接有支撑杆22,支撑杆22的两侧与所述顶杆21的另一端转动连接。
顶杆21的内侧固定连接有连接杆23。
通过连接杆23从而能够将其同一侧的两个顶杆21进行相互连接在一起,从而能够使其两个顶杆21在拉动第一滑块19时为同步的状态,从而能够提高其支撑杆22和顶杆21工作的稳定性以及流畅性。
支撑杆22的底部转动连接有底板24,底板24的两侧均固定安装有纵向接地结构25。
纵向接地结构25包括贯穿孔251,贯穿孔251的内部设置有限位杆252,限位杆252的表面且位于底板24的底部设置有第二弹簧253。
贯穿孔251开设在底板内部的两侧,限位杆252从底板24的底部贯穿整个贯穿孔251到达底板24的顶部和连接板27进行固定安装。
限位杆252的底部固定安装有滚动轮26。
限位杆252的顶部固定安装有连接板27。
通过连接板27对其限位杆252进行限位从而能够避免其限位杆252脱离处于贯穿孔251的内部,从而能够提高其纵向接地结构25的工作稳定性。
本发明提供的一种基于5G通信的无人机自主巡检系统的工作原理如下:
当其无人机在地面时会使其滚动轮26和地面第一时间接触,通过滚动轮26和地面的接触并随着无人机逐渐的下落而导致其滚动轮26受力越来越重,通过滚动轮26的受力从而向上推动其纵向接地结构25中的限位杆252受力在贯穿孔251重进行向上移动,再通过限位杆252的移动从而挤压第二弹簧253,使其第二弹簧253发生弹性形变,当其限位杆252进行向上移动的同时带动连接板27和底板24进行移动。
当其滚动轮26受力时会向外侧进行滚动,再通过滚动轮26的滚动从而向外侧带动其纵向接地结构25进行受力向外侧移动,从而带动支撑杆22受力向外侧转动,再通过支撑杆22的转动向外侧张开时,从而会带动其顶杆21受力从而带动第一滑块19在第一滑槽18中向上移动,再通过第一滑块19的移动从而挤压第一弹簧20,促使其第一弹簧20发生弹性形变,通过第一弹簧20以及第二弹簧253的弹性形变从而对其无人机在和地面接触时进行缓冲即可。
与相关技术相比较,本发明提供的一种基于5G通信的无人机自主巡检系统具有如下有益效果:
通过纵向接地结构25以及第一滑块19、第一弹簧20和支撑杆22、底板24等之间的配合工作从而使其无人机在下降落地时,不会因为突然的失去动力,或者无人机在和地面接触时出现抖动而导致其无人机无法平稳的落在地面上,到翻倒或者因为震动而出现连接零部件松散,导致其出现损坏,从而能够提高其无人机落地的稳定性和使用寿命。
第三实施例
请结合参阅图5,基于本申请的第一实施例提供的一种基于5G通信的无人机自主巡检系统,本申请的第三实施例提出另一种基于5G通信的无人机自主巡检系统。第三实施例仅仅是第一实施例优选的方式,第三实施例的实施对第一实施例的单独实施不会造成影响。
具体的,本申请的第三实施例提供的一种基于5G通信的无人机自主巡检系统的不同之处在于,一种基于5G通信的无人机自主巡检系统,所述连接板27顶部转动连接有螺纹杆33,所述螺纹杆33的表面套设有螺纹块34,所述螺纹块34的两侧转动连接有联动杆37。
螺纹杆33和螺纹块相适配,螺纹杆33的顶部固定安装有转动盘,通过转动盘从而方便工作人员对其螺纹杆进行转动操作。
所述连接板27顶部的两侧均开设有第二滑槽29,所述第二滑槽29的内部滑动连接有第二滑块30,所述第二滑块30的顶部固定安装有固定块31,所述固定块31的外侧固定安装有插接杆32,所述限位杆252内侧的顶部开设有卡槽28。
卡槽28和插接杆32相适配,从而能够对其限位杆252进行位置固定不可在固定的期间而出现脱离或者晃动的情况。
本发明提供的一种基于5G通信的无人机自主巡检系统的工作原理如下:
当根据实际的情况将其纵向接地结构25取下时,通过手动的转动螺纹杆33,通过螺纹杆33的转动从而促使其套设在螺纹杆33表面的螺纹块34在螺纹杆33的表面进行向上移动,再通过螺纹块34的移动从而拉动其联动杆37进行移动,再通过联动杆37移动所产生的角度变化向内侧进行拉动固定块31受力,再通过固定块31的受力移动从而带动其第二滑块30,使其第二滑块30在第二滑槽29中向内侧进行移动,再通过固定块31的移动从而带动插接杆32进行移动,从而促使其插接杆32脱离和卡槽28之间的卡接状态,从而促使其限位杆252和连接板27之间失去被固定安装在一起的状态,再通过向下拉动限位杆252,使其和连接板27分离即可,从而将其取下即可。
与相关技术相比较,本发明提供的一种基于5G通信的无人机自主巡检系统具有如下有益效果:
通过转动螺纹杆33促使其螺纹块34向上移动,从而拉动其联动杆37受力带动固定块31移动并使其第二滑块30在第二滑槽29中进行移动,从而带动其插接杆32进行移动脱离和卡槽28之间的卡接状态,从而使其纵向接地结构25进行取下,根据实际的使用情况进行使用,从而能够更加方便的进行储存。
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
- 一种基于5G+北斗的无人机智能巡检系统及巡检方法
- 一种基于5G通信的无人机电力巡检方法及装置