一种风光耦合离网电解制氢系统的功率控制方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及微电网技术、分布式发电技术、制氢技术领域,特别涉及一种风光耦合离网电解制氢系统的功率控制方法。
背景技术
近年来,随着全球变暖等环境恶化现象的增多,各国对碳排放的指标要求愈发苛刻。为了实现可持续发展,分布式能源技术得到发展,风能、光能等清洁能源的使用也大大减少了传统石油、天然气的能量占比,在一定程度上缓解了能源危机。采用清洁能源制取氢气,可实现从制备到使用全过程的闭环无污染,这种能量转换方式可减少有害气体排放,改善空气质量,符合可持续发展与减排目标。但由于风能、光能等可再生能源的间歇性与随机性,大规模接入电网会引起电网电压的波动,恶化电能质量。为了解决新能源功率并网问题,微电网技术应运而生。
微电网是一种将分布式电源、储能系统、负载等部件通过接口变换器整合在一起的微型供电系统。微电网可并网运行,也可孤岛直流运行,具体运行方式可根据实际需要选择。根据母线类型,微电网可分为交流微电网和直流微电网。与交流微电网相比,直流微电网无需考虑无功功率与频率,因此直流微电网的电压跟随控制易于实现,系统的稳定性也可得到保证。此外,微电网中的光伏、储能单元均为直流微源,与此同时,碱式电解槽、电动汽车等直流负荷越来越普遍。若将上述微源、负荷接入交流微电网系统,则需要级联DC/DC变换器与DC/AC变换器,如此势必会降低能量转换效率,增加系统控制难度;与之相反的是,若接入直流微电网系统中,则接入一级DC/DC变换器即可,能大大提升能量转换效率,同时简化系统结构、提高系统的稳定性。
基于上述背景,直流微电网以其高效性与可靠性愈发得到学术界、工业界关注。在直流微电网系统中,母线电压是衡量系统稳定运行的关键指标,源与负荷的不平衡功率会引起电压的上升或者跌落,同时分布式能源的间歇性也会引起母线电压波动。在微电网系统中,加入储能装置和采用合理的控制策略均能平抑母线功率波动,提高系统可靠性和供电质量。目前,为了解决电压波动问题,国内外学者已经做了大量工作,已有相关文献进行研究并提出直流母线电压控制方法,例如:
1、张凯涛等人在申请号为202010878014.9,名称为“孤岛光储直流微电网模式自适应方法”的中国专利申请中,通过实时监测母线电压,实现在母线电压不同阶段时对系统的控制,包括母线电压超过第一预设电压时,采用光伏单元的母线电压控制环路控制电压;母线电压在第二预设电压时,储能单元对母线电压进行控制;母线电压低于第三预设电压,进入过载区,母线电压持续下降。该方法虽然考虑了储能系统的充放电条件以及母线电压的分段控制,但是当母线电压低于第三预设电压时,没有采取措施进行母线电压控制,致使在负载突然变化时,母线电压波动范围大,不能保证系统稳定运行。此外,由于光伏单元本身的间歇性,在光照强度发生变化时,必然引起母线电压变化,不适合对母线电压进行控制。
2、在题为“孤岛直流模式下光储交流微电网能量管理协调控制策略”文章中,作者温素芳利用锂电池为主源建立母线电压支撑,光伏单元根据微电网内部能量关系,工作在最大功率跟踪或限功率负载匹配模式,同时采用负载投、切控制可避免电池过放。但此控制策略有如下问题:当电池不能吸收多余功率时,光伏多余功率将被舍弃,存在弃光现象;系统使用交流母线,能量转换效率低;此外,对碱式电解槽类负载,不能频繁投切,因此该控制策略对碱式电解槽制氢系统不具有适用性。
3、在X.Xiaowen等人发表的“Modeling and Coordinated Control of Island DCHybrid System of Wind/PV/Electrolyzer and BESS”,2021 International Conferenceon Power System Technology(POWERCON),2021,pp.1117-1122中,提出一种新的分层控制策略,在底层使用分布式控制,实现了底层设备的自主控制;在顶层采用电力监督控制,保证源和负载功率平衡。但是该控制策略在源侧功率超过碱式电解槽与电池功率之和时,选择限制源侧输入功率,存在弃风、弃光现象;另外该文章建立的系统未考虑风能和光伏的间歇性,也未考虑碱式电解槽的动态响应时间,过于依赖碱式电解槽的调节能力,当电源和负载功率瞬间不平衡时系统将无法按原策略运行。与此同时,此系统电池充放电功率波动较大,对电池寿命有一定影响。
发明内容
有鉴于此,本发明的目的是提供一种风光耦合离网电解制氢系统的功率控制方法,以解决风光耦合离网母线电压波动、碱式电解槽单元控制以及储能系统SOC的保护与恢复等技术问题。
本发明风光耦合离网电解制氢系统的功率控制方法包括以下步骤:
步骤1:对风光耦合离网电解制氢系统的底层控制器设计输出控制方程,所述风光耦合离网电解制氢系统包括直流母线、分布式发电单元、储能单元、电解水制氢单元和卸荷单元;所述储能单元包括锂电池和连接锂电池与直流母线的双向DC/DC变换器;所述电解水制氢单元包括碱式电解槽和连接碱式电解槽与直流母线的单向DC/DC变换器;所述卸荷单元包括卸荷电阻和连接卸荷电阻与直流母线的斩波器,所述斩波器包括开关管和二极管,根据设计的控制方程控制风光耦合离网电解制氢系统中的DC/DC变换器:
a、储能单元的双向DC/DC变换器的控制采用双闭环PI控制,外环为电压环,内环为电流环;外环PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,外环PI控制器的输出端连接选择器D
当锂电池满足母线电压支撑条件时,内环输入基准由外环产生,即D
式中,V
b、电解水制氢单元的单向DC/DC变换器的控制也采用双闭环PI控制,外环为电压环,内环为电流环;外环PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,采用二级开关选择器进行内环电流基准的选取,外环PI控制器的输出端连接第一级选择器,第二级选择器与内环PI控制器的输入端连接,内环PI控制器对电解水制氢单元的单向DC/DC变换器的开关管输出驱动信号;第一级选择器为S
式中,V
c、卸荷单元的控制采用单环PI控制,PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,PI控制器对卸荷单元的开关管输出驱动信号,卸荷单元的控制方程为;
式中,d
步骤2:按如下策略控制风光耦合离网电解制氢系统的运行:
当分布式发电单元的发电功率并入直流母线时,上层控制器根据源侧功率与锂电池的SOC状态为底层控制器提供开关状态,即为储能单元的双向DC/DC变换器的选择器D
情况一:当输入功率小于碱式电解槽额定功率的30%,且锂电池的SOC高于下限值时,锂电池满足母线电压支撑条件,碱式电解槽工作在其额定功率的30%,储能单元对碱式电解槽提供缺额功率,此时选择器D
当输入功率小于碱式电解槽额定功率的30%,且锂电池的SOC低于下限值时,锂电池不满足母线电压支撑条件,锂电池不能提供母线电压支撑,此时第二级选择器D
情况二:当输入功率大于碱式电解槽额定功率的30%而小于或等于额定功率时,碱式电解槽此时以输入功率运行,储能单元不工作;此时选择器D
情况三:当输入功率大于碱式电解槽额定功率时,且电池的SOC低于上限值时,碱式电解槽以额定功率运行,储能单元吸收源侧除碱式电解槽额定功率之外的多余功率,此时选择器D
当输入功率大于碱式电解槽额定功率时,且电池的SOC高于或等于上限值时,碱式电解槽以额定功率运行,储能单元不能吸收源侧除碱式电解槽额定功率之外的多余功率,选择器D
进一步,所述的锂电池的SOC上限值为80%,SOC下限值为20%。
进一步,所述分布式发电单元包括风力发电单元和光伏发电单元。
本发明的有益效果:
本发明风光耦合离网电解制氢系统的功率控制方法,不仅可实现使用储能单元、电解水制氢单元和卸荷单元对微电网电解制氢系统的母线电压进行控制:储能单元建立母线电压支撑,电解水制氢单元实施辅助控制,卸荷单元实现超限保护;而且还可实现锂电池SoC的保护与恢复,从而提高储能单元的使用寿命。此外,该控制方法仅在负载侧施加控制,减少了弃风、弃光功率;且卸荷单元消耗的能量可用于实际用途。与此同时,该控制方法充分考虑了系统的暂态响应,利用锂电池、卸荷单元共同协作消纳不平衡功率,维持母线电压稳定,从而能保持系统稳定运行。
附图说明
图1为风光耦合离网制氢系统的功率控制原理框图。其中储能单元采用锂电池组,分布式电源即风机单元和光伏单元,将风光能源转换为电能注入到系统源侧,为整个系统提供输入功率,二者均等效为电流源,即以I
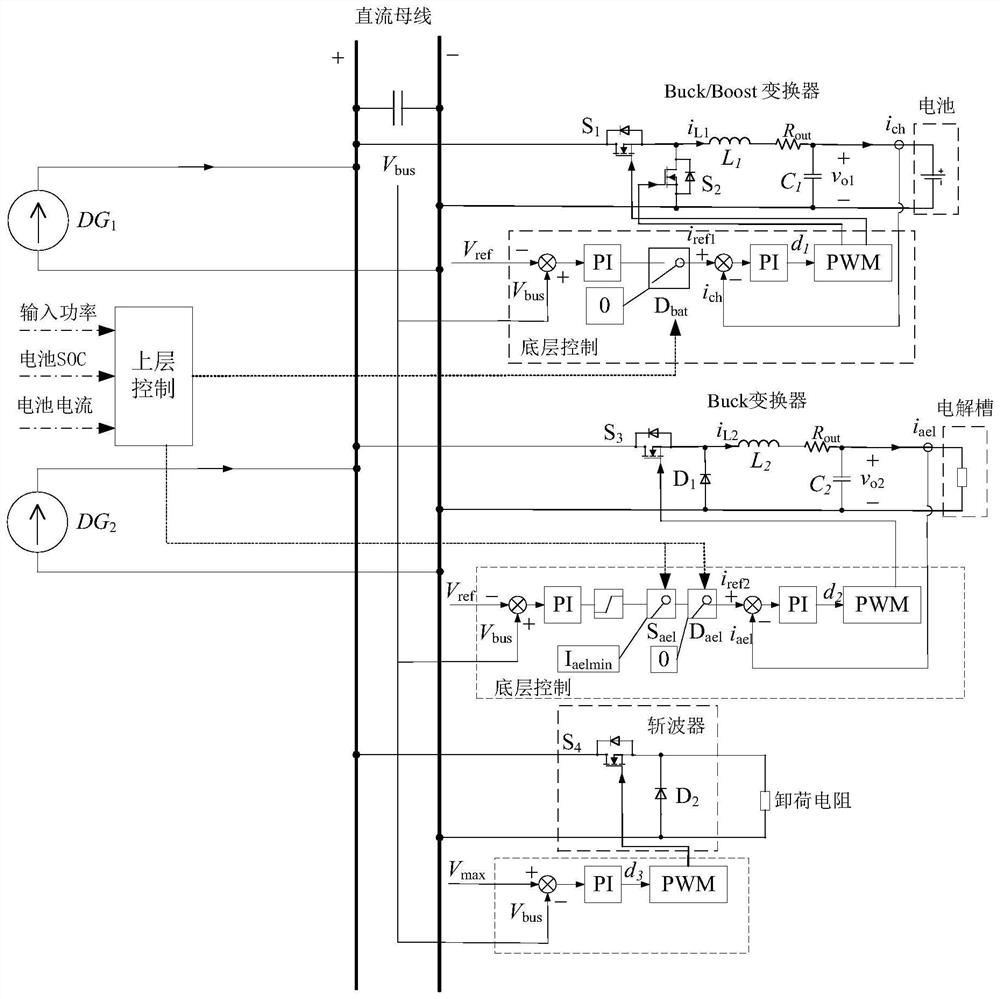
图2为实施例中所述的风光耦合离网制氢系统的简化电路图。分布式发电单元有DG
图3为储能单元的双向DC/DC变换器的控制器的控制原理图。
图4为电解水制氢单元的单向DC/DC变换器的控制器的控制原理图。
图5为上层控制器运行控制策略。其中P
图6为当输入功率小于电解槽额定功率30%时,系统仿真结果图。
图7为当输入功率大于电解槽额定功率30%而小于电解槽额定功率时,系统仿真结果图。
图8为当输入功率大于电解槽额定功率时,系统仿真结果图。
具体实施方式
下面结合附图和实施例对本发明作进一步描述。
本实施例中风光耦合离网电解制氢系统的功率控制方法,其特征在于:包括以下步骤:
步骤1:对风光耦合离网电解制氢系统的底层控制器设计输出控制方程。如图1所示,所述风光耦合离网电解制氢系统包括直流母线、分布式发电单元、储能单元、电解水制氢单元和卸荷单元。本实施例中,所述分布式发电单元包括风力发电单元和光伏发电单元;当然在不同实施例中,所述分布式发电单元还可为风力发电单元和光伏发电单元中的一种。所述储能单元包括锂电池和连接锂电池与直流母线的双向DC/DC变换器;所述电解水制氢单元包括碱式电解槽和连接碱式电解槽与直流母线的单向DC/DC变换器;所述卸荷单元包括卸荷电阻和连接卸荷电阻与直流母线的斩波器,所述斩波器包括开关管和二极管。根据设计的控制方程控制风光耦合离网电解制氢系统中的DC/DC变换器:
a、储能单元的双向DC/DC变换器的控制采用双闭环PI控制,外环为电压环,内环为电流环;外环PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,外环PI控制器的输出端连接选择器D
当锂电池满足母线电压支撑条件时,内环输入基准由外环产生,即D
式中,V
b、电解水制氢单元的单向DC/DC变换器的控制也采用双闭环PI控制,外环为电压环,内环为电流环;外环PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,采用二级开关选择器进行内环电流基准的选取,外环PI控制器的输出端连接第一级选择器,第二级选择器与内环PI控制器的输入端连接,内环PI控制器对电解水制氢单元的单向DC/DC变换器的开关管输出驱动信号;第一级选择器为S
式中,V
在本实施例中,碱式电解槽为系统的主要负载,碱式电解槽额定功率为816kW,通过控制电解槽来实现离网系统制氢。碱式电解槽的电化学方程为:
式中,U
由电解槽的电化学方程可知,其电压等级与电流相关,因此可通过控制电流来控制电解槽运行。由于电解槽其所具有的特性:碱式电解槽启动时间与停机时间较长,而且其频繁启停会影响电解槽的寿命,此外,电解槽制氢的纯度与功率相关,若输入功率在额定功率的30%以下,制得的氢气纯度将不合格,从而可能引起安全事故。
c、卸荷单元的控制采用单环PI控制,PI控制器以直流母线电压的标称值和直流母线电压测量值作为输入,PI控制器对卸荷单元的开关管输出驱动信号,卸荷单元的控制方程为;
式中,d
步骤2:按如下策略控制风光耦合离网电解制氢系统的运行:
当分布式发电单元的发电功率并入直流母线时,上层控制器根据源侧功率与锂电池的SOC状态为底层控制器提供开关状态,即为储能单元的双向DC/DC变换器的选择器D
情况一:当输入功率小于碱式电解槽额定功率的30%,且锂电池的SOC高于下限值时,本实施例中锂电池的SOC下限值为20%,锂电池满足母线电压支撑条件,碱式电解槽工作在其额定功率的30%,储能单元对碱式电解槽提供缺额功率,此时选择器D
当输入功率小于碱式电解槽额定功率的30%,且锂电池的SOC低于下限值时,锂电池不满足母线电压支撑条件,锂电池不能提供母线电压支撑,此时第二级选择器D
情况二:当输入功率大于碱式电解槽额定功率的30%而小于或等于额定功率时,碱式电解槽此时以输入功率运行,储能单元不工作;此时选择器D
情况三:当输入功率大于碱式电解槽额定功率时,且电池的SOC低于上限值时,碱式电解槽以额定功率运行,储能单元吸收源侧除碱式电解槽额定功率之外的多余功率,此时选择器D
当输入功率大于碱式电解槽额定功率时,且电池的SOC高于或等于上限值时,碱式电解槽以额定功率运行,储能单元不能吸收源侧除碱式电解槽额定功率之外的多余功率,选择器D
下面对本实施例中风光耦合离网电解制氢系统的功率控制方法的有效性进行仿真验证。
图6为输入功率小于电解槽额定功率30%时系统的仿真结果。上述提到本实例中电解槽额定功率为816kW,选取其最低制氢功率为243kW,即为电解槽额定功率的30%。在仿真系统中,本实例采用状态平均方程建模,与普通建模方法不同的是,此方法仿真速度快,电池SOC能够在仿真过程中大幅度改变,本实例选取仿真时间为9000s,每隔3000s进行功率跳变。在输入功率小于243kW时,根据控制策略,采集电池SOC状态,判断SOC是否小于20%,若小于则输入功率用于电池充电,充电功率即为输入功率,电解槽不工作。若SOC大于20%,判断上一状态电池的状态,若电池处于放电状态则电解槽工作在额定功率的30%,电池补充缺额功率,直到电池SOC放电到20%,若到达20%后输入功率依旧小于电解槽最低制氢功率则输入功率尽数用于电池充电;若电池处于充电状态则输入功率用于电池充电,电解槽待机。在图6的阶段1,此时输入功率为100kW,可知输入功率小于最小制氢功率,电池SOC初始值为40%(开始状态电池放电),那么电解槽工作在额定功率的30%,电池放电。当电池放电到SOC下限值20%时,无法继续放电支撑电解槽工作,因此电解槽待机,输入功率尽数用于电池充电,充电功率为100kW。在仿真时间3000s时进入阶段2,输入功率跳变为200kW,根据控制策略此时SOC大于20%,但是上一状态电池处于充电状态,因此电池依旧充电,充电功率为200kW,充电速度增加,表现为电池SOC上升幅度增加。当电池充电到上限值80%时,电解槽工作在最小制氢功率,电池补充缺额功率43kW。在仿真时间为6000s时进入阶段3,输入功率变为150kW,此时电池SOC未达到下限值20%且电池上一状态处于放电状态,在这一阶段,电解槽工作在最低制氢功率,电池放电,放电功率为93kW,与前一阶段相比,电池提供缺额功率增多50kW,在图中表现为SOC下降速率增加。此外,在整个仿真过程中,风光储制氢系统的母线电压稳定在设定值1050V,只是在功率切换或者到达SOC上下限值时偶有波动,但波动范围在性能指标要求内,实现了系统的稳定运行,验证了本发明风光储制氢系统控制方法的有效性。
图7为输入功率大于电解槽额定功率30%而小于电解槽额定功率时系统的仿真结果。根据运行控制策略,在此功率等级区间电池不工作,电池SOC不变化,电解槽工作功率为输入功率。从图像中分析,在仿真时间为3000s时,系统输入功率为600kW,电池SOC维持在初始值40%,电解槽功率为600kW。在3000s时系统输入功率突变为400kW,电解槽功率随之下降为400kW,电池SOC不变。在仿真时间为6000-9000s时,系统进入阶段3,输入功率上升为700kW,电解槽功率随之上升,电池SOC依旧为40%。此外,在仿真的三个阶段,系统的直流母线电压稳定在1050V,锂电池功率为0,即电池既不充电也不放电,表明系统稳定运行,验证了系统控制方法的有效性。
图8为输入功率大于电解槽额定功率时系统的仿真结果。根据运行控制策略,当源侧输入功率大于电解槽额定功率时,电解槽工作在额定功率816kW,若电池SOC小于80%,则电池吸收源侧输入功率除去电解槽额定功率之外的多余功率,若多余功率超过电池最大吸纳功率,卸荷单元工作,而当电池SOC大于80%时,电池功率为0,卸荷单元吸收多余功率。从图像中分析,在仿真时间为0-3000s时,系统输入功率为1000kW,电解槽功率为816kW,电池SOC初始值为40%,因SOC小于上限值80%,系统盈余功率用于电池充电,电池充电功率为184kW。在将近1800s时电池充电至SOC的80%,此时电池不能再吸收盈余功率,母线电压上升超过1070V,卸荷单元工作,将电压控制在1070V,多余功率消纳在卸荷电阻上,将电能转化为热能。在3000s时系统输入功率突变为2000kW,电解槽功率稳定在额定功率816kW,卸荷单元功率变为1184W,电池SOC保持在80%不变。在仿真时间为6000-9000s时,系统进入阶段3,输入功率下降为1000kW,电解槽功率稳定在额定功率816kW,卸荷单元功率为184kW,电池SOC不变。此外,在仿真的三个阶段,系统直流母线电压在SOC到达80%后从1050V升到1070V,其余状态保持恒定,且功率分配符合预期,表明系统稳定运行,验证了系统控制方法的有效性。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种风光储耦合离网制氢微电网系统的容量优化配置方法
- 一种直流耦合光伏离网制氢系统及其控制方法