一种自动穿戴手套设备
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及医疗设备技术领域,具体的说,涉及一种自动穿戴手套设备。
背景技术
在医用场景下,一次性手套作为消耗品被大量使用,但是穿戴过程有可能造成二次污染,携带其他微生物病菌,影响安全使用。因此,为了防止在穿戴过程中,造成污染,需要设计一种自动穿戴设备,在穿戴过程中避免手部接触手套外表面。
发明专利内容
为了解决上述技术问题,本发明提供了一种自动穿戴手套设备,通过连杆结构驱动吸盘抓手旋转,通过磁力抓取套设于套口支架的手套并将手套套设于支撑杆上,结构简单。
本发明解决技术问题采用如下技术方案:
一种自动穿戴手套设备,包括箱体、设置于箱体的穿戴装置和抓取装置;所述箱体设置有送料口,用于放入套设于套口支架的手套;所述穿戴装置包括穿戴孔、第一驱动机构和至少三个支撑杆,所述支撑杆的第一端设置于穿戴孔内,所述第一驱动机构连接于支撑杆,能够驱动支撑杆沿着穿戴孔的径向移动;所述穿戴孔设置有手套吹开装置;所述抓取装置包括第二驱动机构、第一转轴、转盘和吸盘抓手,所述第一转轴固定设置于箱体内,所述转盘转动连接于第一转轴;所述第二驱动机构包括推杆、连接板和衔接杆,所述推杆能够沿其延伸方向移动,所述连接板设置于推杆的输出端,所述衔接杆的第一端通过第二转轴铰接于连接板,第二端通过第三转轴铰接于转盘;所述吸盘抓手通过连接杆固定连接于转盘,所述吸盘抓手设置有磁力吸附装置,用于吸附套口支架;所述第二驱动机构能够驱动吸盘抓手沿第一路径转动朝向穿戴孔。
进一步地,所述磁力吸附装置为磁铁,所述设备还包括设置于箱体内的碰撞板,所述碰撞板设置于远离穿戴孔的一侧,所述第二驱动机构能够驱动吸盘抓手沿第二路径转动至碰撞板,所述碰撞板用于碰撞套口支架,使套口支架从吸盘抓手脱落,使吸盘抓手释放套口支架后可以吸附下一个手套的套口支架。
进一步地,所述磁力吸附装置为具有通断功能的电感线圈,所述电感线圈套设于吸盘抓手上,通过电感线圈使吸盘抓手产生磁性或者消除磁性,便于吸附或者释放套口支架。
进一步地,所述第一驱动机构包括控制器、电机、相啮合的第一锥齿轮和第二锥齿轮,所述第一锥齿轮套设于穿戴孔外,所述第二锥齿轮连接于电机的输出端;所述第一锥齿轮的端部设置有第一阿基米德螺纹槽,每个所述支撑杆的第二端设置有滑块,所述滑块设置有与第一阿基米德螺纹槽相适配的第二阿基米德螺纹槽;所述电机电连接于控制器,通过控制器控制电机的启停和转动方向,从而张开或者合拢支撑杆。
进一步地,所述支撑杆和穿戴孔内壁之间设置第一红外线感应器,所述第一红外线感应器包括第一红外线发射器和第一红外线接收器,所述第一红外线发射器和第一红外线接收器分别设置于支撑杆和穿戴孔内壁,第一红外线接收器电连接于控制器,使第一红外线感应器检测支撑杆上是否套设手套,从而向控制器发送夹紧信号;所述穿戴孔内设置有第二红外线感应器,第二红外线感应器包括第二红外线发射器和第二红外线接收器,第二红外线发射器设置于穿戴孔内壁的一侧,第二红外线接收器设置于穿戴孔内壁的相对侧,所述第二红外线接收器电连接于控制器,使第二红外线感应器检测是否需要穿戴手套,从而向控制器发送松开信号。
进一步地,所述手套吹开装置为鼓风管,所述鼓风管沿穿戴孔内壁延伸,其出风口朝向穿戴孔的内侧端口;或者,所述手套吹开装置为支撑杆,所述支撑杆为空心管状,其第一端的端部具有通风口;或者,所述手套吹开装置为负压腔,所述负压腔与穿戴孔连通,通过手套内外压差使手套内部张开,避免内壁贴合,便于穿戴。
进一步地,所述转盘下方设置有存放箱,所述存放箱的内侧具有朝向抓取装置的开口;所述送料口设置有第一盖部,所述第一盖部为密封塞,所述密封塞上固定连接有把手;所述穿戴孔设置有第二盖部,所述第二盖部为自动感应门,提高设备的密封性,避免与外界环境接触,尽量减少污染。
进一步地,所述设备还包括回收箱;当所述磁力吸附装置为磁铁时,所述回收箱设置于碰撞板下方;或者,当所述磁力吸附装置为电感线圈时,所述回收箱设置于穿戴孔与存放箱之间,便于存放释放的套口支架,并取出。
进一步地,所述设备还包括套口支架,所述套口支架具有能够被磁力吸附的金属盘和连接于金属盘的撑开部;所述撑开部为撑开环或者撑开爪,所述撑开爪至少为呈三角形布置的三个,可以从手套外部撑开套口部位,便于打开套口部位,从套口部位套在支撑杆上。
进一步地,所述推杆为两个,优选地,所述推杆为电动推杆或者气缸;所述连接板的中部具有朝向第一转轴方向延伸的支板,所述衔接杆的第一端通过第二转轴铰接于支板,可以稳定推动转盘旋转。
进一步地,所述连接杆为伸缩结构;优选地,所述连接杆为电动推杆或者气缸,提高操作的便捷性,可以使连接杆根据需要伸缩。
与现有技术相比,本发明的有益效果在于:
(1)该设备结构简单,对于使用人员的技术性要求低,设备自动化程度高,操作方便,穿戴成功率处于较高水准。
(2)吸盘抓手设置有磁力吸附装置,通过磁力和套口支架配合对手套进行抓取,抓取装置结构简单,吸附稳定,并能够方便释放套口支架。
(3)手套存放箱的仓储体积方便拓展,柔性空间较大,可以根据目标定位进行扩容。
附图说明
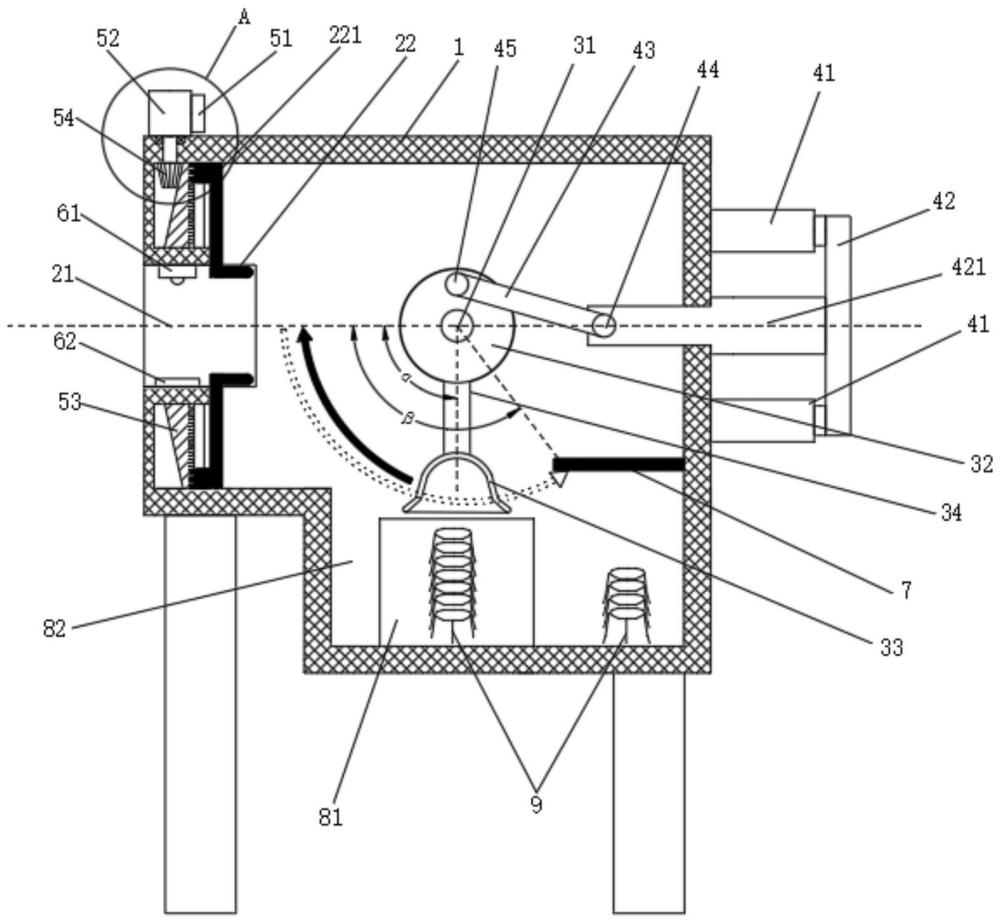
图1为本发明自动穿戴手套设备的第一实施例结构示意图。
图2为本发明自动穿戴手套设备的第二实施例结构示意图。
图3为本发明A处放大图结构示意图。
图中:1-箱体;21-穿戴孔;22-支撑杆;221-滑块;2211-第二阿基米德螺纹槽;31-第一转轴;32-转盘;33-吸盘抓手;34-连接杆;41-推杆;42-连接板;421-支板;43-衔接杆;44-第二转轴;45-第三转轴;51-控制器;52-电机;53-第一锥齿轮;531-第一阿基米德螺纹槽;54-第二锥齿轮;61-第二红外线发射器;62-第二红外线接收器;7-碰撞板;81-存放箱;82-回收箱;9-套口支架。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本发明进一步详细说明。
在本发明的描述中,需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。另外,需要说明的是,术语“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
本实施例提供了一种自动穿戴手套设备,参考图1和图3所示,包括箱体1、设置于箱体1的穿戴装置和抓取装置,所述箱体1设置有送料口,用于放入套设于套口支架9的手套。所述穿戴装置包括穿戴孔21、第一驱动机构和至少三个支撑杆22,所述支撑杆22的第一端设置于穿戴孔21内,所述第一驱动机构连接于支撑杆22,能够驱动支撑杆22沿着穿戴孔21的径向移动,撑开手套的套口部位。所述抓取装置包括第二驱动机构、第一转轴31、转盘32和吸盘抓手33,所述第一转轴31固定设置于箱体1内,所述转盘32转动连接于第一转轴31;所述第二驱动机构包括推杆41、连接板42和衔接杆43,所述推杆41能够沿其延伸方向移动,所述连接板42设置于推杆41的输出端,所述衔接杆43的第一端通过第二转轴44铰接于连接板42,第二端通过第三转轴45铰接于转盘32,这样,推杆41、连接板42、衔接杆43和转盘32就构成了连杆结构,可以通过推杆41的移动带动转盘32转动。优选地,所述推杆41为两个,所述推杆41可以使用电动推杆41或者气缸。所述连接板42的中部具有朝向第一转轴31方向延伸的支板421,所述衔接杆43的第一端通过第二转轴44铰接于支板421,可以稳定推动转盘32旋转。所述吸盘抓手33通过连接杆34固定连接于转盘32,转盘32转动时,可以带动吸盘抓手33转动。所述吸盘抓手33设置有磁力吸附装置,用于吸附套口支架9,从而抓取手套。具体地,所述磁力吸附装置为磁铁,结构简单,可以有效吸附套口支架9。所述第二驱动机构能够驱动吸盘抓手33沿第一路径转动朝向穿戴孔21,支撑杆22的第一端朝向穿戴孔21的内侧端口,此时,支撑杆22的第一端朝向吸盘抓手33抓取的手套的套口部位,可以将手套的套口部位套于支撑杆22上,便于穿戴。
具体地,参考图1和图3所示,所述第一驱动机构包括控制器51、电机52、相啮合的第一锥齿轮53和第二锥齿轮54,所述第一锥齿轮53套设于穿戴孔21外,所述第二锥齿轮54连接于电机52的输出端,电机52带动第二锥齿轮54转动,从而带动第一锥齿轮53转动。所述第一锥齿轮53的端部设置有第一阿基米德螺纹槽531,每个所述支撑杆22的第二端设置有滑块221,所述滑块221设置有与第一阿基米德螺纹槽531相适配的第二阿基米德螺纹槽2211。通过吸盘抓手33将手套输送到穿戴孔21,并将手套的套口部位套设于支撑杆22上。所述支撑杆22大致为Z字形,当第一锥齿轮53转动时,支撑杆22第二端的滑块221可以沿着第一阿基米德螺纹槽531移动,从而使支撑杆22沿着穿戴孔21的径向运动,使支撑杆22的第一端张开或者合拢。支撑杆22的第一端基本平行于穿戴孔21的内壁,当支撑杆22合拢时,可以方便套设上手套,当支撑杆22张开时,可以撑开手套的套口部位,便于手部伸入。优选地,支撑杆22张开时,将手套抵在穿戴孔21的内壁上,使手套夹持牢固,防止脱落。所述支撑杆22至少为三个,沿三角形布置,可以撑开能够让手部伸入的空间,所述支撑杆22也可以为四个、五个、六个、七个、八个等,沿圆心位于穿戴孔21的轴线上的圆周均匀布置,可以使支撑杆22尽量撑开套口部位。优选地,所述支撑杆22位于穿戴孔21内的第一端为圆杆结构,圆杆的端部为球冠,使支撑杆22与手套接触时可以避免划破手套。所述电机52电连接于控制器51,通过控制器51控制电机52的启停和转动方向,当需要夹紧手套时,控制器51控制电机52转动,驱动支撑杆22张开,当需要松开手套时,控制器51控制电机52反方向转动,驱动支撑杆22合拢。
所述支撑杆22和穿戴孔21内壁之间设置第一红外线感应器,所述第一红外线感应器包括第一红外线发射器和第一红外线接收器,所述第一红外线发射器和第一红外线接收器分别设置于支撑杆22和穿戴孔21内壁;第一红外线接收器电连接于控制器51。优选地,可以设置于支撑杆22靠近第一端的自由端的端部位置,为了提高准确性,可以设置多组第一红外线感应器。当支撑杆22上套设手套时,第一红外线感应器检测到手套到位,从而向控制器51发送夹紧信号,控制器51控制电机52运行,驱动支撑杆22张开。所述穿戴孔21内设置有第二红外线感应器,第二红外线感应器包括第二红外线发射器61和第二红外线接收器62,第二红外线发射器61设置于穿戴孔21内壁的一侧,第二红外线接收器62设置于穿戴孔21内壁的相对侧,所述第二红外线接收器62电连接于控制器51,当将手臂伸入穿戴孔21穿戴手套时,第二红外线感应器检测到需要穿戴手套,从而向控制器51发送松开信号,控制器51控制电机52运行,驱动支撑杆22稍向内合拢,释放手套,完成穿戴。通过红外线感应控制,可以进一步提高设备的自动化程度。
为了方便穿戴手套,所述穿戴孔21设置有手套吹开装置,通过手套内外压差使手套内部张开,避免内壁贴合,便于穿戴。可选地,所述手套吹开装置为鼓风管,所述鼓风管沿穿戴孔21内壁延伸,避免妨碍手臂伸入穿戴孔21,其出风口朝向穿戴孔21的内侧端口,可以向手套内部鼓风,吹开手套。可选地,所述手套吹开装置为支撑杆22,所述支撑杆22为空心管状,其第一端的端部具有通风口,可以直接通过支撑杆22向手套内部鼓风,吹开手套,使鼓风管和支撑杆22集成设置,结构更加简单。可选地,所述手套吹开装置还可以为负压腔,所述负压腔与穿戴孔21连通,所穿戴孔21内为正压,当手套被支撑杆22抵紧在穿戴孔21的内壁时,手套的套口朝向穿戴孔21,使手套内部为正压,手套的手掌和手指部位位于负压腔内,这样,在内外压差的作用下,手套自动张开。
所述设备还包括回收箱82,所述磁力吸附装置为磁铁,套口支架9需要通过碰撞板7碰撞回收,所述回收箱82设置于碰撞板7下方,用于放置从吸盘抓手33脱落的套口支架9。所述转盘32下方设置有存放箱81,用于放置套设于套口支架9的手套,所述存放箱81的内侧具有朝向抓取装置的开口,使吸盘抓手33可以吸附套口支架9。优选地,所述存放箱81可以从箱体1内拿出,方便放入手套,所述回收箱82也可以从箱体1内拿出,方便取出套口支架9。具体地,可以在存放箱81和回收箱82处设置相应的盖板,打开相应的盖板可以方便取出存放箱81和回收箱82。手套存放箱81的仓储体积可以根据需要进行拓展,柔性空间较大,可以根据目标定位进行扩容。
优选地,所述送料口设置有第一盖部,所述第一盖部为密封塞,所述密封塞上固定连接有把手,拉动把手,打开密封塞后可以放入手套。所述穿戴孔21设置有第二盖部,优选地,所述第二盖部为自动感应门,需要穿戴手套时,自动感应门可以感应打开,方便伸入手臂,不需要用手接触设备,保持干净卫生。通过设置第一盖部和第二盖部,可以提高设备的密封性,避免与外界环境接触,使手套尽量减少污染。
所述设备还包括套口支架9,所述套口支架9具有能够被磁力吸附的金属盘和连接于金属盘的撑开部;所述撑开部为撑开环或者撑开爪,所述撑开爪至少为呈三角形布置的三个,优选地,所述撑开爪沿同一圆周均匀布置,可以从手套外部撑开套口部位,便于打开套口部位,从套口部位套在支撑杆22上。
该设备可以适用多种一次性手套材质,如乳胶一次性手套、丁腈一次性手套等。在干净无菌的环境中,将手套的套口部位的外侧套设于套口支架9的撑开部,这样就可以将手套的套口部位撑开。每个手套都套设于套口支架9上,将各个套口支架9叠放,从而将多个手套叠放在一起后从送料口放入箱体1内,使吸盘抓手33抓取手套。
需要穿戴手套时,启动设备,优选地,启动开关为脚踏式或者红外线感应式,避免手部与设备接触。设备启动后,推杆41沿第一方向运行,带动连接板42沿第一方向运行,连接板42拉动衔接杆43运行,从而推动转盘32绕第一转轴31沿正时针或者逆时针方向运行。此处,以推杆41沿第一方向伸长时,转盘32绕第一转轴31沿正时针方向转动为例说明。此时,转盘32带动吸附有套口支架9的吸盘抓手33从初始位置按照顺时针方向沿第一路径转动至穿戴位置,朝向穿戴孔21。吸盘抓手33的初始位置为吸盘抓手33朝向套口支架9的竖直位置,穿戴位置为朝向穿戴孔21的水平位置,第一路径大致为以吸盘抓手33到第一转轴31的距离为半径,位于初始位置和穿戴位置之间的圆弧,吸盘抓手33的旋转路径参考图1中黑色箭头所示。吸盘抓手33从初始位置旋转到穿戴位置时,旋转角度为α。当吸盘抓手33旋转到穿戴位置后,将手套的套口部位套设于支撑杆22上,此时,支撑杆22为合拢状态,可以方便地套上手套。当第一红外线感应器检测到支撑杆22上套设上手套后,支撑杆22向外张开,将手套夹紧在支撑杆22和穿戴孔21内壁之间,此时,吸盘抓手33就可以带着套口支架9与手套脱离。手套在内外压差的作用下张开,内壁分离。可以将鼓风机或者负压装置与第一红外线接收器电连接,当第一红外线感应器检测到支撑杆22上套设上手套后才开启鼓风或者负压,节约能源。
自动感应门开启,打开穿戴孔21后,伸入手臂,将手部伸入手套中,第二红外线感应器检测到穿戴信号,向控制器51发送松开信号,控制器51控制电机52反向运行,驱动支撑杆22稍向内合拢,释放手套,支撑杆22大致向内运行3-5cm,避免对手部造成干涉。完成穿戴,拿出手臂后,第二红外线接收器62重新检测到信号,向控制器51发送复位信号,控制器51控制电机52进一步反方向运行,使支撑杆22合拢。手臂从穿戴孔21拿出后,自动感应门关闭,保持箱内的密闭性。该设备结构简单,对于使用人员的技术性要求低,设备自动化程度高,操作方便,穿戴成功率处于较高水准。
在将手套的套口部位套设于支撑杆22后,吸盘抓手33需要释放套口支架9,才能吸附下一个手套的套口支架9,所述设备还包括设置于箱体1内的碰撞板7,用于碰撞套口支架9,使套口支架9从吸盘抓手33脱落。为了防止手套在从初始位置输送到穿戴位置的过程中碰撞掉落,所述碰撞板7设置于远离穿戴孔21的一侧,所述第二驱动机构能够驱动吸盘抓手33沿第二路径转动至碰撞板7,从而将套口支架9碰掉。因此,手套套设于支撑杆22后,推杆41沿第一方向的反方向运行,转盘32带动吸盘抓手33从穿戴位置按照逆时针方向沿第二路径转动至碰撞板7。第二路径大致为以吸盘抓手33到第一转轴31的距离为半径,位于穿戴位置和碰撞板7之间的圆弧,吸盘抓手33的旋转路径参考图1中虚线箭头所示。吸盘抓手33从穿戴位置旋转到碰撞板7时,旋转角度为β,β>α。吸盘抓手33带着套口支架9与手套脱离后先沿第二路径转动到碰撞板7,释放套口支架9,再复位回到初始位置,用于下一次抓取手套。吸盘抓手33通过磁力和套口支架9配合对手套进行抓取,抓取装置结构简单,吸附稳定,并能够方便释放套口支架9。
优选地,所述连接杆34为伸缩结构,所述连接杆34为电动推杆41或者气缸,当吸盘抓手33旋转到穿戴位置时,连接杆34伸长,将手套套设于支撑杆22上,连接杆34再缩短后吸盘抓手33复位,可以提高操作的便捷性,使手套更容易套设于支撑杆22上。抓取手套时,连接杆34伸长,使吸盘抓手33吸附套口支架9后再缩短,这样,随着叠放手套高度的降低,吸盘抓手33仍然能够方便吸附套口支架9。
实施例2
本实施例的其他部件与第一实施例相同,与第一实施例不同的是,所述磁力吸附装置为具有通断功能的电感线圈,所述电感线圈套设于吸盘抓手33上,通过电感线圈使吸盘抓手33产生磁性或者消除磁性,便于吸附或者释放套口支架9。需要穿戴手套时,启动设备,使电感线圈通电,吸盘抓手33产生磁性,可以吸附套口支架9,抓取手套。然后推杆41驱动吸盘抓手33沿第一路径运行到穿戴位置,将手套的套口部位套设于支撑杆22上。吸盘抓手33带着套口支架9与手套分离,仍然沿第一路径复位。本实施例中,所述回收箱82设置于穿戴孔21与存放箱81之间即可,当吸盘抓手33运行到回收箱82上方时,电感线圈断电,吸盘抓手33的磁性消除,套口支架9从吸盘抓手33上掉落到回收箱82中,吸盘抓手33继续旋转回到初始位置,吸盘抓手33的旋转路径参考图2中黑色箭头所示。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种通过可穿戴设备进行支付的方法、装置及可穿戴设备
- 一种用于控制穿戴设备的方法及穿戴设备
- 一种穿戴式设备散热方法、穿戴式设备及可读存储介质
- 一种穿戴设备控制方法、移动终端及穿戴设备
- 一种可穿戴设备及可穿戴设备的信息显示方法及装置
- 一种用于无菌手套穿戴的自动手套机
- 一种医用无菌手套自动穿戴设备