一种双路直流伺服电机驱动系统
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及直流伺服电机技术领域,特别涉及一种双路直流伺服电机驱动系统。
背景技术
电机在现代化的许多方面中起着十分重要的作用,用途也越来越广泛,如工业生产、运动控制技术、医疗卫生、办公设备交通运输、国防、航空航天、机器人技术等方面。有资料统计,现在有百分之九十以上的动力源来自于电机。随着现代化步伐的迈进,自动化的需求越来越高,而电机的复杂控制成为一项系统工程技术,应用领域极为广泛。例如:军事方面的雷达天线、火炮系统、飞船光电池对太阳的跟踪控制,数控机床等各类工业设备。人们对各类电机的驱动、控制方法一直在不断研究中,目前形成了数字与模拟混合控制系统和纯数字控制系统的应用。
直流伺服电机具有体积小、重量轻、抗过载能力强、力矩波动小、低速运行平稳、发热和噪声低等优点,配合角度编码器可实现速度、位置的高精度控制,更能加配减速箱实现单位重量和体积下更高扭矩输出等特点,广泛应用在航空航天、机床、印刷设备、包装设备、纺织设备、激光加工设备、机器人、自动化生产线等对工艺精度、加工效率和工作可靠性等要求相对较高的设备。
当前智能化直流伺服电机驱动器一般为定制产品,功能单一、适应范围小,一个控制模块通常只能控制一台电机等问题,限制了低成本、高集成、智能化、小型化产品的开发。
但是现阶段一个控制模块通常只能控制一台电机。因此有必要提出一种双路直流伺服电机驱动系统实现一个控制模块控制双路直流伺服电机。
发明内容
本发明旨在克服现有技术存在的缺陷,本发明采用以下技术方案:
本发明提供了一种双路直流伺服电机驱动系统,用于控制和驱动两个直流伺服电机,其包括:数字处理电路,驱动电路,电流检测电路,母线电压检测电路,编码器电路以及通讯接口电路;
所述数字处理电路,分别与所述通讯接口电路、编码器电路、驱动电路、
电流检测电路以及母线电压检测电路连接;
所述驱动电路,一端连接所述数字处理电路,另一端与两个所述直流伺服电机连接,用于驱动所述直流伺服电机;
所述电流检测电路,一端连接所述数字处理电路,另一端连接所述驱动电路。
在一些实施例中,所述双路直流伺服电机驱动系统还包括预驱动电路,所述预驱动电路设置在所述数字处理电路与所述驱动电路之间,并与所述数字处理电路与所述驱动电路分别连接。在一些实施例中,所述驱动电路为MOS管H桥驱动电路;
所述数字处理电路的输出端和所述预驱动电路的输入端连接;
所述预驱动电路的输出端和所述驱动电路的输入端连接;
所述驱动电路的下桥臂和所述电流检测电路输入端连接;
所述电流检测电路的输出端和所述数字处理电路的输入端连接。
在一些实施例中,所述MOS管H桥驱动电路由8个N沟道场效应管组成,组成4路H桥电路,实现双电机的驱动能力。
在一些实施例中,所述数字处理电路、通讯接口电路、预驱动电路、驱动电路分别与电源电路连接,并由所述电源电路提供电源。
在一些实施例中,所述电源电路采用3片基于SGM61410芯片的电路,所述电源电路将外部12~42V电源输出分别转为12V、5V和3.3V电源。
在一些实施例中,所述数字处理电路包括:USART单元、QEP单元、PWM单元以及ADC单元;
所述USART单元与所述通讯接口电路连接;
所述QEP单元与所述编码器电路连接;
所述PWM单元与所述预驱动电路连接,输出8路PWM驱动信号,以控制两路直流伺服电机的正常工作;
所述ADC单元与所述电流采样电路以及所述母线电压采样电路分别连接。
在一些实施例中,所述预驱动电路由4片IR2103半桥驱动电路组成,用于增强所述数字处理电路的PWM信号的驱动能力。
在一些实施例中,所述电流检测电路由采样电阻和滤波电路组成;
所述电流检测电路输出端和所述数字处理电路的ADC单元引脚连接,实现相电流的数字采样。
在一些实施例中,所述母线电压检测电路由分压电阻、钳位二极管、滤波电路组成;
所述母线电压检测电路的输出端和所述数字处理电路的ADC单元引脚连接,实现相母线电压的检测。
本发明的技术效果:本发明公开的双路直流伺服电机驱动系统通过数字处理电路,驱动电路,电流检测电路,母线电压检测电路,编码器电路以及通讯接口电路之间的配合实现两个直流伺服电机的控制和驱动。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
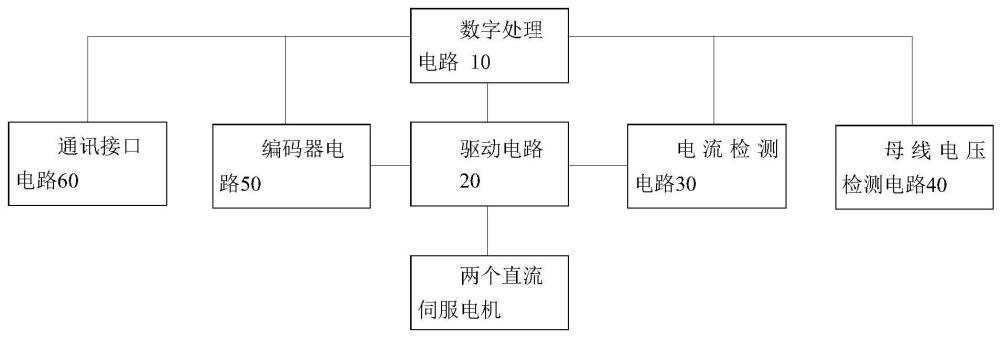
图1是根据本发明一个实施例的一种双路直流伺服电机驱动系统的结构框图;
图2是根据本发明一个实施例的一种双路直流伺服电机驱动系统的结构示意图;
图3是根据本发明一个实施例的一种双路直流伺服电机驱动系统中电源电路的结构示意图;
图4是根据本发明一个实施例的一种双路直流伺服电机驱动系统中直流伺服电机的控制示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本申请实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本申请。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本申请的描述。
应当理解,当在本申请说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
还应当理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
如在本申请说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。
另外,在本申请说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
在本申请说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本申请的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
以下将结合附图所示的各实施方式对本发明进行详细描述。但该等实施方式并不限制本发明,本领域的普通技术人员根据该等实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
本发明实施例提供了一种双路直流伺服电机驱动系统。
参考图1所示,本发明实施例提供了一种双路直流伺服电机驱动系统,用于控制和驱动两个直流伺服电机,其包括:数字处理电路10,驱动电路20,电流检测电路30,母线电压检测电路40,编码器电路50以及通讯接口电路60;
所述数字处理电路10,分别与所述通讯接口电路60、编码器电路50、驱动电路20、电流检测电路30以及母线电压检测电路40连接;
所述驱动电路20,一端连接所述数字处理电路10,另一端与两个所述直流伺服电机连接,用于驱动所述直流伺服电机;
所述电流检测电路30,一端连接所述数字处理电路10,另一端连接所述驱动电路20。在一些实施例中,参考图2所示,所述双路直流伺服电机驱动系统还包括预驱动电路80,所述预驱动电路80设置在所述数字处理电路10与所述驱动电路20之间,并与所述数字处理电路10与所述驱动电路20分别连接。
在一些实施例中,参考图2所示,所述驱动电路20为MOS管H桥驱动电路20;
所述数字处理电路10的输出端和所述预驱动电路80的输入端连接;
所述预驱动电路80的输出端和所述驱动电路20的输入端连接;
所述驱动电路20的下桥臂和所述电流检测电路30输入端连接;
所述电流检测电路30的输出端和所述数字处理电路10的输入端连接。
在一些实施例中,所述数字处理电路10为GD32数字处理电路10。GD32数字处理电路10的主控芯片及其外围电路包括:选用国产兆易电子的GD32f450IK,接收各部分检测电路的电流、电压、编码器角度信号后,调用对应软件程序计算处理,最终输出8路(4对)PWM驱动信号,以控制两路直流伺服电机的正常工作。
在一些实施例中,所述MOS管H桥驱动电路20由8个N沟道场效应管组成,组成4路H桥电路,实现双电机的驱动能力。其中MOS管可根据电机额定电流的大小更换不同的型号,不影响本系统其他功能的正常运行。
在一些实施例中,参考图3所示,所述数字处理电路10、通讯接口电路60、预驱动电路80、驱动电路20分别与电源电路连接,并由所述电源电路提供电源。
在一些实施例中,所述电源电路采用3片基于SGM61410芯片的电路,所述电源电路将外部12~42V电源输出分别转为12V、5V和3.3V电源。
在一些实施例中,参考图2所示,所述数字处理电路10包括:USART单元、QEP单元、PWM单元以及ADC单元;
所述USART单元与所述通讯接口电路60连接;
所述QEP单元与所述编码器电路50连接;
所述PWM单元与所述预驱动电路80连接,输出8路PWM驱动信号,以控制两路直流伺服电机的正常工作;
所述ADC单元与所述电流采样电路以及所述母线电压采样电路分别连接。
所述USART(Universal Synchronous Asynchronous Receiver/Transmitter,通用同步/异步收/发器)单元是的串口通信单元,可以生成与许多不同标准协议相对应的形式的数据。
所述QEP单元是正交编码器单元,是集光、机和电技术于一体的数字化传感器,通过光电转换将输出轴上的机械几何位移量转换成脉冲或者数字量的传感器,可以高精度测量被测物的转角或直线位移量。它具有分辨率高、精度高、结构简单、体积小、使用可靠、性价比高等优点。在数控机床、机器人、雷达、光电经纬仪、伺服系统等诸多领域中得到了广泛的应用。
本实施例中的QEP单元主要由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
所述ADC(Analog-to-Digital Converter,模数转换)单元是指将连续变量的模拟信号转换为离散的数字信号的器件,比如将模温度感器产生的电信号转为控制芯片能处理的数字信号。本实施例中的ADC单元可由数字寄存器、模拟电子开关、位权网络、求和运算放大器和基准电压源组成。在一些实施例中,所述预驱动电路80由4片IR2103半桥驱动电路20组成,用于增强所述数字处理电路10的PWM信号的驱动能力。所述预驱动电路80可增强GD32数字处理电路10PWM信号的驱动能力,使其能够驱动MOS管H桥驱动电路20中的MOS管可靠地导通与关断。
在一些实施例中,参考图2所示,所述电流检测电路30由采样电阻和滤波电路组成;
所述电流检测电路30输出端和所述数字处理电路10的ADC单元引脚连接,实现相电流的数字采样。
在一些实施例中,所述母线电压检测电路40由分压电阻、钳位二极管、滤波电路组成;
所述母线电压检测电路40的输出端和所述数字处理电路10的ADC单元引脚连接,实现相母线电压的检测。
本发明实施例的双路直流伺服电机驱动系统工作流程入下:
第一步、输入初始化参数。通过计算机操作界面输入编码器线对数、减速器速比,电机额定转速、额定工作电压、峰值堵转电流和连续堵转电流。
第二步、参数自动调试。通过计算机操作界面发出参数自动调试指令,系统会发出多频段的正弦波扫描信号,自动测试电机的运行参数,并通过阶跃信号检测调试结果,最终达到程序设定的最优化参数,并保存在所述数字处理电路10的存储器中。在本实施例里中,该存储器为Flash。两路直流伺服电机的操作步骤相通,分别通过计算机操作界面进行设置。
第三步、参数手动调试。如果用户对自动调试参数的控制精度不满意,可在计算机操作界面上进入专家调试模式,实现对速度和位置闭环的PID参数手动调整,调整结束后,可将参数存储在所述数字处理电路10的存储器中。
第四步、初始零位标定。用户可以通过计算机操作界面输入零位标定指令,将直流伺服电机运行的当前位置设置为零初始位置,并将改位置保存在所述数字处理电路10的存储器中。
参阅图4所示,是根据本发明一个实施例的双路直流伺服电机驱动系统中直流伺服电机的控制示意图。其中图中,ACR是电流控制器,ASR是速度控制器,APR是位置控制器,CODER为测角原件。本实施例中,数字处理电路10为GD32数字处理电路10。
如图4所示,直流伺服电机的电流通过电流检测电路30获得,GD32数字处理电路10通过获取的电流的信号实现对直流伺服电机的电流的控制,实现电流闭环控制的同时实现系统过流保护的功能。
GD32数字处理电路10将角度编码器进行差分处理得到角速度信息,通过速度闭环控制回路,实现电机角速度的精确控制。
GD32数字处理电路10接收角度编码器的输出的角速度信息,通过位置闭环控制回路,实现电机定位和角度引导的精确控制。本发明的技术效果:本发明公开的双路直流伺服电机驱动系统通过数字处理电路10,驱动电路20,电流检测电路30,母线电压检测电路40,编码器电路50以及通讯接口电路60之间的配合实现两个直流伺服电机的控制和驱动。
相较于现有技术,本发明实施例提供的双路直流伺服电机驱动系统,实现了双路直流伺服电机智能化参数自动调节、以及速度、位置的闭环高精度控制;并且该驱动系统开发了专家调试模式,可通过对外接向用户开放调试参数,以取得更高的控制精度,提升了系统灵活性;并通过电源电路的配合使得本发明具有12~42V宽压供电、过流保护的能力,提高了驱动系统的适用性和工作安全性。
结合本文中所公开的实施例描述的方法或算法的步骤可以用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(RAM)、内存、只读存储器(ROM)、电可编程ROM、电可擦除可编程ROM、寄存器、硬盘、可移动磁盘、CD-ROM、或技术领域内所公知的任意其它形式的存储介质中。
在本发明的描述中,需要理解的是,本发明实施例中中提及的参数、变量以及程序名等符号均可替代成不至混淆的任何其他代号。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
- 一种双自由度伺服电机驱动的船舶推进力模拟装置
- 一种双路轮毂伺服电机驱动及控制系统
- 一种双路直流马达驱动电路