一种电动吻合器主传动手动回退机构
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及医疗器械领域,具体涉及一种电动吻合器主传动手动回退机构。
背景技术
目前腔镜吻合器主要以手动操作方式为主,容易导致医生的手术疲劳,手术效果随医生的经验会产生差异,手术中会产生牵拉和抖动等因素,影响手术的质量。
当下电动腔镜吻合器手动回退机构都不是很便捷,如柯惠的IDRIVE,需要单独设置一个长长的旋转扳手作为独立的零件,单独包装才能完成手动回退功能;再如,维尔凯迪的也是单独的一个旋转手柄独立包装,这样的设计,手动回退手柄和器械主体分开,一方面存储运输复杂,容易丢失,另一方面在紧急处理状况下,容易因紧张的氛围造成寻找困难。
发明内容
针对上述技术问题,本发明提供了一种电动吻合器主传动手动回退机构,
包括:
电机、由所述驱动电机驱动的传动齿轮、由所述传动齿轮驱动的齿条、用于安装所述传动齿轮的导向销、设于所述传动齿轮上端面的拨片挡块以及与所述拨片挡块抵接的凸轮扳手,所述齿条的侧边设有棘齿,所述齿条的上端面设有齿轮凸台,所述齿轮凸台的个数为三个,所述三个齿轮凸台分别对应30mm、45mm、60mm三个挡位。
优选的,所述凸轮扳手下方设有棘齿拨片。
优选的,所述拨片挡块两侧设有卡扣。
优选的,所述拨片挡块的下方设有挡板,所述挡板为L形。
优选的,所述棘齿拨片与所述凸轮扳手之间采用铰接的连接方式。
优选的,所述卡扣往下运动行程的中设有用于限位所述卡扣的斜面凸台。
有益效果:
1、本发明改进现有电动吻合器的回退方式,设计有在电机失效时的应急措施,通过手动操作凸轮扳手,实现传动系统与电机的脱离,从而保证当电机失效时也可以顺利从腹腔镜中取出器械。
附图说明
下面结合附图对本发明作进一步的说明。
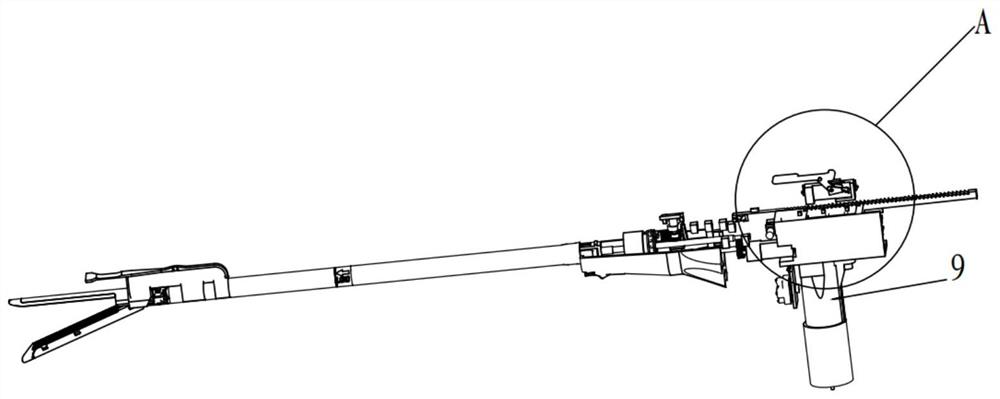
图1为本发明实施例的整体结构示意图;
图2为图1中A处放大示意图;
图3为本发明剖视图;
图4为图3中B处放大示意图。
图中数字表示:
1、拨片挡块2、凸轮扳手3、棘齿拨片4、棘齿5、卡扣6、导向销7、齿条8、传动齿轮9、电机10、斜面凸台11、挡板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
本发明的描述中,需要理解的是,术语中“前”、“后”、“左”、“右”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了方便描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,本发明包括电机9、由所述电机9驱动的传动齿轮8、由所述传动齿轮8驱动的齿条7、用于安装所述传动齿轮8的导向销6、设于所述传动齿轮8上端面的拨片挡块1以及与所述拨片挡块1抵接的凸轮扳手2,所述齿条7的侧边设有棘齿4,所述齿条7的上端面设有齿轮凸台,所述齿轮凸台的个数为三个,所述三个齿轮凸台分别对应30mm、45mm、60mm三个挡位。所述凸轮扳手2下方设有棘齿4拨片,所述拨片挡块1两侧上设有卡扣5,所述拨片挡块1的下方设有挡板11,所述挡板为L形。所述棘齿拨片3与所述凸轮扳手2之间采用铰接的连接方式,所述卡扣5往下运动行程的中设有用于限位所述卡扣5的斜面凸台10。
本发明通过凸轮加棘轮的机构,实现传动齿轮8与电机9脱离以及齿条7的后退。在齿条7上设计有棘齿4特征,凸轮扳手2上设计有棘齿4拨片。初始位置时,棘齿4拨片被拨片挡块1挡住,当电机9失效时,可以通过凸轮扳手2的凸轮机构将拨片挡块1压下去,从而将传动齿轮8脱离开齿条7,与此同时,凸轮扳手2上的棘齿拨片3在弹簧的作用下落到齿条7的棘齿4上,通过凸轮扳手2的棘齿拨片3带动棘轮机构运动,实现对齿条7的回退。
本发明安装在双马达驱动的电吻合器上,双马达包括主马达和小马达,主马达主要驱动系统的主齿条传动,从而实现远端执行机构的缝合和切割功能。小马达驱动一系列的齿轮传动机构,最终驱动弯转齿条,从而驱动远端执行机构进行左右弯转功能。
对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。
- 一种电动吻合器主传动手动回退机构
- 一种电动吻合器弯转机构的手动回退机构