用于布置在车辆地板上的机动车结构组件
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及一种根据权利要求1的前序部分的机动车结构组件和根据权利要求15的前序部分的调节机构。
背景技术
这样的机动车结构组件可以适合于布置在车辆地板上。例如,机动车结构组件可以在车辆地板上布置在驾驶员座椅与副驾驶员座椅之间。
机动车结构组件包括至少一个收纳单元,收纳单元分别包括载体和用于收纳物品的容器。容器布置在载体上并且能沿着移动方向相对于载体移动。机动车结构组件还包括定位设备,其适合于在机动车结构组件上定位至少一个收纳单元。定位设备包括至少一个导轨,至少一个收纳单元能沿着该导轨移动。收纳单元沿着至少一个导轨的运动限定出轨道状的调节体积。此外,机动车结构组件还包括调节机构。调节机构具有操纵单元和操纵元件,该操纵元件适合于使收纳单元的所选定的容器沿着操纵路径移动。操纵路径沿着移动方向延伸。为了存放和/或取出物品,收纳单元通过定位设备定位在所选定的至少包括在操纵路径中的定位处。
发明内容
基于这种在先公知的机动车结构组件,所提出的解决方案的任务在于,特别是在调节机构方面改进机动车结构组件。
根据第一方面,该任务利用根据权利要求1的机动车结构组件来解决,并且根据第二方面,该任务通过调节机构来解决。
根据所提出的解决方案的第一方面,所提出的机动车结构组件设置的是,操纵元件能借助操纵单元在调节体积之外的息止位置至操纵位置之间调节。在该操纵位置中,操纵元件嵌接到调节体积中,用以在操纵路径的起点与操纵路径的终点之间调节容器。
在一个实施例中,操纵路径由选定的容器的载体沿着移动方向的长度来规定。当选定的容器容纳在载体中时,选定的容器可以处于起点。当选定的容器从载体中拉出用以输出和/或取出物品时,选定的容器可以位于终点。起点和终点可以例如经由调节机构的特征变量来限定。可能的特征变量可以是驱动器的、驱动传动装置的或螺杆的转动圈数。因此,操纵路径也可以由特征变量规定。例如,沿着操纵路径从起点到终点调节选定的容器可能需要螺杆的特定的转动圈数。因此,选定的容器可以移出到底。
为了调节选定的容器,操纵元件可以与选定的容器联接。例如,操纵元件可以推动或拉动选定的容器。原则上也可以在终点处设置端部止挡,操纵元件和/或选定的容器撞击该端部止挡,从而不再能沿着移动方向继续调节。
操纵元件也可以将选定的容器从终点调节至起点。例如,操纵元件可以拉动或推动选定的容器。在起点处,操纵元件和/或选定的容器撞击载体或为此设置的起始止挡,从而不再能沿着移动方向继续调节。在一个实施例中,选定的容器在起点处撞击载体,从而使得操纵元件在通过操纵单元继续调节时与选定的容器脱联。为了脱联,可能需要克服选定的容器与操纵元件之间的引力。在一个实施例中,操纵元件与选定的容器磁性联接。在该实施例中,当选定的容器撞击载体时,操纵元件可以沿着移动方向继续调节,用以克服磁性引力,从而使操纵元件与选定的容器脱联。
可以设置有磁性器件用于在操纵元件与选定的容器之间的磁性联接。例如,可以在操纵元件上布置永磁体,该永磁体与至少区段式铁磁性的选定的容器联接。磁性器件可以引起操纵元件与选定的容器之间的引力,使得选定的容器可以被操纵元件沿着移动方向拉动。原则上,当然也可以通过其他可脱开的器件来实现操纵元件与选定的容器之间的联接,例如形状锁合的(formschlüssig)、磨擦锁合的(reibschlüssig)或力锁合的(kraftschlüssig)连接,特别是卡锁连接。
在起点时,操纵元件能调节到息止位置中,在该息止位置中,操纵元件布置在调节体积之外。在调节体积之外,操纵元件不会妨碍定位设备对收纳单元的调节。为此,调节机构可以沿着垂直于车辆地板的方向侧向布置在调节体积之上。为了移动选定的容器,操纵元件可以沉入调节体积中,从而使得不再能通过定位设备来调节收纳单元,这是因为操纵元件在调节体积之内阻挡了收纳单元的调节路径。
在一个实施例中,调节机构包括滑槽引导部,操纵元件在该滑槽引导部上引导。操纵元件可以在布置于滑槽引导部之内的螺杆上引导。为此目的,操纵元件可以包括螺母,在螺杆的螺纹处通过转动螺杆能沿着移动方向调节该螺母。操纵元件还可以从滑槽引导部的内部探伸穿过缝隙。因此,操纵元件沿着移动方向的调节可以沿着缝隙实现。操纵元件特别是可以沿着操纵路径在滑槽引导部上直线引导。
为了实现操纵元件在息止位置与操纵位置之间的调节,调节机构可以滑槽引导部可以被构造成用于在调节期间使操纵元件沿着移动方向同时进行直线运动和枢转。因此,操纵元件可以以组合式的纵向和枢转运动来调节。为此,缝隙可以在起点与息止位置之间沿着轨迹曲线延伸。轨迹曲线可以根据90°转动直线引导部的类型来构造。因此,操纵元件可以同时转动90°且进行直线引导。由此,操纵元件可以从调节体积枢转离开或者可以枢转进入调节体积中。
在一个实施例中,机动车结构组件包括四个收纳单元,其中的第一收纳单元被定位在选定的定位处。其他三个收纳单元可以沿着环路、特别是等距地布置。例如,第二收纳单元可以布置在机动车结构组件的面对车辆地板的一侧上,并且第三收纳单元可以布置在机动车结构组件的背离车辆地板的一侧上。第四收纳单元可以布置在第二和第三收纳单元的与第一收纳单元相背的一侧上。借助定位设备可以沿着至少一个导轨在所述的布置之间调节收纳单元,从而使得例如第二收纳单元布置在选定的定位并且第三收纳单元布置在与第一和第四收纳单元相对置的一侧上。特别地,至少一个导轨可以形成闭合的环路。定位设备因此实现了链斗传送器(Paternoster)。原则上,机动车结构组件当然可以包括大量收纳单元,这些收纳单元特别是能沿着至少一个被构造为闭合的环路的导轨来调节。
因此,至少一个导轨可以形成闭合的环路。由此,例如从选定的定位沿着一个方向沿着至少一个导轨调节的收纳单元可以经过该至少一个导轨一次并且再次到达选定的定位。原则上可以设置沿着至少一个导轨在两个方向上的调节。机动车结构组件的使用者可以例如在输入元件处请求那个使用者希望从中取出物品或者希望存放物品到其中的收纳单元。于是,将使用者所请求的那个收纳单元调节到选定的定位处,以便可以输出选定的容器。
在下文中,将更详细地讨论收纳单元沿着至少一个导轨的调节。
收纳单元可以分别在至少一个导轨上经由至少一个滑架来引导。至少一个滑架可以布置在收纳单元上并且作用在用于引导收纳单元的至少一个导轨上。因此,收纳单元能经由至少一个滑架沿着至少一个导轨移动。原则上,其中每个收纳单元都可以具有至少一个这样的滑架。
在一个实施例中,收纳单元与至少一个导轨之间的角度是恒定的。该角度特别是在通过定位设备沿着至少一个导轨调节收纳单元时是恒定的。例如,收纳单元的纵轴线和至少一个导轨的纵轴线可以平行于车辆地板。在该实施例中,定位设备实现了链斗传送器。
为了保持在沿着至少一个导轨调节时收纳单元的角度恒定,至少一个滑架能够分别相对于收纳单元绕一个转动轴线转动。转动轴线可以平行于由至少一个导轨包围的面上的面垂线。特别地,该转动轴线可以横向于移动方向布置。当收纳单元沿着至少一个导轨的弧形部分调节时,至少一个滑架可以分别绕该转动轴线转动。由此,可以防止收纳单元相对于面垂线或转动轴线枢转。因此,在由至少一个导轨包围的面中,至少一个滑架在至少一个导轨的与车辆地板相邻的区段上的取向相对于至少一个滑架在至少一个导轨的与车辆地板间隔开的区段上的取向可以是成镜像的。
至少一个滑架原则上可以作用在至少一个导轨上,用以在至少一个导轨上进行引导。为此,可以在至少一个滑架上设置至少一个滚子元件,该滚子元件将至少一个滑架保持在至少一个导轨上。至少一个滚子元件可以在至少一个导轨上滚动,用以使至少一个滑架沿着至少一个导轨移动。原则上,至少一个滚子元件可以要么在由至少一个导轨包围的面之内滚动,要么在该面之外滚动。
至少一个滑架原则上可以围嵌至少一个导轨,用以在至少一个导轨上进行引导。为此,在至少一个滑架上可以设置至少两个滚子元件,这些滚子元件将至少一个滑架保持在至少一个导轨上。例如,至少一个导轨构造成轨道状,从而使得至少两个滚子元件在它们之间围住至少一个导轨的区段。因此,至少一个滑架可以力锁合和/或形状锁合地保持在至少一个导轨上。至少两个滚子元件中的一个可以在由至少一个导轨包围的面之内滚动,而至少两个滚子元件中的另一个可以在由至少一个导轨包围的面之外滚动。通过至少一个滑架绕转动轴线转动,依赖于收纳单元在定位设备上的定位地,至少两个滚子元件中的一个或另一个将可以与车辆地板间隔更大。
在另一实施例中,至少一个滑架具有至少两组滚子元件,其中,其中一组布置在由至少一个导轨包围的面之内,而另一组布置在由至少一个导轨包围的面之外。因此,这些组可以沿着移动方向在至少一个导轨的相背的侧上滚动。通过这两组可以将至少一个滑架保持在至少一个导轨上。
在至少一个导轨的弧形区段上,至少一个导轨的内半径可以小于外半径。内半径和外半径之间的差可以是至少一个导轨的厚度的函数。两组之间的垂直于收纳单元沿着至少一个导轨的调节方向的间距可以与至少一个导轨的厚度有关,以便确保至少一个滑架形状锁合地保持在至少一个导轨上。一组滚子元件之间的平行于收纳单元沿着至少一个导轨的调节方向的间距可以与内半径与外半径之间的差有关。在此,该平行于调节方向的间距特别是可以与该差成比例。在由至少一个导轨包围的面之内的那组的滚子元件与在由至少一个导轨包围的面之外的那组的滚子元件相比具有更小的彼此间距。
至少一个滑架可以经由至少一个柔性牵引构件沿着至少一个导轨调节。至少一个牵引构件可以布置在至少一个导轨上。因此,经由至少一个牵引构件可以将调节力导入到收纳单元中。能经由至少一个牵引构件导入到收纳单元中的调节力可以引起收纳单元沿着至少一个导轨运动。
特别地,至少一个滑架可以具有至少一个联接元件,至少一个滑架利用该联接元件联接到至少一个牵引构件上,从而使得在调节牵引构件时,至少一个滑架被牵引构件带动。联接元件可以抗相对转动地和/或位子固定地联接到至少一个牵引构件上。因此,至少一个滑架可以联接到至少一个牵引构件上,使得至少一个滑架相对于至少一个牵引构件是抗相对转动的,并且当调节至少一个牵引构件时至少一个滑架被至少一个牵引构件带动。
至少一个牵引构件可以形成闭合的环路。例如,由至少一个牵引构件包围的面可以与由至少一个导轨包围的面形状相同。由至少一个牵引构件包围的面尤其可以小于由至少一个导轨包围的面。此外,由至少一个牵引构件包围的面可以在由至少一个导轨包围的面之内居中地布置。至少一个牵引构件可以通过至少两个偏转元件偏转,从而使得由至少一个牵引构件包围出闭合的面。至少一个牵引构件在此可以在至少两个偏转元件上如下这样地引导:使得其自身不交叠。
当其中一个收纳单元沿着至少两个偏转元件中的任一个调节时,配属于收纳单元的至少一个滑架将相对于收纳单元枢转。在此,通过至少一个滑架及其联接元件的轴线无论偏转元件的定位如何都可以垂直于偏转元件上的切线地布置。
原则上,定位设备可以包括至少两个导轨。至少两个导轨可以分别围成一个面,该面与到车辆地板的垂线平行地布置。至少两个导轨可以彼此平行地布置。特别地,平行于车辆地板地穿过至少两个导轨的横截面可以形成平行四边形。因此,至少两个导轨可以沿着移动方向彼此错开地布置。特别地,至少两个导轨可以以彼此错开了收纳单元的长度的部分长度的方式布置。
收纳单元可以布置在至少两个导轨之间。因此,至少两个导轨可以沿着移动方向布置在收纳单元的相背的侧上。至少两个导轨中的每个导轨都可以具有至少一个在至少两个偏转元件上偏转的牵引构件。
因此,收纳单元可以在面对至少两个导轨中的任一个的一侧上分别具有至少一个滑架,通过该滑架将收纳单元保持在各自的导轨上。原则上,可以沿着共同的轴线布置至少两个滑架,该共同的轴线横向于收纳单元的沿着定位设备的调节方向。因此,至少两个滑架可以具有共同的转动轴线。在这样的实施方案中,平行于车辆地板地穿过至少两个导轨的横截面形成一个矩形。因此,至少两个导轨可以相对于垂直于车辆地板的平面对称地布置。在该实施例中,收纳单元能绕至少两个滑架的共同的转动轴线枢转。
在替选的实施方案中,至少两个导轨彼此错开地布置,在该实施方案中,至少两个滑架可以布置在沿着收纳单元的调节方向彼此错开的轴线上。因此,至少两个滑架可以具有彼此错开的转动轴线。特别地,这些转动轴线可以彼此平行地错开。在该实施方案中,由于至少两个滑架的之间的转动轴线错开,使得收纳单元相对于至少两个导轨是抗相对转动的。
在一个实施例中,至少两个导轨以沿着移动方向彼此错开一定间距的方式布置。该间距尤其可以是收纳单元的长度的部分长度。至少两个滑架可以以沿着移动方向彼此错开该间距的方式布置在收纳单元上。
所提出的任务还通过调节机构来解决。根据所提出的解决方案的第二方面,这种调节机构适合于布置在收纳单元上。收纳单元包括载体和用于收纳物品的容器。容器布置在载体上并且能沿着移动方向相对于载体移动。容器沿着移动方向的虚拟移动限定出虚拟移动体积。虚拟移动可以是沿着移动方向在任何方向上的假想的移动。在此通过容器扫过的空间可以限定出虚拟的移动体积。例如,虚拟的移动体积可以包括两个容器的体积。特别地,虚拟的移动体积可以反向于如下方向地延伸,在该方向上,容器沿着移动方向相对于载体移动用以存放和/或取出物品。
调节机构包括操纵单元和操纵元件。操纵元件适合于沿着操纵路径移动容器,操纵路径沿着移动方向延伸。此外,操纵元件能经由操纵单元在虚拟移动体积之外的息止位置至操纵位置之间调节,在该操纵位置中,操纵元件嵌接到虚拟移动体积中,用以在操纵路径的起点与操纵路径的终点之间调节容器。
因此,在容器能沿着移动方向和反向于该移动方向任意地移动的实施方式中,当操纵元件处于操纵位置中并且移动容器时,容器将与操纵元件碰撞。在该实施例中,当操纵元件处于息止位置中并且容器任意地移动时,容器就不会与操纵元件碰撞。
这种调节机构适用于根据所提出的解决方案的第一方面的机动车结构组件,但不限于此。特别地,调节机构可以用在机动车的仪表板中。例如,调节机构可以构造成用于抽屉的抽屉驱动器。
原则上,根据第二方面的调节机构可以具有根据第一方面的调节机构的特征,反之亦然。
附图说明
在附图中,示例性示出了所提出的解决方案的实施例。其中:
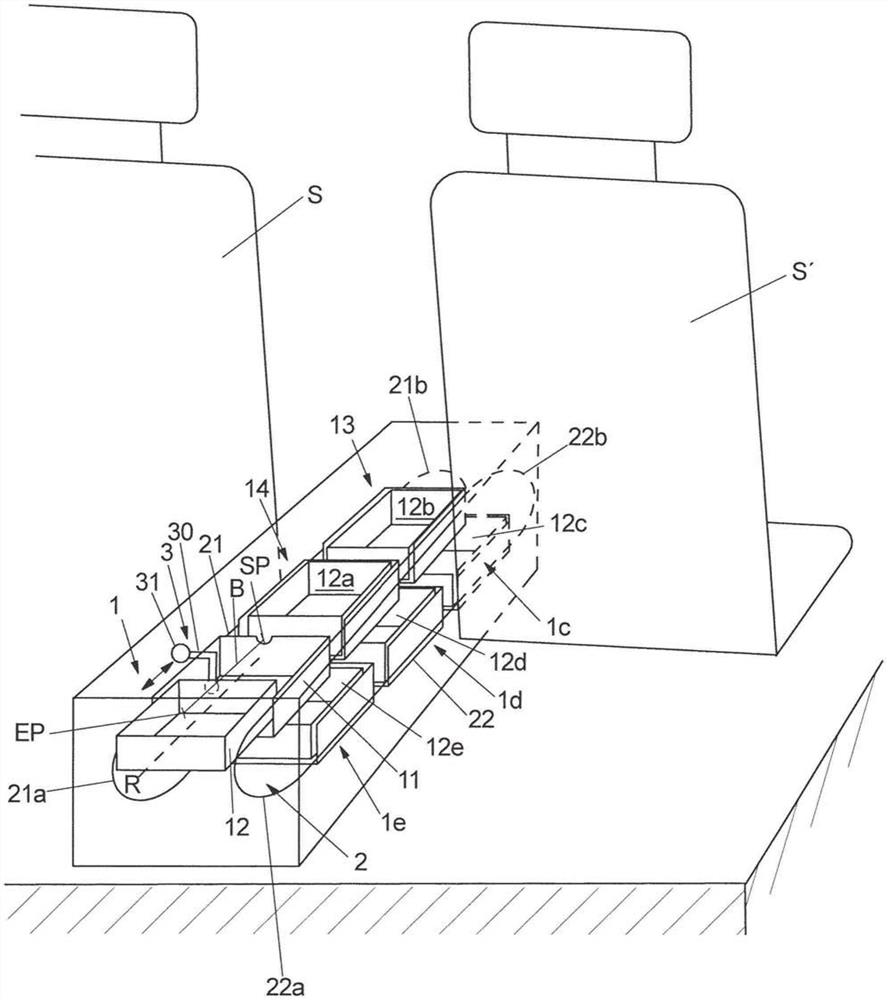
图1A示出两个车辆座椅之间的机动车结构组件,其具有在操纵路径的起点处的容器;
图1B示出两个车辆座椅之间的机动车结构组件,其具有在操纵路径的终点处的容器;
图2示出调节机构;
图3示出调节机构的操纵元件;
图4示出收纳单元上的调节机构;
图5示出收纳单元上的调节机构;
图6示出调节选定的容器的调节机构;
图7示出收纳单元;
图8示出具有两个收纳单元的定位设备;
图9示出机动车结构组件的剖视图;
图10示出机动车结构组件上的输出口;
图11示出机动车中的机动车结构组件;
图12A示出具有与机动车座椅的第一布置方案的机动车结构组件;和
图12B示出具有与机动车座椅的第二布置方案的机动车结构组件。
具体实施方式
图1A示出了机动车结构组件,该机动车结构组件在车辆地板FB上布置在两个机动车座椅S、S′之间。在所示的实施例中,一个机动车座椅S是驾驶员座椅,另一个机动车座椅S′是副驾驶员座椅。机动车结构组件从机动车的仪表板A出发沿着机动车的纵轴线延伸到机动车的后排。原则上,坐在驾驶员座椅、副驾驶员座椅和/或后排中的机动车乘员都可以使用该机动车结构组件。
机动车结构组件包括六个收纳单元1、1a、1b、1c、1d、1e。收纳单元1、1a、1b、1c、1d、1e特别适合于收纳诸如钱包、零食和/或钥匙之类的物品。为此目的,收纳单元1、1a、1b、1c、1d、1e分别包括容器12、12a、12b、12c、12d、12e。物品能放置在容器12、12a、12b、12c、12d、12e中。各自的容器12、12a、12b、12c、12d、12e布置在各自的收纳单元1、1a、1b、1c、1d、1e的载体11、11a、11b、11c、11d、11e上并且能相对于载体11、11a、11b、11c、11d、11e沿着移动方向R移动。移动方向R沿着机动车的纵轴线延伸。因此,收纳单元1、1a、1b、1c、1d、1e的容器12、12a、12b、12c、12d、12e能沿着从仪表板A往机动车的后排的方向相对于载体11、11a、11b、11c、11d、11e移动。
机动车结构组件还包括用于在机动车结构组件上定位收纳单元1、1a、1b、1c、1d、1e的定位设备2。在所示的实施例中,收纳单元1、1a、1b、1c、1d、1e从车辆地板FB出发堆叠地布置。在平行于车辆地板FB的第一平面中布置有三个收纳单元1、1a、1b、1c、1d、1e,并且在平行于车辆地板FB的第二平面中也布置有三个收纳单元1、1a、1b、1c、1d、1e。原则上,平行于车辆地板FB地可以设置任意数量的平面,在它们中布置有收纳单元1、1a、1b、1c、1d、1e。每个平面中的收纳单元1、1a、1b、1c、1d、1e的数量也可以是任意的。平面彼此之间的间距也可以任意选择。特别地,在布置于车辆底板FB附近的车辆地板平面BE中可以布置有特定数量的收纳单元1、1a、1b、1c、1d、1e,并且在与车辆地板FB间隔更远的座椅平面SE中可以布置有相同数量的收纳单元1、1a、1b、1c、1d、1e。在地板平面BE与座椅平面SE之间可以布置至少一个中间平面ZE,在其中布置有一个或两个收纳单元1、1a、1b、1c、1d、1e。中间平面ZE中的收纳单元1、1a、1b、1c、1d、1e尤其可以布置在仪表板A一侧和/或后排一侧。经由定位设备2,使得收纳单元1、1a、1b、1c、1d、1e必要时能越过至少一个中间平面ZE定位在地板平面BE和座椅平面SE中。
定位设备2包括两个导轨21、22,收纳单元1、1a、1b、1c、1d、1e能沿着两个导轨移动。因此,导轨21、22适合于通过定位设备2定位收纳单元1、1a、1b、1c、1d、1e。为此目的,收纳单元1、1a、1b、1c、1d、1e布置在导轨21、22之间,其中,收纳单元的第一侧分别与第一导轨21、22联接,并且收纳单元的第二侧分别与第二导轨21、22联接。导轨21、22构造成环路状,从而使得导轨21、22分别包围出垂直于车辆地板FB布置的舌状面。导轨21、22的各一个纵向侧沿着地板平面BE延伸,而导轨21、22的另一纵向侧沿着座椅平面SE延伸,从而使得收纳单元1、1a、1b、1c、1d、1e能经由导轨21、22的纵向侧21c、21d、22c、22d沿着机动车的纵轴线定位。纵向侧21c、21d、22c、22d因此平行于移动方向R布置。此外,纵向侧21c、21d、22c、22d经由导轨21、22的弧形侧向段21a、21b、22a、22b彼此连接。侧向段21a、21b、22a、22b与至少一个中间平面ZE相交,从而使得收纳单元1、1a、1b、1c、1d、1e能经由侧向段21a、21b、22a、22b从地板平面BE调节到座椅平面SE中。必要时,收纳单元1、1a、1b、1c、1d、1e可以经由侧向段21a、21b、22a、22b定位在至少一个中间平面ZE中。
收纳单元1、1a、1b、1c、1d、1e沿着两个导轨21、22的运动限定了轨道状的调节体积V。因此,调节体积V由当收纳单元1沿着导轨21、22运动时被收纳单元1扫过的体积组成。因此,调节体积V被限定成类似于变形的实心环面。实心环面在此通过如下方式来限定,即,一个圆面围绕旋转轴线旋转了360°,其中,旋转轴线与该圆面共面且不与该圆面相交。在所示的实施例中,调节体积V包括分别沿着地板平面BE和座椅平面SE彼此平行且间隔开的两个长方体区段,以及两个马蹄形侧向区段,马蹄形侧向区段沿着机动车的纵轴线分别在端部处将两个长方体区段彼此连接。原则上,调节体积V的形状也是环形的。显然,导轨21、22可以沿着任意轨迹引导收纳单元1、1a、1b、1c、1d、1e。因此,调节体积V可以任意地成形。特别地,侧向区段可以任意地成形,例如拱形突出地成形。
机动车结构组件还包括调节机构3。调节机构3被构造成与收纳单元1、1a、1b、1c、1d、1e中任一个协同作用。为此,调节机构3在后排一侧地布置在机动车结构组件上。为了与收纳单元1协同作用,收纳单元1必须首先利用定位设备2定位在选定的定位处。因此,调节机构3与定位在选定的定位处的收纳单元1交互作用。在所示的实施例中,与沿着机动车的纵轴线的其他收纳单元1a、1b、1c、1d、1e相比,收纳单元1在被选定的定位处被定位在最靠近机动车的后排且离车辆地板FB最远。由此,与未定位在选定的定位中的其他收纳单元1a、1b、1c、1d,le相比,后排中的乘员可以更容易够到收纳单元1,用以存放和/或取出物品。因此,定位设备2将收纳单元1定位在选定的定位处,以便使机动车的乘员能够从收纳单元1的容器12中取出物品或将物品存放到其中。
如图1B所示,调节机构3用于使已经由定位设备2定位在选定的定位处的收纳单元1的容器12(选定的容器12)相对于该收纳单元的载体11移动。选定的容器12能沿着操纵路径B移动,该操纵路径沿着移动方向R延伸。因此,操纵路径B沿着机动车的纵轴线延伸。至少是所选定的定位被包括在操纵路径B中。因此,操纵路径B具有至少一个与选定的定位相交的交点。特别地,操纵路径B具有起点SP和终点EP。起点SP原则上是指容器12相对于载体11的如下定位,在该定位中,由载体11和容器12占据的体积小于当容器12定位在终点EP处时所占据的体积。
在所示的实施例中,容器12、12a、12b、12c、12d、12e被构造成抽屉状,从而使得它们可以被推入到配属于它们的载体11、11b、11c、11d、11e中和从中拉出。载体11、11a、11b、11c、11d、11e限定了用于容器12、12a、12b、12c、12d、12e的框形容纳部,容器12、12a、12b、12c、12d、12e能完全容纳在该容纳部中。因此,当容器12、12a、12b、12c、12d、12e被容纳在载体11、11a、11b、11c、11d、11e中时,所要求的体积最小。当沿着操纵路径B相对于所配属的载体11、11a、11b、11c、11d、11e调节容器12、12a、12b、12c、12d、12e时,所共同要求的体积增加。特别地,容器12可以相对于所配属的载体11移动,直到到达终点EP。于是,所共同要求的体积是最大的。原则上,容器12、12a、12b、12c、12d、12e都容纳在载体11、11a、11b、11c、11d、11e中,以便使所要求的体积最小。在选定的定位处,可以实现相对于所配属的载体11调节容器12,用以存放和/或取出物品。
为了沿着操纵路径B调节容器12,调节机构3包括操纵单元31和操纵元件30。操纵元件30原则上在息止位置中时布置在调节体积V之外,如图1A所示,从而可以实现沿着导轨21、22调节收纳单元1、1a、1b、1c、1d、1e,用以使收纳单元1、1a、1b、1c、1d、1e定位。为了调节容器12,将调节元件30调节到如图1B所示的操纵位置中,在该操纵位置中,调节元件30嵌接到调节体积V中。在操纵位置中设置的是,收纳单元1、1a、1b、1c、1d、1e的定位不改变。在操纵位置中,通过操纵元件30能在操纵路径B的起点SP与操纵路径B的终点EP之间调节所选定的容器12。经由操纵单元31实现在息止位置、起点SP和终点EP之间调节操纵元件30。因此,操纵单元31被配置成用于调节操纵元件30。
为了调节操纵元件30,操纵单元31被构造成使得其能够实现操纵元件30的枢转和直线调节,如图2所示。特别地,操纵单元31可以实现组合式的枢转运动和直线调节。通过操纵单元31的螺杆312可以实现直线调节,操纵元件30在该螺杆上引导。螺杆312能由驱动器313驱动,用以调节操纵元件30。为了引导操纵元件30,操纵单元31包括滑槽引导部311,沿着该滑槽引导部能调节操纵元件30。螺杆312布置在滑槽引导部311之内。滑槽引导部311包括枢转区段3110,该枢转区段被构造成使得操纵元件30在被调节通过枢转区段3110时在操纵单元31上枢转了90°。在此时,操纵元件30由于在操纵单元31处的强制引导而相对于螺杆312枢转。强制引导经由滑槽引导部311来提供。操纵元件30由此沿着枢转区段3110区段式沿着螺旋轨迹引导。
枢转区段3110布置在息止位置与起点SP之间,从而使得操纵元件30能在组合式的纵向和枢转运动中在息止位置与起点SP之间被调节。在组合式的纵向和枢转运动过程中,操纵元件30嵌接到调节体积V中。
为了嵌接到调节体积V中,操纵元件30构造成钩状,其中,操纵元件在垂直于移动方向R布置的平面中延伸。操纵元件30包括引导区段302,在该引导区段上,操纵元件30在操纵单元31上引导。此外,操纵元件30包括钩区段300,该钩区段在操纵位置中至少部分地嵌接到调节体积V中。如图3所示,钩区段300和引导区段302彼此垂直地布置在垂直于移动方向R布置的平面中。在钩区段300上布置有磁性的构件301,以便与选定的容器12联接。在所示的实施例中,磁性的构件301是正圆的永磁体。原则上,操纵元件30当然也可以经由任意其他机构,例如铁磁体或卡锁连接部与选定的容器12联接。在替选的实施例中,操纵元件30能借助操纵单元31直线地移入到调节体积V中和从中被拉出。例如,为此,操纵单元31可以包括伸缩臂,该伸缩臂能伸长,以便引入操纵元件30,并且能缩短,以便拉出操纵元件30。
图4示出了在操纵元件30与选定的容器12之间的联接可能性。在所示的实施例中,操纵元件30包括永磁体,只要操纵元件已被调节到起点SP处,该永磁体就与选定的至少部分是铁磁性的容器12联接。为此,配属于选定的容器12的载体11包括开口110,操纵元件30移动穿过该开口,以便与选定的容器12物理联接。原则上,操纵元件30当然也可以在利用磁性引力的远距离作用的情况下以与选定的容器12有间距地与选定的容器12联接,从而经由磁性引力能将调节力在两个方向上沿着操纵路径B导入到选定的容器12中。
为了使容器12相对于所配属的载体11移动,图5中所示的容器12经由两个导轨111、112以能移动的方式在所配属的载体11上引导。在替选的实施例中,容器12经由至少一个导轨在所配属的载体11上引导。
为了使选定的容器12从起点SP移动至终点EP,能经由操纵元件30将推力导入到选定的容器12中,该推力产生了选定的容器12沿着操纵路径B的调节运动,如图6所示。为了导入推力,经由操纵单元31使操纵元件30向着选定的容器12移动。相反地,为了将选定的容器12从终点EP移动至起点SP,经由操纵元件30能将拉力导入到选定的容器12中,该拉力产生了选定的容器12沿着操纵路径B的调节运动。为了导入拉力,经由操纵单元31使操纵元件30沿着操纵路径B运动,从而将其拉离选定的容器12。由于在操纵元件30与选定的容器12之间的联接,使得选定的容器12在此沿着移动方向R被操纵元件30带动。调节元件30能沿着其被调节的滑槽引导部311的长度相当于收纳单元1的长度。
原则上,同样通过将拉力导入到选定的容器12中也能产生从起点SP至终点EP的移动。例如,操纵元件30可以嵌接到选定的容器12中,以便移动选定的容器12。因此,在替选的实施例中,操纵元件30可以作用在选定的容器12的内部中,用以移动选定的容器12。
结合图2至图6描述的调节机构的特征尤其也是根据所提出的解决方案的第二方面的调节机构可以具有的那些特征。
在下文中,将详细地讨论通过定位设备2对收纳单元1、1a、1b、1c、1d、1e的定位。图7示出了具有载体11和容器12的收纳单元1,该容器能在导轨111、112之上相对于载体11移动。在平行于移动方向R布置的载体11的两个相背的侧上,分别布置有滑架13、13′。滑架13、13′用于让收纳单元1在导轨21、22上引导。因此,收纳单元1能经由两个滑架13、13′以能移动的方式支承在导轨21、22上。在图7中完全可见的滑架13具有三个滚子元件131a、131b、131c,它们在它们之间围成一个三角形。三角形的其中一个顶点指向车辆地板FB。形成该顶点的滚子元件131c具有比其他两个滚子元件131a、131b更大的直径。
滚子元件131a、131b、131c相对彼此在滑架13上构成中间空间,在该中间空间中能布置导轨21。于是,导轨21在三角形的顶点处的滚子元件131c与形成三角形的底边的滚子元件131a、131b之间延伸。因此,三角形的高度相当于底边的滚子元件131a、131b的半径、三角形顶点的滚子元件131c的半径和导轨21的平行于三角形高度的高度之和。
在图8中所示的实施例中,收纳单元1、1a分别包括具有四个滚子元件131a、131b、131c、131d、131aa、131ab、131ac、131ad的滑架13、13′、13a。这四个滚子元件分别围成一个梯形。收纳单元1、1a布置在导轨21上,使得导轨21平行于梯形的底边延伸。导轨21也形成闭合的环路,并且梯形的较短底边布置在由环路围绕的内面中。滚子元件131a、131b、131c、131d、131aa、131ab、131ac、131ad在导轨21上滚动,以便可以实现收纳单元1、1a沿着导轨21的定位和实现将滑架13、13a保持在导轨21上。原则上,收纳单元1、1a可以经由单个滚子元件支承在导轨21上。在多个滚子元件的情况下,滚子元件可以围成任意几何图形,特别是矩形或正方形。
在图8的实施例中,导轨21、22分别构造成环路。为了可以实现沿着整个导轨21、22进行引导,滑架13、13′、13a分别相对于收纳单元1、1a能绕横向于移动方向R布置的转动轴线D1、D2转动。转动轴线D1、D2分别延伸穿过滑架13、13′、13a的中心点。当收纳单元1、1a沿着导轨21、22的弧形侧向段21a、21b、22a、22b运动时,滑架13、13′、13a绕转动轴线D1、D2转动。由此,滑架13、13′、13a补偿了导轨21、22的曲率的变化,并且不管在导轨上的定位如何,收纳单元1、1a相对于车辆地板FB的取向都不变。
另外,在所示的实施例中布置在座椅平面SE中的收纳单元1上,滑架13、13′布置在收纳单元的相背的侧上。滑架13、13′的转动轴线D1、D2垂直于移动方向R地布置并且彼此间隔开,从而使得收纳单元1能以抗相对转动的方式在导轨21、22上移动。因此,收纳单元1的滑架13、13′沿着移动方向R彼此错开地布置在收纳单元1上。由此,排除了收纳单元1相对于导轨21、22的例如由机动车的颠簸运动引起的摇摆运动。
收纳单元1、1a与在导轨21、22上的定位无关地取向,使得容器12、12a的敞开侧沿着重力方向靠上布置,通过该敞开侧能将物品存放在容器12、12a中。因此,容器12、12a、12b、12c、12d、12e的底面原则上平行于车辆地板FB地布置。
图8中的收纳单元1的两个滑架13、13′以沿着移动方向R彼此错开一定间距的方式布置。两个滑架13、13′中的每个滑架都配属于各一个导轨21、22,从而使得收纳单元1经由两个滑架13、13′在导轨21、22上引导。两个导轨21、22也以沿着移动方向R彼此错开一定间距的方式布置,从而使得收纳单元平行于导轨21、22且在它们之间居中地引导。该沿着移动方向R的间距是收纳单元沿着移动方向R的长度的部分长度。在所示的实施例中,部分长度是指收纳单元1的长度的百分之七十。原则上,部分长度可以具有任意长度。特别地,部分长度可以是收纳单元1的长度的百分之一百。
驾驶员座椅S一侧的导轨21以沿着移动方向R朝后排的方向与副驾驶员座椅S′一侧的导轨22错开一定间距的方式布置。相应地,使得收纳单元布置在驾驶员座椅S一侧的导轨21上的那个滑架13以沿着移动方向R朝后排的方向与使得收纳单元1布置在副驾驶员座椅S′一侧的导轨22上的那个滑架13′错开一定间距的方式布置。
此外,滑架13、13a分别包括用于联接至柔性牵引构件23、24的联接元件132、132a,该柔性牵引构件是能调节的,用以将调节力导入到收纳单元1、1a中,其中,调节力使收纳单元沿着导轨21、22移动。在两个导轨21、22中的每个导轨上均布置有牵引构件23、24。牵引构件23、24分别平行地沿着导轨21、22在收纳单元1、1a的面对至少一个导轨21、22的一侧上延伸。为此,牵引构件23、24分别布置在由导轨21、22包围的面之内。
牵引构件23、24分别在两个偏转元件23a、23b、24a、24b处偏转,从而使得牵引构件分别包围出与由导轨21、22包围的面形状相同的面。偏转元件23a、23b、24a、24b被构造为滚子,在它们之上引导有被构造为皮带的牵引构件23、24。偏转元件23a、23b、24a、24b的转动引起对各自的牵引构件23、24的调节。
滑架13、13′、13a利用其联接元件132、132a分别作用在牵引构件23、24上,从而在调节牵引构件23、24时滑架被牵引构件23、24带动。在替选的实施例中,滑架13、13′、13a牢固地与牵引构件23、24连接或附着在牵引构件23、24上。
导轨21、22原则上包括两个平行布置的纵向侧21c、21d、22c、22d和两个弧形的侧向段21a、21b、22a、22b,弧形的侧向段将纵向侧21c、21d、22c、22d连接起来。图9示出了替选的实施例,在其中,后排一侧的侧向段21a、21b、22a、22b与纵向侧21c、21d、22c、22d相比区段式地与车辆地板FB间隔更大。导轨21、22在此构造成使得在选定的定位处的收纳单元与其他收纳单元相比与车辆地板FB间隔更大。
图9中所示的收纳单元1布置在输出开口41与另外的输出开口41A之间。例如,收纳单元1可以恰好处于从另外的输出开口41A至输出开口的调节运动中。经由滑架13′的滚子元件131a′、131b′、131c′、131d′,使得收纳单元1保持在导轨22上。当朝输出开口41的方向调节收纳单元1时,在从座椅平面SE一侧的纵向侧22c过渡到输出开口41一侧的侧向段22a时,滑架13′相对于收纳单元1首先顺时针旋转。在沿着侧向段22a向车辆地板FB一侧的纵向侧22d调节时,滑架13′相对于收纳单元1逆时针旋转。
定位设备2和调节机构3布置在机动车结构组件的壳体4之内。为了存放和/或从选定的容器12中取出物品,壳体4包括封闭元件40,该封闭元件布置在壳体4上,用以释放和封闭输出开口41。操纵路径B延伸穿过输出开口41,选定的容器12能沿着该操纵路径移动用以存放和/或取出物品。因此,选定的容器12在沿着操纵路径B移动时穿过输出开口41。
壳体4还包括操作元件42,利用该操作元件能选定容器12、12a、12b、12c、12d、12e,用以由机动车结构组件的使用者存放和/或取出物品。操作元件42布置在封闭元件40上并且例如可以包括触摸显示器。原则上,机动车结构组件可以包括大量操作元件42,它们可以任意地布置在机动车结构组件上。
图11示出了如下实施例,在其中,后排一侧的选定的容器12和仪表板A一侧的另外的容器12b可供机动车的乘员使用,用以存放和/或取出物品。另外的容器12b可以经由壳体4中的另外的输出开口41a接近。
图12A和12B示出了机动车座椅S′、S″的两种可能的布置方案,其中一个机动车座椅S′被构造为副驾驶员座椅,并且另一个机动车座椅S″被构造为后排座椅。在图12A中的第一布置方案中,机动车座椅S′、S″以如下方式取向,即,使得以预定方式坐在机动车座椅S′、S″上的使用者的取向为机动车的前进方向。副驾驶座椅S′的使用者于是可以拿取选定的容器12b。在第二布置方案中,副驾驶员座椅S′绕垂直于车辆地板FB的轴线转动了180°。因此,以预定方式坐在副驾驶员座椅S′上的使用者的取向为机动车的后退方向。因此,使用者向后排看。例如,第二布置方案使后排的乘员能够面对面与副驾驶员座椅S′的使用者互动。副驾驶员座椅S′的使用者也可以拿取选定的容器12。
附图标记列表
1、1a、1b、1c、1d、1e 收纳单元
11、11a、11b、11c、11d、11e 载体
110 开口
111、112 导轨
12、12a、12b、12c、12d、12e 容器
13、13′、13a 滑架
131a、131b、131c、131d、131a′、131b′、131c′、 滚子元件
131d′、131aa、131ab、131ac、131ad
132、132a 联接元件
2 定位设备
21、22 导轨
21a、21b、22a、22b 侧向段
21c、21d、22c、22d 纵向侧
23、24 牵引构件
23a、23b、24a、24b 偏转元件
3 调节机构
30 操纵元件
300 钩区段
301 磁构件
302 引导区段
31 操纵元件
311 滑槽引导部
3110 枢转区段
312 螺杆
313 驱动器
4 壳体
40 封闭元件
41 输出开口
41a 另外的输出开口
42 操作元件
A 仪表板
B 操纵路径
BE 地板平面
D1、D2 转动轴线
S、S′、S″ 机动车座椅
SE 座椅平面
SP 起点
EP 终点
FB 车辆地板
R 移动方向
V 调节体积
ZE 中间平面
- 用于布置在车辆地板上的机动车结构组件
- 用于车辆、尤其是机动车的车轮的轮辋的护板,护板在车辆的车轮的轮辋上的布置结构及车辆