一种低姿态岸桥力矩自动调节制动器系统
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种港口装卸设备,更具体地说,涉及一种低姿态岸桥力矩自动调节制动器系统。
背景技术
岸桥是集装箱装卸过程中的主要设备,在装卸过程中扮演着十分重要的角色。因历史地理条件限制和多式集疏运考虑,世界许多集装箱码头(如意大利VTE、奥克兰港、美国EVERGLADES港、波士顿港、高雄港等)建在机场附近,致使整个码头处于航空线下方,因此对起重机设备高度有严格限制,贸易港口期望配备低姿态集装箱运输设备的需求越来越迫切。目前随着船舶的运载能力的提高,如何在保证整机高度有特定限制的情况下尽可能获得吊具下足够的起升高度,成为了此类码头用户非常关心的重点,发展新一代低姿态起重机,适应新要求,显得相当重要。
制动器系统为岸桥部件中最重要的子系统之一,是整机设备、特别是各主驱动机构的安全性和可靠性的基本保障。常规岸桥及老一代低姿态岸桥的大车和小车(自行式小车)高速制动器和低速制动器的设定力矩为单一恒定值。制动器的制动能力受轮压引起的最大静摩擦力限制,当起重机或小车(自行式小车)发生紧停时(作业中时常发生),由于制动器设定值太大,轮压较小处的车轮会经常打滑,导致车轮踏面很快磨坏或烧坏。
岸桥作业工况繁多,循环作业过程中大车车轮或小车(仅限自行式)车轮轮压变化浮动范围大,且时大时小。
发明内容
针对现有技术中存在的上述缺陷,本发明的目的是提供一种低姿态岸桥力矩自动调节制动器系统,根据轮压大小,在紧停前自动调整其设定值,从而保证起重机及各零部件的安全性和可靠性。
为实现上述目的,本发明采用如下技术方案:
一种低姿态岸桥力矩自动调节制动器系统,包括:
PLC控制器,根据岸桥的实时工况计算出不同工况下每个角的轮压并定义对应的事件,当发生紧停故障时所述PLC控制器判断所述岸桥处于哪种所述事件,并发出指令,确定需要设定的制动力矩值;
制动器,与所述PLC控制器之间实时通讯数据传输,接收所述PLC控制器的制动力矩值,实现动态制动;
不间断电源,与所述PLC控制器之间实时通讯数据传输,并与所述制动器之间电连接。
较佳的,所述制动器包括高速制动器和低速制动器。
较佳的,所述高速制动器采用配有开关阀、比例阀的电液推进器。
较佳的,所述低速制动器采用推杆式动力站。
较佳的,所述推杆式动力站包括比例阀,以及与其相连的两个夹轮器。
较佳的,所述岸桥的实时工况包括大梁的位置、小车的位置、起吊载荷大小、风速仪检测的风速和风向。
较佳的,所述制动器根据所述岸桥上轮胎的电机的得电、失电而对应打开、闭合。
本发明所提供的一种低姿态岸桥力矩自动调节制动器系统,既保证了安全性,又避免设备在发生故障紧停时上车轮打滑导致过渡磨损或损坏。
附图说明
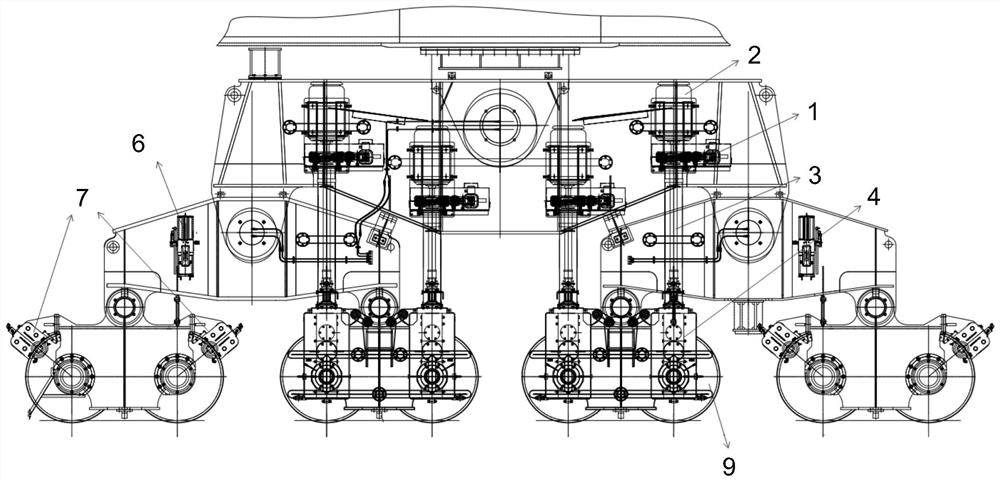
图1是本发明低姿态岸桥力矩自动调节制动器系统在大车上的布置示意图;
图2是本发明低姿态岸桥力矩自动调节制动器系统中高速制动器的示意图;
图3是图2中Z向的示意图;
图4是本发明低姿态岸桥力矩自动调节制动器系统中低速制动器的示意图;
图5是本发明低姿态岸桥力矩自动调节制动器系统中不间断电源与制动器之间的电连接示意图;
图6是本发明低姿态岸桥力矩自动调节制动器系统中PLC控制器的端口连接示意图。
具体实施方式
为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
本发明所提供的一种低姿态岸桥力矩自动调节制动器系统,包括:
PLC控制器,根据岸桥的大梁的位置、小车的位置、起吊载荷大小、风速仪检测的风速和风向,计算出不同工况下每个角轮胎的轮压并定义对应的事件,当发生紧停故障时由PLC控制器判断岸桥处于哪种事件,并发出指令,确定需要设定的制动力矩值;
制动器,与PLC控制器之间实时通讯数据传输,接收PLC控制器的制动力矩值,实现对轮胎的动态制动;
不间断电源(UPS),与PLC控制器之间实时通讯数据传输,并与制动器之间电连接。
结合图1所示,制动器包括高速制动器1和低速制动器。
岸桥上的轮胎由电机2驱动,电机2通过联轴器3连接减速箱4,减速箱4与轮胎连接。
高速制动器1安装于岸桥的轮胎电机2上,用以对轮胎电机2进行动态制动,低速制动器安装于岸桥的轮胎架上,用以对轮胎9进行动态制动。
结合图2和图3所示,高速制动器采用配有开关阀、比例阀的电液推进器5,通过电机2的得电和失电实现高速制动器的打开和闭合。
结合图4所示,低速制动器采用推杆式动力站。
推杆式动力站包括比例阀6,以及与其相连的两个夹轮器7,一个比例阀6控制两个夹轮器7,也通过电机2的得电和失电实现低速制动器的打开和闭合,两个夹轮器7实现对轮胎9进行动态制动。
结合图5所示,不间断电源(UPS)在起重机电源因故失电或故障断电情况下,为高速制动器、低速制动器配置的不间断电源,可为本发明持续短时续电,与岸桥主PLC之间通过通讯接口(通讯协议)实现实时数据传输,以获取整机断电前的各种信号/数据,通常,该不间断电源可安装在制动系统控制柜内。
结合图6所示,本发明低姿态岸桥力矩自动调节制动器系统中的PLC控制器与岸桥上主PLC100之间通过Profinet(工业以太网)通讯的物理接口8及通讯协议,与主PLC100进行实时数据传输,在获取岸桥的大梁位置、小车位置、起吊载荷、风速和风向等信息的同时,可向岸桥输出控制逻辑和数据,对岸桥的制动力矩自动调节实现闭环控制。
本发明低姿态岸桥力矩自动调节制动器系统中高速制动器、低速制动器的设置参数如下表:
不同工况下,岸桥四个角轮胎负载如下表:
将本发明低姿态岸桥力矩自动调节制动器系统布置于如图1所示的起重机的大车上(实施例仅以大车为例,自行式小车类同),发生失电或故障紧停时,整机虽然已断电,但是本发明能借助所配置的不间断电源(UPS),短时续电并获取紧停时PLC控制器中的具体对应的事件,并得知需要的设定力矩值,然后发出指令给高速制动器和低速制动器上的比例阀,实现瞬时力矩值的设定,从而防止车轮的过度磨损,并能安全制动。
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
- 一种低姿态岸桥力矩自动调节制动器系统
- 一种低姿态岸桥力矩自动调节制动器系统