肠选择
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及一种用于确定天然肠大小和/或选择天然肠的系统。本发明进一步涉及一种用于确定天然肠大小和/或选择天然肠的方法。
背景技术
使用肠衣或天然香肠皮处理天然肠的方法是已知的。例如,WO2014016636描述了一种制备具有均匀口径的天然肠衣的方法。该方法基于对天然肠衣进行酸处理,然后进行碱处理,然后在具有所需口径的柔性可膨胀支撑件上在温和温度下干燥。该文献还描述了可通过所述方法获得的天然肠衣、其用于制备填充产品的用途以及将其作为表皮的填充产品。
此外,例如,W002020002208涉及一种用于自动分类天然肠/肠衣的系统和方法,所述肠衣用于生产食品,特别是作为香肠肠衣。US2433557A描述了一种用于检查柔性管状肠衣的直径的装置,更具体地涉及一种将测量和指示柔性肠衣的直径的光电定大小机构。该装置适合于测量和指示任何柔性肠衣的直径,并且特别适合于指示香肠肠衣等的大小。被测试的肠衣可以是合成肠衣,也可以由动物肠衣制成。FR1087429A进一步描述了一种用于从动物肠中确定肠大小的方法和设备。
发明内容
香肠肠衣,也称为香肠皮或简称肠衣,是用来包裹香肠馅的材料。天然肠衣由动物肠制成,因此可能具有不同的口径,即肠衣的直径可能不同。直径可能取决于动物的类型,但也取决于提供肠的个体动物。直径可以沿着肠的长度进一步改变。肠子或肠衣通常来自猪(家猪),但也使用绵羊、山羊、牛的肠子,有时也使用马的肠子。天然肠衣通常由小肠的粘膜下层制成,即主要由天然胶原蛋白组成的肠层。为了制备肠衣,需要冲洗、刮除肠衣并用水和盐清洗。在加工过程中去除外层脂肪和内粘膜衬里。清洗后,清洗后的肠衣(也称为“清洗过的肠衣”)通过选择(和腌制)和包装进行进一步加工。在选择过程中,制备好的肠子或肠衣会基于其直径进行分类。同时,可以执行质量检查。可以去除低质量的部分,例如,包括诸如孔洞、破裂的缺陷、(内)粘膜的残余物的存在、肠外的脂肪和/或膜的残余物的存在或肠外的不期望的图案的存在。选择特别是基于肠的质量(参数)。天然肠衣几乎完全以汉克为单位生产和销售,汉克是一个约90米长的计量单位。一汉克可以由长度不同的不同数量的股(单独的部分/肠衣)组成。选择肠衣的大小或口径,大小或口径以毫米为单位进行测量,并且口径指的是肠衣的直径。天然肠衣的大小和用途受其来源的动物的影响。羔羊肠衣的大小可以例如在直径14mm至28mm的范围内,而猪肠衣的大小可以在直径28mm至约58mm的范围内。
定大小和质量检查通常是手工完成的,非常耗费人力。用水填充清洗后的肠,并且每几米确定填充和膨胀/扩张部分的直径。此外,还观察到肠中的缺陷,诸如孔洞。将肠切成具有相同直径的部分,并去除具有缺陷的部分/块。手动处理肠很容易对肠造成损害。手动处理还可能进一步引入测量误差:肠是有弹力的/弹性的,扩张的程度可能取决于肠中提供的水量或水压。如果加入更多的水,直径可能会增加。所确定的直径可能对执行测量的人来说是敏感的。为了降低成本,通常在低工资国家进行定大小和选择。为了最大限度地减少碳足迹,并进一步标准化定大小和分级过程,似乎需要至少部分自动化肠衣/(清洗后的)肠的加工。
因此,本发明的一个方面是提供一种用于确定(天然)肠(或(天然)肠衣)的大小(和/或其选择)的替代系统,其优选地进一步至少部分地消除了一个或多个上述缺点。本发明的进一步方面是提供一种用于确定(天然)肠(或(天然)肠衣)的大小(和/或选择)的方法,其优选地进一步至少部分地消除了一个或多个上述缺点。本发明的目的是克服或改善现有技术的至少一个缺点,或提供有用的替代方案。
在第一方面,本发明提供了一种用于确定(天然)(小)肠(特别是天然肠衣或清洗后的(小)肠的一部分)大小(和/或其选择)的系统。在各实施例中,该系统包括(i)产品载体以及产品输送和密封系统。在进一步的实施例中,该系统(进一步)包括测量系统。此外,特别地,该系统(进一步)包括控制系统。在进一步的具体实施例中,产品载体包括流体通道,特别是测量部分。产品载体包括产品载体表面。特别地,测量部分(的位置)处的产品载体表面包括流体连接到流体通道的一个或多个穿孔(特别是多个)。一个或多个穿孔(中的每一个)可将流体通道与产品载体的表面(在测量部分处)连接。此外,特别地,在各实施例中,产品输送和密封系统被配置为用于在产品载体上(特别是在产品载体的纵向方向上)移动肠。此外,特别是肠(在操作期间)包围(特别是基本上圆形的)产品载体表面(特别是当在产品载体上移动时)。在进一步的具体实施例中,产品输送和密封系统(进一步)被配置为沿着测量部分的至少一部分暂时密封肠(在产品载体处)。在具体实施例中,产品输送和密封系统被配置为在沿着测量部分的至少一部分密封肠(在产品载体处)的同时在产品载体上移动肠。此外,特别地,测量系统功能性地连接到控制系统。在进一步的实施例中,测量系统被配置为测量肠的(可测量的)参数,特别是一个或多个(可测量)参数,特别是(布置)在测量部分处。测量系统可以特别地被配置为在测量部分(的位置)处测量肠的(一个或多个)(可测量的)参数。在具体实施例中,测量系统可以例如包括辐射传感器系统,该辐射传感器系统(特别是(也)功能性地连接到控制系统)用于测量肠的特别是一个或多个(可测量的)参数。在具体实施例中,辐射传感器系统特别被配置用于测量肠的截面直径,特别是(布置)在测量部分处。在进一步的具体实施例中,辐射传感器系统包括辐射源(和辐射检测器,其中辐射源),该辐射源辐射耦合到辐射检测器。特别地,(相对于辐射源,特别是相对于辐射源的辐射)辐射检测器被布置在测量部分的下游。在进一步的具体实施例中,控制系统被配置为基于测量系统的一个或多个信号,特别是(至少)基于辐射传感器系统的信号,确定在测量部分(的位置)处的肠的(一个或多个)质量参数。在进一步的具体实施例中,例如,控制系统被配置为特别是基于测量系统的一个或多个信号,更特别是基于辐射传感器系统的信号,确定测量部分处的肠的截面大小(特别是直径或口径)。
在另一方面,本发明提供了一种用于确定(和/或选择)(天然)肠的大小的方法。在各实施例中,该方法包括在产品载体上提供(天然)肠,特别是其中肠在(产品载体的)测量部分处包围产品载体表面。此外,特别地,该方法包括在测量部分处经由产品载体表面中的一个或多个穿孔在肠(的内部空间)中提供流体,特别是在沿着测量部分的至少一部分密封肠的同时。流体特别可以提供在产品载体表面和肠之间。在各实施例中,肠可以由流体填充/膨胀。在进一步的具体实施例中,该方法进一步包括在产品载体上(在纵向方向上)移动肠。此外,特别是在各实施例中,该方法包括在沿着测量部分的至少一部分密封肠的同时在产品载体上移动肠。该方法可以进一步包括在测量部分处测量肠的(可测量的)参数(/特征),特别是一个或多个(可测量)参数(和/或特征)。测量特别是在该方法的测量阶段进行。在进一步的实施例中,该方法包括由(辐射传感器系统的)辐射源向测量部分发射辐射,并在测量部分的下游位置(相对于辐射源)处用(辐射传感器系统的)辐射检测器感测辐射的至少一部分。该方法特别包括在测量部分处确定肠的一个或多个(局部)质量参数(和/或缺陷)。在各实施例中,该方法可以包括基于辐射检测器的信号(可选地结合辐射源的信号)来确定测量部分处的肠的截面大小(例如,口径或直径)。可以基于辐射传感器系统的信号来确定一个或多个质量参数,特别是截面大小。
因此,本发明在各实施例中提供了一种用于确定(天然)肠的大小(和/或其选择)的系统,其中,该系统包括(i)产品载体,(ii)产品输送和密封系统,(iii)测量系统,和(iv)控制系统;其中,所述产品载体包括流体通道和测量部分,其中,所述测量部分处的产品载体表面包括流体连接到所述流体通道的一个或多个穿孔;其中,所述产品输送和密封系统被配置为(i)用于在所述产品载体上移动所述肠,其中,所述肠包围所述产品承载表面,以及(ii)用于沿着所述测量部分的至少一部分暂时密封所述肠;所述测量系统包括辐射传感器系统(功能性地连接到所述控制系统),所述辐射传感器系统用于测量所述测量部分处的所述肠(布置)的截面尺寸,其中,所述辐射传感器系统包括辐射耦合到辐射检测器的辐射源,其中,所述辐射检测器被布置在相对于所述辐射源的所述测量部分的下游,并且所述控制系统被配置为基于所述辐射传感器系统的信号来确定所述测量部分处的所述肠的截面大小。
在各实施例中,本发明进一步特别提供了一种用于确定(天然)肠的大小(和/或其选择)的方法,其中,该方法包括在产品载体上提供天然肠,其中,该肠在测量部分处包围产品载体表面;在所述测量部分处经由所述产品载体表面中的一个或多个穿孔在所述肠中提供流体;在沿着所述测量部分的至少一部分密封所述肠的同时在所述产品载体上移动所述肠(在纵向方向上);由(辐射传感器系统的)辐射源向所述测量部分发射辐射,并在所述测量部分下游的位置(相对于所述辐射源)处用(所述辐射传感器系统的)辐射检测器感测所述辐射的至少一部分;并且基于所述辐射检测器的信号(和所述辐射源的信号),特别是基于所述辐射传感器系统的信号,确定所述测量部分处的所述肠的截面大小。
利用这种系统和方法,可以沿着所述肠的整个长度确定所述截面大小(或口径),从而允许具有根据所述肠的纵向位置的所述肠的大小。可以在沿着所述测量系统输送所述肠的同时连续地确定所述大小。所述大小可以客观地确定。与用手进行的方法相比,所述肠可以轻轻移动,在这种用手进行的方法中,所述肠必须充满水,并且必须在选择块/选择量规中连续测量。特别是,使用所述选择块移动和确定所述口径可能会引入新的缺陷,如撕裂或裂口。因此,本发明的所述系统可以更温和地处理所述肠,从而减少由处理引起的肠损失。此外,在对所述整个肠进行采样之后,可以将所述肠切成具有基本相同大小的部分。可以首先观察所述肠的大小和/或质量(参数)的改变,并且基于所述整个肠,可以做出关于如何切割所述肠的决定。在所述系统的进一步实施例中,还配置了切割系统,该切割系统可以(自动)基于由该系统确定的质量(参数)对纵向位置,特别是大小(直径)对纵向位置来执行切割。在各实施例中,所述系统允许检测根据所述肠的纵向位置的所述肠中的缺陷。因此,附加地或可替代地,包括缺陷的所述肠的部分可以在对所述肠进行采样之后被去除,例如通过所述切割系统。切割可以基于沿着所述肠的质量(参数)。此外,所述系统允许在任何位置处确定所述肠的大小并选择所述肠,并减少所述肠往返于低工资国家的不希望的运输。在各实施例中,可以基于所述肠的(局部)质量(一个或多个参数)进行分级。
在各实施例中,与所述方法和/或系统相关的术语“确定大小”可涉及校准,特别是确定所述肠的直径,进一步见下文。该术语可能进一步涉及将所述肠切割为部分肠。在各实施例中,确定大小可涉及控制肠的一部分的长度。在进一步的实施例中,该术语涉及选择。在一个方面,本发明提供了如本文所述的用于选择(天然)肠(或(天然)肠衣)的方法(关于确定大小)。在另一方面,本发明提供了如本文所述的用于选择(天然)肠(或(天然)肠衣)的系统(关于确定大小)。因此,术语“选择”可涉及校准。术语“选择”可进一步涉及检查所述肠的质量(或质量参数)。可以从所述肠中去除(切割)低质量的部分,并且可以通过本发明的方法获得特别高质量的部分。此外,术语“分级”也可用于确定所述肠的质量和/或基于所述质量参数(特别是包括所述肠(部分)的大小或口径)来分类/选择肠(部分)。分级特别是指基于所述肠的大小和/或质量进行选择。与肠/天然肠衣相关的术语“选择”、“选用”和“分级”特别可以互换使用。
如上所述,术语“肠衣”(或“清洗后的肠”)等与(小肠)的粘膜下层相关。在本文中,术语“(天然)肠”可用于指代“清洗后的肠”、“清洗后的(天然)肠衣”或“(天然的)香肠肠衣”。这些术语可以互换使用。此外,因为肠基本上是“天然”的,所以也可以仅使用术语“肠”来指代天然肠衣。
因此,本文中术语“肠”可能特别涉及所述肠的粘膜下层。此外,本发明可特别提供一种用于确定(小)肠的粘膜下层的大小(和/或其选择)的系统和方法。因此,术语“肠”可能特别指小肠。
此外,本文中术语“肠”特别涉及(家养)牲畜的肠,诸如绵羊、羔羊、猪(家猪)、牛/家牛或例如马的肠。该系统可以特别地被配置用于加工这些类型的肠中的一种或多种。在各实施例中,该系统被配置用于加工猪(或家猪)肠。在进一步的实施例中,该系统被配置用于加工其他类型的肠(其组合),诸如绵羊肠和/或羔羊肠。这些不同动物的肠之间的差异特别体现在肠的总长度和肠的大小,特别是肠的直径或口径。
因为肠是天然产物,所以肠的截面不一定是完全圆形的,例如可以是椭圆形的。因此,本文中使用的与肠相关的术语截面大小、直径或口径可以特别指具有与肠的截面面积(在截面大小、直径或口径的位置处)相等值/大小的表面积的圆的大小、直径或口径。此外,术语“直径”可以特别指扩张的肠的直径,即填充有流体的肠,诸如在本发明的方法中可以提供给肠的流体。
此外,由于其性质,肠的截面大小可以沿着肠的长度改变。当使用肠作为香肠皮时,直径优选是恒定的。因此,在各实施例中,在加工(清洗)肠的过程中,可以在肠的不同部分切割肠,使得每个部分或股具有基本恒定的直径,诸如在±5mm,特别是±2mm的范围内。例如,在各实施例中,肠的切割部分可以具有40mm±2mm,或35mm±1mm或例如54±1mm(当扩张时)的直径(其他部分可能具有其他直径)。
此外,肠本质上可能是多孔的。然而,在收获和清洗肠时,肠中可能会出现(小)孔/穿孔或撕裂。应当理解,这些类型的缺陷可能对肠衣和最终香肠的产品质量产生负面影响。因此,优选地不要在香肠制作中使用穿孔和/或撕裂等于或大于2mm(在膨胀的肠中)的肠。优选地,识别具有这些类型缺陷的肠的部分,以便它们可以从肠中被去除。因此,在各实施例中,该系统(也)被配置用于检测肠中的穿孔和/或撕裂(见下文)。
本文中术语,如“膨胀”、“扩张”和“填充”等,都与肠有关。这些术语特别涉及根据客观和可再现的程序用流体填充肠。如上所述,当肠中的压力增加时,肠可以是弹性的并且可以进一步扩张。为了比较不同测量值/不同肠子的直径,肠子可以以可再现的方式填充,例如填充到特定的压力。特定的压力可以例如为至少10毫巴(过压),诸如至少30毫巴或至少40毫巴,或甚至更高。最大特定压力特别是100毫巴。在各实施例中,特定压力在20-50毫巴,诸如30-40毫巴(过压)的范围内选择。因此,可以在这种特定压力下提供流体。此外,可以基于实际压力(在测量部分处的肠中)和扩张肠的直径来计算特定压力下的直径。
产品载体可至少暂时承载肠。当承载肠时,肠可以围绕(环绕)产品载体提供。产品载体特别可以具有与肠的形状相对应的形状。产品载体可以是细长的。产品载体特别包括纵向轴线。然而,产品载体的总长度可以小于肠的总长度。肠可以例如在产品载体周围起皱,特别是只有被分析/测量的肠的一部分可以膨胀到其正常尺寸。在各实施例中,产品载体的总长度可以在40-200cm,诸如40-150cm,特别是50-100cm的范围内。然而,在各实施例中,长度可以超过2m。产品载体可以进一步具有圆形截面,以便于肠在产品载体上移动,特别是防止在产品载体上方移动时损坏肠。产品载体表面可以进一步是光滑的,没有明显的边缘。在各实施例中,产品载体(表面)是略圆的。在进一步的实施例中,产品载体(表面)是圆形的。在各实施例中,产品载体的直径在10-70mm,特别是10-50mm,诸如10-40mm,特别是13-35mm,诸如15-30mm的范围内。此外,为了防止损坏肠,可以减少移动肠时的摩擦。在各实施例中,例如,产品载体表面可以被抛光或可以包括涂层,例如聚合物涂层,诸如聚四氟乙烯(PTFE)涂层。产品载体的光滑表面可进一步(也)有助于在产品载体表面处密封肠而不损坏肠。产品载体可被构造为耐水,特别是耐含盐(氯化钠)的水。在进一步的实施例中,产品载体包括不锈钢和/或聚合物材料。
此外,产品载体特别是至少部分中空的。产品载体可以在产品载体内部具有中心空腔或流体通道(平行于产品载体轴线)。产品载体在产品载体的第一端处特别封闭。流体通道可以被构造用于(在产品载体的另一端处)连接到流体供应装置,特别是液体供应装置,甚至更特别是水供应装置。在进一步的实施例中,流体可以包括气相,诸如空气。因此,流体供应装置可以进一步包括空气供应装置。因此,在各实施例中,产品载体可以是管状元件,其中一个或多个穿孔通过管状元件的流体通道流体连接。管状元件特别包括不锈钢,特别具有聚合物涂层。
产品载体进一步被构造用于在被测量/分析时支撑(承载)肠。因此,在各实施例中,产品载体的一部分,特别是纵向部分,包括或限定测量部分。测量部分可包括一个或多个穿孔,其允许在包围产品载体的肠中引入流体。在具体实施例中,测量部分包括一个或多个穿孔,该穿孔在测量部分处将流体通道与产品载体表面流体连接。一个或多个穿孔特别构造在产品载体的位置之间,所述产品载体被构造用于在产品载体处密封肠。这样,当流体经由一个或多个穿孔被提供给布置在测量部分处的肠并且肠在产品载体处被密封时,肠可以保持流体并且可以膨胀。当被膨胀时,可以在测量部分处分析或测量肠。流体通道被特别构造用于将一个或多个穿孔连接到流体供应装置。
测量部分可以包括两个或更多个穿孔。两个或更多个穿孔中的两个之间的最大距离(平行于产品载体确定)可以是最大10cm,诸如最大5cm,特别是最大2cm,更特别是最大1cm。在各实施例中,至少三个穿孔,诸如至少4个穿孔,甚至更特别是至少5个,诸如5-20个,特别是5-10个穿孔沿着与产品载体的长度轴线(“产品载体轴线”)平行的线进行构造。在各实施例中,两个(相邻)穿孔之间的最小距离为至少0.2cm,诸如至少0.5cm,特别是至少1cm。例如,在各实施例中,7个穿孔被构造为在平行于产品载体轴线的单个线处沿线均匀分布,特别是其中第一个穿孔和最后一个穿孔之间的距离约为3-10cm,并且其中,相邻配置的穿孔之间的距离为0.5-1.5cm。当有多于两个穿孔时,在进一步的实施例中,穿孔基本上没有平行于产品载体确定的相互距离,并且可以被构造为围绕产品载体轴线径向分布。因此,基本上可以有垂直于产品载体的长度轴线的单个区段,其中构造了两个或更多个穿孔。例如,四个穿孔可以构造有90°的相互角度。在进一步的实施例中,穿孔平行于产品载体轴线分布以及围绕产品载体轴线径向分布。此外,特别是穿孔的总流通面积(全部在一起)可以被构造为大于流体通道的流通面积。在各实施例中,穿孔的总截面积可以大于(产品载体中的)流体通道的截面积。术语“截面积”特别是指流通面积。流体通道的截面积特别由垂直于产品载体(特别是流体通道)轴线(在穿孔位置处)的(内部)面积确定。
在本文中,术语“测量”和“分析”可以互换使用。这些术语特别涉及测量一个或多个(可测量的)参数,特别是使用测量系统。测量可能包括感测。测量可以包括使用传感器来感测参数/特征。所测量的参数/特征可以例如包括肠处的图案或肠内或肠外粘膜和/或膜的存在。测量可以进一步包括组合感测的特征以提供测量的参数。进一步基于所感测的特征和/或所测量的参数,可以由测量系统或诸如控制系统的另一系统确定另一参数。在各实施例中,与参数相关的术语“可测量的”和“被测量的”可以指可感测和/或可测量的参数和/或特征。
为了清楚起见,本文将测量系统解释为测量或感测可测量参数,并且使用另一系统来进一步处理,诸如转换和/或组合由测量系统提供的一个或多个信号。应当理解,在各实施例中,这种另一系统可以是测量系统的一部分。测量系统(和/或测量系统的元件)特别功能性地连接到另一系统,特别是连接到控制系统。在各实施例中,测量系统的信号可以包括测量系统的不同元件的组合信号或例如已经预处理的信号。附加地或可替代地,测量系统的一个或多个信号可以包括测量系统的元件(例如辐射传感器系统的元件)的一个或多个信号。
因此,在各实施例中,测量系统可以被构造为在测量部分处测量肠的截面尺寸并生成对应的信号。控制系统可以被配置为基于该(对应的)信号来确定测量部分处的肠的截面大小。
与两个元件之间的连接相关的术语“功能性地”可能特别涉及允许信息(诸如信号和数据)从一个元件到另一个元件的传输,并且可选地反之亦然。信息的传输可以被配置为有线的。在进一步的实施例中,传输可以是无线的。因此,该系统可以包括用于在系统的元件之间传输信息的一个或多个发射器和接收器。
如上所述,在各实施例中,辐射系统可以被配置用于在测量部分(确定的位置)处测量肠的截面尺寸。辐射源可以在测量部分的方向上发射或辐射辐射,并且辐射检测器可以检测(至少部分)测量部分下游的辐射。如果在辐射源和辐射检测器之间存在(填满的)肠,则与不存在肠的情况相比,更少的发射辐射可以到达(入射)检测器。因此,辐射的量和辐射相对于发射的辐射发生的位置(在辐射检测器处)以及辐射源发射的辐射的位置可用于提供肠的信息。用于测量/和/或感测肠参数的测量部分(确定的位置)也可称为“测量位置”。
辐射可以包括可见光。附加地或可替代地,辐射可以包括红外光和紫外光中的一种或多种。
布置在辐射源和辐射检测器之间的肠可以在肠的下游位置(相对于辐射源)提供阴影。因此,在各实施例中,辐射传感器系统是阴影传感器系统(包括辐射源和辐射检测器)。辐射源和辐射检测器特别被配置为辐射源和放射检测器的集合(或组合)。需要注意的是,术语“阴影”包括完全阻挡光(辐射)以及部分阻挡辐射。
在各实施例中,辐射源和辐射检测器可以被配置为固定(固定)在系统中。在进一步的具体实施例中,辐射源和辐射检测器中的一个或多个可以被配置为移动的。例如,辐射源可以被配置为可相对于辐射检测器移动,以感测从不同位置(仍然在测量部分的上游)发射的(入射)辐射。类似地,辐射检测器可被配置为可相对于辐射源移动,以感测相对于测量部分在不同位置处的入射辐射。可替代地,辐射检测器和辐射源都可以相对于测量部分移动。特别地,辐射检测器和辐射源中的一个或多个可在平面内移动。在各实施例中,辐射检测器和辐射源中的一个或多个可以被配置为围绕产品载体的纵向轴线可旋转。在这样的实施例中,特别是可以测量肠的至少部分周长。在进一步的实施例中,可以测量截面尺寸。
在进一步的实施例中,辐射源被配置为固定的(静止的),并且特别地,辐射检测器也被配置为固定的(静止的)。这样的实施例可以特别与其中辐射源被配置用于以二维光束发射辐射的实施例相结合。这种二维光束可以包括连续光束或例如多条平行辐射线。二维光束可以包括辐射(或光)幕。二维光束特别不会在下游方向上发散或会聚。辐射检测器可以被配置用于检测沿着线的至少一部分的入射辐射。在各实施例中,辐射检测器可以包括线检测器。线检测器可以感测二维光束,特别是如果线检测器的轴线(沿着线)被配置为平行于二维光束的轴线。线检测器可以特别被配置为与辐射源辐射耦合(超过线检测器的功能(即,被配置用于感测辐射)表面的至少10%,诸如至少50%或更多)。在进一步的具体实施例中,辐射检测器特别包括用于检测辐射的至少一部分的辐射检测元件(或像素)的阵列,特别是一维阵列。辐射检测元件特别被配置为沿着线彼此相邻。辐射检测元件的(一维)阵列特别地平行于辐射源的二维光束从其发射(耦合出)的面布置。在进一步的实施例中,辐射检测元件可以布置在平面中。
因此,在进一步的实施例中,辐射源被配置用于以二维射束发射辐射,并且辐射检测器包括用于检测辐射的至少一部分的辐射检测元件的(一维)阵列。对于这样的实施例,基本上可以测量肠的截面尺寸。在具体实施例中,辐射源包括激光光幕发射器,辐射检测器包括线激光检测器。使用这种激光光幕系统,可以获得高分辨率(例如高达微米范围)。
在又一实施例中,测量系统包括如上所述的辐射源和辐射检测器的多于一个集合(或组合),特别是其中相应集合的辐射源被配置用于提供在不同角度相互的相应二维光束,特别是在测量部分的同一纵向位置处。在各实施例中,例如,测量系统包括两个集合,并且相应的二维光束被提供为基本上彼此垂直。在进一步的具体实施例中,测量系统包括(i)辐射源和(ii)辐射检测器的两个集合,其中,测量系统被配置用于在测量部分(的同一纵向位置)处以相互角度(α)提供两个集合的辐射源的二维光束,特别是其中角度(α)在60°-120°,特别是在80°-100°的范围内,甚至更特别是在85°-95°的范围内进行选择。使用这种测量系统可以有助于将所测量的非圆形截面的两个截面尺寸加工为(肠的)圆形截面尺寸的平均尺寸。
在本文中,术语“辐射源”和“辐射检测器”可以分别指多个(不同的)辐射源和/或辐射检测器。同样,术语测量系统可以指一个以上的测量系统。
辐射源和辐射检测器之间的肠的存在可以至少部分地阻挡辐射。然而,取决于例如肠的透明度,并非所有辐射都可以被阻挡。此外,辐射传感器系统还可以感测辐射源和辐射检测器之间的其他元件的存在。其他元件的示例是例如产品载体(没有肠)本身、肠内粘膜的残余物、肠表面的膜和/或脂肪组织的残余物和水滴。在各实施例中,辐射传感器系统例如(也)感测流体,特别是从肠喷射的液体的存在。因此,在进一步的实施例中,辐射传感器系统(进一步)被配置为在测量部分处感测离开肠的流体。附加地或可替代地,辐射传感器(进一步)被配置用于感测空产品载体、脂肪组织和/或连接到肠的膜中的一个或多个。在各实施例中,辐射传感器可进一步被配置用于感测(在测量部分处)肠中的粘膜。在各实施例中,与仅通过粘膜下层传输的辐射相比,肠内粘膜的存在可致使通过肠传输的辐射更少。
辐射检测器和辐射源是辐射耦合的,特别是其中辐射源被配置在测量部分的上游并且辐射检测器被布置在测量区段的下游。这并不一定意味着测量区段总是物理地布置在辐射源和辐射检测器之间。辐射可以例如被其他元件反射,例如被一个或多个反射镜反射。在各实施例中,测量部分可以物理地布置在反射辐射的反射元件之间。特别地,辐射源和辐射检测器被配置为使得由辐射源发射的辐射可以部分地通过测量部分并连续地撞击在辐射检测器处,其中发射的辐射的另一部分可以撞击/入射在测量部分处。
在测量肠的一个或多个可测量参数期间(利用辐射传感器系统),可以向肠(在肠中)连续提供流体。在测量部分处的肠中的流体压力可能不是恒定的。因此,所测量的截面尺寸可能随时间而改变。此外,当肠中存在孔洞或撕裂时,这可以显著降低测量部分处的流体压力。因此,在各实施例中,测量系统进一步包括(i)用于感测流体通道中的流体的流体压力的压力传感器和(ii)用于感测量流体通道中流体的流体流量的流量传感器。基于流体通道中的流体压力和流体流量,可以校正测量部分处的压力波动。测量部分处的压力可由流体通道中的流体压力和流体通道上的压降确定,该压降是通道中流体流量的函数。基于在测量部分处确定的压力和所测量的截面尺寸,可以确定肠(在测量部分处)的截面大小。
术语“截面大小”特别指在上述特定压力下膨胀的肠的大小,特别是直径。因此,截面大小可以是标准化的大小。截面大小可以沿着肠的长度改变。肠的不同纵向位置处的截面大小可以彼此不同。因此,截面大小可以不同于截面尺寸。
如上所述,控制系统不一定是单个物理设备。在各实施例中,术语“控制系统”可以指多个(不同的)控制系统。多个控制系统(的部分)可以配置在系统的不同位置处。在各实施例中,例如,一个或多个控制系统(的部分)是测量系统的元件的一部分。多个控制系统特别可以功能性地彼此连接。
控制系统可用于基于测量系统(的一个或多个信号)确定肠的一个或多个质量参数。控制系统可包括数据存储系统,该数据存储系统用于存储例如作为(测量)时间的函数的质量参数。测量系统的元件特别在测量部分处测量肠的(可测量)参数。更具体地,所述参数在存在于测量部分处的肠的纵向位置处进行测量。因此,在特定时间测量的参数也可以与肠的特定纵向位置相关。在各实施例中,控制系统被配置用于确定和存储根据肠的纵向位置的肠的一个或多个质量参数。控制系统可以基于测量系统的一个或多个信号来确定测量部分处的肠的一个或多个质量参数,并且特别地将这些一个或多个质量参数与肠的纵向位置相关。因此,该系统可以允许将一个或多个质量参数与肠的纵向位置相关。
术语“质量参数”可以指不止一个不同的质量参数。质量参数的示例是截面大小,特别是肠的直径,以及(在确定的肠的纵向位置处)空腔的存在(或不存在)。质量参数的其他示例是胃的部分(出口)的存在(或不存在),其可以作为肠处的特定胃模式来观察,肠内粘膜的存在(或者不存在)以及肠表面处脂肪组织和/或膜的残余物的存在(不存在)。在本文中,上述特征的存在也可称为“缺陷”。此外,术语“缺陷”还包括切口、撕裂、空腔等的存在。
在各实施例中,控制系统被配置为基于测量系统的一个或多个信号来确定肠(在测量部分处)的截面大小。在进一步的实施例中,控制系统被配置用于基于测量系统的一个或多个信号来确定肠(在测量部分处)中一个或多个空腔(包括撕裂和切口)的存在(或不存在)。控制系统特别被配置用于基于测量系统的一个或多个信号来确定肠(在测量部分处)的一个或多个质量参数(值)。
因此,在进一步的实施例中,辐射传感器系统(进一步)被配置用于感测在测量部分处离开肠的流体,其中,控制系统(进一步)被配置用于基于测量系统的一个或多个信号确定测量部分处肠中的一个或多个空腔的存在(或不存在),特别是基于辐射传感器系统的信号。
在进一步的实施例中,测量系统进一步包括(i)用于感测流体通道中的流体的流体压力的压力传感器和(ii)用于感测量流体通道中流体的流体流量的流量传感器,特别是在各实施例中,测量系统的一个或多个信号基于以下信号中的一个或多个:(i)辐射传感器系统的信号,(ii)压力传感器的信号和(iii)流量传感器的信号。因此,在各实施例中,控制系统被配置为基于以下信号中的一个或多个来确定肠的截面大小和肠中一个或多个空腔的存在中的一个或多个:(i)辐射传感器系统的信号、(ii)压力传感器的信号和(iii)流量传感器的信号。
在进一步的实施例中,测量系统可以包括一个或多个其他传感器系统。在各实施例中,例如,测量系统可以包括用于测量或感测肠的参数或特征(在测量部分处)的视觉感测系统、视觉系统和/或相机系统。例如,肠处的图案或肠处的脂肪组织或膜的残余物可以由视觉系统感测,可选地与辐射传感器系统相结合。控制系统可以被配置为基于其他传感器系统的信号(可选地与测量系统的其他元件的一个或多个信号组合)进一步确定一个或多个质量参数。术语“其他传感器系统”可以指多个(不同的)其他传感器系统。
在进一步的实施例中,该系统包括用于感测或确定(与控制系统结合)肠的纵向位置的位置系统。基于位置系统(包括控制系统的一部分或功能上耦合到控制系统),可以确定肠在测量部分处的纵向位置。该位置系统可以包括用于在位置感测位置处感测肠的纵向位置的位置传感器。位置感测位置基本上包括由位置传感器感测的肠的纵向位置,并且在各实施例中可以包括位置传感器的位置。在进一步的实施例中,位置传感器可以在位置传感器位置处感测肠的速度。在各实施例中,位置系统可以包括感测通过位置系统的肠的速度的位置系统。位置系统可以涉及远程感测,诸如声学感测位置或速度。位置系统可以基于辐射感测,诸如通过红外辐射。在进一步的实施例中,传感器系统可以基于肠和位置系统之间的物理接触。位置系统可以例如包括测量轮系统。这种测量轮系统包括连接到用于感测轮的旋转速度的传感器或编码器的轮或任何其他可旋转元件。通过在轮(表面)上移动肠(并接触轮),轮将旋转,可以确定肠的速度。
因此,在进一步的实施例中,该系统(进一步)包括位置系统(功能性地连接到控制系统),该位置系统包括位置传感器,该位置传感器用于感测以下中的一个或多个(i)在肠的位置感测位置处、特别是在位置传感器(的位置)处的肠的纵向位置,以及(ii)肠的位置感测位置处、特别是位置传感器(的位置)处的肠的速度。进一步特别地,控制系统(进一步)被配置用于基于位置传感器的信号来确定测量部分处的肠的纵向位置。位置系统特别包括测量轮系统,该测量轮系统包括测量轮,其中,所述测量轮系统被配置用于感测与所述测量轮接触的肠的纵向位置。
在进一步的实施例中,该系统进一步包括张力施加元件(布置在测量轮的上游),该张力施加元件被配置为在测量轮处保持肠上的张力。张力施加元件可以防止肠在测量轮的表面处滑动。此外,通过以预定的力拉紧肠,肠可以被拉伸超过已知的百分比。初始张力增加后,长度的相对改变减小。因此,张力施加元件可以提供最小的预定张力。在各实施例中,张力可以是至少10牛顿,诸如至少15牛顿。所提供的张力特别可以不超过25牛顿。在各实施例中,张力施加元件可以被配置为在测量轮的上游引导肠,特别是增加肠和测量轮之间的接触面积。张力施加元件可以包括摩擦元件,该摩擦元件被配置用于接触肠(测量轮的上游)。张力施加元件可以包括用于接触肠的粗糙表面。在各实施例中,张力施加元件包括用于接触肠的刷子。
本文中使用了术语“上游”和“下游”,如“检测器被配置在测量位置的下游(相对于辐射源)”、“张力施加元件被布置在测量轮的上游”以及“肠在空腔的切割下游”。术语“上游”和“下游”涉及与元件(诸如颗粒或流体)在通道中的传播相关的项目或特征、或例如沿着工艺线的肠、或光/辐射束中的光/辐射(在操作期间)的布置,其中,相对于通道内/沿着工艺线或光束内的第一位置,通道中/沿着工艺线或光束内更靠近通道/工艺线的入口/进料(用于元件、流体或肠)或更靠近光产生装置/辐射源的第二位置分别为“上游”,而通道内/沿着工艺线更远离入口或进料段、或远离光产生装置的第三位置分别为“下游”。因此,在操作期间,肠可以从上游位置移动到下游位置。当沿着工艺线从肠的运动方向观察时,肠的纵向位置的范围从上游侧到下游侧。如果移动或传播方向改变,上游侧和下游侧也会改变。此外,辐射可以从上游侧的辐射源传播到下游侧的辐射检测器。
该系统被配置用于在产品载体的一个或多个位置处至少部分地密封产品载体处的肠。特别是在(产品载体的)至少第一密封位置和(产品载体的)与第一密封位置间隔开的第二密封位置处提供密封。此外,可以沿着产品载体的至少一部分周长提供密封。密封可以例如沿着产品载体的至少50%,诸如沿着至少70%,特别是沿着至少90%的周长(例如在第一和第二密封位置处)提供。在各实施例中,可以沿着产品载体的基本整个周长提供密封。在各实施例中,所述一个或多个穿孔的至少一部分,特别是全部被配置在所述第一密封位置和所述第二密封位置之间。在这样的实施例中,流体可以被提供(进入)到肠中,以用于在第一密封位置和第二密封位置之间,特别是在第一密封和第二封闭之间填充和扩张肠(和/或保持肠的扩张)。在各实施例中,可以通过一个或多个穿孔连续地提供流体。密封不一定将肠密封地密封到产品载体上。
在本文中,与将肠密封到产品载体上相关的术语“密封”、“密闭”等特别涉及封闭肠和产品载体之间的一个或多个通道,使得当连续地仅向肠提供少量流体以在肠的扩张部分中获得基本恒定的体积(例如100-200ml)时可以保持肠的扩张(在密封之间)。在各实施例中,基于流体通道中的流体的流体压力来提供流体(如果压力低于预定设定点(特别是低于特定压力),则可以提供流体)。在各实施例中,例如在肠可以保持其扩张构造的同时,一些流体可以经由密封脱逸。
密封可以设置有密封元件。特别地,密封元件还允许肠在产品载体上输送(移动)。在各实施例中,每个密封元件包括与产品载体(表面)的(截面)形状互补的形状。产品载体的形状可以例如是圆形的(也参见上文),并且密封元件可以包括圆形开口。圆形开口的直径特别大于产品载体的直径,从而允许肠在产品载体和密封元件之间移动。在进一步的实施例中,密封元件可以由多个子元件形成,其中,子元件的总数限定了与产品载体的形状互补的形状。在各实施例中,例如,密封元件包括两个子元件,这两个子元件都包括槽,特别是细长槽。细长槽(在截面图中)可以特别限定圆形开口的一半。通过用槽彼此面对的两个子元件封闭产品载体(连同肠),可以形成具有圆形开口的密封元件(类似于上述开口)。上述元件特别可以是滑动密封元件,即当肠在元件中移动(沿纵向方向)时,肠可以在槽的表面上滑动。在又一实施例中,子元件中的一个包括这样的滑动密封子元件,该滑动密封子元件包括细长槽,并且子元件中的第二子元件包括可旋转元件,诸如轮,特别是还包括(周向)槽。当在产品载体处围绕肠布置这些子元件时(槽彼此面对),也可以提供密封。在各实施例中,第一密封元件和/或第二密封元件可以包括滑动密封子元件,其与包括周向槽的轮相结合。当在产品载体上移动肠时,轮可能会旋转。此外,在这种实施例中,旋转轮可以使肠在产品载体上移动。因此,在各实施例中,一个或多个轮被配置为被驱动。因此,密封系统可以特别用作产品输送系统和密封系统。在又一实施例中,每个密封元件包括两个子元件,这两个子元件都包括包括周向槽的轮。
因此,在进一步的实施例中,产品输送和密封系统包括第一组(可旋转)轮和第二组(可旋转)轮,其中,每个轮包括具有周向槽的表面,该周向槽具有与产品载体的表面形状互补的形状。特别地,第一组轮和第二组轮中的一个或多个被配置用于在产品载体上移动肠。特别地,至少一个轮被配置为被驱动。所述轮特别被配置用于提供密封,以用于将肠保持在如上所述的扩张构造中。因此,特别是第一组轮和第二组轮被配置用于在产品载体处密封肠。第一组轮可以例如被配置用于在第一密封位置处提供密封,而第二组轮可以被配置用于在第二密封位置处提供密封。
在进一步有利的实施例中,至少一个轮被配置为(平移)可移动,特别是暂时不密封产品载体处的肠。这可以允许空气在测量部分处从肠中逸出,例如,当用液体填充肠时。特别是在开始该过程时,让任何空气逸出可能是有用的。在使空气从肠中逸出之后,可以用液体填充肠,特别是可以将至少一个轮朝向轮组的另一个轮移动以限定密封。因此,在各实施例中,第一组轮和第二组轮中的一个或多个轮中的至少一个被配置为相对于相应轮组的另一个轮(平移)移动,以暂时不在产品载体处密封肠。
在进一步的实施例中,该系统进一步包括切割系统。切割系统特别被配置用于基于肠的(局部)质量(参数),诸如局部外观缺陷或肠口径的改变来切割肠。在各实施例中,切割系统被配置用于将肠切割成具有确定直径的部分或股。切割特别是在切割阶段进行。在进一步的实施例中,切割系统可以被配置用于去除不满足(所需的)一个或多个质量参数(值)的肠部分。切割系统可被配置为去除具有缺陷的肠的部分,诸如穿孔、空腔、切口和撕裂(和/或上述其他缺陷)。切割系统可以功能性地连接到控制系统。在各实施例中,控制系统可以控制切割系统。控制系统可以特别地控制要切割的肠的(纵向)位置。基于(在测量期间获得的)质量参数的在前确定,质量参数作为纵向位置的函数是已知的(由控制系统)。控制系统可允许基于肠的纵向位置处的(局部)质量参数切割肠。例如,肠的截面大小和肠中空腔的存在可以被称为纵向位置的函数或根据纵向位置。基于该信息,可以在缺陷的下游和缺陷的上游将肠切割几厘米,诸如0.5-15cm,特别是5-10cm。基于该信息,肠可以进一步在肠直径的相关改变的下游切割几厘米,诸如0.5-15cm,特别是5-10cm。直径的这种相关改变可能与直径的突然增加或减小有关,例如大于2mm。这种相关改变也可能与突然增加或减小的肠上游的直径找平有关。这样,在各实施例中,可以去除限定两个直径之间的过渡的部分。在进一步的实施例中,限定过渡的部分可以保持附接到下游部分或上游部分(在切割之后)。
需要注意的是,在缺陷下游的位置处切割肠涉及这样一个事实,即在包括缺陷的位置可能通过切割系统之前,在通过切割系统的肠的位置处进行切割。
因此,在各实施例中,切割系统被配置用于在肠的预定纵向位置处切割肠,其中,所述预定纵向位置由所述控制系统基于(在另一纵向位置处)所述肠的质量(参数)来确定(其中,所述另一纵向位置在所述肠的预定纵向位置的上游)。特别地,所述切割系统被配置用于在肠的预定纵向位置处切割肠,其中,所述预定纵向位置由所述控制系统基于(在另一纵向位置处)所述肠的截面大小的改变和在另一纵向位置处所述肠中空腔的存在中的一个或多个来确定(其中,所述另一纵向位置在所述肠的预定纵向位置的上游)。附加地或可替代地,基于(在另一纵向位置处)肠的缺陷确定预定纵向位置(其中,所述另一纵向位置在所述肠的预定纵向位置的上游)。特别地,预定纵向位置和另一纵向位置之间的距离在1-15cm,诸如5-10cm的范围内。
在进一步的实施例中,对切割后提供的肠部分进行分类和/或收集。因此,该系统可以进一步被配置用于进行分类和/或收集。在各实施例中,该系统可以被配置用于切割肠一次并提供两个部分。该系统还可以被配置用于将肠切成10个部分或甚至更多部分。部分的数量特别基于直径改变的数量和/或包括缺陷(诸如肠腔)的位置的数量。在各实施例中,如果肠的质量在肠的长度上基本上没有改变,则切割系统可以被配置为不切割肠。在各实施例中,肠的一部分包括整个肠。因此,在各实施例中,切割系统可以被配置用于选择(分类和/或收集)(整个)肠。切割系统可以特别地被配置用于在肠的n个预定纵向位置处切割肠,以提供肠的n+1个部分。特别地,n至少为1。在各实施例中,n等于0并且不提供切割。
因此,在进一步的具体实施例中,该系统进一步包括功能上连接到控制系统的收集系统,其中,所述切割系统被配置用于在所述肠的n个预定纵向位置处切割所述肠以提供n+1个肠部分,并且其中,所述收集系统被配置为基于局部质量参数(值)中的一个或多个分类和收集所述肠的部分,特别是其中所述部分基于(i)肠部分的截面大小和(ii)肠部分中空腔的存在中的至少一个来分类。
在本文中,术语“质量”和“质量参数”与肠相关,指的是肠的(产品)质量,其可以基于质量参数的一个或多个(值)来确定(特别是作为肠的纵向位置的函数)。例如,术语质量可以指特定大小的基本恒定的肠口径。因此,例如,质量参数“口径”的值可以在特定大小±预定裕度的范围内(例如几mm)。此外,质量可以指的是特定缺陷的不存在,诸如空腔的不存在,特别是质量参数“空腔的存在”的值可以是“否”。
切割系统特别配置在测量系统的下游。在各实施例中,切割系统可以被配置为类似于布置在切割系统上游的系统的元件或零件。在各实施例中,切割系统还可以包括另外的产品载体(用于承载至少部分肠)。此外,切割系统可以包括另外的输送系统(用于在另外的产品载体上(周围)移动肠的至少一部分)。切割系统基本上包括切割设备。在各实施例中,切割设备可以包括旋转切割刀或旋转刀。在各实施例中,切割刀可以具有单个旋转刀片或多个刀片。在其他实施例中,切割设备可以包括水射流或例如激光。切割设备可以特别地被配置用于在产品载体和另一产品载体之间的切割位置处切割肠,特别是其中产品载体和另一产品载体以远离配置布置。在进一步的实施例中,切割系统进一步包括移动系统,特别是用于将布置在产品载体处的肠(或肠的剩余部分)的末端(端部)移动到另一产品载体,特别是其中产品载体和另一产品载体布置成对准并处于相邻配置。产品载体的第一端和另一产品载体的第一端可以互补地配置。相应端部可以例如在相邻配置中互锁。相应端部中的一个可以具有突起,而另一端可以具有用于容纳相邻配置中的突起的空腔。端部中的一个可以是球形的,互补端可以是部分中空的以接收相邻配置中的球形端。
在具体实施例中,切割系统包括另一产品载体、另一产品输送系统、移动系统和切割设备;其中(i)所述移动系统被配置为在所述产品载体和所述另一产品载体被布置成对准并且处于相邻配置时,将布置在所述产品载体处的所述肠的末端移动到所述另一产品载体;(ii)所述另一产品输送系统被配置为使所述肠(的至少一部分)在所述另一产品载体上移动(其中,所述肠包围另一产品载体表面);以及(iii)所述切割设备被配置为在所述产品载体和所述另一产品载体被布置成远离配置时,在所述产品载体和所述另一产品载体之间的切割位置处切割所述肠。
切割系统可以进一步特别地包括另外的位置系统,特别地(也)功能性地耦合到控制系统。在进一步的实施例中,控制系统进一步被配置为基于另一位置系统的信号来确定肠在切割位置处的纵向位置。同样,这种切割可以在系统中(当测量肠时)在上游(沿着工艺线)识别的肠的一个或多个纵向位置处进行。
所述另一位置系统还可以包括(另一)测量轮系统,所述测量轮系统包括另一测量轮,特别是其中所述另一测量轮被配置在所述产品载体和所述另一产品载体之间,其中,所述产品载体和所述另一产品载体被布置成远离配置,并且其中,所述另一测量轮系统被配置用于感测与所述另一测量轮接触的肠的纵向位置。所述另一位置系统进一步特别地被配置用于保持肠上的张力。在各实施例中,该系统包括布置在另一测量轮上游的另一张力施加元件。另一张力施加元件可以如关于张力施加元件所描述的那样构造。特别地,另一测量轮与另一张力施加元件结合可拉紧肠。肠可以与位置系统的拉伸一致地拉伸,使得使用位置系统和使用位置系统确定的纵向位置是可比较的。
在相邻配置中,产品载体特别与另一产品载体对准。在进一步的实施例中,产品载体和另一产品载体(也)在远离配置中对准,参见下文。
产品载体可进一步特别地被配置为可从第一产品载体位置移动到第二产品载体位置,其中,在第一产品载体位置中,输送和密封系统将产品载体(的至少部分)封闭,在第二产品载体位置中,产品载体与另一产品载体对准。产品载体可以在(用于)测量阶段的第一产品载体位置和(用于)切割阶段的第二产品载体位置之间移动。此外,所述另一产品载体和所述产品载体也可以相对于彼此移动。在相邻配置中,所述产品载体和所述另一产品载体之间的载体间距离可以非常小,诸如从约零厘米到几厘米,从而允许从肠的末端从所述产品载体转移到所述另一产品载体。在远离配置中,载体间距离可以更大,诸如至少几厘米,特别是至少5厘米,诸如至少10厘米。远离配置中的载体间距离特别小于50厘米,诸如小于30厘米。远离配置中的载体间距离可以特别地被配置用于允许切割设备在另一产品载体和产品载体之间的切割位置处切割肠。远离配置中的载体间距离可以进一步特别地被配置用于将另一测量轮布置在产品载体和另一产品载体之间的位置处。
在具体实施例中,远离配置中的产品载体和另一产品载体之间的载体间距离与相邻配置中的载体间距离之比为至少10,诸如至少50或甚至更大(特别是对于远离配置中载体间距离基本为零,该比率基本上是无限的)。
在本文中,术语另一产品载体可涉及多个另一产品载体。该系统可以特别包括多个另一产品载体,每个产品载体用于承载已经从肠切下的部分(肠)。随后,另一产品载体中的一个可以与产品载体(承载肠)对准,并接收肠的末端。接着,在切割肠之后,肠的直到切割的部分也可以移动到另一产品载体。接下来,可以将另一个另一产品载体与产品载体对准,并且可以重复该过程,直到所有的肠从产品载体移动到一个或多个另一产物载体。
在又一实施例中,该系统包括另一产品载体系统;其中,所述另一产品载体系统包括多个另一产品载体,其中,所述系统被配置为将所述肠的连续末端移动到不同的另一产品载体。所述产品载体系统可至少包括两个另一产品载体,诸如至少三个或至少四个另一产品载体。
此外,在进一步的实施例中,该系统(还)包括多个产品载体和至少两个切割系统。(多个)产品载体可以进一步特别地布置在输送系统中,(输送系统)被特别配置用于将一个或多个产品载体从第一位置输送到第二位置,在所述第一位置中,所述输送和密封系统封闭产品载体(的至少部分),其中,所述产品载体与所述(一个或多个)切割系统的另一产品载体对准。
在另一方面,本发明提供了用于校准(天然)肠/确定其大小的方法。该方法特别至少包括测量阶段。在测量阶段,产品载体可以布置在第一载体位置处。在各实施例中,该方法,特别是测量阶段,包括在测量部分处测量(和/或感测)肠的(可测量)参数(和/或特征),特别是一个或多个(可测量)参数(和/或特征)。在具体实施例中,也参见上文,该方法包括由(辐射传感器系统的)辐射源向测量部分发射辐射,并在测量部分的下游位置(相对于辐射源)处用(辐射传感器系统的)辐射检测器感测辐射的至少一部分。此外,该方法可以包括基于辐射传感器系统的信号确定测量部分处的肠的截面大小(例如口径或直径)。该方法特别包括在测量部分处确定肠的一个或多个质量参数(值),特别是根据肠的纵向位置确定一个或多个质量参数(值)。在各实施例中,该方法可以在本发明的系统中执行。特别地,本发明的系统(的元件)可以用于本发明的方法中。
在进一步的具体实施例中,该方法(进一步)(还)包括基于辐射传感器系统的信号确定在测量部分处一个或多个缺陷(本文所述),诸如一个或多个空腔的存在(或不存在)。在进一步的实施例中,基于其他传感器系统进一步(也)确定一个或多个质量参数。
该方法特别包括将流体提供给流体连接到穿孔的流体通道,以在肠中提供流体。在各实施例中,该方法进一步包括感测流体通道中的流体的流体压力和流体流量,并且特别地基于(流体通道中的)流体压力、(流体通道中的)流体流量和辐射传感器系统的信号确定肠的截面大小以及可选地测量部分处一个或多个空腔的存在。在各实施例中,基于流体通道中的流体压力和流体流量来确定测量部分处的流体压力。测量部分处的流体压力特别由控制系统确定。此外,控制系统可以控制流体通道中的流体流量。在各实施例中,可以基于流体通道中的流体压力来控制通过通道的流体流量。
在又一些实施例中,该方法进一步包括确定肠在测量部分处的纵向位置,并且特别地根据肠的纵向位置确定一个或多个质量参数,特别是截面大小和可选的缺陷,诸如一个或多个空腔的存在。
此外,该方法可以包括切割和/或分类肠。切割(和/或分类)可在切割阶段进行。切割阶段可以配置在测量阶段之后。在各实施例中,切割阶段包括分类(和/或选择)而不切割肠。
在具体实施例中,该方法进一步包括(切割阶段包括)在肠的预定纵向位置处切割肠,特别是基于根据肠的纵向位置的截面大小和可选地一个或多个空腔的存在。切割肠可以由控制系统控制。特别地,预定的纵向位置由控制系统确定。
在各实施例中,肠的预定纵向位置包括纵向位置,其中,(i)肠的截面大小改变和(ii)缺陷的存在,特别是一个或多个空腔的存在中的一个或多个在肠的预定纵向位置的上游的另一纵向位置处表现,特别是其中所述预定纵向位置和所述另一纵向位置之间的距离在1-15cm,诸如5-10cm的范围内。
术语“预定纵向位置”和“另一纵向位置”可以特别地分别指多个预定纵向位置和多个另一纵向位置。
在具体实施例中,该方法包括(i)在肠的n个预定纵向位置处切割肠以提供n+1个肠部分(基于根据肠的纵向位置的截面大小和可选地一个或多个空腔的存在),以及(ii)基于以下中的至少一个对肠部分进行分类:(iia)肠部分的截面大小和(iib)肠部分中空腔的存在。特别是在n个预定位置,(ia)肠的截面大小改变和(ib)一个或多个缺陷的存在,特别是一个或多个空腔的存在中的一个或多个在肠的相应预定纵向位置的上游的另一纵向位置处表现。在各实施例中,n等于0,特别是可以通过首先切割肠来进行分类。
“截面大小改变”等短语中的“改变”一词特别与相关改变相关。这种相关改变可以是例如至少2mm或至少3mm的改变。在各实施例中,如果大小沿至少5cm的纵向距离改变超过4mm,或者例如在至少10cm的长度上改变2mm,则该改变可能是相关的。在各实施例中,可以进一步设置改变是否相关,或者例如由控制系统确定,特别是在分析了整个肠之后。
测量阶段可以在系统的第一位置处执行。切割阶段特别是在系统的另一位置处执行。因此,特别是产品载体是移动的。在该方法中,最初可以分析肠(在测量阶段),其中整个肠围绕产品载体移动。随后,承载肠的产品载体可以移动到切割位置,以执行切割阶段。
因此,在各实施例中,该方法进一步包括将包括单个肠的产品载体从(系统的)第一载体位置移动到(系统的的)第二载体位置,其中(第二载体位置处的)产品载体与另一产品载体对准。在具体实施例中,所述方法可进一步包括(切割阶段包括)(i)将肠的末端从产品载体移动到以相邻配置配置的另一产品载体(其中,产品载体与另一产品载体对准);(ii)将包括肠的末端的所述另一产品载体和包括肠的其余部分的所述产品载体布置在远离配置中;(iii)在所述远离配置中在所述另一产品载体上移动所述肠,同时确定所述肠在所述产品载体和所述另一产品载体之间的切割位置处的纵向位置,以及(iv)基于所述控制系统的(切割)信号在所述切割位置处切割所述肠,从而提供至少部分地布置在另一产品载体处的肠的至少(校准的)一部分(以及可选地至少部分地布置在所述产品载体处的肠的剩余部分)。控制系统的(切割)信号特别基于根据肠的纵向位置的(确定的)截面大小和可选地一个或多个空腔的存在。例如,当切割位置上游1-15cm(诸如5-10cm)处存在一个或多个空腔时,或者当切割位置上游截面大小改变1-15cm(诸如5-10cm)时,可以提供信号。
在进一步的实施例中,该方法进一步包括重复执行以下阶段:(i)将包括肠的(校准)部分(或在各实施例中为整个(校准)肠)的另一产品载体移离产品载体,以及(ii)将另一个另一产品载体与产品载体连续对准,和(iii)连续重复切割阶段,直到所有肠从产品载体上移动。在进一步的实施例中,该方法进一步包括从一个或多个另一产品载体中去除(校准的)部分肠(或整个肠),并基于(校准的)(部分)肠的相应截面大小对(校准的部分)肠进行分类。
本文中的术语“控制”和类似术语特别指的是至少确定元件的行为或监督元件的运行,特别是其中元件被配置为调节损伤皮肤组织的治疗。因此,本文中“控制”和类似术语可以例如指将行为施加到(可控)元件(确定行为或监督元件的运行)等,诸如例如测量、显示、致动、打开、移动、改变温度等,特别是致动。除此之外,术语“控制”和类似术语可另外包括监控。因此,术语“控制”和类似术语可以包括将行为施加到元件上,也可以将行为施加在元件上并监控元件。元件的控制可以通过控制系统来完成。因此,控制系统和(可控)元件可以至少暂时地或永久地在功能上耦合。该元件可以包括控制系统的至少一部分。在各实施例中,控制系统和元件可以不物理耦合。可以经由有线和/或无线控制进行控制。术语“控制系统”还可以指多个不同的控制系统,这些控制系统特别是功能耦合的,其中例如一个控制系统可以是主控制系统,而一个或多个其他控制系统可以为从属控制系统。
附图说明
现在将仅通过示例的方式参考示意性附图描述本发明的各实施例,其中对应的附图标记指示对应的零件,并且其中:图1示意性地描绘了本发明的系统的实施例;图2-3示意性地描绘了本发明的一些其他方面;图4A-4B示意性地描绘了测量系统的实施例的一些方面;以及图5-6示意性地描绘了与肠的切割和分类相关的一些方面。示意图不一定按比例绘制。
具体实施方式
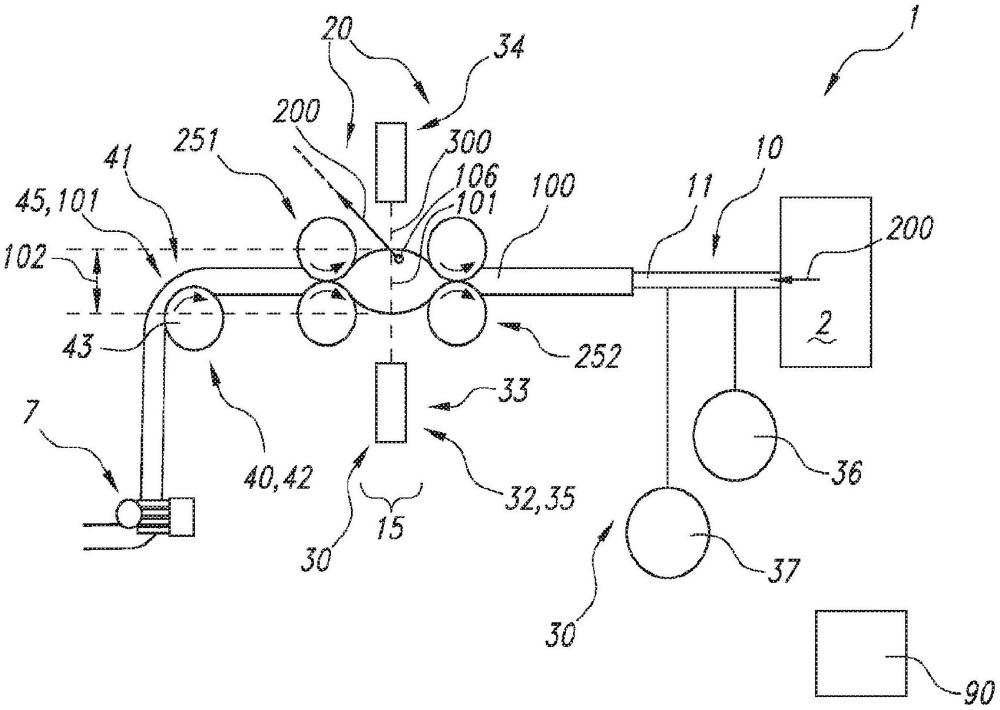
图1示意性地描绘了本发明的系统1的实施例。该实施例可用于该方法的测量阶段。系统1被配置用于确定天然肠100的大小。所示实施例包括产品载体10、产品输送和密封系统20、测量系统30、位置系统40和控制系统90。产品载体10(也参见图2,图2描绘了没有肠100的产品载体10)包括在产品载体表面11中具有一个或多个穿孔12的测量部分15。产品载体10包括流体通道19,并且一个或多个穿孔12将流体通道19流体连接到产品载体的表面11。所示的流体通道19连接到流体供应装置2。在所示实施例中,流体供应装置包括水供应装置。在进一步的实施例中,流体可以包括气态流体,诸如空气。
产品输送和密封系统20可以在产品载体10上移动肠100,并且至少沿着测量部分15的至少一部分暂时密封肠100。在所示的实施例中,产品输送和密封系统20包括第一组251和第二组252的轮25,轮25可以如箭头所示旋转,因此在给定的实施例中将肠从左侧输送到右侧。这样,肠100从上游位置移动到下游位置。需要注意的是,在图中,第一组251的轮25位于测量部分15的上游端,第二组轮252位于测量部分15的下游端(参见轮25的旋转方向)。
测量系统30包括辐射传感器系统32,该系统用于测量一个或多个质量参数,诸如测量部分15处的肠100的截面尺寸102。辐射传感器系统32包括彼此辐射耦合的辐射源33和辐射检测器34(的集合)。辐射检测器34布置在测量部分15的下游(相对于辐射300),辐射源33布置在测量部分15的上游。需要注意的是,术语“下游”和“上游”特别指各元件之间的功能关系。关于辐射检测器34和源33,功能关系基于由源33辐射并由检测器34检测的辐射。需要进一步注意的是,辐射源33和检测器34在结构上不一定必须布置在测量部分15的两(相对)侧。例如,当使用(辐射)反射元件时,检测器34和源33可以布置在测量部分15的同一侧。肠100的尺寸102可以由通过测量部分15的辐射(部分)和至少部分被肠100阻挡的辐射来确定。因此,在各实施例中,该辐射传感器系统32也可以被称为阴影传感器系统35。
测量系统30功能性地耦合到控制系统90。为了清楚起见,图中未描绘控制系统90和测量系统30(以及系统1的其他元件)之间的功能连接。控制系统90可以进一步处理测量系统30的信号,并且可以基于辐射传感器系统32的信号确定测量部分15处的肠100的截面大小。
基于位置系统40,特别是位置传感器41,可以在位置感测位置45处确定肠100的纵向位置101和/或速度。基于此,控制系统90可以确定肠在测量部分15处的纵向位置101。
辐射传感器系统32还可以被配置用于在测量部分15处感测从肠100离开的流体200(特别是液体)。辐射传感器32还可以被配置为用于感测肠100的外表面处的脂肪组织和/或膜的残余物的存在和/或用于在测量部分15处感测肠100内的粘膜。因此,基于辐射传感器系统32的信号,控制系统90可以确定一个或多个质量参数,特别是测量部分15处的肠100的截面大小和测量部分15处肠100中的一个或多个空腔106的存在中的一个或多个。进一步基于一个或多个可选的其他传感器系统(例如包括视觉系统(未示出))的信号,控制系统90可以在各实施例中进一步确定其他缺陷,诸如肠100处的图案的存在(例如,指示胃的剩余部分)。其他传感器系统的信号可以进一步由辐射传感器系统32的信号组合,以(由控制系统90)确定一个或多个质量参数。测量系统30可以包括其他传感器系统,诸如视觉系统。
肠100的截面大小是肠100的标准大小或直径。然而,截面尺寸102可以取决于不同的因素,例如测量系统30的类型,但也取决于测量部分15处的肠100中的压力。为了校正压力的改变,给定实施例中的测量系统30进一步包括用于感测流体通道19中的流体200的流体压力206的压力传感器36和用于感测流体通道19中流体200的流体流量209的流量传感器37(也参见图2)。此外,增加的流体流量209可以指示肠100中空腔106(孔洞或裂口等)的存在。因此,控制系统90可以特别地基于辐射传感器系统32的信号、压力传感器36的信号和流量传感器37的信号(以及可选的一个或多个其他传感器系统的信号)的组合来确定肠100的截面大小和/或肠100中一个或多个空腔106的存在。
图1进一步示出了一个实施例,其中位置系统40包括测量轮系统42,测量轮系统42包括测量轮43。为了测量,肠100在测量轮43上方移动以旋转测量轮43。这样,测量轮系统42可以感测与测量轮43接触的肠100的纵向位置101或速度。为了防止肠100在测量轮处的任何滑动,系统1进一步包括张力施加元件7,张力施加元件7被配置为保持测量轮43处肠100的张力。张力可由摩擦元件提供,诸如图中所示的刷子。此外,在安装张力施加元件7之后,肠的纵向位置101的确定大大改善。已发现,最小但明显的张力,例如10或15N,可提供肠100的明显且可再现的拉伸。
此外,图1-3还解释了包括第一组251和第二组252的轮25的产品输送和密封系统20的实施例。在该实施例中,每个轮25包括具有周向槽27的表面26,参见图3。槽27具有与产品载体10的表面11的(圆形)形状12互补的(圆形的)形状28。由于产品载体10和槽27的分别的互补形状12、28,轮25可以在产品载体10的表面处密封肠100。需要注意的是,密封不是气密密封,仍然有一些流体可以通过。
为了能够输送肠100,驱动两组251、252的四个轮25中的至少一个轮25,而特别是所有轮25都是可旋转的。此外,当启动过程时,通道中可能存在静止的空气,并且在流体200(特别是液体,甚至更特别是水)填充肠100之前,空气可以在测量部分15处填充肠100。为了便于空气的释放,在图2所示的实施例中,这些第二组252的轮25的上轮可以相对于第二组252的另一个轮25平移,如双箭头所示。这样,第二组252的轮25将暂时不密封产品载体10处的肠100,并且空气可能离开。在其他实施例中,至少两个或例如所有的轮25可以平移到产品载体10或从产品载体10移开。
图4A-4B示意性地描绘了辐射传感器系统32的一些方面。图4A描绘了一个实施例,其中辐射源33被配置用于以二维光束330发射辐射300。辐射源33可以例如包括一些透镜等,以将辐射300引导为帘或多条平行线。需要注意的是,图中的线纯粹是为了说明,并且这些线可以全部连接以形成二维光束(或帘)330。辐射是由辐射检测器34检测的肠100的下游,辐射检测器34包括辐射检测元件341的一维阵列(在图中其大小被放大)。
图4B中的辐射传感器系统32包括两组辐射源33和辐射检测器34。这里,测量系统30被配置用于在测量部分15处以约90°的相互角α提供两组辐射源33的二维光束330。这样,例如,在肠100的同一纵向位置101处,第一组可以测量第一截面尺寸102、102',第二组可以(在与第一组垂直的方向上)测量第二截面尺寸102、102",这两者都可以用于确定肠100的截面大小。
在图5中,描绘了系统1的一个方面,更详细地示出了切割系统60。虽然图中未示出,但是切割系统60也功能性地连接到控制系统90。切割系统60被配置用于在肠100的一个或多个预定纵向位置101处切割肠100。待切割的预定位置由控制系统90基于根据肠100的纵向位置101的所确定的截面大小的评估以及可选地一个或多个缺陷(诸如一个或多个空腔106)的存在来确定。
可以基于控制系统90的信号在肠100的预定纵向位置101处切割肠100。例如,可以基于在肠100的预定纵向位置101上游的另一纵向位置101处肠100的截面大小的改变和肠100中的空腔106的存在中的一个或多个,在预定纵向位置101处切割肠100。
该实施例描绘了切割系统60,其包括另一产品载体610、另一产品输送系统620、另一位置系统640、移动系统650和切割设备660。示意图进一步描绘了远离配置中的产品载体10和另一产品载体610。产品载体10和另一产品载体610对准,但被配置为彼此相距一定距离,如肠100中的变窄所示。这样,切割设备660可以在产品载体10和另一产品载体610之间的位置处切割肠。
在所描绘的图中,肠由产品载体10以及另一产品载体610承载。在此情况之前,布置在产品载体10处的肠100的末端已经通过移动系统650移动到另一产品载体610。在移动过程中,产品载体10和另一产品载体610(也)被布置成对准,但处于相邻配置。此外,另一产品输送系统620被配置用于在另一产品载体610上移动肠100。在将肠100在另一产品载体610上移动期间,控制系统90可以基于另一位置系统640的信号来确定肠100在切割位置616处的纵向位置101。当确定的纵向位置(待切割)被布置在切割位置处时,切割设备660可以在切割位置616处(在产品载体10和另一产品载体610之间)切割肠100。
图5中的另一位置系统640包括另一测量轮系统642,该测量轮系统包括另一测量轮643,其与测量阶段中使用的测量轮系统42的测量轮43相当。另一测量轮643被布置成在产品载体10和另一产品载体610之间的位置处接触肠100,特别是为了拉紧肠100,特别是与另一张力施加元件671结合,就像在测量阶段由张力施加元件7完成的那样。另一测量轮系统642可以感测肠100的纵向位置101,该纵向位置101接触另一测量轮643,同时保持肠100上的张力。
图6非常示意性地描绘了系统1的进一步实施例,该系统还包括收集系统80(功能性地连接到控制系统90)。为了清楚起见,以及为了解释一些进一步的方面,省略了大部分其他元件。收集系统80可以有利地用于系统(和方法)中,其中切割系统60被构造用于在肠100的n个预定纵向位置处切割肠100,或其中切割系统完全不用于切割肠(即n=0)。因此,n可以为零。这样,提供了肠100的n+1个部分109(如果不需要切割,则包括整个肠100)。这些部分109或整个肠100(当未被切割时)可基于肠100(的部分109)的截面大小和/或基于肠100的部分109中缺陷的存在(诸如空腔106或上述其他缺陷)而被连续分类。因此,收集系统80可以特别地被构造为基于以下中的至少一个来分类和收集肠100的部分109:(i)肠100的部分109的截面大小和(ii)肠100部分109中的缺陷,特别是空腔106的存在。该实施例包括另一产品载体系统1610,该系统包括另外的三个产品载体610。这样,在已经切割了肠的第一部分109并且已经在另一产品载体610处移动了它之后,肠100的下一个末端(实际上是从被切割的预定位置上游的部分)可以移动到另一产品载体610。然后可以在收集系统(由控制系统90控制)中对部分109进行分类和收集。可选地,在收集系统80的下游,可以配置其他加工系统,例如腌制系统和/或标记系统。
图6进一步示意性地描绘了载体间距离615,即产品载体10和另一产品载体610之间的距离。在相邻配置中,载体间距离615可以为零,直到几厘米。在远离配置中,该距离通常更大以能够在该位置切割肠100。该图进一步指示产品载体10的第一端18和另一产品载体610的第一端618。在各实施例中,这些相应的端部18、618可以构造成形状互补,使得在相邻配置中,相应的端部18、618可以彼此接合,从而进一步促进肠从产品载体10移动到另一产品载体610。
术语“多数”是指两个或更多个。此外,术语“多个”和“一些”可以互换使用。
本领域技术人员将理解本文中的术语“实质上”或“基本上”以及类似术语。术语“实质上”或“基本上”还可以包括具有“完全”、“所有”和“全部”等的实施例。因此,在各实施例中,也可以去除形容词实质上或基本上。在适用的情况下,术语“实质上”或术语“基本上”也可涉及90%或更高,诸如95%或更高、特别是99%或更高或甚至更特别是99.5%或更高(包括100%)。对于数值,应理解术语“实质上”、“基本上”、“约”和“近似”也可能涉及其所指数值的90%-110%,诸如95%-105%,特别是99%-101%的范围。
术语“包括”还包括其中术语“包括”意味着“由……组成”的实施例。
术语“和/或”特别涉及在“和/或”之前和之后提到的一个或多个项目。例如,短语“项目1和/或项目2”和类似短语可能与项目1和项目2中的一个或多个相关。术语“包括”在一个实施例中可以指“由……组成”,但在另一个实施例中也可以指“至少包含所定义的物种和可选的一个或多个其他物种”。
此外,说明书和权利要求书中的术语第一、第二、第三等用于区分相似的元件,而不必用于描述顺序或时间顺序。应当理解,如此使用的术语在适当的情况下是可互换的,并且本文所述的本发明的实施例能够以不同于本文所述或所示的其他顺序来操作。
本文中可以在操作期间描述设备、装置或系统等。如本领域技术人员将清楚的,本发明不限于操作方法或操作中的设备、装置或系统。
应当注意,上述实施例说明而不是限制本发明,并且本领域技术人员将能够在不脱离所附权利要求的范围的情况下设计许多替代实施例。
在权利要求书中,置于括号之间的任何附图标记都不应解释为对权利要求的限制。
动词“以包括”及其连词的使用不排除权利要求中所述元件或步骤以外的元件或步骤的存在。除非上下文明确要求,否则在整个说明书和权利要求中,词语“包括”、“包含”等应以包含性的意义解释,而不是排他性或穷举性的意义;也就是说,在“包括但不限于”的意义上。
在元件之前的冠词“一”并不排除存在多个这样的元件。
本发明可以通过包括若干不同元件的硬件以及通过适当编程的计算机来实现。在列举若干装置的设备权利要求、装置权利要求或系统权利要求中,这些装置中的若干装置可由同一硬件项目实现。在互不相同的从属权利要求中列举某些措施的事实并不意味着不能有利地使用这些措施的组合。
本发明还提供一种控制系统,该控制系统可以控制设备、装置或系统,或者可以执行本文描述的方法或过程。此外,本发明还提供了一种计算机程序产品,当在功能上耦合到设备、装置或系统或由其组成的计算机上运行时,该计算机程序产品控制这样的设备、装置或者系统的一个或多个可控制元件。
本发明进一步适用于包括说明书中描述和/或附图中所示的一个或多个特征性特征的设备、装置或系统。本发明进一步涉及一种方法或过程,其包括说明书中描述和/或附图中所示的一个或多个特征性特征。
本专利中讨论的各个方面可以组合以提供额外的优点。此外,本领域技术人员将理解,可以组合各实施例,并且也可以组合两个以上的实施例。此外,一些特征可以构成一个或多个分案申请的基础。