一种CCD全自动转盘丝印机
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及丝网印刷技术领域,具体涉及一种CCD全自动转盘丝印机。
背景技术
现有的丝网印刷技术大多采用半自动丝网印刷机,而半自动丝网印刷机对于圆形或者椭圆形等形状的材料,需要订做很多相对应的治具,并且其印刷精度不高,且因为需要人工介入进行定位,进一步影响其印刷精度,工作效率低下,产品质量不稳定。
发明内容
本发明的目的在于克服现有技术的不足,提供一种CCD全自动转盘丝印机。
本发明的技术方案如下:
一种CCD全自动转盘丝印机,包括一机架,所述机架上设有一多工位转盘、一高精度对位结构、一除尘结构以及一丝印结构,所述多工位转盘上设有包括上料工位、对位除尘工位、丝印工位以及下料工位四个工位,所述高精度对位结构以及除尘结构设于对应的对位除尘工位一侧,且所述高精度对位结构包括一定位摄像头以及一对位结构,所述定位摄像头以及对位结构分别设于所述多工位转盘上下两侧,且位置相对应,所述丝印结构设于对应的丝印工位一侧。
在本发明中,所述CCD全自动转盘丝印机还包括一上下料机械手以及上下料轨道,所述上下料机械手设于所述上料工位以及下料工位中部位置,所述上下料轨道设于所述机架靠近所述上下料机械手一侧。
在本发明中,所述多工位转盘底部设有一第一驱动装置,所述第一驱动装置驱动所述多工位转盘旋转,且所述第一驱动装置设于一安装固定板上,所述安装固定板与所述机架连接。
在本发明中,对位结构包括一顶杆以及一对位平台,所述顶杆通过一第二驱动装置与所述对位平台连接,所述对位平台下方还设有一顶升气缸,所述顶升气缸通过一丝杆与所述对位平台连接,并驱动所述对位平台运动。
在本发明中,所述定位摄像头下方设有依次设有同轴光源以及球形光源。
在本发明中,所述除尘结构包括一粘尘板,所述粘尘板上设有一粘尘硅胶棍,所述粘尘硅胶棍设于一辊筒安装板上,所述辊筒安装板通过一导轨滑块安装于一滑动轨道上,并通过一设于所述导轨滑块上的第三驱动装置驱动,且所述滑动导轨设于一第四驱动装置上,并由所述第四驱动装置纵向驱动。
在本发明中,所述丝印结构包括一网臂调节装置以及一丝印印刷头,所述网臂调节装置由两组平行设置的网臂调节件构成,所述网臂调节件包括一固定梁臂,所述固定梁臂底部设有一横向安装臂,所述横向安装臂内侧设有固定夹板,所述固定夹板上穿设有数个旋钮,且中部设有一驱动气缸,所述横向安装臂末端设有一刻度旋钮,顶部还设有一旋转轴芯。
进一步的,所述丝印印刷头通过一设于所述机架上的第五驱动装置驱动。
更进一步的,所述多工位转盘、高精度对位结构、除尘结构、丝印结构、上下料机械手以及上下料轨道均与一中央控制系统电性连接,并由所述中央控制系统控制。
相较于现有技术,本发明的有益效果在于:
本发明通过多工位转盘、高精度对位结构、除尘结构以及丝印结构的自动化动作,以中央控制系统统一控制,在传统半自动丝印机基础上加以对位结构以及定位摄像头,能够有效的对产品进行对位以及位置信息的获取,无需人工对位上料,大幅提高生产效率,同时避免人工对位上料精度低的问题,保证产品质量。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
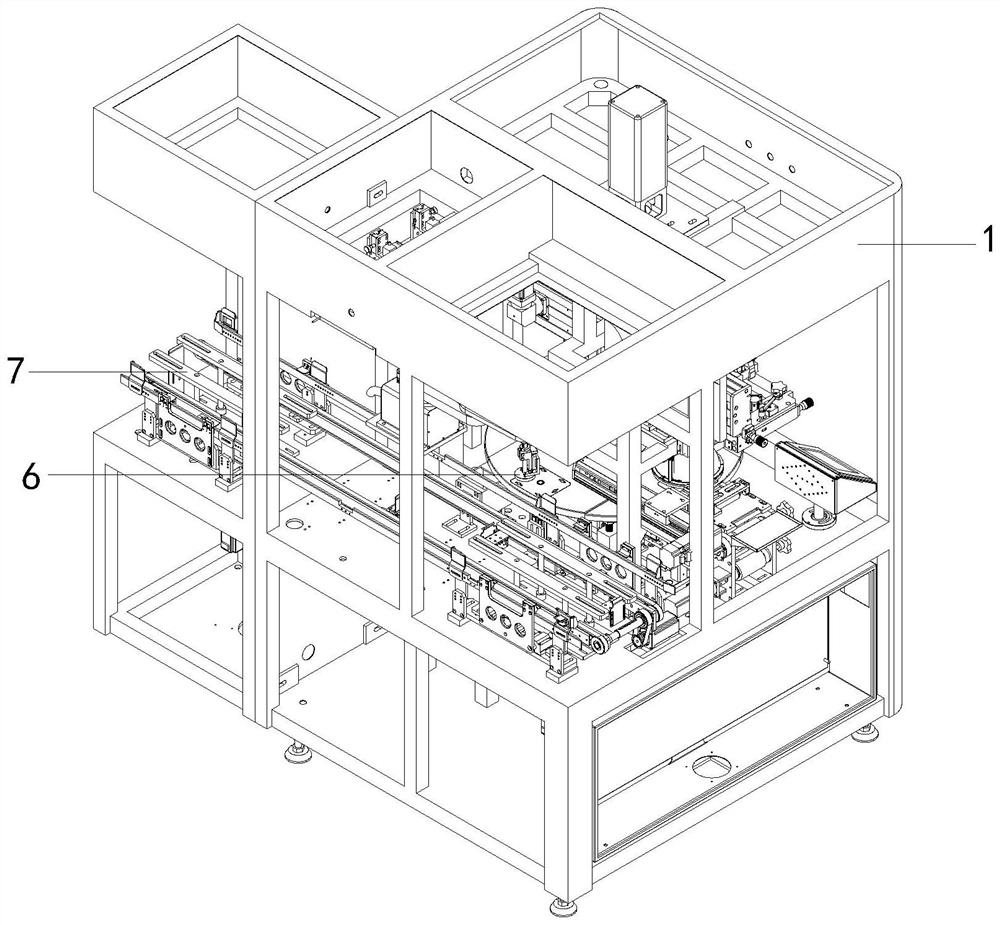
图1为本发明提供的一种CCD全自动转盘丝印机的整体结构图;
图2为所述CCD全自动转盘丝印机的另一角度结构图;
图3为所述多工位转盘的结构图;
图4为所述高精度对位结构的结构图;
图5为所述对位结构的结构图;
图6为所述除尘结构的结构图;
图7为所述网臂调节装置的结构图。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
实施例
请参阅图1至图7,本实施例提供的一种CCD全自动转盘丝印机,包括:一机架1,机架1上设有一多工位转盘2、一高精度对位结构3、一除尘结构4以及一丝印结构5,多工位转盘2上设有包括上料工位21、对位除尘工位22、丝印工位23以及下料工位24四个工位,高精度对位结构3以及除尘结构4设于对应的对位除尘工位22一侧,且高精度对位结构3包括一定位摄像头31以及一对位结构32,定位摄像头31以及对位结构32分别设于多工位转盘2上下两侧,且位置相对应,丝印结构4设于对应的丝印工位23一侧。
在本实施例中,CCD全自动转盘丝印机还包括一上下料机械手6以及上下料轨道7,上下料机械手6设于上料工位21以及下料工位24中部位置,上下料轨7道设于机架2靠近上下料机械手6一侧。
在本实施例中,多工位转盘2底部设有一第一驱动装置25,第一驱动装置25驱动多工位转盘2旋转,且第一驱动装置25设于一安装固定板26上,安装固定板26与机架1连接。
在本实施例中,对位结构32包括一顶杆321以及一对位平台323,顶杆321通过一第二驱动装置322与对位平台323连接,对位平台323下方还设有一顶升气缸324,顶升气缸324通过一丝杆325与对位平台323连接,并驱动对位平台323运动。
在本实施例中,定位摄像头31下方设有依次设有同轴光源311以及球形光源312。
在本实施例中,除尘结构4包括一粘尘板41,粘尘板41上设有一粘尘硅胶棍42,粘尘硅胶棍42设于一辊筒安装板43上,辊筒安装板43通过一导轨滑块44安装于一滑动轨道45上,并通过一设于导轨滑块44上的第三驱动装置46驱动,且滑动导轨45设于一第四驱动装置47上,并由第四驱动装置47纵向驱动。
在本实施例中,丝印结构包括一网臂调节装置51以及一丝印印刷头52,网臂调节装置51由两组平行设置的网臂调节件构成,网臂调节件包括一固定梁臂511,固定梁臂511底部设有一横向安装臂512,横向安装臂512内侧设有固定夹板513,固定夹板513上穿设有数个旋钮514,且中部设有一驱动气缸515,横向安装臂512末端设有一刻度旋钮516,顶部还设有一旋转轴芯517。
进一步的,丝印印刷头52通过一设于机架1上的第五驱动装置521驱动。
更进一步的,多工位转盘2、高精度对位结构3、除尘结构4、丝印结构5、上下料机械手6以及上下料轨道7均与一中央控制系统电性连接,并由中央控制系统控制。
工作原理:
将带有物料的料盘放置于上下料轨道7的上料端,上下料轨道7驱动料盘向上下料机械手6方向运动,至预设位置后,由上下料机械手6将置于料盘上的物料夹取并移动至多工位转盘2上的上料工位21,随后通过第一驱动装置25驱动多工位转盘2旋转,使物料旋转至对位除尘工位22上,除尘结构4通过第四驱动装置47驱动向下运动,使粘尘硅胶棍42与粘尘板41接触,由第三驱动装置44驱动导轨滑块44于滑动导轨45上运动,完成对物料除尘,除尘后再由第四驱动装置47将粘尘硅胶棍42抬升离开粘尘板41,在通过对位结构32的顶杆321配合顶升气缸324将物料对位并顶起,由定位摄像头31拍照,将定位信息传送至中央控制系统,定位完成后,再由第一驱动装置25驱动多工位转盘2旋转,使物料旋转至丝印工位23上,通过网臂调节装置51的固定夹板513固定物料,第五驱动装置521驱动丝印印刷头52对物料进行丝印,丝印完成后再由第一驱动装置25重复上述步骤,将物料旋转至下料工位24,由上下料机械手6将物料取出,且多工位转盘2每旋转一次,上下料机械手6均重复一次上下料动作,如此往复,实现自动化上下料、对位除尘以及丝印的工序动作。
虽然已参照几个典型实施方式描述了本发明,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本发明能够以多种形式具体实施而不脱离发明的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随附权利要求所涵盖。
- 一种CCD全自动转盘丝印机
- 一种四工位转盘全自动丝印机用刮墨装置