基于光学影像的地质结构面提取方法、装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及地质测量领域,尤其涉及一种基于光学影像的地质结构面提取方法、装置。
背景技术
能源、交通、水利水电等工程向着大型、超大型发展,这些工程大多处于岩体环境之中,其中岩体中结构面对岩体变形和稳定性分析起到重要作用,地质工程对岩体结构信息快速提取与准确表达的要求十分迫切。
但是,岩体结构成因复杂,出露具有随机性,造成其自然特征形态复杂多样,勘察识别困难。在地质及岩土工程领域,结构面的准确判别和提取一直是个难题。
发明内容
发明目的:本发明旨在提供一种基于光学影像的地质结构面提取方法、装置,应用了空间三维产状信息,特别对于仅利用纹理信息难以准确识别的面状出露结构面具有良好的提取效果,有效降低结构面提取的难度,提高结构面提取的准确性。
技术方案:本发明提供一种基于光学影像的地质结构面提取方法,包括:
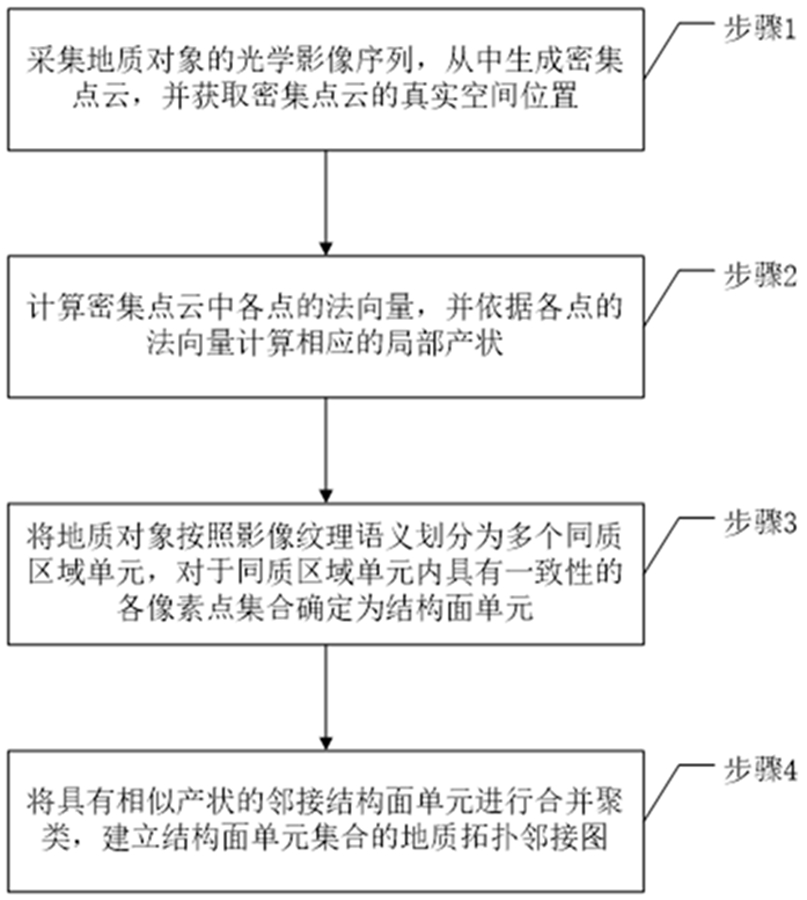
采集地质对象的光学影像序列,从中生成密集点云,并获取密集点云的真实空间位置;
计算密集点云中各点的法向量,并依据各点的法向量计算相应的局部产状;
将地质对象按照影像纹理语义划分为多个同质区域单元,对于同质区域单元内具有一致性的各像素点集合确定为结构面单元;
将具有相似产状的邻接结构面单元进行合并聚类,建立结构面单元集合的地质拓扑邻接图。
具体的,基于运动恢复结构生成光学影像序列对应的稀疏点云,通过多视图聚簇和基于面片模型的密集匹配重建密集点云。
具体的,通过在地质对象上布设的控制点,采用全站仪测量控制点的物方空间坐标,并根据控制点与密集点云中对应点的关系获取绝对控制信息,确定密集点云的真实空间位置。
具体的,采用最小二乘法根据待测点与局部邻域内预设数量的最近邻点,进行拟合得到拟合平面,将拟合平面的法向量作为待测点的法向量;
取拟合平面与水平面之间的夹角作为倾角,取拟合平面法向量在水平面投影的方向作为倾向,倾角取值范围为0°~90°,倾向取值范围为0°~360°,将倾角和倾向作为待测点的局部产状。
具体的,按照以下超像素分割距离度量模型D
D
其中,L、a和b分别表示颜色模型中的三个要素,S表示同质区域单元网格间隔,m表示同质区域单元致密性控制变量,d
若D
具体的,对于同质区域单元内各像素点的局部产状进行统计,若倾角之间的偏差不超过预设倾角偏差以及倾向之间的偏差不超过预设倾向偏差的像素点占比,超过预设比例,则确定为结构面单元。
具体的,采用裂隙等密度图对结构面单元进行统计,确定裂隙发育程度满足预设裂隙标准的结构面单元集合;通过同质区域单元作为点,边连接相邻同质区域单元,建立结构面单元集合的拓扑邻接图。
具体的,将结构面单元内像素点的倾角方差和倾向方差,均低于对应的预设方差阈值的局部产状的均值作为结构面单元的产状,若结构面单元的产状之间的偏差不超过预设产状阈值,则认定为具有相似产状;基于结构面单元集合和相似产状进行结构面的合并聚类。
本发明还提供一种基于光学影像的地质结构面提取装置,包括:采集单元、产状计算单元、结构面确定单元和合并单元,其中:
所述采集单元,用于采集地质对象的光学影像序列,从中生成密集点云,并获取密集点云的真实空间位置;
所述产状计算单元,用于计算密集点云中各点的法向量,并依据各点的法向量计算相应的局部产状;
所述结构面确定单元,用于将地质对象按照影像纹理语义划分为多个同质区域单元,对于同质区域单元内具有一致性的各像素点集合确定为结构面单元;
所述合并单元,用于将具有相似产状的邻接结构面单元进行合并聚类,建立结构面单元集合的地质拓扑邻接图。
具体的,所述结构面确定单元,用于按照以下超像素分割距离度量模型D
D
其中,L、a和b分别表示颜色模型中的三个要素,S表示同质区域单元网格间隔,m表示同质区域单元致密性控制变量,d
若D
有益效果:与现有技术相比,本发明具有如下显著优点:通过影像纹理语义进行同质区域单元划分,并结合产状进行结构面单元的合并聚类,有效实现结构面与非结构面的判别,进行结构面的提取。
附图说明
图1为本发明提供的基于光学影像的地质结构面提取方法的流程示意图;
图2为本发明提供的同质区域单元示意图;
图3为本发明提供的拓扑邻接图;
图4为本发明提供的裂隙等密度图;
图5为本发明提供的待合并的结构面单元示意图;
图6为本发明提供的赖特网示意图;
图7为本发明提供的使用密度计统计极点数示意图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
参阅图1,其为本发明提供的基于光学影像的地质结构面提取方法的流程示意图,包括具体步骤。
步骤1,采集地质对象的光学影像序列,从中生成密集点云,并获取密集点云的真实空间位置。
本发明实施例中,基于运动恢复结构生成光学影像序列对应的稀疏点云,通过多视图聚簇和基于面片模型的密集匹配重建密集点云。
本发明实施例中,通过在地质对象上布设的控制点,采用全站仪测量控制点的物方空间坐标,并根据控制点与密集点云中对应点的关系获取绝对控制信息,确定密集点云的真实空间位置。
在具体实施中,采集地质岩体对象(如:岩质边坡、隧洞及基坑等)的普通光学数码影像序列,基于运动恢复结构(Structure from Motion,SfM)生成影像序列对应的稀疏点云,进而通过多视图聚簇 (CMVS,Cluster Multi-View Stereo)和基于面片模型的密集匹配 (PMVS,Patch-Based Multi-View Stereo)重建密集点云。
在具体实施中,在地质岩体对象表面可以均匀的布设若干(不少于3个)控制点标靶,采用全站仪测量控制点的物方空间坐标,根据布设的控制点与密集点云模型中对应的控制点的关系进行绝对定向,获取绝对控制信息,进而获取密集点云模型的真实空间位置。
在具体实施中,绝对控制信息,是指控制密集点云模型转换到真实空间位置的七个变换参数,包括一个缩放系数,三个旋转角度和三个坐标方向的平移变量。
步骤2,计算密集点云中各点的法向量,并依据各点的法向量计算相应的局部产状。
本发明实施例中,采用最小二乘法根据待测点与局部邻域内预设数量的最近邻点,进行拟合得到拟合平面,将拟合平面的法向量作为待测点的法向量;
取拟合平面与水平面之间的夹角作为倾角,取拟合平面法向量在水平面投影的方向作为倾向,倾角取值范围为0°~90°,倾向取值范围为0°~360°,将倾角和倾向的组合作为待测点的局部产状。
在具体实施中,倾角和倾向根据拟合平面的空间几何关系,利用结构面法向量计算得到,局部产状可以用于评价待测点的出露方向等空间几何特征信息。
参阅图2,其为本发明提供的同质区域单元示意图。
步骤3,将地质对象(光学影像序列)按照影像纹理语义划分为多个同质区域单元,对于同质区域单元内具有一致性的各像素点集合确定为结构面单元。
本发明实施例中,按照以下超像素分割距离度量模型D
D
其中,L、a和b分别表示颜色模型中的三个要素,S表示同质区域单元网格间隔,m表示同质区域单元致密性控制变量,d
若D
本发明实施例中,对于同质区域单元内各像素点的局部产状进行统计,若倾角之间的偏差不超过预设倾角偏差以及倾向之间的偏差不超过预设倾向偏差的像素点占比,超过预设比例,则确定为结构面单元。
在具体实施中,同质区域单元,指同时具有高度相似的地质纹理语义(L,a,b)和平面位置(x, y)的像素点所构成的集合。采用超像素分割距离度量模型将地质对象按照二维影像纹理语义划分为同质区域单元集合,实现地质对象的初步分割,根据同质区域单元内各像素点的局部产状分布情况进行统计分析,得到结构面单元和非结构面单元的初步判别结果。
在具体实施中,同质区域单元网格间隔S是指超像素分割距离度量模型在进行划分时的网格间隔,对于不同的同质区域单元设定的预设同质阈值可以不同。
在具体实施中,如果预设倾角偏差和预设倾向偏差均为5°,预设比例为80%,则在同质区域单元内80%像素点的倾角之间的误差在5°之内,倾向也在5°之内,则该同质区域单元可以标记为结构面单元,反之标记为非结构面单元。
步骤4,将具有相似产状的邻接结构面单元进行合并聚类,建立结构面单元集合的地质拓扑邻接图。
参阅图3,其为本发明提供的拓扑邻接图;参阅图4,其为本发明提供的裂隙等密度图。
本发明实施例中,在合并聚类之前,可以采用裂隙等密度图对结构面单元进行统计,确定裂隙发育程度满足预设裂隙标准的多个结构面单元作为结构面单元集合;通过同质区域单元作为点,边连接相邻同质区域单元,建立结构面单元集合的拓扑邻接图。
本发明实施例中,将结构面单元内像素点的倾角方差和倾向方差,均低于对应的预设方差阈值的局部产状的均值作为结构面单元的产状,若结构面单元的产状之间的偏差不超过预设产状阈值,则认定为具有相似产状;基于结构面单元集合和相似产状进行结构面的合并聚类。
参阅图5,其为本发明提供的待合并的结构面单元示意图。
在具体实施中,利用裂隙等密度图对结构面单元进行统计分析,得到裂隙发育程度较高的结构面单元集合,将结构面单元的产状作为结构面单元合并聚类依据,通过建立结构面单元集合的拓扑邻接图,将具有相似产状特征且邻接的结构面单元进行合并聚类,实现地质结构面快速准确提取。
在具体实施中,参阅图4,裂隙等密度图,是指以裂隙极点图为基础,用中心密度计和边缘密度计分别统计极点图内和边缘的裂隙点,将每次统计的数字分别记在圆心上,选择适当等密线距把等值的点连接起来的图。
在具体实施中,参阅图7,中心密度计可以从左到右,由上到下,顺次统计小圆内的极点数,并标注在方格“十”中心,即小圆中心上,将每次统计的数字分别记在圆心上;边缘密度计统计圆周附近残缺小圆内的极点数,将两端小圆极点数相加,记在有“十”中心的残缺小圆中心。
在具体实施中,裂隙极点图是指将结构面产状数据投影在赖特网(图6所示)的岩石组构图,裂隙等密度图上某点的极坐标为(ρ,θ),其中,ρ表示倾角(取值范围0°~90°),θ表示倾向(取值范围0°~360°)。
在具体实施中,拓扑邻接图,指用于描述同质区域单元(包括结构面单元和非结构面单元)之间的拓扑邻接关系,拓扑邻接图由节点D和边E构成,每个节点代表一个同质区域单元,每条边连接两个空间上相邻的同质区域单元。
在具体实施中,在拓扑邻接图寻找空间邻接的结构面单元,若结构面单元的产状之差(倾角之差和倾向之差)小于阈值,则认为具有相似产状,执行合并聚类,并更新拓扑邻接图,循环遍历直至所有结构面单元均不存在邻接关系,停止聚类,完成地质拓扑邻接图,实现地质结构面提取。
在具体实施中,根据预设裂隙标准确定得到结构面单元集合,基于裂隙程度进行分类后的结构面单元集合再依据相似产状进行结构面的合并聚类,由于裂隙程度表征结构面的空间几何特征信息,合并效率显著提高。
在具体实施中,相比于现有技术中基于影像的结构面提取方法多仅依赖于岩体的颜色和纹理信息,本发明所提供的方法额外应用了空间三维产状信息,特别对于仅利用纹理信息难以准确识别的面状出露结构面具有良好的提取效果,有效降低结构面提取的难度,提高结构面提取的准确性;同时,本方案中基于裂隙等密度图统计分析的结构面单元聚类方法,有效提高了结构面提取的效率。
本发明还提供一种基于光学影像的地质结构面提取装置,包括:采集单元、产状计算单元、结构面确定单元和合并单元,其中:
所述采集单元,用于采集地质对象的光学影像序列,从中生成密集点云,并获取密集点云的真实空间位置;
所述产状计算单元,用于计算密集点云中各点的法向量,并依据各点的法向量计算相应的局部产状;
所述结构面确定单元,用于将地质对象按照影像纹理语义划分为多个同质区域单元,对于同质区域单元内具有一致性的各像素点集合确定为结构面单元;
所述合并单元,用于将具有相似产状的邻接结构面单元进行合并聚类,建立结构面单元集合的地质拓扑邻接图。
本发明实施例中,所述采集单元,用于基于运动恢复结构生成光学影像序列对应的稀疏点云,通过多视图聚簇和基于面片模型的密集匹配重建密集点云。
本发明实施例中,所述采集单元,用于通过在地质对象上布设的控制点,采用全站仪测量控制点的物方空间坐标,并根据控制点与密集点云中对应点的关系获取绝对控制信息,确定密集点云的真实空间位置。
本发明实施例中,所述产状计算单元,用于采用最小二乘法根据待测点与局部邻域内预设数量的最近邻点,进行拟合得到拟合平面,将拟合平面的法向量作为待测点的法向量;
取拟合平面与水平面之间的夹角作为倾角,取拟合平面法向量在水平面投影的方向作为倾向,倾角取值范围为0°~90°,倾向取值范围为0°~360°,将倾角和倾向作为待测点的局部产状。
本发明实施例中,所述结构面确定单元,用于按照以下超像素分割距离度量模型D
D
其中,L、a和b分别表示颜色模型中的三个要素,S表示同质区域单元网格间隔,m表示同质区域单元致密性控制变量,d
若D
本发明实施例中,所述结构面确定单元,用于对于同质区域单元内各像素点的局部产状进行统计,若倾角之间的偏差不超过预设倾角偏差以及倾向之间的偏差不超过预设倾向偏差的像素点占比,超过预设比例,则确定为结构面单元。
本发明实施例中,所述合并单元,用于采用裂隙等密度图对结构面单元进行统计,确定裂隙发育程度满足预设裂隙标准的结构面单元集合,通常以单组结构面单元数目大于结构面单元总数的5%为预设裂隙标准;通过同质区域单元作为点,边连接相邻同质区域单元,建立结构面单元集合的拓扑邻接图。
本发明实施例中,所述合并单元,用于将结构面单元内像素点的倾角方差和倾向方差,均低于对应的预设方差阈值的局部产状的均值作为结构面单元的产状,若结构面单元的产状之间的偏差不超过预设产状阈值,则认定为具有相似产状;基于结构面单元集合和相似产状进行结构面的合并聚类。
- 基于光学影像的地质结构面提取方法、装置
- 一种基于BIM环境下的地质界线点云数据提取方法、提取装置及存储介质