电动车辆自适应能量回收控制方法及电动汽车
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及电动汽车技术领域,具体来说,是一种电动车辆自适应能量回收控制方法及电动汽车。
背景技术
在新能源汽车领域,动力电池作为动力源,为整车的驱动电机及其他高压部件提供电能,整车控制器(以下称VCU)作为整车控制单元负责采集油门踏板、制动踏板、档位等信号来判断驾驶员意图,对电机控制器发送控制指令。电机系统根据VCU的指令进行能量转化,在驱动车辆时,电机系统将电池的电能转化为动能,从而驱动车辆行驶。当滑行或踩下制动踏板进行制动时,电机系统通过滑行能量回馈或制动能量回馈的形式可以将车辆的动能转化为电能给动力电池充电。
在能量回馈时VCU根据车速和制动踏板开度决定是进入滑行能量回收还是制动能量回收。当车速大于设定值且踩下制动踏板时,VCU控制进入制动能量回收模式,能量回收转矩根据车速大小和制动踏板开度大小决定。
上述方案中进入制动能量回收模式时,制动转矩的大小通过查询VCU软件中车速和制动踏板的开度组成的表格获取,表格中不同车速和制动踏板开度对应的制动转矩可以通过标定获得,这种情况下如果整车载荷比较大,现有的标定扭矩值会造成能量回馈较少,机械制动占比大、制动距离长、影响续驶里程等问题,但是如果将表格中的制动转矩标定加大,就会出现整车小载荷时电制动太大影响舒适性、制动力过大引起ABS频繁介入车辆抖动等问题。
以上这种基于车速和制动踏板开度查表获得制动扭矩的形式无法自适应整车不同载荷工况,从而无法获得更多的能量回收和整车制动舒适性。
发明内容
本发明旨在提供一种电动车辆自适应能量回收控制方法及电动汽车,该控制方法能够根据整车载荷不同的工况自适应调整相同车速和制动踏板开度下的制动转矩值,从而在不影响制动舒适性和制动距离的前提下,提高制动能量回收占比,减小机械制动磨损、增加续驶里程。
为解决上述问题,本发明所采用的技术方案是:
电动车辆自适应能量回收控制方法,其特殊之处在于,该控制方法基于VCU通过制动时车速和制动开度查表获取的初始制动需求转矩T
具体的,所述控制方法包括:
VCU根据制动时车速和制动开度获取初始制动需求转矩T
VCU根据当前保存的整车质量m获取整车质量电制动补偿系数k
VCU根据当前坡度值α获取坡度电制动补偿系数k
利用公式T
电机系统根据VCU给定的制动能量回馈扭矩进行能量回收。
进一步的,所述整车质量电制动补偿系数k
进一步的,所述坡度电制动补偿系数k
所述当前保存的整车质量m,是一个基于车辆实时工况而不断更新的数据,该更新过程基于以下判断逻辑进行:
首先,预设一个整车质量预估值m
车辆启动行驶后,VCU实时采集电机的输出扭矩、车速、坡度、制动踏板等整车信号,并基于整车驱动力平衡公式并经过滤波处理得出当前工况下的整车质量m;
将当前工况下的整车质量m与内存中的整车质量预估值m
所述整车驱动力平衡公式为
所述当前坡度值α由坡道信号采集装置采集并传送至VCU。
本发明的一种自适应能量回收控制方法,能够解决现有能量回收策略中因制动扭矩跟车速、制动踏板开度为固定关系,且这种固定关系通过标定的方法如果给定过大,会出现导致整车小载荷时电制动过大影响舒适性、ABS频繁介入引起车辆抖动问题,如果给定过小又会导致整车大载荷时电制动较小无法获取更多的能量回收,影响电制动效率、加快机械制动磨损问题,无法根据车辆的不同载荷工况进行精确调整制动扭矩。
本申请的自适应能量回收控制方法,在车辆行驶过程中通过电机的输出扭矩、车速、坡度、制动踏板等整车信号估算整车质量,根据整车质量通过查表算法获得整车质量的电制动补偿系数;通过坡度信号采集装置获取当前坡度值,根据坡道坡度信号通过查表算法获得坡度的电制动补偿系数,通过计算的整车质量电制动补偿系数、坡度电制动补偿系数对不同载荷工况同车速和同制动踏板开度下的制动转矩值进行动态补偿,从而在不影响制动舒适性和制动距离的前提下,提高制动能量回收占比,减小机械制动磨损、增加续驶里程。
附图说明
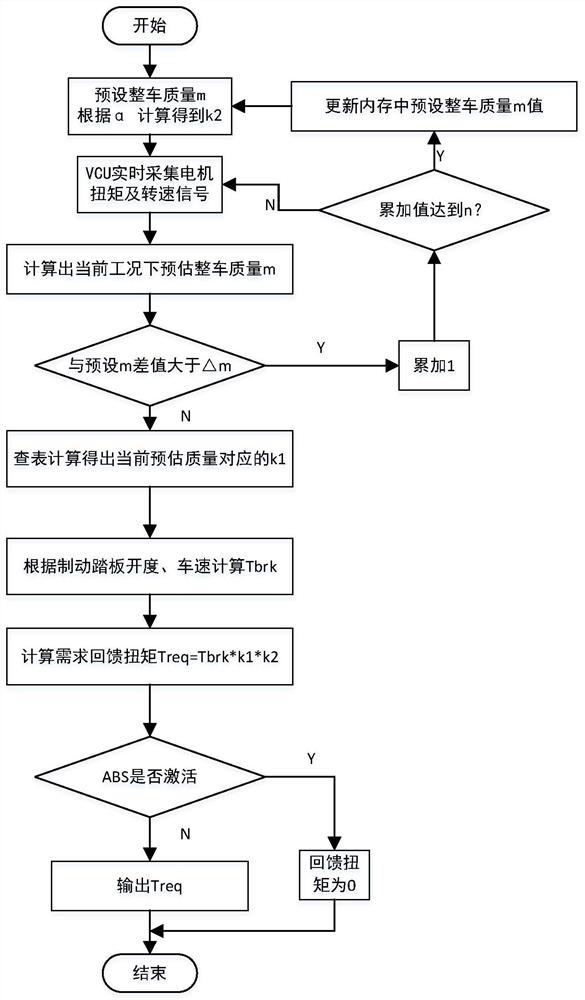
图1:实施例一的电动车辆自适应能量回收控制方法的控制流程图。
具体实施方式
下面将结合本实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
本实施例涉及一种电动车辆自适应能量回收控制方法,所述控制方法包括:
S1、车辆上电初始化;
S2、通过坡道信号采集装置获取当前坡度值α,坡道影响的坡度电制动补偿系数k
S3、设定整车质量预估值m
所述整车驱动力平衡公式为
将实时计算得出的当前工况下的整车质量m与设定整车质量预估值m0进行比较,如果差值的绝对值大于标定绝对值Δm,则进行累计计数加1,当连续n个(可标定)周期计算的整车质量与内存中的整车质量差值的绝对值均大于Δm标定绝对值,则判定为当前整车质量相对于预估值发生变化,将n个周期计算的整备质量m,去掉最大值、最小值并取平均值,作为最新的预设整车质量m并存储。
S4、VCU根据车速和制动踏板开度信号查表获得初始制动需求转矩T
车速和制动踏板开度信号对应关系表根据电机转矩特性、电池充电特性、整车制动舒适性等因素通过性能标定获得,保存的整车质量m和整车质量电制动补偿系数k
S5、VCU综合计算获得给定的制动回馈需求扭矩T
S6、VCU判断ABS是否处于激活状态,如果ABS没激活,并通过CAN线发送T
本申请提出的一种自适应能量回收控制方法,为了在车辆行驶过程中可以根据不同载荷工况调整同车速和制动踏板开度下的制动转矩值,在初始制动需求转矩的基础上考虑了整车质量影响的整车质量电制动补偿系数,以及坡道影响的坡度电制动补偿系数,在不影响制动舒适性和制动距离的前提下,提高制动能量回收占比,减小机械制动磨损、增加续驶里程。
综上所述,虽然本发明已以较佳实施例揭露如上,然其并非用以限定本发明,任何熟习此技艺者,在不脱离本发明的精神和范围内,当可作各种更动与润饰,因此本发明的保护范围当视后附的申请专利范围所界定者为准。
- 电动车辆自适应能量回收控制方法及电动汽车
- 一种电动汽车制动能量回收自适应控制方法