一种一体化鱼处理机器人
文献发布时间:2023-06-19 10:44:55
技术领域
本发明属于机器人领域,尤其是一种一体化鱼处理机器人。
背景技术
鱼是日常生活中的食材之一,具有丰富的营养,鱼需要进行处理才能进行烹饪食用,现有的处理方式是采用人工处理,人工处理鱼鳞容易处理不干净,鱼鳞人类消化困难容易造成消化不良,人工处理方式容易使鱼接触细菌,容易导致人细菌感染。
发明内容
本发明的目的是为解决现有技术存在的上述问题,提供一种一体化鱼处理机器人。
实现上述目的,本发明采取下述技术方案:
一种一体化鱼处理机器人,包括:输送装置、外部清理装置及内部清理装置,所述输送装置一侧固定连接有外部清理装置,所述外部清理装置一侧面固定连接有内部清理装置,所述外部清理装置位于输送装置与内部清理装置之间,所述外部清理装置包括:外壳二、隔板、多个除鳞装置及切割装置,所述外壳二一外侧面与输送装置固定连接,所述外壳二另一外侧面与内部清理装置固定连接,所述外壳二内部水平固定连接有隔板,所述外壳二两相对内侧壁水平固定连接有多个除鳞装置,所述多个除鳞装置位于隔板上方,所述外壳二内底面固定连接有切割装置,所述切割装置滑动穿出隔板与外壳二上顶面。
与现有技术相比,本发明的有益效果是:
本发明提供一种一体化鱼处理机器人,本发明可以代替人工处理鱼得方式来对鱼进行处理,可以将鱼鳞处理的更加干净,同时还能减少细菌的滋生,本发明可以对鱼一体化处理,加快了鱼得处理速度。
附图说明
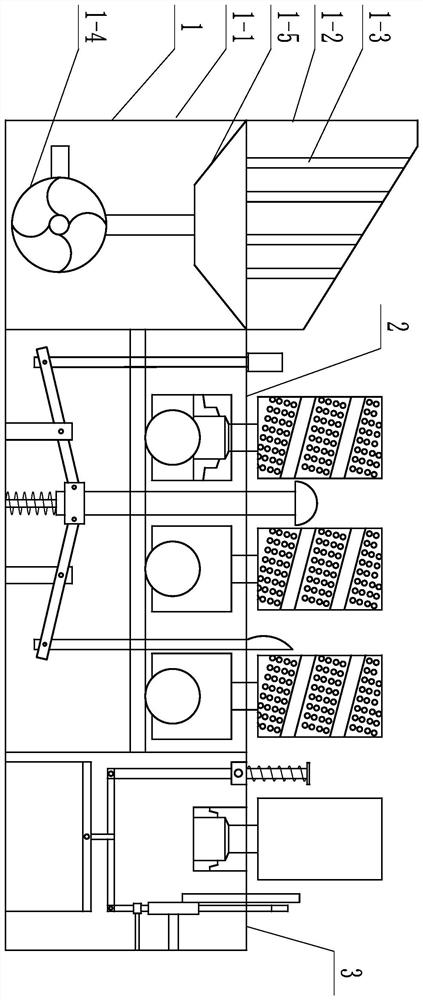
图1是本发明的整体结构侧视图;
图2是外部清理装置侧视图;
图3是切割装置结构示意图;
图4是内部清理装置结构示意图;
图5是本发明的整体结构俯视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
具体实施方式一:如图1~图5所示,本实施方式披露了一种一体化鱼处理机器人,包括:输送装置1、外部清理装置2及内部清理装置3,所述输送装置1一侧固定连接有外部清理装置2,所述外部清理装置2一侧面固定连接有内部清理装置3,所述外部清理装置2位于输送装置1与内部清理装置3之间,所述外部清理装置2包括:外壳二2-1、隔板2-2、多个除鳞装置2-3及切割装置2-4,所述外壳二2-1一外侧面与输送装置1固定连接,所述外壳二2-1另一外侧面与内部清理装置3固定连接,所述外壳二2-1内部水平固定连接有隔板2-2,所述外壳二2-1两相对内侧壁水平固定连接有多个除鳞装置2-3,所述多个除鳞装置2-3位于隔板2-2上方,所述外壳二2-1内底面固定连接有切割装置2-4,所述切割装置2-4滑动穿出隔板2-2与外壳二2-1上顶面。
具体实施方式二:如图1所示,本实施方式是对具体实施方式一作出的进一步说明,所述输送装置1包括:外壳一1-1、运输台1-2、蜗轮1-4及聚集罩1-5,所述外壳一1-1一侧面与外壳二2-1一侧面固定连接,所述外壳一1-1上端固定连接有运输台1-2,所述运输台1-2为梯形,所述运输台1-2沿其长边方向设置圆锥形长槽,所述运输台1-2竖直设置有贯穿其高度的多个通气孔1-3,所述外壳一1-1内部固定连接有蜗轮1-4,所述运输台1-2下端固定连接有聚集罩1-5,所述蜗轮1-4出风口与聚集罩1-5固定连接并连通。
具体实施方式三:如图2、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述多个除鳞装置2-3设置为三个,每个所述除鳞装置2-3均包括:滑动基座2-3-1、导柱2-3-2、电动伸缩杆2-3-3、两个除磷辊子2-3-4、多个除磷片2-3-6及两个电机一2-3-7,所述导柱2-3-2一端与外壳二2-1一竖直内侧面固定连接,所述导柱2-3-2另一端滑动穿入滑动基座2-3-1一侧面,所述电动伸缩杆2-3-3固定端与外壳二2-1另一竖直内侧面固定连接,所述电动伸缩杆2-3-3活动端与滑动基座2-3-1另一侧面固定连接,所述滑动基座2-3-1内部沿其长度方向对称固定连接有两个电机一2-3-7,每个所述电机一2-3-7输出轴转动穿出滑动基座2-3-1,并与一个除磷辊子2-3-4固定连接,每个所述除磷辊子2-3-4外侧面设置有多个除磷片2-3-6,每个所述除磷辊子2-3-4外侧面设置有螺旋槽2-3-5。
具体实施方式四:如图3所示,本实施方式是对具体实施方式一作出的进一步说明,所述切割装置2-4包括:滑套2-4-1、滑柱2-4-2、弹簧一2-4-3、固定套2-4-4、挡板支臂2-4-7、挡板2-4-8、切割刀2-4-9、两个铰接柱2-4-5及两个铰接臂2-4-6,所述滑柱2-4-2一端滑动套装在滑套2-4-1内,所述滑柱2-4-2另一端设置有弹簧一2-4-3,所述滑柱2-4-2另一端竖直与外壳二2-1内底面固定连接,所述滑套2-4-1外端固定连接有固定套2-4-4,所述外壳二2-1内底面竖直固定连接有两个铰接柱2-4-5,所述两个铰接柱2-4-5以滑柱2-4-2为中心对称设置,每个所述铰接臂2-4-6中部分别与一个铰接柱2-4-5转动连接,每个所述铰接臂2-4-6一端分别与滑套2-4-1转动连接,一个所述铰接臂2-4-6另一端与挡板支臂2-4-7一端固定连接,所述挡板支臂2-4-7滑动穿出隔板2-2与外壳二2-1顶面,所述挡板支臂2-4-7另一端固定连接有挡板2-4-8,另一个所述铰接臂2-4-6另一端与切割刀2-4-9转动连接,所述切割刀2-4-9滑动穿出隔板2-2与外壳二2-1顶面,所述滑套2-4-1和切割刀2-4-9与三个除鳞装置2-3间隔交错设置。
具体实施方式五:如图4、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述内部清理装置3包括:外壳三3-1、收集箱3-2、箱盖3-3、固定柱3-4、支架一3-5、支架二3-6、联动装置3-7、支撑装置3-8及两个运输装置3-9,所述外壳二2-1另一侧面与外壳三3-1一侧面固定连接,所述外壳三3-1内底面固定连接有收集箱3-2,所述箱盖3-3两相对侧面中部与收集箱3-2转动连接,所述箱盖3-3上端固定连接有固定柱3-4,所述外壳三3-1两相对内侧面水平固定连接有支架一3-5,所述外壳三3-1一内侧面固定连接有支架二3-6,所述固定柱3-4上端固定连接有联动装置3-7,所述联动装置3-7一端滑动穿出支架一3-5,所述联动装置3-7另一端滑动穿出支架二3-6,所述支撑装置3-8外壳三3-1一内侧面转动连接有支撑装置3-8,所述支架二3-6位于支撑装置3-8下方,所述联动装置3-7与支撑装置3-8传动连接,所述外壳三3-1两相对内侧面分别固定连接有一个运输装置3-9,所述两个运输装置3-9对称设置。
具体实施方式六:如图4、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述联动装置3-7包括:联动杆3-7-1、联动柱3-7-2、弹簧二3-7-3、弹簧顶板3-7-4、双面齿条3-7-5及刮板3-7-6,所述联动杆3-7-1中部与固定柱3-4固定连接,所述联动柱3-7-2一端与联动杆3-7-1一端转动连接,所述联动柱3-7-2另一端滑动穿出支架一3-5,所述联动柱3-7-2另一端设置有弹簧二3-7-3,所述弹簧二3-7-3位于支架一3-5上方,所述联动柱3-7-2另一端固定连接有弹簧顶板3-7-4,所述双面齿条3-7-5一端与联动杆3-7-1另一端转动连接,所述双面齿条3-7-5另一端与支撑装置3-8传动连接,所述述双面齿条3-7-5另一端固定连接有刮板3-7-6。
具体实施方式七:如图4、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述支撑装置3-8包括:两个齿轮3-8-1及两个支撑臂3-8-2,所述两个齿轮3-8-1通过转动轴与外壳三3-1一内侧面转动连接,所述两个齿轮3-8对称设置,所述双面齿条3-7-5设置在两个齿轮3-8-1之间并与两个齿轮3-8-1啮合,所述两个齿轮3-8-1一侧端面竖直固定连接有两个支撑臂3-8-2。
具体实施方式八:如图4、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述两个运输装置3-9均包括:外壳四3-9-1、电机二3-9-2及运输辊子3-9-3,所述外壳四3-9-1与外壳三3-1一内侧面固定连接,所述外壳四3-9-1内部固定连接有电机二3-9-2,所述电机二3-9-2输出轴穿出外壳四3-9-1顶面并与运输辊子3-9-3固定连接,所述两个运输装置3-9位于联动柱3-7-2与支撑装置3-8之间。
本发明工作原理是:将冲洗干净的鱼不断的放在运输台1-2设置的圆锥形长槽内,本发明设置有内部电源,将蜗轮1-4通电将空气通过蜗轮1-4进气口吸入,再由出风口吹入聚集罩1-5内,蜗轮1-4起到加速空气流动的作用,空气在聚集罩1-5内通过多个通气孔1-3吹出,可以将鱼表面的水分吹干,防止鱼身水份过多发生打滑的现象,影响后续鱼得处理,鱼受到重力沿着圆锥形长槽向下滑动,将三个除鳞装置2-3设置的两个电机一2-3-7通电带动两个除磷辊子2-3-4转动,鱼沿着圆锥形长槽向下滑动接触到两个除磷辊子2-3-4时,由两个除磷辊子2-3-4夹住鱼继续带动鱼向前移动,同时两个除磷辊子2-3-4设置的除磷片2-3-6可以将鱼得鱼鳞刮掉,刮掉的鱼鳞沿着螺旋槽2-3-5落在外部清理装置2内部设置的隔板2-2上端进行收集,可以防止在去除鱼鳞时鱼鳞飞溅,造成环境污染以及避免人员受伤,将电动伸缩杆2-3-3通电,推动滑动基座2-3-1沿着导柱2-3-2往复移动,位于中间的滑动基座2-3-1移动方向与另外两个滑动基座2-3-1移动方向相反,滑动基座2-3-1往复移动可以使鱼在向前移动的同时进行蛇形走位,可以使鱼身一侧凸起,凸起一侧可以使鳞片与鳞片之间间隙变大,可以使除磷辊子2-3-4将鱼鳞处理的更加干净,鱼向前移动时触碰到滑套2-4-1时,使滑套2-4-1沿着滑柱2-4-2向下移动同时压缩弹簧一2-4-3,滑套2-4-1向下移动通过固定套2-4-4带动两个铰接臂2-4-6以铰接的两个铰接柱2-4-5为圆心向上转动,两个铰接臂2-4-6向上转动带动挡板支臂2-4-7与切割刀2-4-9向上移动,隔板2-2还起到了限位固定挡板支臂2-4-7与切割刀2-4-9的作用,挡板支臂2-4-7向上移动通过挡板2-4-8可以阻挡鱼不在通过圆锥形长槽滑下,当前一条鱼处理完成后挡板2-4-8落下,下一条鱼继续滑下进行处理;通过两个除磷辊子2-3-4在去除鱼鳞同时带动鱼向前移动,同时切割刀2-4-9向上移动,可以将鱼腹部切开,当鱼尾部与滑套2-4-1分离时,通过弹簧一2-4-3作用带动滑套2-4-1复位,同时使挡板支臂2-4-7与切割刀2-4-9向下移动复位,圆锥形长槽内下一条等待处理的与可以继续滑下,同时位于最右侧的两个除磷辊子2-3-4带动前一条鱼继续向前移动,触碰到联动柱3-7-2时带动联动柱3-7-2向下移动同时压缩弹簧二3-7-3,联动柱3-7-2向下移动带动联动杆3-7-1转动,联动杆3-7-1转动通过固定柱3-4带动箱盖3-3逆时针转动打开,同时联动杆3-7-1转动带动双面齿条3-7-5向上移动,支架一3-5与支架二3-6起到了支撑联动柱3-7-2与双面齿条3-7-5的作用,将电机二3-9-2通电带动运输辊子3-9-3转动,运输辊子3-9-3转动将鱼夹住同时带动鱼向前移动,鱼向前移动时使两个支撑臂3-8-2进入到切开的鱼的腹部内,双面齿条3-7-5向上移动带动两个齿轮3-8转动,两个齿轮3-8转动带动两个支撑臂3-8-2向相反方向移动展开,可以将鱼得腹部撑开,同时双面齿条3-7-5向上移动带动刮板3-7-6向上移动进入到与腹部内,运输辊子3-9-3转动带动鱼向前移动时刮板3-7-6可以将鱼得内脏刮掉,刮掉的内脏掉落在箱盖3-3上,沿着箱盖3-3滑动进收集箱3-2内进行收集存放,可以防止内脏过多与空气接触滋生细菌,当鱼尾与联动柱3-7-2分离时,通过弹簧二3-7-3作用带动联动柱3-7-2复位,同时使双面齿条3-7-5向下移动,双面齿条3-7-5向下移动同时通过两个齿轮3-8-1带动两个支撑臂3-8-2对向移动闭合,运输辊子3-9-3带动鱼继续向前移动直至鱼落下,这时鱼已经处理好可以进行收集运输,联动柱3-7-2复位带动联动杆3-7-1复位,联动杆3-7-1复位带动箱盖3-3转动关闭,可以避免细菌滋生。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种一体化鱼处理机器人
- 一种一体化鱼处理机器人