一种电子束焊机电子束流多模控制系统及其方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及电子书加工技术领域,更具体的说是涉及一种电子束焊机电子束流多模控制系统及其方法。
背景技术
电子束焊机的电子束流控制一般以稳定性为目标,电子束流幅值的采样信号作为反馈信号对电子束流进行闭环调节,通过调节栅偏电压或阴极加热功率来控制电子束流跟随其给定指令变化。
随着生产技术的发展,对电子束焊机的性能与功能提出了更高的要求。而常规电子束流的调节器设置在低压端,控制模式单一,且在调节的速度、精度上都难以满足新的要求。
因此,如何提供一种高性能且控制模式灵活的电子束流控制系统及其方法是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明提供了一种电子束焊机电子束流多模控制系统及其方法,用于实现电子束焊机的多模控制,拓展电子束焊机的加工功能。
为了实现上述目的,本发明采用如下技术方案:
一种电子束焊机电子束流多模控制系统,包括:总控装置、中央控制单元、电子枪工作电路、变送器和调节管;
所述总控装置与所述中央控制单元相连,用于将工作模式及设定参数发送至所述中央控制单元,并接收所述中央控制单元采集的电子枪运行参数;
所述中央控制单元还分别与所述变送器、所述调节管和所述电子枪工作电路相连,用于通过所述变送器采集的电子枪运行参数,并根据不同的工作模式,选择所述运行参数作为反馈量,将对应的所述设定参数与所述反馈量进行调节运算后得到栅偏电压控制信号u
所述变送器还与所述电子枪工作电路相连,用于获取所述电子枪工作电路内的采样信号,并将所获取的所述采样信号进行整形放大后发送至所述中央控制单元;
所述调节管还与所述电子枪工作电路相连,所述调节管的输出端接公共端,用于根据所述栅偏电压控制信号u
其中所述工作模式包括栅偏电压闭环调节模式、微束工作模式、常规束工作模式和脉冲束工作模式;
所述栅偏电压闭环调节模式时,所述设定参数为截止栅偏电压幅值
所述微束工作模式时,所述设定参数包括微束幅值
所述常规束工作模式时,所述设定参数包括电子束流幅值
所述脉冲束工作模式时,所述设定参数还包括大束流幅值
在τ
在τ
优选的,所述电子枪工作电路包括偏压支路,所述偏压支路包括相连的电阻R1和电阻R2,R1和R2相连的一端作为偏压支路输出端连接于所述变送器,其中,R1的另一端与电子枪的栅偏极相连,R2的另一端分别与所述调节管的输出端和电子枪阴极相连。
优选的,所述电子枪工作电路还包括束流支路、高压支路和加速电源;
所述束流支路包括电阻R3、电阻R4和稳压管Z1,R3与R4的一端均连接于Z1的K极相连,R3的另一端连接于电子枪阴极,R4的另一端连接于Z1的A极,Z1的K极作为电子束流采样信号输出端,Z1的A极作为微束采样信号输出端,Z1的K极与A极分别连接至所述变送器;并且电阻R4的阻值远大于电阻R3的阻值;
所述高压支路包括相连的R5和R6,R5和R6相连的一端作为高压支路输出端连接于所述变送器,R5的另一端分别连接于所述Z1的A极和所述加速电源的负输出端,R6的另一端连接于所述加速电源的正输出端;
所述加速电源的正输出端接地。
优选的,所述变送器包括偏压检测电路,所述偏压检测电路包括运放A75、电阻R715、电阻R716、电阻R717和电容C76;
所述偏压支路输出端经过R715连接于A75的反相输入端,R716的两端分别连接A75的反相输入端和A75的输出端,A75的输出端连接R717的一端,R717的另一端与C76的一端相接后作为偏压检测电路输出端连接至所述中央控制单元,A75的正相输入端和C76的另一端相接后接入公共端。
优选的,所述变送器包括微束检测电路、高压检测电路和放电检测电路;
所述微束检测电路包括运放A73、电阻R709~R711和电容C74;所述束流支路中Z1的A极经过R709连接于A73的反相输出端,R710的两端分别连接A73的反相输入端和A73的输出端,A73的输出端连接R711的一端,R711的另一端与C74的一端相接后作为微束检测电路输出端连接至所述中央控制单元,A73的正相输入端于C74另一端相接后接入公共端;
所述高压检测电路包括运放A72、电阻R704~R708和电容C73;所述高压支路输出端经过R705连接于A72的同相输入端,所述束流支路中Z1的A极还通过R704连接于A72的反相输入端;R707的两端分别连接于A72的反相输入端和输出端,A72的输出端连接R708的一端,R708的另一端与C73的一端相接后作为高压检测电路输出端连接至所述中央控制单元,C73的另一端接公共端,A72的同相输入端还经过R706接公共端;
所述放电检测电路包括555时基电路芯片A71、电阻R701~R703、电容C71和电容C72,组成单稳电路;A72的输出端经过C71和R702连接于A71的引脚2,R701连接于A71的引脚2与引脚8,A71的引脚8接引脚4及+V电源,引脚6经过C72接公共端,引脚3经过R703连接引脚6,引脚3还作为放电检测电路输出端连接所述中央控制单元,A71的引脚1接公共端。
优选的,所述变送器还包括束流检测电路,所述束流检测电路包括运放A74、电阻R712~R714和电容C75;
所述束流支路中Z1的K极经过R712连接于A74的反相输出端,R713的两端分别连接A74的反相输入端和A74的输出端,A74的输出端连接R714的一端,R714的另一端与C75的一端相接后作为束流检测电路输出端连接于所述中央控制单元,A74的正相输入端和C75的另一端相接后接入公共端。
优选的,所述中央控制单元包括光纤串口、存贮器、模数转换器、数字输入口、中央处理器和数模转换器;所述光纤串口、所述存贮器、所述模数转换器、所述数字输入口和所述数模转换器均与所述中央处理器相连;
所述光纤串口连接所述总控装置,用于实现所述总控装置与所述中央处理器之间的数据传输;
所述存贮器,用于对所述设定参数和采样数据进行存贮和调用;
所述模数转换器与所述变送器相连,用于接收所述变送器获取的所述电子枪运行参数,转换成对应的数字信号后并发送至所述中央处理器;
所述数字输入口与所述变送器相连,用于获取所述变送器获取的放电信号u
所述中央处理器,用于从光纤串口接收来自所述总控装置发送的工作模式及设定参数,并存贮至所述存贮器;用于通过所述变送器采集的电子枪运行参数,并根据不同的工作模式,选择所述运行参数作为反馈量和数字调节模式,将对应的所述设定参数与所述反馈量进行调节运算后得到栅偏电压控制信号u
所述数模转换器与所述调节管相连,用于将数字信号的u
优选的,还包括驱动电路,所述驱动电路分别与所述中央控制单元和所述调节管相连,用于将所述中央控制单元输出的所述栅偏电压控制信号u
A51的同相输入端分别连接R51、C51和R53,R51的另一端连接数模转换器的一端,A51的反相输入端分别连接R52和R54,C51、R53和R52的另一端均接入公共端,R54的另一端还连接A51的输出端,A51的输出端还与D51的A极相连,D51的K极分别连接D52的K极和R55,R55的另一端连接R56作为驱动电路的输出端与调节管的控制端相连,其中R56的另一端连接-V电源,D52的A极连接放电检测电路的输出端;
正常工作状态时,u
当放电时u
优选的,还包括变压器、辅助电源、整流滤波单元;
所述变压器用于变压及各绕组间的电气绝缘,其中包括第Ⅰ绕组、第Ⅱ绕组和第Ⅲ绕组,所述第Ⅰ绕组为一次绕做接供电电源,所述第Ⅱ绕组和所述第Ⅲ绕组为二次绕组,第Ⅱ绕组与所述辅助电源单元的输入端相连,第Ⅲ绕组与所述整流滤波单元的输入端相连;
所述辅助电源单元将所述第Ⅱ绕组的交流电经整流、滤波和/或变换后输出多路稳定直流电源,用于辅助供电,包括但不限于所述放电检测电路中的+V电源和所述驱动电路中的-V电源;
所述整流滤波单元的负输出端连接至电子枪栅偏极,正输出端连接所述调节管的输入端,所述整流滤波单元用于将交流电整流成脉动直流电,再经过滤波后输出平直的不可控直流电。
一种电子束焊机电子束流多模控制方法,包括以下步骤:
获取工作模式及设定参数;根据不同的工作模式,选择相应的所述设定参数和对应的所述运行参数作为反馈量,将所述设定参数与所述反馈量进行调节运算后得到栅偏电压控制信号u
同时,检测放电信号u
其中,根据不同的工作模式对应获取反馈量从而得到栅偏电压控制信号u
S1.栅偏电压闭环调节模式,选择所述设定参数为截止栅偏电压幅值
S2.获取启动电子束流的有效指令,判断工作模式,根据不同的工作模式,根据不同的方法来获取栅偏电压控制信号u
在微束工作模式时,选择所述设定参数为微束幅值
在常规束工作模式时,选择所述设定参数为电子束流幅值
所述脉冲束工作模式时,获取的所述设定参数还包括大束流幅值
在τ
在τ
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种电子束焊机电子束流多模控制系统及其方法,具备以下有益效果:
1、本发明中所公开的该系统结构简约,能够灵活有效地实现多种模式下对电子束的控制;
2、在高压端对电子枪运行参数进行采样,采样信号比常规的低压端采样信号的精度及其信噪比更高;
3、电子束流调节速度快,实现4参数脉冲电子束的控制;
4、电子束流调节精度高,特别是能在大功率的电子束焊机上实现微束(0.1mA以下)的稳定控制,有利于实现二次电子或背散射电子的成像,并容易实现焊缝无损寻迹与跟踪。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
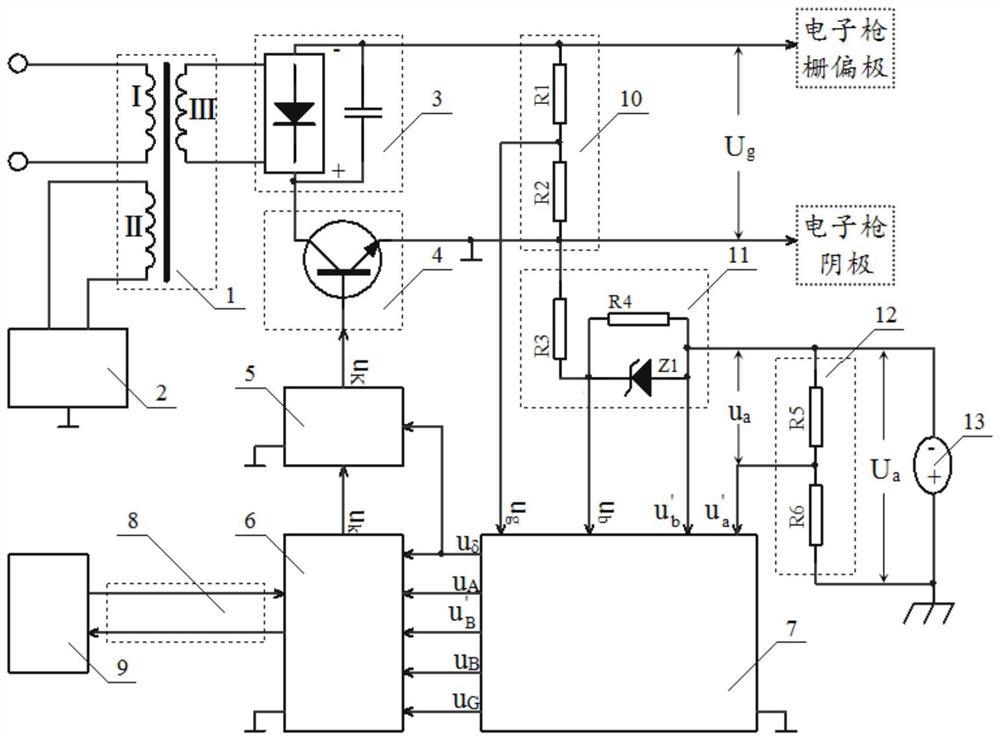
图1附图为本发明提供的一种电子束焊机电子束流多模控制系统的结构示意图;
图2附图为本发明提供的一种电子束焊机电子束流多模控制系统中变送器电路示意图;
图3附图为本发明提供的一种电子束焊机电子束流多模控制系统中加速电源放电检测及保护波形示意图;
图4附图为本发明提供的一种电子束焊机电子束流多模控制系统中中央控制器结构示意图;
图5附图为本发明提供的一种电子束焊机电子束流多模控制系统中驱动电路示意图;
图6附图为本发明提供的一种电子束焊机电子束流多模控制方法流程图;
图7附图为本发明提供的截止栅偏电压控制框图;
图8附图为本发明提供的微束控制框图;
图9附图为本发明提供的常规束控制框图;
图10附图为本发明提供的脉冲束控制框图;
图11附图为本发明提供的脉冲束控制波形示意图。
其中:1-变压器,2-辅助电源,3-整流滤波单元;4-调节管,5-驱动电路;6-中央控制单元,61-中央处理器,62-存贮器,63-数字输口,64-模数转换器,65-数模转换器,66-光纤串口,7-变送器,8-光纤;9-总控装置,10-偏压支路,11-束流支路,12-高压支路,13-加速电源。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例公开了一种电子束焊机电子束流多模控制系统,如图1所示,包括:总控装置9、中央控制单元6、电子枪工作电路、变送器7和调节管4;
总控装置9与中央控制单元6相连,用于将工作模式及设定参数发送至中央控制单元6,并接收中央控制单元6采集的电子枪运行参数;
中央控制单元6还分别与变送器7、调节管4和电子枪工作电路相连,用于通过变送器7采集电子枪的运行参数,并根据不同的工作模式,选择运行参数作为反馈量,将对应的设定参数与反馈量进行调节运算后得到栅偏电压控制信号u
变送器7还与电子枪工作电路相连,用于获取电子枪工作电路内的采样信号,并将所获取的采样信号进行整形放大后发送至中央控制单元6;
调节管4还与电子枪工作电路相连,调节管4的输出端接公共端,用于根据栅偏电压控制信号u
其中工作模式包括栅偏电压闭环调节模式、微束工作模式、常规束工作模式和脉冲束工作模式;
栅偏电压闭环调节模式时,设定参数为截止栅偏电压幅值
微束工作模式时,设定参数包括微束幅值
常规束工作模式时,设定参数包括电子束流幅值
脉冲束工作模式时,设定参数还包括大束流幅值
在τ
在τ
在本实施例中:
调节管4可以选用双极型晶体管、场效应晶体管、IGBT管或电子管等。
为了进一步实施上述技术方案,电子枪工作电路包括偏压支路10,偏压支路10包括相连的电阻R1和电阻R2,R1和R2相连的一端作为偏压支路10输出端连接于变送器7,其中,R1的另一端与电子枪的栅偏极相连,R2的另一端分别与调节管4的输出端和电子枪阴极相连。
在本实施例中:
偏压支路10输出端输出栅偏电压采样信号u
为了进一步实施上述技术方案,电子枪工作电路还包括束流支路11、高压支路12和加速电源13;
束流支路11包括电阻R3、电阻R4和稳压管Z1,R3与R4的一端均连接于Z1的K极相连,R3的另一端连接于电子枪阴极,R4的另一端连接于Z1的A极,Z1的K极与A极均连接至变送器7;并且电阻R4的阻值远大于电阻R3的阻值;
高压支路12包括相连的R5和R6,R5和R6相连的一端作为高压支路12输出端连接于变送器7,R5的另一端分别连接于Z1的A极和加速电源13的负输出端,R6的另一端连接于加速电源13的正输出端;
加速电源13的正输出端接地。
在本实施例中:
束流支路11中,电阻R4的阻值远大于电阻3的阻值,当微束工作时,稳压管Z1未击穿,Z1的A极输出微束采样信号u'
高压支路12输出端与束流支路11中Z1的A极间输出高压采样信号u
为了进一步实施上述技术方案,如图2所示,变送器7包括偏压检测电路,偏压检测电路包括运放A75、电阻R715、电阻R716、电阻R717和电容C76;
偏压支路10输出端经过R715连接于A75的反相输入端,R716的两端分别连接A75的反相输入端和A75的输出端,A75的输出端连接R717的一端,R717的另一端与C76的一端相接后作为偏压检测电路输出端连接至中央控制单元6,A75的正相输入端和C76的另一端相接后接入公共端。
在本实施例中:
运放A75输出
为了进一步实施上述技术方案,变送器7包括微束检测电路、高压检测电路和放电检测电路;
微束检测电路包括运放A73、电阻R709~R711和电容C74;束流支路11中Z1的A极经过R709连接于A73的反相输出端,R710的两端分别连接A73的反相输入端和A73的输出端,A73的输出端连接R711的一端,R711的另一端与C74的一端相接后作为微束检测电路输出端连接至中央控制单元6,A73的正相输入端于C74另一端相接后接入公共端;
高压检测电路包括运放A72、电阻R704~R708和电容C73;高压支路12输出端经过R705连接于A72的同相输入端,束流支路11中Z1的A极还通过R704连接于A72的反相输入端;R707的两端分别连接于A72的反相输入端和输出端,A72的输出端连接R708的一端,R708的另一端与C73的一端相接后作为高压检测电路输出端连接至中央控制单元6,C73的另一端接公共端,A72的同相输入端还经过R706接公共端;
放电检测电路包括555时基电路芯片A71、电阻R701~R703、电容C71和电容C72,组成单稳电路;A72的输出端经过C71和R702连接于A71的引脚2,R701连接于A71的引脚2与引脚8,A71的引脚8接引脚4及+V电源,引脚6经过C72接公共端,引脚3经过R703连接引脚6,引脚3还作为放电检测电路输出端连接所述中央控制单元,A71的引脚1接公共端。
在本实施例中:
运放A72输出为
取R704=R705、R706=R707,
则
运放A73输出
放电检测电路中,当放电时,高压取样信号u
为了进一步实施上述技术方案,变送器7还包括束流检测电路,束流检测电路包括运放A74、电阻R712~R714和电容C75;
束流支路11中Z1的K极经过R712连接于A74的反相输出端,R713的两端分别连接A74的反相输入端和A74的输出端,A74的输出端连接R714的一端,R714的另一端与C75的一端相接后作为束流检测电路输出端连接于中央控制单元6,A74的正相输入端和C75的另一端相接后接入公共端。
在本实施例中:
运放A74输出
为了进一步实施上述技术方案,如图4所示,中央控制单元6包括光纤串口66、存贮器62、模数转换器64、数字输入口63、中央处理器61和数模转换器65;光纤串口66、存贮器62、模数转换器64、数字输入口63和数模转换器65均与中央处理器61相连;
光纤串口66连接总控装置9,用于实现总控装置9与中央处理器61之间的数据传输;
存贮器62,用于对设定参数和采样数据进行存贮和调用;
模数转换器64与变送器7相连,用于接收变送器7获取的电子枪运行参数,转换成对应的数字信号后并发送至中央处理器61;
数字输入口63与变送器7相连,用于获取变送器7获取的放电信号u
中央处理器61,用于从光纤串口66接收来自总控装置9发送的工作模式及设定参数,并存贮至存贮器62;用于通过变送器7采集的电子枪运行参数,并根据不同的工作模式,选择运行参数作为反馈量和数字调节模式,将对应的设定参数与反馈量进行调节运算后得到栅偏电压控制信号u
数模转换器65与调节管4相连,用于将数字信号的u
为了进一步实施上述技术方案,如图5所示,还包括驱动电路5,驱动电路5分别与中央控制单元6和调节管4相连,用于将中央控制单元6输出的栅偏电压控制信号u
A51的同相输入端分别连接R51、C51和R53,R51的另一端连接数模转换器65的一端,A51的反相输入端分别连接R52和R54,C51、R53和R52的另一端均接入公共端,R54的另一端还连接A51的输出端,A51的输出端还与D51的A极相连,D51的K极分别连接D52的K极和R55,R55的另一端连接R56作为驱动电路5的输出端与调节管4的控制端相连,其中R56的另一端连接-V电源,D52的A极连接放电检测电路的输出端;
正常工作状态时,u
当放电时u
为了进一步实施上述技术方案,还包括变压器1、辅助电源2、整流滤波单元3;
变压器1用于变压及各绕组间的电气绝缘,其中包括第Ⅰ绕组、第Ⅱ绕组和第Ⅲ绕组,第Ⅰ绕组为一次绕做接供电电源,第Ⅱ绕组和第Ⅲ绕组为二次绕组,第Ⅱ绕组与辅助电源2单元的输入端相连,第Ⅲ绕组与整流滤波单元3的输入端相连;
辅助电源2单元将第Ⅱ绕组的交流电经整流、滤波和/或变换后输出多路稳定直流电源,用于辅助供电,包括但不限于所述放电检测电路中的+V电源和所述驱动电路5中的-V电源;
整流滤波单元3的负输出端连接至电子枪栅偏极,正输出端连接调节管4的输入端,整流滤波单元3用于将交流电整流成脉动直流电,再经过滤波后输出平直的不可控直流电。
一种电子束焊机电子束流多模控制方法,如图6所示,包括以下步骤:
获取工作模式及设定参数;根据不同的工作模式,选择相应的设定参数和对应的运行参数作为反馈量,将设定参数与反馈量进行调节运算后得到栅偏电压控制信号u
同时,检测放电信号u
其中,根据不同的工作模式对应获取反馈量从而得到栅偏电压控制信号u
S1.栅偏电压闭环调节模式,选择设定参数为截止栅偏电压幅值
S2.获取启动电子束流的有效指令,判断工作模式,根据不同的工作模式,根据不同的方法来获取栅偏电压控制信号u
在微束工作模式时,选择设定参数为微束幅值
在常规束工作模式时,选择设定参数为电子束流幅值
脉冲束工作模式时,获取的设定参数还包括大束流幅值
在τ
在τ
在本实施例中:
S1.起动栅偏电源,中央控制单元6对栅偏电压U
栅偏电压闭环调节一直持续到起动电子束流的指令到来为此,起动电子束流的指令有效,栅偏电压保持最后u
S2.起动电子束流,中央控制单元6对电子束流I
微束工作模式:以
常规束工作模式:以
脉冲束工作模式:在大束时间τ
在上述过程中,中央控制单元6一直监控放电的发生,一旦u
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种用于电子束焊机的电子光学控制系统及方法
- 一种用于电子束焊机的电子光学控制系统及方法