一种基于数字高程模型的山峰绕射点测量方法、系统、设备及介质
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及绕射点测量技术领域,具体涉及一种基于数字高程模型的山峰绕射点测量方法、系统、设备及介质。
背景技术
目前,人类的生存和活动主要局限在地球的表层和周边的部分空间范围内。无线电波作为无线电通信业务的载体,也主要在这些空间内进行远程信息的传递。地球表面起伏地形及地貌构成了无线电波在自然环境中传播的重要边界条件,地形根据地面的不规则程度将其分为不同的类型,无线电波在不同类型的地形中传播将会产生不同类型的传播机制,主要概括为无线电波的反射、绕射和散射等。
在地面移动无线电通信的点对应的区域网络中,大多数传播路径在第一菲涅尔椭球的空间区域内无线电波被起伏地形或地貌所遮挡,存在一个或多个单独障碍,电波绕过传播路径上障碍物的现象称为绕射,突出地形和建筑物之类的障碍,电波将以绕射的方式越过这类障碍而传播,无线电波的能量在传播过程中将受到严重的衰减,因此估计这些障碍损耗是有必要的。
在微波和超短波通信中常常遇到主障碍是个孤立山峰的情况,如果障碍物比较陡峭,且横向有一定的宽度,则可将其视为刃峰,刃峰绕射障碍的横向无限延伸、纵向延伸半个空间,即假定障碍物为一半无限吸收屏,电波投射至屏上不发生散射和反射,将被全部吸收,并且屏脊尖锐。在实际情况中,作为绕射障碍的山峰,其山体是粗糙的或者多树木,可见不管山体的坡度和厚度,都可近似地被当成吸收屏。因此,以上假设在实际情况是近似成立的,可把无线电波在起伏地形传播路径中的山峰近似为刃形山峰,进行绕射机制的计算。
现有的获取起伏地形环境下山峰绕射点的方法,主要通过实地测量或借助数字高程模型手动筛选,不仅浪费人力物力而且在测量和筛选的过程会存在误差大的缺点,并且只对地面的地形和环境进行了分类,对于地面障碍物的分类只是从地形的起伏程度分成了平原、丘陵、山区等地形障碍,由于地面起伏较大的区域,如山区、丘陵地形,只是用地形起伏程度来进行模糊的划分是不够准确的,不能准确的表示出地形上山峰、山谷和山麓特征区域,因此现有技术对于起伏地形的特征区域表达是缺乏完备性的,对于无线电波传播路径中存在遮挡的情况是不能准确的提取不规则起伏地形中的地形特征,对于确定性传播模型,如基于射线跟踪算法传播模型的计算是需要提取高精度的地形特征以进行准确的地形建模,从而实现精确的电磁传播预测。
公开号为[CN101090301]的专利申请公开了“一种无线电波路径损耗仿真测量方法”,其测量方法步骤包括:输入数字地图,确定地图矩阵与路损矩阵,并获得传播模型和发射天线参数;根据所述发射天线参数以及要测量的范围,生成一系列以发射天线为起点的分层射线,在每条射线上取一系列取样点,并根据地图矩阵中与取样点位置对应的地图栅格确定有效取样点;根据所述有效取样点位置在地图中对应的地理信息,计算发射天线的有效高度以及绕射损耗,并结合所述传播模型,计算有效取样点的路径损耗;将有效取样点的路径损耗作为与该有效取样点对应的地图栅格的路径损耗,保存入路损矩阵中。由于该发明中刃峰的计算原则是:从发射天线到接收天线牵一条线,这条线与山峰的交点集合即为刃峰集合,但是在实际的地形环境中许多的起伏地形是不规则的,存在着特殊的凸起与凹陷,因此仅通过收、发天线连线与山峰的交点来获取刃峰是不全面的,不能获得实际地形中的真正刃峰的同时还不能获取地形中的山谷和山麓特征,因此具有考虑因素不全面,预测结果不准确的缺点。
公开号为[CN110677296]的专利申请公开了“一种计算机模拟在单刃峰地形中进行无线电波通信的方法”,其方法步骤包括:S1、加载三维数字地图;S2、在所述三维数字地图上设置通信发射机和接收机位置;S3、设定所述通信发射机和所述接收机使用的通信设备的工作频率;S4、在所述三维数字地图上,在所述通信发射机和所述接收机之间形成地形高程剖面图;S5、根据所述三维数字地图以及所述地形高程剖面图,判断单刃峰地形;S6、计算地形衰减修正因子A(U),S7、计算无线电波的自由空间传输损耗;S8、根据所述地形衰减修正因子A(U)和所述自由空间传输损耗计算无线电波传输损耗;S9、将所述无线电波传输损耗作为所述无线电波通信的衰减值进行通信。以及公开号为[CN110677205]的专利申请公开了“一种计算机模拟在双峰地形中进行无线电波通信的方法”,其方法步骤包括:S1、加载三维数字地图;S2、在所述三维数字地图上设置通信发射机和接收机位置;S3、设定所述通信发射机和所述接收机使用的通信设备的使用频率;S4、在所述三维数字地图上,在所述通信发射机和所述接收机之间形成地形高程剖面图;S5、根据所述三维数字地图以及所述地形高程剖面图,判断双峰地形;所述双峰地形包括第一峰与第二峰;S6、计算地形衰减修正因子A(U);S7、计算无线电波自由空间传输损耗;S8、根据地形衰减修正因子以及无线电波自由空间传输损耗A(U),计算无线电波传输损耗;S9、将所述无线电波传输损耗作为所述无线电波通信的衰减值进行模拟通信。由于在真实地理地形环境中,仅存在单个或双个刃峰的地形是过于理想的,在地面移动无线电通信的点对区域网络中,大多数传播路径在第一菲涅尔椭球的空间区域内无线电波通常被多个单独障碍所遮挡,因此具有考虑因素不全面,预测结果不准确的缺点。
公开号为[CN110581740]的专利申请公开了“一种计算机模拟在不规则地形中进行无线电波通信的方法”,其方法步骤包括:S1、加载三维数字地图;S2、在三维数字地图上设置通信发射机和接收机位置;S3、设定通信发射机和接收机使用的通信设备的工作频率;S4、在三维数字地图上,在通信发射机和接收机之间形成地形高程剖面图;S5、根据三维数字地图以及地形高程剖面图,判断不规则地形;S6、计算地形衰减修正因子A(U),步骤S6包括以下步骤:S61:引入参数Δh用于表征地形不规则程度;S62:建立不同Δh下,地形衰减修正因子距发射机距离关系;S63:计算地形衰减修正因子A(U):S7、计算无线电波自由空间传输损耗;S8、计算无线电波传输损耗;S9、将无线电波传输损耗作为无线电波通信的衰减值进行模拟通信。由于在近地面点对区域的无线网规中,大多数传播路径在第一菲涅尔椭球的空间区域内无线电波被起伏地形或地貌所遮挡,存在多个单独障碍,只是用地形起伏程度来进行模糊的划分是不够准确的,不能准确的表示出地形上山峰、山谷和山麓特征区域,因此具有考虑因素不全面,预测结果不准确的缺点。
发明内容
为了克服上述现有技术的缺点,本发明的目的在于提供一种基于数字高程模型的山峰绕射点测量方法、系统、设备及介质,通过数字高程模型,对真实地形环境上的山谷、山峰进行特征进行提取,采用地面高度拾取函数、二维剖面轮廓计算函数对复杂地形环境进行精细化、多层次环境特征提取,根据提取的特征参量进行筛选并计算,得到基于数字高程模型的山峰绕射点测量结果;因此具有考虑因素全面、准确率高、普适性强的特点。
为了实现上述目的,本发明采用的技术方案是:
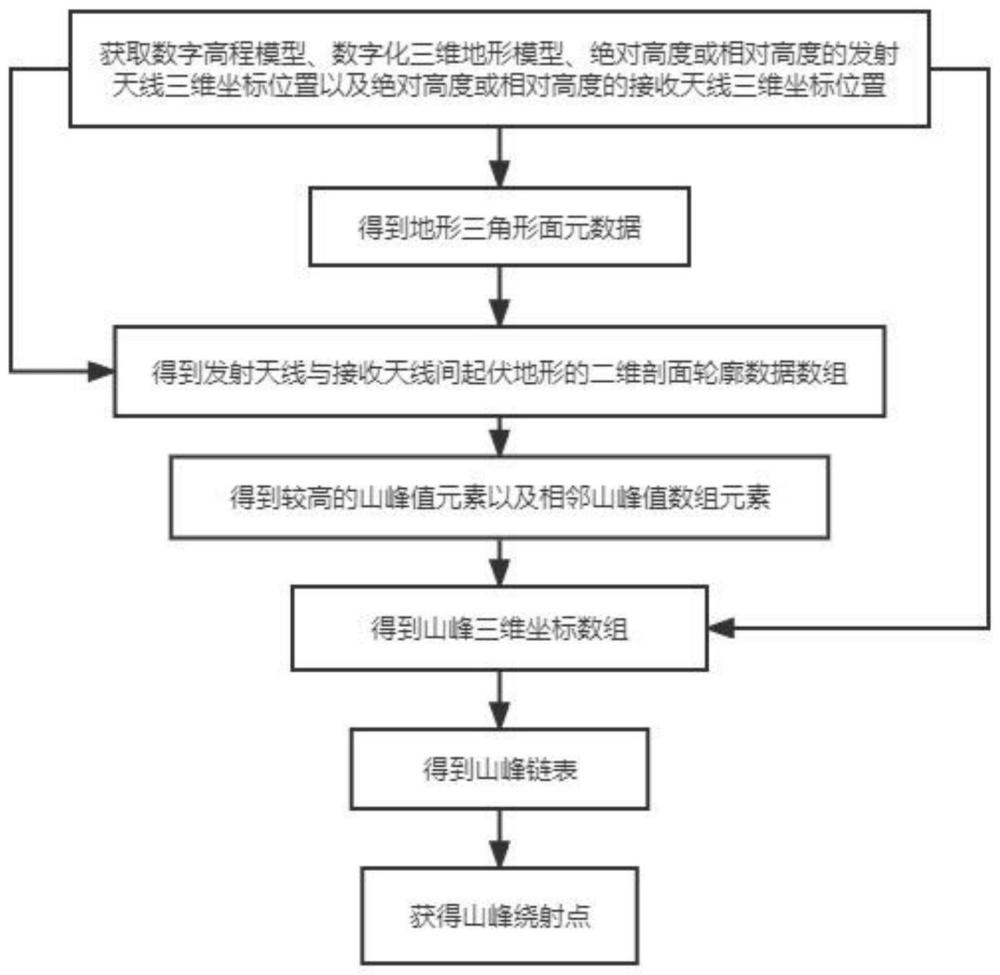
一种基于数字高程模型的山峰绕射点测量方法,包括以下步骤:
步骤一,获取数字高程模型、数字化三维地形模型、绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置;
步骤二,将步骤一获取的数字化三维地形模型依据网格精度进行三角形面元剖分,得到地形三角形面元数据;
步骤三,将步骤二得到的地形三角形面元数据、步骤一得到的绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置使用二维剖面轮廓计算函数计算,得到发射天线与接收天线间起伏地形的二维剖面轮廓数据数组;
步骤四,将步骤三得到的起伏地形二维剖面轮廓数据数组,比较相邻两个二维剖面轮廓数组元素,筛选得到较高的山峰值元素以及相邻山峰值数组元素;
步骤五,将步骤四得到的较高的山峰值元素、相邻山峰值数组元素以及步骤一得到绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,依次进行计算、筛选、集合,得到山峰三维坐标数组;
步骤六,基于步骤五获取的山峰三维坐标数组,依次判断相邻两个山峰之间是否存在新的遮挡点,若是,则进入步骤七;若否,则继续判断直至所有山峰遍历完毕,通过正向循环山峰三维坐标数组,得到山峰链表;
步骤七,基于步骤六中得到的存在遮挡点的相邻山峰,获取相邻两个峰之间存在的遮挡点也就是山峰绕射结点,将山峰绕射结点插入到山峰链表的结点,得到山峰链表;
步骤八,将步骤六以及步骤七得到的山峰链表赋值给山峰绕射路径,获得山峰绕射点。
所述步骤一的具体过程为,导入.asc和.txt后缀格式的数字高程模型,将数字高程模型加载成表征起伏地形仿真环境的数字化三维地形模型,在与数字化三维地形模型相同的坐标系下,输入发射天线以及接收天线的三维坐标位置,使用地面高度拾取函数,将发射发射天线的三维坐标位置(x
所述的地面高度拾取函数表示为:
其中,z
所述的平面方程表示为:
A×(x
其中,
所述步骤二的具体过程为,将步骤一得到的数字化三维地形模型中的网格节点进行按行遍历,将相邻的两行数据中相邻的两个网格节点构成一个网格的四个三维坐标顶点即DEM[i][j]、DEM[i+1][j]、DEM[i][j+1]以及DEM[i+1][j+1],其中三个三维坐标顶点即可构成一个三角形面元,按顺时针顺序对三角形面元进行存储,即:DEM[i][j]、DEM[i+1][j]以及DEM[i][j+1]或DEM[i+1][j]、DEM[i+1][j+1]以及DEM[i][j+1],将所有三角形面元先按行、后按列排序,得到地形三角形面元数据。
所述步骤三的具体过程为,将步骤二得到的地形三角形面元数据、步骤一得到的绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,使用二维剖面轮廓计算函数,建立单位矢量,即从发射天线出发,沿发射天线至接收天线方向按固定步长遍历到接收天线终止,依次获取每个步长投影点所在地形平面的高度,将每一个步长投影点和其对应的地形高度组成三维坐标(x
所述二维剖面轮廓计算函数表示为:
对于发射天线投影点和接收天线投影点构成的斜率不存在,即x
其中,x
对于发射天线投影点和接收天线投影点构成的斜率为0,即x
其中,x
对于发射天线投影点和接收天线投影点构成的斜率存在且不为0,即x
其中,x
所述步骤四的具体过程为,根据步骤三得到的起伏地形二维剖面轮廓数据数组,比较相邻两个二维剖面轮廓数组元素,判断当前元素是否为峰值,若是,则将当前元素存入山峰值数组;若否,则当前元素为山谷值元素,将山谷值元素删除;判断存入的山峰值数组两峰值数组元素的距离是否大于搜索间距,若是,则保留较高的山峰值元素,若否,则保留相邻山峰值数组元素。
所述步骤五的具体过程为,将步骤四中得到的较高的山峰值元素以及相邻山峰值数组元素、步骤一得到绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,利用障碍点余隙计算公式计算,得到障碍点余隙,判断发射天线与接收天线的山峰障碍点余隙是否大于零,若是,则保留当前山峰值元素;若否,则去除当前山峰值元素,将保留的当前山峰值元素按顺序集合,得到山峰三维坐标数组。
所述的障碍点余隙的计算公式为:
其中,K为等效地球半径系数;d
一种基于数字高程模型的山峰绕射点测量系统,包括:
地形加载模块:用于将数字高程模型加载表征成起伏地形仿真环境的数字化三维地形模型;
地形三角形面元剖分模块:用于将数字化三维地形模型依据网格精度进行三角形面元剖分,得到地形三角形面元数据;
天线高度设定模块:用于获取绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置;
二维剖面轮廓计算模块:用于根据地形三角形面元数据、绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置使用二维剖面轮廓计算函数,得到发射天线与接收天线间起伏地形的二维剖面轮廓数据数组;
山峰值元素获取与筛选模块:用于比较相邻两个二维剖面轮廓数组元素,判断当前元素是否为峰值,若是,则将当前元素存入山峰值数组;若否,则当前元素为山谷值元素,将山谷值元素删除;判断存入的山峰值数组两峰值数组元素的距离是否大于搜索间距,若是,则保留较高的山峰值元素,若否,则保留相邻山峰值数组元素;
绕射点筛选模块:用于将得到的较高的山峰值元素以及相邻山峰值数组元素、绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,利用障碍点余隙计算公式计算,得到障碍点余隙,判断发射天线与接收天线的山峰障碍点余隙是否大于零,若是,则保留当前山峰值元素;若否,则去除当前山峰值元素,将保留的当前山峰值元素顺序集合,得到山峰三维坐标数组;
地形遮挡判断模块:用于判断相邻两个峰之间是否存在新的遮挡点,若存在遮挡点,获取遮挡点即山峰绕射结点,并将山峰绕射节点存入山峰链表,得到新的山峰链表;若不存在遮挡点,判断山峰是否遍历完毕,若山峰已遍历完毕,输出山峰绕射路径;若山峰未遍历完毕,则继续判断相邻两个峰之间是否存在新的遮挡点,并进行迭代;根据得到的遍历完毕的山峰和山峰链表赋值给山峰绕射路径,获得山峰绕射点;
地形特征计算模块:用于基于数字高程模型,并结合地形加载模块、地形三角形面元剖分模块、天线高度设定模块和二维剖面轮廓计算模块,在指定的搜索间距内,以及指定的发射天线和接收天线之间的山峰和山谷地形进行特征的提取。
一种基于数字高程模型的山峰绕射点测量设备,包括:
存储器:用于存储实现所述一种基于数字高程模型的山峰绕射点测量方法的计算机程序;
处理器,用于执行所述计算机程序时实现所述一种基于数字高程模型的山峰绕射点测量方法。
一种计算机可读存储介质,
所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时能够实现所述一种基于数字高程模型的山峰绕射点测量方法。
相对于现有技术,本发明的有益效果在于:
1.在特定的野外起伏地形环境下,本发明相比于传统的地形野外测图,采用数字高程模型,通过使用最少的采样点来恢复和重建地形表面,可改善复杂地形表面山谷、山峰特征的缺乏性,对地形数据进行二次处理,获取起伏地形二维剖面轮廓数据、山峰顶点地形特征,可动态调整二维剖面线与山峰顶点搜索间距,保证山峰绕射点测量的准确性。
2.本发明由于结合数字高程模型与地面高度拾取函数、二维剖面轮廓计算函数,使用计算机对复杂地形环境进行精细化、多层次环境特征提取,综合考虑地形的各类特征,有效节省了实地测量带来人力和物力的浪费,以及人为测量带来的误差,对于真实地形环境上的特征提取过程中,在保证精度的同时,还可以节省人力和物力以提高工作效率并且本发明能综合运用上述函数,全面高效的完成山峰绕射路径的提取。
综上所述,本发明通过数字高程模型,对真实地形环境上的山谷、山峰进行特征进行提取,采用地面高度拾取函数、二维剖面轮廓计算函数对复杂地形环境进行精细化、多层次环境特征提取,根据提取的特征参量进行筛选并计算,得到基于数字高程模型的山峰绕射点测量结果;因此,具有考虑因素全面、准确率高、普适性强的特点。
附图说明
图1是本发明的方法流程框图。
图2是本发明实施例提供的地形三角形面元剖分示意图。
图3是本发明实施例提供的山体二维剖面获取算法示意图。
图4是本发明实施例提供的山体二维剖面示意图。
图5是本发明实施例提供的山体仿真环境示意图。
图6是本发明实施例提供的山体二维剖面效果图。
图7是本发明实施例提供的山峰效果图。
图8是本发明实施例提供山峰绕射点和绕射路径效果图。
具体实施方式
下面结合附图对本发明作详细叙述。
参见图1,一种基于数字高程模型的山峰绕射点测量方法,包括以下步骤:
步骤一,获取数字高程模型、数字化三维地形模型、绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置;所述的绝对高度是发射天线或接收天线与海平面的垂直距离,所述的相对高度是发射天线或接收天线与地面的垂直距离;具体过程为,导入.asc和.txt后缀格式的数字高程模型,将数字高程模型加载成表征起伏地形仿真环境的数字化三维地形模型,在与数字化三维地形模型的相同坐标系下,输入发射天线和接收天线的三维坐标位置,使用地面高度拾取函数,将发射发射天线的三维坐标位置(x
所述地面高度拾取函数表示为:
其中,z
所述的平面方程表示为:
A×(x
其中,
步骤二,将步骤一获取的数字化三维地形模型依据网格精度进行三角形面元剖分,得到地形三角形面元数据;具体过程为,将步骤一得到的数字化三维地形模型中的网格节点进行按行遍历,将相邻的两行数据中相邻的两个网格节点构成一个网格的四个三维坐标顶点即DEM[i][j]、DEM[i+1][j]、DEM[i][j+1]以及DEM[i+1][j+1],其中三个三维坐标顶点即可构成一个三角形面元,按顺时针顺序对三角形面元进行存储,即DEM[i][j]、DEM[i+1][j]以及DEM[i][j+1]或DEM[i+1][j]、DEM[i+1][j+1]以及DEM[i][j+1],将所有三角形面元先按行,后按列排序,得到地形三角形面元数据;用三角形面元数据更加准确地反映地形的复杂性,提高模型的准确性和精度;
步骤三,将步骤二得到的地形三角形面元数据、步骤一得到的绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置使用二维剖面轮廓计算函数,得到发射天线与接收天线间起伏地形的二维剖面轮廓数据数组;具体过程为,将步骤二得到的地形三角形面元数据以及步骤一得到的绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,使用二维剖面轮廓计算函数,建立单位矢量,即从发射天线出发,沿发射天线至接收天线方向按固定步长遍历到接收天线终止,依次获取每个步长投影点所在地形平面的高度,将每一个步长投影点和其对应的地形高度组成三维坐标(x
所述二维剖面轮廓计算函数表示为:
对于发射天线投影点和接收天线投影点构成的斜率不存在,即x
其中,x
对于发射天线投影点和接收天线投影点构成的斜率为0,即x
其中,x
对于发射天线投影点和接收天线投影点构成的斜率存在且不为0,即x
其中,x
表1
表1为二维剖面轮廓数据,其中x
步骤四,将步骤三得到的起伏地形二维剖面轮廓数据数组,比较相邻两个二维剖面轮廓数组元素,判断当前元素是否为峰值,若是,则将当前元素存入山峰值数组;若否,则当前元素为山谷值元素,将山谷值元素删除;判断存入的山峰值数组两峰值数组元素的距离是否大于搜索间距,若是,则保留较高的山峰值元素,若否,则保留相邻山峰值数组元素;
步骤五,将步骤四得到的较高的山峰值元素、相邻山峰值数组元素以及步骤一得到绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,利用障碍点余隙计算公式计算,得到障碍点余隙,判断发射天线与接收天线的山峰障碍点余隙是否大于零,若是,则保留当前山峰值元素;若否,则去除当前山峰值元素,将保留的当前山峰值元素顺序集合,得到山峰三维坐标数组;所述步骤五中的障碍点余隙的计算公式为:
其中,K为等效地球半径系数;d
步骤六,基于步骤五获取的山峰三维坐标数组,依次判断相邻两个山峰之间是否存在新的遮挡点,若是,则进入步骤七;若否,则继续判断直至所有山峰遍历完毕,通过正向循环山峰三维坐标数组,以得到山峰链表;
表2
表2为山峰点数据,其中x
步骤七,基于步骤六中得到的存在遮挡点的相邻山峰,获取相邻两个峰之间存在的遮挡点也就是山峰绕射结点,将山峰绕射结点插入到山峰链表的结点,得到山峰链表;
步骤八,将步骤六以及步骤七得到的山峰链表赋值给山峰绕射路径,获得山峰绕射点。
表3
表3为绕射点数据,即山峰绕射路径,其中x
一种基于数字高程模型的山峰绕射点测量系统,包括:
地形加载模块:用于将数字高程模型加载表征成起伏地形仿真环境的数字化三维地形模型;
地形三角形面元剖分模块:用于将数字化三维地形模型依据网格精度进行三角形面元剖分,得到地形三角形面元数据;
天线高度设定模块:用于获取绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置;
二维剖面轮廓计算模块:用于根据地形三角形面元数据、绝对高度或相对高度的发射天线的三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置使用二维剖面轮廓计算函数,得到发射天线与接收天线间起伏地形的二维剖面轮廓数据数组;
山峰值元素获取与筛选模块:用于比较相邻两个二维剖面轮廓数组元素,判断当前元素是否为峰值,若是,则将当前元素存入山峰值数组;若否,则当前元素为山谷值元素,将山谷值元素删除;判断存入的山峰值数组两峰值数组元素的距离是否大于搜索间距,若是,则保留较高的山峰值元素,若否,则保留相邻山峰值数组元素;
绕射点筛选模块:用于将得到的较高的山峰值元素以及相邻山峰值数组元素、绝对高度或相对高度的发射天线三维坐标位置以及绝对高度或相对高度的接收天线三维坐标位置,利用障碍点余隙计算公式计算,得到障碍点余隙,判断发射天线与接收天线的山峰障碍点余隙是否大于零,若是,则保留当前山峰值元素;若否,则去除当前山峰值元素,将保留的当前山峰值元素顺序集合,得到山峰三维坐标数组;
地形遮挡判断模块:用于判断相邻两个峰之间是否存在新的遮挡点,若存在遮挡点,获取遮挡点即山峰绕射结点,并将山峰绕射节点存入山峰链表,得到新的山峰链表;若不存在遮挡点,判断山峰是否遍历完毕,若山峰已遍历完毕,输出山峰绕射路径;若山峰未遍历完毕,则继续判断相邻两个峰之间是否存在新的遮挡点,并进行迭代;根据得到的遍历完毕的山峰和山峰链表赋值给山峰绕射路径,获得山峰绕射点;
地形特征计算模块:用于基于数字高程模型,并结合地形加载模块、地形三角形面元剖分模块、天线高度设定模块和二维剖面轮廓计算模块,在指定的搜索间距内,以及指定的发射天线和接收天线之间的山峰和山谷地形进行特征的提取。
一种基于数字高程模型的山峰绕射点测量设备,包括:
存储器:用于存储实现所述的一种基于数字高程模型的山峰绕射点测量方法的计算机程序;
处理器,用于执行所述计算机程序时实现所述的一种基于数字高程模型的山峰绕射点测量方法。
一种计算机可读存储介质,
所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时能够实现一种基于数字高程模型的山峰绕射点测量方法。
参见图2,为本发明实施例中的地形三角形面元剖分示意图,x、y轴为平面坐标,z轴为对应的高程,单位均为m,本发明基于数字高程模型数据,对地形进行规则的三角形网络建模,地形的规则三角形网络是用大小形状均接近的三角形规则排列覆盖整个地形,三角形的顶点等间隔排列,用直线相连,每个三角形构成一个斜平面,三角面的三个顶点信息包含了和三角面在原始数字高程模型中的位置信息,从数字高程模型数据转化的三角面将按照从西到东、从南到北的顺序排列,用确定平面最小单元的三个点构成的三角形,每个三角面元都将作为拟合曲面内插功能运算函数的最小处理单元以及射线跟踪算法的处理单元去判断射线的传播形式,可以看出将地形进行三角形面元体素化处理后,可以使地形数据有序存储,在保证计算精度的同时可提高计算效率。
图3为本发明实施例中提供的发射天线和接收天线之间山体二维剖面计算方法示意图,横、纵坐标分别为对应的二维投影点坐标,Tx为发射天线,Rx为接收天线,根据指定步长Step沿步骤三建立的发、收天线矢量方向,依次进行相等步长间隔插值,即可获取二维投影点(x
图4为本发明实施例提供的山体二维剖面示意图,x、y轴为平面坐标,z轴为对应的高程,Tx为发射天线,Rx为接收天线,根据指定步长Step沿步骤三建立的发、收天线矢量方向,将该矢量分解到x、y两个方向的矢量分别向x、y两个方向进行Δx、Δy步进,即可得到下一个投影点(x
图5为本发明实施例提供的仿真环境示意图,x、y轴为平面坐标,z轴为对应的高程,单位均为m,由图5可知,贴合地形的虚线为发射天线与接收天线之间的山体二维剖面,三角形“▲”为剖面之间获取的山峰点,星号“*”为符合绕射条件的绕射点,直线为无线电波传播的绕射路径,基于上述获取的电波传播路径可为基于射线跟踪算法的确定性电波传播模型的电磁预测提供路径支持。
图6为本发明实施例提供的山体二维剖面效果图,横坐标x为发射天线与接收天线连线二维投影点之间距离,纵坐标y为对应的高程信息,图6为图5地形下的二维剖面效果图。
图7为本发明实施例提供的山峰点效果图,横坐标x为发射天线与接收天线连线二维投影点之间距离,纵坐标y为对应的高程信息,图7为图5地形下的山峰点效果图,可直观的看出通过本发明可以准确获取山峰点的位置。
图8为本发明实施例提供的绕射点和绕射路径效果图,横坐标x为发射天线与接收天线连线二维投影点之间距离,纵坐标y为对应的高程信息,图8为图5地形下的绕射点和绕射路径的二维效果图,可直观看出本发明所获取的绕射点和绕射路径的准确性高。
- 一种基于倾斜摄影的测量方法、系统、存储介质及设备
- 一种基于数字高程模型的洪水淹没分析方法、系统、设备及存储介质
- 基于数字高程模型的汇水区提取方法、装置、设备及介质