基于星形张拉整体单元的直线方管道模块化探测机器人及行走方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及一种张拉整体管道探测机器人技术,具体是基于星形张拉整体单元的直线方管道模块化探测机器人及行走方法。
背景技术
随着城市规模的不断扩大和现代化程度的日益提高,各种市政管线越来越密集,越来越复杂,管理的工作量也越来越大。但是采用人工清洁和维护管道的方法耗时耗力。管道机器人能够深入到管道内部,克服管道空间狭小的困难,代替人工对管道进行清理维护,将大大减小管道维护的难度,提高管道清理维护的效率。
对于应用于直线管道探测的管道机器人,现有的机器人在外形结构和爬行方法上各式各样。例如采用轮子挤压管道壁的方法或使用磁性来使机器人贴着管道壁爬行、利用多足机器人在管道爬行等。但现有的机器人往往质量大、体积大,这样使得机器人耗能过大,且工作时占用管道,限制了其应用潜力。
张拉整体机器人轻质高效,抗冲击性强,具有良好运用前景。
根据查阅文献资料, 2021年3月哈尔滨工程大学学报上发表的《三杆星型张拉整体可展结构的运动分析》描述了三杆星形张拉整体结构的构成以及折展分析,但是未将其与机器人结合,仅停留在理论分析层面。
2014 IEEE International Conference on Robotics & Automation (ICRA)上发表的《DuCTT: a Tensegrity Robot for Exploring Duct Systems》描述了一种现有的张拉整体管道探测机器人——DuCTT,它由2个四面体组成,依靠索驱动实现运动控制,但其控制索数量多,还需辅以杆的伸缩才能实现机器人的运动,控制策略较复杂。
发明内容
针对上述技术问题,本发明提供一种控制简单、易于装配、轻质高效且运行时不阻塞管道的基于三杆星形张拉整体单元的直线方管道模块化探测机器人及行走方法。
技术方案:
一种基于星形张拉整体单元的直线方管道模块化探测机器人,包括:多个结构相同的三杆星形张拉整体单元模块,多个三杆星形张拉整体单元模块通过连接节点轴向刚性串接保持共线;
每个所述三杆星形张拉整体单元模块包括:
一个中心驱动杆,其两端分别刚性连接有一个所述连接节点,分别是第一连接节点和第二连接节点,
所述第一连接节点上设有第一径向连接板;
3个第一径向索单元,三个所述第一径向索单元的一端分别与所述第一径向连接板连接, 3个第一径向索单元的另一端按照顺时针分别编号为A、B、C三个端点,中心驱动杆的端点为O,
3个第二径向索单元,三个所述第二径向索单元的一端分别与所述第二径向连接板连接,
3个第二径向索单元的另一端按照顺时针分别编号为D、E、F三个端点,中心驱动杆的端点为O’,
3个斜索单元,分别连接AD端点之间、BE端点之间以及CF端点之间,
3个直杆单元,分别连接AE端点之间、BF端点之间以及CD端点之间,
初始状态下,A、B、C三个端点组成等边三角形ABC,O为等边三角形ABC中心,D、E、F三端点组成等边三角形DEF,O’为等边三角形DEF中心;
等边三角形ABC和等边三角形DEF等大但相互偏转了30°;
ABC三端点确定的平面平行于DEF三端点确定的平面;
OO’连线为水平状态,CD连线为水平状态,A、F两端点与管道下底面接触,C、D两端点靠近管道两侧壁;
所述斜索单元和径向索单元均为预应力索;
所述中心驱动杆单元包括1个固定杆和1个伸缩杆,通过作动器调节所述伸缩杆与固定杆的相对运动,以改变中心驱动杆单元的长度;
每个三杆星形张拉整体单元都具有折展性能,依靠中心驱动杆的伸缩实现结构变形,
按纵波法原理依次控制中心杆的长度变化实现机器人运动。
进一步的,所述斜索单元包括:
1根弹簧,位于斜索单元的最中间;
2段第一绳索,分别连接在所述弹簧的两端,第一绳索的另一端通过第一弹簧钩与设置在所述杆单元端部的固定环连接;所述弹簧保持在受拉状态,使得斜索单元存在预应力。
进一步的,所述径向索单元包括:
1段第二绳索,其一端通过第二弹簧钩与所述径向连接板上圆孔连接,另一端通过第三弹簧钩与所述杆单元端部的固定环连接。
进一步的,所述径向连接板上设有连接外管,所述中心驱动杆的端部设有插接在所述连接外管中的连接内管,连接内管与连接外管插接后通过连接销实现固定。
本发明进一步公开了一种基于所述基于星形张拉整体单元的直线方管道模块化探测机器人的行走方法,
每个三杆星形张拉整体单元中有一根所述直杆单元平行于管道底面,每个三杆星形张拉整体单元有两个直杆单元的端点与管道下底面接触;
在纵波法中,第一个三杆星形张拉整体单元首先伸长,伸长至最长后即开始缩短,之后的每个三杆星形张拉整体单元在前一个三杆星形张拉整体单元缩短的同时伸长;
当最后一个三杆星形张拉整体单元缩短后,一个纵波在机器人中传递,机器人前进一段距离;
单纵波法是机器人中仅传递一个波,多纵波法是机器人中同时传递多个波,以加快运动效率。
有益效果:本发明与现有技术相比,具有以下优点:
第一.从控制方法上看,相较于大多数张拉整体机器人作动器数量多、控制方案复杂、控制精度要求高,本发明仅需控制中心驱动杆的长度变化,且控制策略容易实现,其余杆件和索均被动变化,控制方法简单可靠。
第二.从机器人形态上看,相较于普通管道机器人质量大、体积大,本发明的机器人仅由杆索构成,质量轻且占用管道截面积小,工作时不会堵塞管道。
第三.本发明设计的机器人装配性模块性强,张拉整体单元采用相同的三杆星形张拉整体单元,可由多个相同的斜索单元、直杆单元、径向索单元、中心驱动杆单元装配组成,可在现场当场组装,使用便利。
综上所述,该张拉整体管道探测机器人控制方法简单、爬行管道时不阻塞管道、轻质高效、抗冲击性强、模块性装配性强,具有较好的运用前景。
附图说明
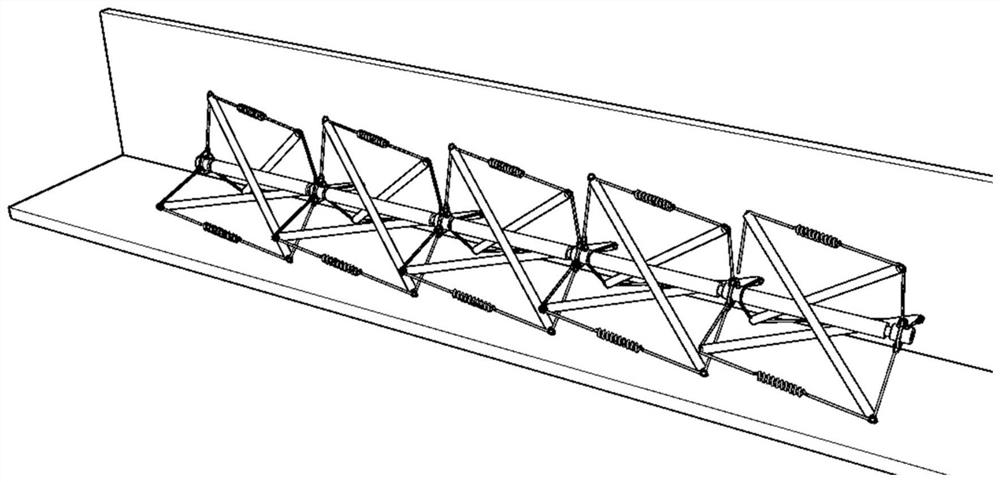
图1为本发明的基于星形张拉整体单元的直线方管道探测模块化机器人初始状态下的轴测图隐藏一侧管道壁;
图2为本发明的基于星形张拉整体单元的直线方管道探测模块化机器人初始状态下的正视图隐藏一侧管道壁;
图3为本发明的基于星形张拉整体单元的直线方管道探测模块化机器人初始状态下的侧视图;
图4为本发明的基于星形张拉整体单元的直线方管道探测模块化机器人初始状态下的俯视图;
图5为本发明的三杆星形张拉整体单元模块的轴测图;
图6为本发明的斜索单元的示意图;
图7为本发明的直杆单元的示意图;
图8为本发明的径向索单元的示意图;
图9为本发明的中心驱动杆单元的示意图;
图10为本发明的连接节点及插销的正视图;
图11为本发明的连接节点及插销的轴测图;
图12为本发明的连接节点的连接前示意图;
图13为本发明的连接节点的连接后示意图;
图14为本发明的索模块中弹簧钩与直杆单元中固定环连接后的示意图;
图15为本发明的三杆星形张拉整体中心驱动杆一次伸长缩短的变形示意图;
图16为本发明的单纵波法运动步态示意图;
图17为本发明的多纵波法运动步态示意图;
图18为本发明的机器人实施例1中n=5时,单纵波法运动的示意图;
其中,1为三杆星形张拉整体单元模块,2为张拉整体单元模块间的连接节点,201为节点、202为销钉、203为圆孔、204为销孔,3为管道,4为斜索单元、401为第一绳索、402为弹簧、403为第一弹簧钩,5为直杆单元、501为直杆、502为杆上的固定环,6为径向索单元、601为第二绳索、602为第二弹簧钩,603为第三弹簧钩,7为中心驱动杆单元、701为固定杆、702为伸缩杆、703为销孔。
具体实施方式
以下的说明本质上仅仅是示例性的而并不是为了限制本公开、应用或用途。应当理解的是,在全部附图中,对应的附图标记表示相同或对应的部件和特征。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
下面结合图1-18所示的基于星形张拉整体单元的直线方管道探测模块化机器人对本发明的具体实施方式做进一步的描述。
如图1-4所示,展示出本发明的张拉整体管道探测机器人示意图。各个张拉整体单元通过连接节点2连接,连接节点2两端安装在每个张拉整体单元的中心杆7端点,使得相邻单元中心驱动杆的连接方式为刚接,保持共线。连接时,每个张拉整体单元中有一根杆平行于管道底面,每个单元有两个杆端点与管道下底面接触,水平杆两个端点尽量与管道侧壁贴合。6根径向索确定两个互相平行的平面,且平面垂直于机器人前进方向。张拉整体单元的中心杆为水平,每个中心杆共线,且中心杆平行于机器人前进方向。
如图5所示,展示所述张拉整体单元结构组装图,包含三个斜索单元4,三个直直杆单元5,三个径向索单元6,一个中心驱动杆单元7。
对于张拉整体单元节点,前面3个节点按照顺时针编号为A、B、C,中心杆端点为O;后面3个节点按照顺时针编号为D、E、F,中心杆端点为O’。3个斜索单元分别连接AD、BE、CF,3个直杆单元分别连接AE、BF、CD,6个径向索单元分别连接AO、BO、CO、DO’、EO’、FO’,中心驱动杆单元连接OO’。
初始状态下,A、B、C三节点组成等边三角形ABC,O为等边三角形ABC中心,D、E、F三节点组成等边三角形DEF,O’为等边三角形DEF中心。
等边三角形ABC和等边三角形DEF等大但相互偏转了30°;
ABC三节点确定的平面平行于DEF三节点确定的平面。
OO’连线为水平状态,CD连线为水平状态,A、F两节点与管道下底面接触,C、D两节点靠近管道两侧壁。
如图6所示,斜索单元由2段第一绳索401、1根弹簧402、2个第一弹簧钩403组成,弹簧位于两段第一绳索之间,机器人组装完毕后,弹簧需要保持在受拉状态,使得斜索单元存在预应力。
如图7所示,直杆单元由直杆501、2个固定环502组成。
如图8所示,径向索单元由1段第二绳索601、第一弹簧钩602和第二弹簧钩603组成。
如图9所示,中心驱动杆单元由1个固定杆701、1个伸缩杆702、2个销孔703组成。中心驱动杆单元需要安置作动器,调节伸缩杆与固定杆的相对运动,以改变中心驱动杆单元的长度。
如图10、11所示,连接节点由节点201和2个插销202组成。节点上开6个圆孔203,圆孔用以连接相邻两个单元共6个径向索单元中的弹簧钩。
由于张拉整体单元的几何关系,6个圆孔的角度间隔分别为:90°,30°,90°,30°,90°,30°。
节点上开2个销孔204,用以连接相邻两个单元的中心驱动杆单元。
如图12、13所示,节点连接时,中心驱动杆两端的销孔703需与节点上的销孔204对齐,而后插入插销202,实现相邻单元的中心驱动杆的刚接。径向索单元中的弹簧钩连接至节点的圆孔203上,实现径向索单元和中心直杆单元的铰接。
如图14所示,斜索单元和径向索单元中的弹簧钩需对应连接至直杆单元的固定环上,每个固定环上均连接两个弹簧钩。
如图15所示,每个三杆张拉整体单元都具有折展性能,依靠中心驱动杆的伸缩可以实现结构变形。
如图16、17所示,在纵波法中,第一个单元首先伸长,伸长至最长后即开始缩短,之后的每个单元在前一个单元缩短的同时伸长。当最后一个单元缩短后,一个纵波在机器人中传递,机器人前进一段距离。单纵波法是机器人中仅传递一个波,多纵波法是机器人中同时传递多个波,可以加快运动效率。
实施例1:
如图18所示,选取张拉整体单元模块数n=5,作为机器人的的具体组成,展示其在单纵波运动步态下的前进过程。
上述实施例仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和等同替换,这些对本发明权利要求进行改进和等同替换后的技术方案,均落入本发明的保护范围。
- 一种模块化搭建张拉整体结构的方法
- 基于张拉整体的模块化管道机器人
- 基于张拉整体的模块化管道机器人