非接触式寻边定位搬运机构
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及IC载板收板技术领域,尤其涉及一种IC载板收板机的非接触式寻边定位搬运机构。
背景技术
IC载板是桌面电脑、手提电脑、视听产品、数码摄像等电子产品的核心部件之一。IC载板板厂惯常采用拼板方式交货,一块板子上常有数十个甚至上百个单元板。为能配合加工生产线的自动化作业需要,在IC载板的每个加工工序完成后,通常需要放板机逐一将输送带输送过来的IC载板放置在各载具上,以便于将IC载板转运至其他设备上进行加工。但现有的放板机存在以下问题:当输送带上的IC载板的位置相对正放位置发生倾斜偏移时,放板机的机械手无法准确和有效地将IC载板搬运至载具上。若在输送带上设置用于顶推调整IC载板位置的调整机构,则可能对IC载板造成擦花等品质问题,严重影响IC载板的成品率。
发明内容
本发明的目的在于提供一种可对IC载板进行非接触式定位的非接触式寻边定位搬运机构。
为实现上述目的,本发明提供了一种非接触式寻边定位搬运机构,包括机架、输送机构、侧边寻边组件、前缘寻边组件、搬运机械手及电控系统,所述输送机构设置于所述机架上,所述输送机构用于输送具有工件正向位置或者工件偏移位置的IC载板;所述侧边寻边组件设置于所述机架上并位于所述输送机构的下方,所述侧边寻边组件用于识别定位所述IC载板的一侧边的第一点位置和第二点位置;所述前缘寻边组件设置于所述机架上并位于所述输送机构的下方,所述前缘寻边组件用于识别定位所述IC载板中与所述侧边相接的前边的第三点位置;所述搬运机械手设置于所述输送机构的上方,所述搬运机械手包括移动部、旋转部及搬运部,所述旋转部设置于所述移动部上,所述搬运部设置于所述旋转部上,所述搬运部具有搬运正向位置和搬运偏移位置,所述搬运正向位置与所述工件正向位置对应,所述搬运偏移位置与所述工件偏移位置对应;所述电控系统分别与所述侧边寻边组件、所述前缘寻边组件及所述搬运机械手电性连接,借由所述电控系统根据所述第一点位置、所述第二点位置及所述第三点位置计算得到所述IC载板的位置偏移信息,使得所述旋转部根据所述位置偏移信息驱动所述搬运部从所述搬运正向位置转动至所述搬运偏移位置。
较佳地,所述侧边寻边组件包括侧边寻边移动机构、第一感应器及第二感应器,所述侧边寻边移动机构设置于所述机架上,所述第一感应器和所述第二感应器分别设置于所述侧边寻边移动机构上,所述侧边寻边移动机构可驱动所述第一感应器和所述第二感应器移动,所述第一感应器用于识别定位所述第一点位置,所述第二感应器用于识别定位所述第二点位置。
较佳地,所述侧边寻边移动机构包括第一电机、第一丝杆、第一滑套及第一连接板,所述第一电机设置于所述机架上,所述第一电机的输出端与所述第一丝杆连接,所述第一滑套套设于所述第一丝杆上,所述第一滑套与所述第一连接板连接,所述第一感应器和所述第二感应器沿所述第一连接板的移动方向呈并排地设置于所述第一连接板上。
较佳地,所述机架上设有第一直线导轨,所述第一连接板连接于所述第一直线导轨上。
较佳地,所述前缘寻边组件包括前缘寻边移动机构及第三感应器,所述前缘寻边移动机构设置于所述机架上,所述第三感应器设置于所述前缘寻边移动机构上,所述前缘寻边移动机构可驱动所述第三感应器移动,所述第三感应器用于识别定位所述第三点位置。
较佳地,所述前缘寻边移动机构包括第二电机、第二丝杆、第二滑套及第二连接板,所述第二电机设置于所述机架上,所述第二电机的输出端与所述第二丝杆连接,所述第二滑套套设于所述第二丝杆上,所述第二滑套与所述第二连接板连接,所述第三感应器设置于所述第二连接板上。
较佳地,所述机架上设有第二直线导轨,所述第二连接板连接于所述第二直线导轨上。
较佳地,所述非接触式寻边定位搬运机构还包括承载件,所述承载件位于所述输送机构上,所述承载件用于承载所述IC载板。
较佳地,所述非接触式寻边定位搬运机构还包括上顶组件,上顶组件设置于所述机架上并位于所述承载件的下方,借由所述上顶组件将所述承载件顶起并脱离所述输送机构,以使所述搬运机械手搬运位于所述承载件上的所述IC载板。
较佳地,所述上顶组件包括上顶驱动机构及上顶件,所述上顶驱动机构设置于所述机架上,所述上顶驱动机构的输出端与所述上顶件连接并可驱动所述上顶件升降。
与现有技术相比,本发明的非接触式寻边定位搬运机构可通过侧边寻边组件识别定位IC载板的一侧边的第一点位置和第二点位置,通过前缘寻边组件识别定位IC载板中与侧边相接的前边的第三点位置,使得电控系统根据第一点位置、第二点位置及第三点位置计算得到IC载板的位置偏移信息,从而使得旋转部根据位置偏移信息驱动搬运部从搬运正向位置转动至搬运偏移位置,进而使得搬运部从与IC载板对应的搬运偏移位置吸取IC载板,在吸取IC载板板后,旋转部可驱动搬运部复位至搬运正向位置,从而将IC载板校正至工件正向位置,以保证搬运机械手每次均可将IC载板按照正向位置放置于对应的载具上。因此,本发明的非接触式寻边定位搬运机构通过对IC载板进行非接触式寻边定位,直接通过搬运机械手对IC载板进行吸取和校正位置,在保证每一工件都处于同一正向位置被放置于载具的同时,也可对IC载板进行保护,避免出现现有的对IC载板进行接触式调整而造成擦花等品质问题。
附图说明
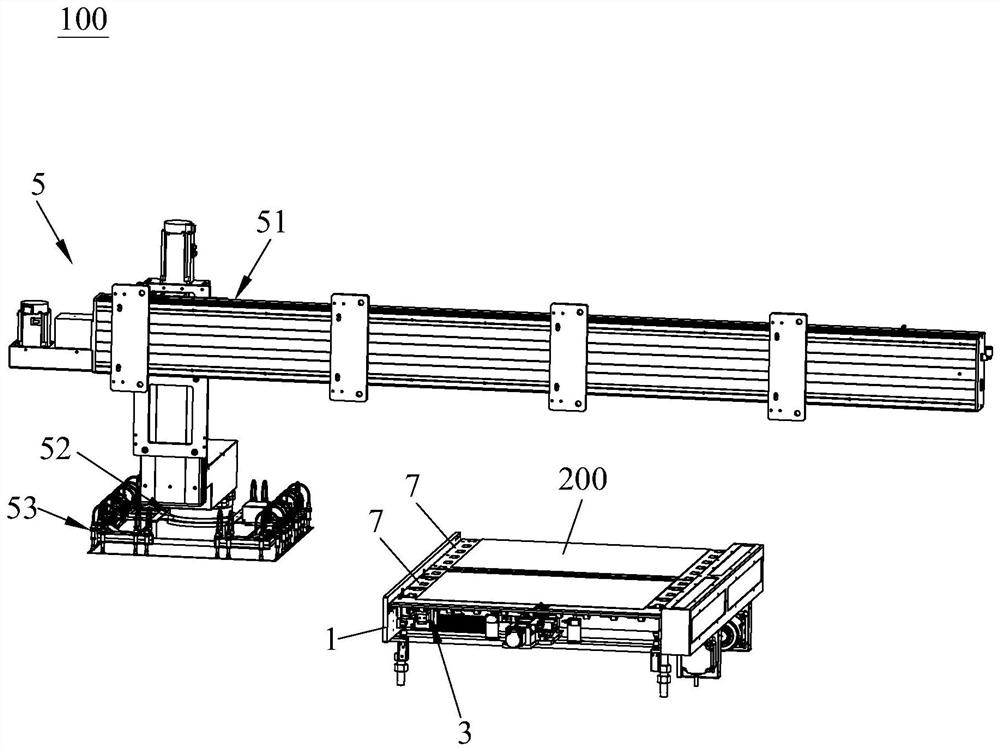
图1是本发明的非接触式寻边定位搬运机构的立体结构示意图。
图2是本发明的输送机构位置处的结构示意图。
图3是本发明的侧边寻边组件与前缘寻边组件的结构示意图。
图4是本发明的电控系统、侧边寻边组件、前缘寻边组件及搬运机械手四者电性连接的原理图。
图5是本发明的上顶组件的结构示意图。
具体实施方式
为了详细说明本发明的技术内容、构造特征,以下结合实施方式并配合附图作进一步说明。
请参阅图1至图4,本发明的非接触式寻边定位搬运机构100包括机架1、输送机构2、侧边寻边组件3、前缘寻边组件4、搬运机械手5及电控系统6。输送机构2设置于机架1上,输送机构2用于输送具有工件正向位置或者工件偏移位置的IC载板200。侧边寻边组件3设置于机架1上并位于输送机构2的下方,侧边寻边组件3用于识别定位IC载板200的一侧边的第一点位置和第二点位置。前缘寻边组件4设置于机架1上并位于输送机构2的下方,前缘寻边组件4用于识别定位IC载板200中与侧边相接的前边的第三点位置。搬运机械手5设置于输送机构2的上方,搬运机械手5包括移动部51、旋转部52及搬运部53,旋转部52设置于移动部51上,搬运部53设置于旋转部52上,搬运部53具有搬运正向位置和搬运偏移位置,搬运正向位置与工件正向位置对应,搬运偏移位置与工件偏移位置对应。移动部51、旋转部52及搬运部53的具体结构和原理为本领域技术人员所熟知,故在此不赘述。电控系统6分别与侧边寻边组件3、前缘寻边组件4及搬运机械手5电性连接,借由电控系统6根据第一点位置、第二点位置及第三点位置计算得到IC载板200的位置偏移信息,使得旋转部52根据位置偏移信息驱动搬运部53从搬运正向位置转动至搬运偏移位置。
请参阅图3,侧边寻边组件3包括侧边寻边移动机构31、第一感应器32及第二感应器33,侧边寻边移动机构31设置于机架1上,第一感应器32和第二感应器33分别设置于侧边寻边移动机构31上,侧边寻边移动机构31可驱动第一感应器32和第二感应器33移动,第一感应器32用于识别定位第一点位置,第二感应器33用于识别定位第二点位置。输送机构2沿第一感应器32的移动方向具有供第一感应器32识别定位的第一空间,输送机构2沿第二感应器33的移动方向具有供第二感应器33识别定位的第二空间。通过设置第一空间和第二空间,保证第一感应器32和第二感应器33均可识别定位位于输送机构2上的IC载板200。具体地,侧边寻边移动机构31包括第一电机311、第一丝杆312、第一滑套313及第一连接板314,第一电机311设置于机架1上,第一电机311的输出端与第一丝杆312连接,第一滑套313套设于第一丝杆312上,第一滑套313与第一连接板314连接,第一感应器32和第二感应器33沿第一连接板314的移动方向呈并排地设置于第一连接板314上。第一电机311可驱动第一丝杆312转动,从而驱使第一滑套313带动第一连接板314移动,进而带动第一感应器32和第二感应器33移动。通过驱动第一感应器32和第二感应器33移动,使得第一感应器32和第二感应器33先后识别定位IC载板200的第一点位置和第二点位置。但不以此为限,举例而言,侧边寻边组件3可分别采用两单独的驱动机构来单独驱动第一感应器32和第二感应器33移动,从而识别定位IC载板200的第一点位置和第二点位置。进一步地,机架1上设有第一直线导轨11,第一连接板314连接于第一直线导轨11上。第一直线导轨11可对第一连接板314起导向和承载作用。
请继续参阅图3,前缘寻边组件4包括前缘寻边移动机构41及第三感应器42,前缘寻边移动机构41设置于机架1上,第三感应器42设置于前缘寻边移动机构41上,前缘寻边移动机构41可驱动第三感应器42移动,第三感应器42用于识别定位第三点位置。第一感应器32、第二感应器33和第三感应器42三者不在同一直线上。具体地,前缘寻边移动机构41包括第二电机411、第二丝杆412、第二滑套413及第二连接板414,第二电机411设置于机架1上,第二电机411的输出端与第二丝杆412连接,第二滑套413套设于第二丝杆412上,第二滑套413与第二连接板414连接,第三感应器42设置于第二连接板414上。第二电机411可驱动第二丝杆412转动,从而驱使第二滑套413带动第二连接板414移动,进而带动第三感应器42移动,使得第三感应器42识别定位位于输送机构2上的IC载板200的第三点位置。进一步地,机架1上设有第二直线导轨12,第二连接板414连接于第二直线导轨12上。第二直线导轨12可对第二连接板414起导向和承载作用。
请参阅图2及图5,本发明的非接触式寻边定位搬运机构100还包括承载件7,承载件7位于输送机构2上,承载件7用于承载IC载板200。具体地,承载件7供第一感应器32识别定位的第一开口、供第二感应器33识别定位的第二开口以及供第三感应器42识别定位的第三开口,从而避免承载件7遮挡第一感应器32、第二感应器33以及第三感应器42。进一步地,本发明的非接触式寻边定位搬运机构100还包括上顶组件8,上顶组件8设置于机架1上并位于承载件7的下方,借由上顶组件8将承载件7顶起并脱离输送机构2,以使搬运机械手5搬运位于承载件7上的IC载板200。具体地,上顶组件8的数量有四个,四个上顶组件8分别对承载件7的四角进行顶起,但不以此为限。更具体地,上顶组件8包括上顶驱动机构81及上顶件82,上顶驱动机构81设置于机架1上,上顶驱动机构81的输出端与上顶件82连接并可驱动上顶件82升降。通过上顶驱动机构81驱动上顶件82上升,使得上顶件82将承载件7顶起并脱离输送机构2,以使搬运机械手5搬运位于承载件7上的IC载板200。上顶驱动机构81可采用现有的伸缩气缸,但不以此为限。
结合图1至图5,本发明的非接触式寻边定位搬运机构100的具体工作原理如下:
侧边寻边组件3的侧边寻边移动机构31驱动第一感应器32和第二感应器33移动,使得第一感应器32识别定位位于输送机构2上的IC载板200的侧边的第一点位置,第二感应器33识别定位位于输送机构2上的IC载板200的同一侧边的第二点位置;前缘寻边组件4的前缘寻边移动机构41驱动第三感应器42,使得第三感应器42识别定位IC载板200中与该侧边相接的前边的第三点位置。电控系统6根据第一点位置、第二点位置及第三点位置计算得到IC载板200的位置偏移信息,使得搬运机械手5的旋转部52根据位置偏移信息驱动搬运部53从搬运正向位置转动至搬运偏移位置,使得搬运部53从与IC载板200对应的搬运偏移位置吸取IC载板200,在吸取IC载板200板后,旋转部52可驱动搬运部53复位至搬运正向位置,从而将IC载板200校正至工件正向位置,以保证搬运机械手5每次均可将IC载板200按照正向位置放置于对应的载具上。
综上,本发明的非接触式寻边定位搬运机构100通过对IC载板200进行非接触式寻边定位,直接通过搬运机械手5来对IC载板200进行吸取和校正位置,在保证每一工件都处于同一正向位置被放置于载具的同时,也可对IC载板200进行保护,避免出现现有的对IC载板200进行接触式调整而造成擦花等品质问题。
以上所揭露的仅为本发明的较佳实例而已,不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,均属于本发明所涵盖的范围。
- IC载板加工用非接触式寻边定位搬运机构
- 非接触式寻边定位搬运机构