测量设备和测量目标的方法
文献发布时间:2023-06-19 10:14:56
相关申请的交叉引用
本申请要求于2018年5月31日递交的欧洲申请18175297.3的优先权,所述欧洲申请的全部内容通过引用合并入本文中。
技术领域
本说明书涉及测量设备和测量目标的方法,其例如能够用于在涉及光刻的制造过程中执行量测测量的情境中。
背景技术
光刻设备是将期望的图案施加至衬底上(通常施加至所述衬底的目标部分上)的机器。光刻设备可以用于例如集成电路(IC)或被设计成功能性的其它器件的制造中。在那种情况下,图案形成装置(替代地被称作掩模或掩模版)可以用于产生待形成于被设计成功能性的器件的单个层上的电路图案。可以将这种图案转印至衬底(例如硅晶片)上的目标部分(例如包括管芯的部分、一个管芯或若干管芯)上。典型地经由成像至设置于所述衬底上的辐射敏感材料(抗蚀剂)层上来进行所述图案的转印。通常,单个衬底将包含被连续地图案化的相邻目标部分的网络。已知光刻设备包括:所谓的步进器,其中通过一次性将整个图案曝光至目标部分上来照射每个目标部分;和所谓的扫瞄器,其中通过在给定方向(“扫描”方向)上经由辐射束来扫描所述图案的同时平行于或反向平行于此方向来同步地扫描所述衬底,来照射每个目标部分。也可能通过将所述图案压印至所述衬底上来将所述图案从所述图案形成装置转印至所述衬底。
制造诸如半导体器件之类的器件典型地涉及使用一定数目的制作过程来处理衬底(例如半导体晶片)以形成所述器件的各个特征且常常形成多个层。典型地使用例如沉积、光刻、蚀刻、化学机械抛光和离子注入来制造和处理这些层和/或特征。可以在衬底上的多个管芯上制作多个器件,并且接着将所述多个器件分离成单独的器件。这种器件制造过程可以被认为是图案化过程。图案化过程涉及图案转印步骤,诸如使用光刻设备的光学和/或纳米压印光刻术,以在衬底上提供图案且典型地但可选地涉及一个或更多个相关的图案处理步骤,诸如由显影设备进行的抗蚀剂显影、使用焙烤工具焙烤所述衬底、由蚀刻设备进行的蚀刻所述图案等。另外,在所述图案化过程中涉及一个或更多个量测过程。
在图案化过程期间在各个步骤处使用量测过程以监控和/或控制所述过程。例如,量测过程用以测量衬底的一个或更多个特性,诸如在所述图案化过程期间形成于所述衬底上的特征的相对定位(例如对准即配准、重叠、对准等)或尺寸(例如线宽、临界尺寸(CD)、厚度等),使得例如可以根据所述一个或更多个特性确定所述图案化过程的性能。如果一个或更多个特性是不可接受的(例如在所述特性的预定范围之外),则可以例如基于所述一个或更多个特性的测量结果来设计或变更所述图案化过程的一个或更多个变量,使得由所述图案化过程制造的衬底具有可接受的特性。
数十年来,随着光刻术和其它图案化过程技术的改进,功能性元件的尺寸已持续地减小,而每器件的功能性元件(诸如晶体管)的量已稳步地增加。同时,对在重叠、临界尺寸(CD)等方面的准确度的要求已变得越来越严格。将在所述图案化过程中不可避免地产生误差,诸如重叠中的误差、CD中的误差,等等。例如,可以由于光学像差、图案形成装置加热、图案形成装置误差和/或衬底加热而产生成像误差,并且可以依据例如重叠、CD等来表征所述成像误差。另外地或替代地,可以在所述图案化过程的其它部分中(诸如在蚀刻、显影、焙烤等中)引入误差,并且类似地,可以依据例如重叠、CD等来表征所述误差。所述误差可能造成在器件的功能实施方面的问题,包括器件功能实施的故障,或功能器件的一个或更多个电气问题。因此,期望能够表征一个或更多个这些误差且采取步骤来对于图案化过程进行设计、修改、控制等以减小或最小化这些误差中的一个或更多个误差。
发明内容
根据一方面,提供一种测量设备,包括:光学系统,所述光学系统被配置成利用辐射来照射目标和将反射辐射从目标引导到传感器;以及可编程的空间光调制器,位于所述光学系统的光瞳平面中,所述空间光调制器被编程为重定向多个光瞳平面区域中的每个光瞳平面区域中的光,从而在所述传感器上的不同部位处形成对应的多个图像,每个图像由穿过不同的对应的一个光瞳平面区域的辐射形成。
根据一方面,提供一种测量目标的方法,包括:利用辐射照射所述目标,且在传感器上检测来自目标的反射辐射;使用可编程的空间光调制器来重定向光瞳平面中的多个光瞳平面区域中的每个光瞳平面区域中的光,以在传感器上的不同部位处形成相对的多个图像,每个图像由穿过所述多个光瞳平面区域中的不同的对应的一个光瞳平面区域的辐射形成。
附图说明
现在将参考随附附图仅作为示例来描述实施例,在所述附图中:
图1示意性地描绘光刻设备的实施例;
图2示意性地描绘光刻单元或光刻簇的实施例;
图3A是用于根据实施例的使用提供某些照射模式的第一对照射孔来测量目标的测量设备的示意图;
图3B是针对给定照射方向的目标的衍射光谱的示意性细节;
图3C是在将测量设备用于基于衍射的重叠测量时提供另外的照射模式的第二对照射孔的示意性图示;
图3D是在使用测量设备以用于基于衍射的重叠测量时将第一和第二对孔进行组合的提供另外的照射模式的第三对照射孔的示意性示图;
图4示意性地描绘在衬底上的测量斑的轮廓和多周期性结构(例如多光栅)目标的形式;
图5示意性地描绘图3的设备中获得的图4的目标的图像;
图6示意性地描绘了在光瞳平面中具有楔形光学元件的测量设备的光学系统;
图7示意性地描绘了在光瞳平面中具有SLM的测量设备的光学系统;
图8描绘了多个光瞳平面区域的示例;
图9描绘了多个光瞳平面区域的另一示例;以及
图10描绘了在传感器上不同的对应的一个区域中所形成的所模拟的多组图像,并且经由光瞳平面中的SLM对它们施加了不同的光学校正。
具体实施方式
在详细地描述实施例之前,呈现可供实施多个实施例的示例环境是有指导性的。
图1示意性地描绘光刻设备LA。所述设备包括:
-照射系统(照射器)IL,所述照射系统被配置成调节辐射束B(例如UV辐射或DUV辐射);
-支撑结构(例如掩模台)MT,所述支撑结构被构造成支撑图案形成装置(例如掩模)MA,并且连接至被配置成根据某些参数来准确地定位所述图案形成装置的第一定位器PM;
-衬底台(例如晶片台)WT,所述衬底台被构造成保持衬底(例如涂覆有抗蚀剂的晶片)W且连接至被配置成根据某些参数来准确地定位所述衬底的第二定位器PW;和
-投影系统(例如折射投影透镜系统)PS,所述投影系统被配置成将由图案形成装置MA赋予至辐射束B的图案投影至衬底W的目标部分C(例如包括一个或更多个管芯)上,所述投影系统被支撑在参考框架(RF)上。
照射系统可以包括用于引导、成形或控制辐射的各种类型的光学部件,诸如折射型、反射型、磁性型、电磁型、静电型或其它类型的光学部件,或其任何组合。
支撑结构以取决于图案形成装置的方向、光刻设备的设计和其它条件(诸如图案形成装置是否被保持在真空环境中)的方式来支撑图案形成装置。支撑结构可以使用机械、真空、静电或其它夹持技术以保持图案形成装置。支撑结构可以是例如框架或台,其可以根据需要而是固定的或可移动的。支撑结构可以确保图案形成装置例如相对于投影系统处于期望的位置。可以认为本文中对术语“掩模版”或“掩模”的任何使用都与更上位的术语“图案形成装置”同义。
本文中所使用的术语“图案形成装置”应被广泛地解释为是指可以用于在衬底的目标部分中赋予图案的任何装置。在实施例中,图案形成装置是可以用于在辐射束的横截面中向辐射束赋予图案以便在衬底的目标部分中创建图案的任何装置。应注意,例如,如果被赋予至辐射束的图案包括相移特征或所谓的辅助特征,则所述图案可以不确切地对应于衬底的目标部分中的期望的图案。通常,被赋予至辐射束的图案将对应于目标部分中所创建的器件(诸如集成电路)中的特定功能层。
图案形成装置可以是透射型的或反射型的。图案形成装置的示例包括掩模、可编程反射镜阵列和可编程LCD面板。掩模在光刻术中是众所周知的,并且包括诸如二元、交替相移和衰减相移的掩模类型,以及各种混合式掩模类型。可编程反射镜阵列的示例使用小反射镜的矩阵布置,所述小反射镜中的每个小反射镜可以被单独地倾斜,以便在不同方向上对入射辐射束进行反射。倾斜的反射镜在由反射镜矩阵反射的辐射束中赋予图案。
本文中所使用的术语“投影系统”应被广泛地解释为涵盖适于所使用的曝光辐射、或适于诸如浸没液体的使用或真空的使用之类的其它因素的任何类型的投影系统,包括折射型、反射型、反射折射型、磁性型、电磁型和静电型光学系统,或其任何组合。可以认为本文中对术语“投影透镜”的任何使用都与更上位的术语“投影系统”同义。
投影系统PS具有可以是非均一的且可能影响成像到衬底W上的图案的光学传递函数。对于非偏振辐射,这些效应可以由两个纯量映射或标量图相当良好地描述,所述两个标量图描述了作为所述投影系统PS的光瞳平面中的位置的函数的射出所述投影系统PS的辐射的透射(变迹)和相对相位(像差)。可以将可以被称作透射映射和相对相位映射的这些标量图表达为基底函数的完整集合的线性组合。特别方便的集合是泽尼克多项式,所述泽尼克多项式形成了在单位圆上定义的正交多项式的集合。每个标量图的确定可以涉及确定在这种展开式中的系数。由于泽尼克多项式在单位圆上正交,因此可以通过依次计算所测量的标量图与每个泽尼克多项式的内积、并且将这种内积除以所述泽尼克多项式的范数的平方,来确定泽尼克系数。
透射映射和相对相位映射取决于场和系统。即,通常,每个投影系统PS将针对每个场点(即,针对投影系统PS的像平面中的每个空间部位)具有不同的泽尼克展开式。可以通过将辐射(例如)从投影系统PS的物平面(即,图案形成装置MA的平面)中的点状源投影通过所述投影系统PS且使用剪切干涉仪以测量波前(即,具有相同相位的点的轨迹)来确定投影系统PS在其光瞳平面中的相对相位。剪切干涉仪是共同路径干涉仪,因此,有利地,无需次级参考束来测量波前。剪切干涉仪可以包括:衍射光栅,例如,在投影系统的像平面(即,衬底台WT)中的二维栅格;和检测器,所述检测器被布置成检测与投影系统PS的光瞳平面共轭的平面中的干涉图案。干涉图案是与辐射的相位的相对于在剪切方向上在光瞳平面中的坐标的导数相关的。检测器可以包括感测元件的阵列,诸如电荷耦合器件(CCD)。
光刻设备的投影系统PS可以不产生可见的条纹,且因此,可以使用相位步进技术(诸如例如移动所述衍射光栅)来增强波前确定的准确度。可以在所述衍射光栅的平面中和在与测量的扫描方向垂直的方向上执行步进。步进范围可以是一个光栅周期,并且可以使用至少三个(均一地分布的)相位步进。因而,例如,可以在y方向上执行三次扫描测量,每次扫描测量针对在x方向上的不同位置来执行。衍射光栅的这种步进将相位变化有效地转换成强度变化,从而允许确定相位信息。所述光栅可以在与衍射光栅垂直的方向(z方向)上步进以校准所述检测器。
可以通过将辐射(例如)从投影系统PS的物平面(即,图案形成装置MA的平面)中的点状源投影通过所述投影系统PS、且使用检测器来测量与投影系统PS的光瞳平面共轭的平面中的辐射的强度,来确定投影系统PS在其光瞳平面中的透射(变迹)。可以使用与用于测量波前以确定像差的检测器同一个检测器。
投影系统PS可以包括多个光学(例如,透镜)元件且还可以包括调整机构AM,所述调整机构被配置成调整所述光学元件中的一个或更多个光学元件以便校正像差(跨越整个场的光瞳平面的相位变化)。为了实现这种校正,调整机构可以是可操作的从而以一种或更多种不同的方式操控所述投影系统PS内的一个或更多个光学(例如,透镜)元件。投影系统可以具有一坐标系,其中其光轴在z方向上延伸。所述调整机构可以是可操作的以进行以下各项的任何组合:使一个或更多个光学元件移位;使一个或更多个光学元件倾斜;和/或使一个或更多个光学元件变形。光学元件的移位可以在任何方向(x、y、z或其组合)上进行。光学元件的倾斜典型地是通过围绕在x和/或y方向上的轴线旋转来从垂直于光轴的平面偏离,但对于非旋转对称的非球面光学元件,可以使用围绕z轴的旋转。光学元件的变形可以包括低频形状(例如,像散)和/或高频形状(例如,自由形式非球面)。可以例如通过使用一个或更多个致动器以对光学元件的一个或更多个侧施加力、和/或通过使用一个或更多个加热元件以加热光学元件的一个或更多个选定区,来执行光学元件的变形。通常,不可能调整投影系统PS来校正变迹(即,跨越所述光瞳平面的透射变化)。可以当设计用于所述光刻设备LA的图案形成装置(例如,掩模)MA时使用投影系统PS的透射映射。使用计算光刻技术,图案形成装置MA可以被设计为用于至少部分地校正变迹。
如这里所描绘的,所述设备属于透射类型(例如,使用透射型掩模)。替代地,所述设备可以属于反射类型(例如,使用上文提及的类型的可编程反射镜阵列,或使用反射型掩模)。
光刻设备可以属于具有两个(双平台)或更多个台(例如,两个或更多个衬底台WTa、WTb,两个或更多个图案形成装置台,在没有专用于例如促成测量和/或清洁等的衬底的情况下在投影系统下方的衬底台WTa和台WTb)的类型。在这些“多平台”机器中,可能并行地使用额外的台,或可以在一个或更多个台上进行预备步骤的同时将一个或更多个其它台用于曝光。例如,可以进行使用对准传感器AS的对准测量和/或使用水平传感器LS的水平(高度、倾角等)测量。
光刻设备也可以属于如下类型:其中衬底的至少一部分可以由具有相对高折射率的液体(例如,水)覆盖,以便填充介于投影系统与衬底之间的空间。也可以将浸没液体施加至所述光刻设备中的其它空间,例如,介于图案形成装置与投影系统之间的空间。浸没技术在本领域中被众所周知地用于增大投影系统的数值孔径。如本文中所使用的术语“浸没”不意味着诸如衬底之类的结构必须浸没在液体中,而是仅意味着液体在曝光期间位于投影系统与衬底之间。
参考图1,照射器IL接收来自辐射源SO的辐射束。例如,当源是准分子激光器时,源和光刻设备可以是分离的实体。在这些情况下,不认为所述源形成光刻设备的部分,并且辐射束借助于包括例如合适的定向反射镜和/或扩束器的束传递系统BD从源SO传递至照射器IL。在其它情况下,例如,当源为汞灯时,源可以是光刻设备的组成部分。源SO和照射器IL连同束传递系统BD(在需要时)可以被称作辐射系统。
照射器IL可以包括被配置成调整辐射束的角强度分布的调整器AD。通常,可以调整照射器的光瞳平面中的强度分布的至少外部径向范围和/或内部径向范围(通常分别被称作σ-外部和-σ内部)。另外,照射器IL可以包括各种其它部件,诸如积分器IN和聚光器CO。照射器可以用于调节辐射束,以在其横截面中具有期望的均一性和强度分布。
辐射束B入射到被保持在支撑结构(例如,掩模台)MT上的图案形成装置(例如,掩模)MA上,并且由所述图案化器件图案化。在已穿越所述图案形成装置MA的情况下,辐射束B传递通过投影系统PS,投影系统PS将所述束聚焦至衬底W的目标部分C上。借助于第二定位装置PW和位置传感器IF(例如,干涉装置、线性编码器、2-D编码器或电容性传感器),可以准确地移动衬底台WT,例如,以便将不同的目标部分C定位在辐射束B的路径中。类似地,第一定位器PM和另一位置传感器(其在图1中未明确地描绘)可以用于例如在从掩模库的机械获取之后、或在扫描期间相对于辐射束B的路径来准确地定位所述图案形成装置MA。通常,可以借助于形成第一定位器PM的部分的长行程模块(粗定位)和短行程模块(精定位)来实现支撑结构MT的移动。类似地,可以使用形成第二定位器PW的部分的长行程模块和短行程模块来实现衬底台WT的移动。在步进器(相对于扫瞄器)的情况下,支撑结构MT可以仅连接至短行程致动器,或可以是固定的。可以使用图案形成装置对准标记M1、M2和衬底对准标记P1、P2来对准图案形成装置MA和衬底W。尽管如所图示的衬底对准标记占据专用的目标部分,但所述衬底对准标记可以位于目标部分之间的空间中(这些标记被称为划线对准标记)。类似地,在多于一个管芯被设置于图案形成装置MA上的情形中,图案形成装置对准标记可以位于所述管芯之间。
所描绘的设备可以用于以下模式中的至少一种模式中:
1.在步进模式中,在将被赋予至辐射束的整个图案一次性投影至目标部分C上的同时,使支撑结构MT和衬底台WT保持基本上静止(即,单次静态曝光)。接着,使衬底台WT在X和/或Y方向上移位,使得可以曝光不同的目标部分C。在步进模式中,曝光场的最大大小限制了在单次静态曝光中成像的目标部分C的大小。
2.在扫描模式中,在将被赋予至辐射束的图案投影至目标部分C上的同时,同步地扫描支撑结构MT和衬底台WT(即,单次动态曝光)。可以由投影系统PS的放大率(缩小率)和图像反转特性来确定衬底台WT相对于支撑结构MT的速度和方向。在扫描模式中,曝光场的最大大小限制了在单次动态曝光中的目标部分的宽度(在非扫描方向上),而扫描运动的长度确定了目标部分的高度(在扫描方向上)。
3.在另一模式中,在将被赋予至辐射束的图案投影至目标部分C上时,使支撑结构MT保持基本上静止,从而保持可编程图案形成装置,并且移动或扫描衬底台WT。在这种模式中,通常使用脉冲式辐射源,并且在衬底台WT的每次移动之后或在扫描期间的连续辐射脉冲之间根据需要来更新可编程图案形成装置。这种操作模式可以易于被应用至利用可编程图案形成装置(诸如上文提及的类型的可编程反射镜阵列)的无掩模光刻术。
也可以使用对上文描述的使用模式的组合和/或变化或完全不同的使用模式。
如图2所示出的,光刻设备LA可以形成光刻单元LC(有时也被称作光刻元或光刻簇)的部分,光刻单元LC也包括用于对衬底执行曝光前过程和曝光后过程的设备。通常,这些设备包括用于沉积一个或更多个抗蚀剂层的一个或更多个旋涂器SC、用于显影曝光后的抗蚀剂的一个或更多个显影器DE、一个或更多个激冷板CH和/或一个或更多个焙烤板BK。衬底输送装置或机器人RO从输入端口I/O1、输出端口I/O2拾取一个或更多个衬底,在不同的过程设备之间移动这些衬底、且将它们传递至光刻设备的进料台LB。常常被统称为涂覆显影系统或轨道(track)的这些设备处于涂覆显影系统控制单元或轨道控制单元TCU的控制下,涂覆显影系统控制单元或轨道控制单元TCU自身受管理控制系统SCS控制,管理控制系统SCS也经由光刻控制单元LACU来控制光刻设备。因此,不同的设备可以被操作以最大化吞吐量和处理效率。
为了正确地且一致地曝光由光刻设备曝光的衬底,需要检查曝光的衬底以测量或确定一个或更多个属性,诸如重叠(其可以例如在叠置层中的结构之间,或在同一层中的已由例如双重图案化过程分别提供至所述层的结构之间)、线厚度、临界尺寸(CD)、聚焦偏移、材料属性等。因此,其中定位有光刻元LC的制造设施也典型地包括量测系统MET,量测系统MET接收已在所述光刻元中被处理的衬底W中的一些或全部衬底。测量系统MET可以是光刻元LC的部分,例如,其可以是所述光刻设备LA的部分。
可以将量测结果直接或间接地提供至管理控制系统SCS。如果检测到误差,则可以对后续衬底的曝光(尤其在若干可以足够迅速且快速完成检查使得所述批量的一个或更多个其它衬底仍待曝光的情况下)和/或对曝光的衬底的后续曝光进行调整。此外,已被曝光的衬底可以被剥离和返工以改善良率,或被舍弃,由此避免对已知有缺陷的衬底执行进一步处理。在衬底的仅一些目标部分有缺陷的情况下,可以仅对良好的那些目标部分执行另外的曝光。
在量测系统MET内,量测设备用于确定衬底的一个或更多个属性,并且特别是确定不同衬底的一个或更多个属性如何变化或同一衬底的不同层在不同层间如何变化。量测设备可以被集成至光刻设备LA或光刻元LC中,或可以是单独的装置。为了实现快速测量,期望使量测设备紧接在曝光之后测量曝光后的抗蚀剂层的一个或更多个属性。然而,抗蚀剂中的潜像具有低对比度(即,在已曝光至辐射的抗蚀剂的部分与尚未曝光至辐射的抗蚀剂的部分之间仅存在非常小的折射率差),且不是所有量测设备都具有足够的灵敏度以进行潜像的有用测量。因此,可以在曝光后焙烤步骤(PEB)之后进行测量,曝光后焙烤步骤通常是对曝光后的衬底进行的第一步骤且增加了抗蚀剂的曝光部分与未曝光的部分之间的对比度。在这个阶段,抗蚀剂中的图像可以被称为半潜像。也可能对显影后的抗蚀剂图像进行测量(这时,抗蚀剂的曝光部分或未曝光的部分已被移除),或在诸如蚀刻的图案转印步骤之后对显影后的抗蚀剂图像进行测量。后一可能性限制了对有缺陷衬底进行返工的可能性,但仍可以提供有用的信息。
为了实现量测,可以将一个或更多个目标设置于衬底上。在实施例中,目标被专门设计且可以包括周期性结构。在实施例中,目标是器件图案的一部分,例如是器件图案的周期性结构。在实施例中,器件图案是存储器装置的周期性结构(例如,双极晶体管(BPT)、位线接点(BLC)等结构)。
在实施例中,衬底上的目标可以包括一个或更多个1-D周期性结构(例如,光栅),其被印制成使得在显影之后,所述周期性结构特征由实体抗蚀剂线形成。在实施例中,所述目标可以包括一个或更多个2-D周期性结构(例如,光栅),其被印制成使得在显影之后,所述一个或更多个周期性结构由抗蚀剂中的实体抗蚀剂导柱或通孔形成。栅条、导柱或通孔可被可替代地被蚀刻至衬底中(例如,被蚀刻至衬底上的一个或更多个层中)。
在实施例中,图案化过程的所关注的参数中的一个参数是重叠。可以使用暗场散射量测术来测量重叠,其中阻挡了零衍射阶(对应于镜面反射),并且仅处理较高阶。可以在PCT专利申请公开号WO2009/078708和公开号WO 2009/106279中发现暗场量测的示例,所述专利申请公开的全文由此以引用方式并入。美国专利申请公开US2011-0027704、US2011-0043791和US2012-0242970中已描述所述技术的进一步开发,所述专利申请公开的全文由此以引用方式并入。使用衍射阶的暗场检测的基于衍射的重叠能够实现对较小目标的重叠测量。这些目标可以小于照射斑且可以由衬底上的器件产品结构环绕。在实施例中,可以在一次辐射捕获中测量多个目标。
图3A中示意性地示出适合用于实施例中以对(例如)重叠进行测量的量测设备。图3B中更详细地图示目标T(包括诸如光栅之类的周期性结构)和衍射射线。量测设备可以是单独的装置,或被并入(例如)测量站处的所述光刻设备LA中,或被并入所述光刻单元LC中。在整个所述设备中具有若干分支的光轴由虚线O表示。在这个设备中,由输出11(例如,诸如激光器或氙气灯之类的源,或连接至源的开口)发射的辐射由包括透镜12、14和物镜16的光学系统经由棱镜15而引导至衬底W上。这些透镜被布置成4F布置的双重序列。可以使用不同的透镜布置,只要所述透镜布置仍将衬底图像提供至检测器上。
在实施例中,透镜布置允许访问即通往中间光瞳平面以用于空间-频率滤光。因此,可以通过在呈现衬底平面的空间光谱的平面(这里被称作(共轭)光瞳平面)中限定空间强度分布来选择所述辐射入射到所述衬底上的角度范围。特别地,可以例如通过在作为物镜光瞳平面的背向投影式图像的平面中在透镜12与14之间插入合适形式的孔板13来进行这种选择。在所图示示例中,孔板13具有不同的形式(被标注为13N和13S),从而允许选择不同的照射模式。本示例中的照射系统形成离轴照射模式。在第一照射模式中,孔板13N提供来自仅出于描述起见而被指定为“北”的方向的离轴照射。在第二照射模式中,孔板13S用于提供类似的照射,但类似的照射来自被标注为“南”的相反的方向。通过使用不同孔,其它照射模式是可能的。例如,可设置替代孔板,其中在两个相反象限中阻挡辐射并且允许辐射在另外两个相反象限中穿过,由此提供下文所提及的在图6中所描绘的照射图案60。光瞳平面的其余部分期望地是暗的,这是因为期望的照射模式之外的任何不必要辐射可干涉期望的测量信号。
如图3B中所示出的,目标T被放置为使得衬底W大体上垂直于物镜16的光轴O。与轴线O成角度而照射于目标T上的照射射线I引起一个零阶射线(实线0)和两个一阶射线(点划线+1和双点划线-1)。在利用过填充的小目标T的情况下,这些射线是覆盖包括量测目标T和其它特征的衬底区域的许多平行射线中的仅一条射线。由于板13中的孔具有有限的宽度(即,该有限的宽度是用以准许有用量的辐射进入所必需的),则入射射线I将实际上将占据一角度范围,并且衍射射线0和+1/-1将稍微散开。根据小目标的点扩散函数,每个阶+1和-1将在一定角度范围上进一步展开,而不是如所示出的单条理想射线。应注意,周期性结构间距和照射角度可以被设计或被调整成使得进入所述物镜的一阶射线与中心光轴紧密地对准。图3A和图3B中所图示的射线被示出为稍微离轴,仅能够使它们在图中被更容易地区分。由衬底W上的所述目标衍射的至少0阶和+1阶由物镜16收集,并且被往回引导通过棱镜15。
返回至图3A,通过指定被标注为北(N)和南(S)的完全相反的孔来图示第一照射模式和第二照射模式两者。当入射射线I来自所述光轴的北侧时,即,当使用孔板13N来应用所述第一照射模式时,被标注为+1(N)的+1衍射射线进入所述物镜16。与此对比,当使用孔板13S来应用所述第二照射模式时,-1衍射射线(被标注为-1(S))是进入所述透镜16的衍射射线。因而,在实施例中,通过在某些条件下测量所述目标两次(例如,在使所述目标旋转或改变所述照射模式或改变成像模式以分离地获得-1衍射阶强度和+1衍射阶强度之后)来获得测量结果。针对给定目标来比较这些强度会提供所述目标中的不对称性的测量结果,并且所述目标中的不对称性可以用作光刻过程的参数(例如,重叠)的指标。在上文描述的情形下,改变所述照射模式。
分束器17将衍射束划分成两个测量分支。在第一测量分支中,光学系统18使用零阶衍射束和一阶衍射束来在第一传感器19(例如,CCD或CMOS传感器)上形成所述目标的衍射光谱(光瞳平面图像)。每个衍射阶射中传感器上的不同点,使得图像处理可以比较和对比多个阶。由传感器19捕获的所述光瞳平面图像可以用于聚焦所述量测设备和/或对强度测量结果进行归一化。所述光瞳平面图像也可以用于诸如重构之类的其它测量目的,如下文进一步描述的。
在第二测量分支中,光学系统20、22在传感器23(例如,CCD或CMOS传感器)上形成所述衬底W上的所述目标的图像。在第二测量分支中,将孔径光阑21设置于与物镜16的光瞳平面共轭的平面中。孔径光阑21用于阻挡零阶衍射束,使得形成在传感器23上的所述目标的所述图像由-1或+1阶束形成。与由传感器19和23测量的图像有关的数据被输出至处理器和控制器PU,处理器和控制器PU的功能将取决于正被执行的测量的特定类型。应注意,这里在广义上使用术语“图像”。只要存在-1阶和+1阶中的一个阶,就将不形成如此的周期性结构特征(例如,光栅线)的图像。
图3中所示出的孔板13和光阑21的特定形式仅是示例。在另一实施例中,使用所述目标的同轴照射,并且使用具有离轴孔的孔径光阑以将大体上仅一个一阶衍射辐射传递至所述传感器。在又一其它实施例中,代替一阶束或除了一阶束以外,二阶束、三阶束和更高阶束(图3中未图示)也可以用于测量中。
为了使照射能够适应于这些不同类型的测量,孔板13可以包括围绕圆盘而形成的一定数目的孔图案,所述圆盘旋转以使期望的图案处于适当位置。应注意,使用孔板13N或13S来测量在一个方向(X或Y方向,取决于设置)上定向的目标的周期性结构。为了测量正交周期性结构,可以实施达90°和270°的所述目标的旋转。图3C和图3D中示出不同的孔板。图3C图示离轴照射模式的两种另外的类型。在图3C的第一照射模式中,孔板13E提供来自仅出于描述起见而相对于先前描述的“北”指定为“东”的方向的离轴照射。在图3C的第二照射模式中,孔板13W用于提供类似的但来自被标注为“西”的相反方向的照射。图3D图示离轴照射模式的两种另外的类型。在图3D的第一照射模式中,孔板13NW提供来自被指定为如先前描述的“北”和“西”的方向的离轴照射。在第二照射模式中,孔板13SE用于提供类似的但来自被标注为如先前描述的“南”和“东”的相反方向的照射。例如,上文提及的先前公布的专利申请公开中描述了所述设备的这些和众多其它变型和应用的使用。
图4描绘了形成在衬底上的示例复合量测目标T。所述复合目标包括紧密地定位在一起的四个周期性结构(在这种情况下,为光栅)32、33、34、35。在实施例中,可以使周期性结构布局小于测量斑(即,所述周期性结构布局被过填充)。因而,在实施例中,周期性结构足够紧密地定位在一起,使得它们都在由所述量测设备的所述照射束形成的测量斑31内。在所述情况下,所述四个周期性结构因而都被同时地照射且同时地成像到传感器19和23上。在专用于重叠测量的示例中,周期性结构32、33、34、35自身是由重叠周期性结构而形成的复合周期性结构(例如,复合光栅),即,周期性结构在形成于衬底W上的所述器件的不同层中被图案化且使得一个层中的至少一个周期性结构与不同层中的至少一个周期性结构重叠。这种目标可以具有在20μm×20μm内或在16μm×16μm内的外部尺寸。另外,所有周期性结构用于测量特定一对的层之间的重叠。为了促成目标能够测量多于单对的层,周期性结构32、33、34、35可以具有被不同偏置的重叠偏移,以便促成在其中形成有复合周期性结构的不同部分的不同层之间的重叠的测量。因而,用于所述衬底上的所述目标的所有周期性结构将会用于测量一对层,并且用于所述衬底上的另一相同目标的所有周期性结构将会用于测量另一对层,其中不同的偏置促成在所述层对之间进行区分。
返回至图4,周期性结构32、33、34、35也可以在它们的方向方面不同(如所示出的),以便在X和Y方向上衍射入射辐射。在一个示例中,周期性结构32和34是分别具有+d、-d的偏置的X方向周期性结构。周期性结构33和35可以是分别具有偏移+d和-d的Y方向周期性结构。虽然图示四个周期性结构,但另一实施例可以包括较大的矩阵以获得期望的准确度。例如,九个复合周期性结构的3×3阵列可以具有偏置-4d、-3d、-2d、-d、0、+d、+2d、+3d、+4d。可以在由传感器23捕获的图像中识别这些周期性结构的单独的图像。
图5示出在使用来自图3D的孔板13NW或13SE的情况下在图3的设备中使用图4的目标而可以形成在传感器23上且由传感器23检测的图像的示例。虽然传感器19不能分辨不同的单独的周期性结构32至35,但传感器23可以分辨不同的单独的周期性结构32至35。暗矩形表示所述传感器上的所述图像的场,在所述场内,衬底上的照射斑31被成像至对应的圆形区域41中。在所述场内,矩形区域42至45表示所述周期性结构32至35的图像。在未定位在划线中的情况或除了定位在划线中以外的情况下,所述目标也可以定位在器件产品特征之中。如果周期性结构位于器件产品区域中,则这种图像场的周边中也能够看见器件特征。处理器和控制器PU使用图案识别来处理这些图像,以识别周期性结构32至35的单独的图像42至45。以这种方式,所述图像不必须在所述传感器框架内的特定部位处非常精确地对准,这极大地改善所述测量设备整体上的生产量。
一旦已识别所述周期性结构的单独的图像,则可以例如通过对所识别的区域内的选定像素强度值进行平均化或求和来测量那些单独的图像的强度。可以将所述图像的强度和/或其它属性彼此进行比较。可以组合这些结果以测量所述光刻过程的不同参数。重叠性能是这种参数的示例。
图6描绘了具有图3A的第二测量分支的替代配置,并且其中在照射路径中设置替代孔板来代替孔板13N或13S。可在图3A所示的孔板13N或13S的位置处设置所述替代孔板。照射分支在图6中未详细示出以避免重复,但是可以如图3A所示进行配置,或者可以是提供与下文所描述的实施例相兼容的光学功能的任何其他配置。第一测量分支可能存在,也可能不存在。替代孔板限定了一种照射模式,如图6右下部分中示意性所描绘并且标记为60。所述照射模式使得辐射不从光瞳平面中的两个截然相反的象限71入射到目标T上,并且辐射从光瞳平面中的另外两个截然相反的象限72入射到目标T上。与包括四个周期性结构32至35的目标T相结合,此照射模式导致如由图6中标记为74的光瞳平面辐射分布的轴向视图所指示的光瞳平面中的第0、+1和-1衍射射线的分离。在X方向上是周期性的周期性结构32和34的+1和-1阶的位置在分布74中被标记为X。在Y方向上是周期性的周期性结构33和35的+1和-1阶的位置在分布74中被标记为Y。针对所有周期性结构32至35的零阶辐射保留在分布74中标记为“0”的象限中。
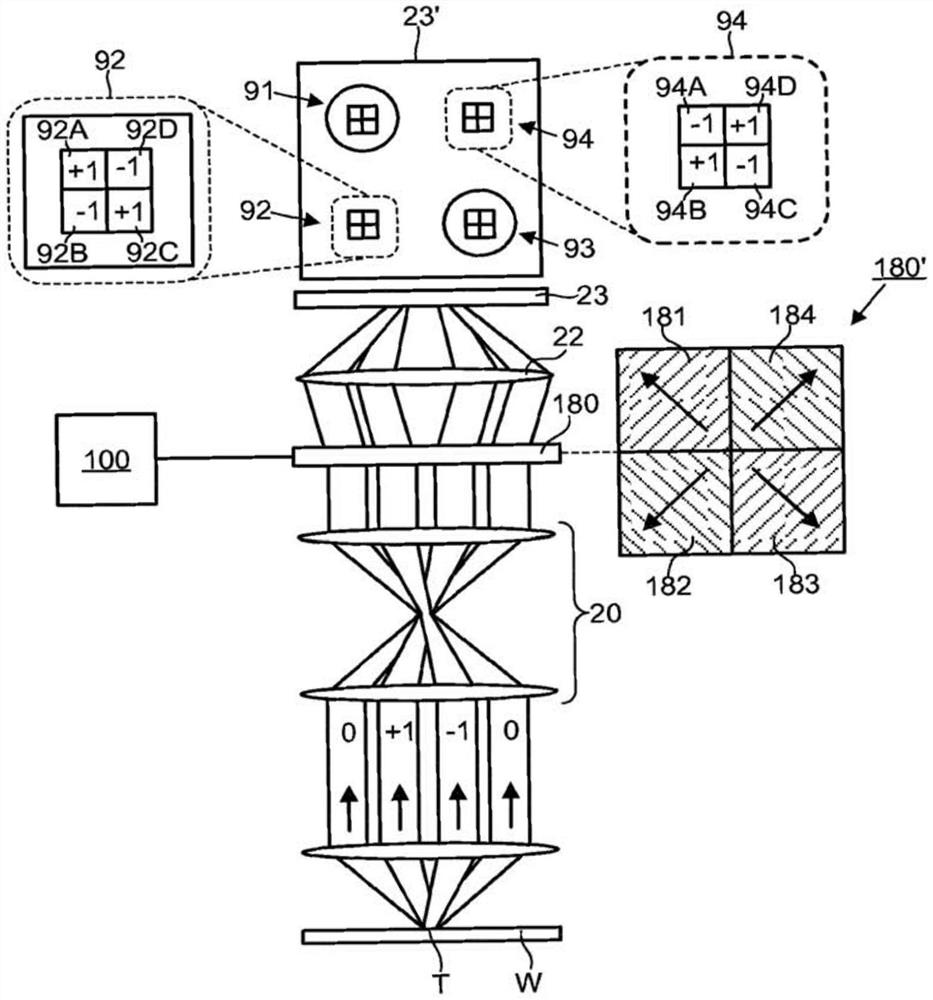
楔形光学元件81至84的组80被设置在光瞳平面中而不是孔径光阑21中。楔形光学元件的组80的轴向视图被标记为80’。此示例中的楔形光学元件的组80包括四个楔形光学元件81至84。当沿着光学系统的光轴观看时,每个楔形光学元件填充所述光瞳平面中圆形区域的象限。每个楔形光学元件81至84具有下部平面表面和上部平面表面,并且由具有不同于1的折射率的光学材料形成。下部平面表面相对于上部平面表面倾斜地对准(以楔形的方式)。在所示的示例中,每个楔形光学元件81至84的最大梯度沿径向对准,如由图6的轴向视图80’中的径向箭头所指示。每个楔形光学元件81至84具有从光轴到楔形光学元件81至84的径向最外边缘的线性厚度变化。楔形光学元件81至84中的每个接收在光瞳平面辐射分布74的多个象限中的不同的对应的一个象限中的辐射,并且重定向所述辐射以使得在传感器23上的不同部位处的传感器23上形成所述目标T的图像。传感器23的轴向视图在图6中被标记为23’,并且显示了分别由穿过楔形元件81至84的辐射所形成的图像91至94的示例定位。如上所提及,这里使用广义的术语“图像”。如果某些相关衍射阶不存在,则图像可能不包括所述目标T的所有细节(例如,光栅线)。在此示例中,图像91和93对应于仅由零阶辐射所形成的所述目标T的图像。图像92包括由来自周期性结构32的+1衍射射线所形成的子图像92A、与来自周期性结构33的-1衍射射线对应的子图像92B、与来自周期性结构34的+1衍射射线对应的子图像92C、以及与来自周期性结构35的-1衍射射线对应的子图像92D。图像94包括由来自周期性结构32的-1衍射射线所形成的子图像94A、与来自周期性结构33的+1衍射射线对应的子图像94B、与来自周期性结构34的-1衍射射线对应的子图像94C、以及与来自周期性结构35的+1衍射射线对应的子图像94D。
图6的布置允许同时单独测量由不同衍射分量(例如-1衍射射线、+1衍射射线、和零阶衍射射线)所形成的目标T中的多个周期性结构32至35的图像。由于楔形元件81至84的静态特性,传感器23上的图像的定位对于给定目标T和照射模式是固定的,并且对于所有目标和照射模式可能不是最优的。如果图像的定位对于给定的目标T和/或照射模式为非最优的,则楔形元件81至84可能需要由具有不同配置的楔形元件替换。这是费时且昂贵的。
在一替代实施例中(其一个示例在下面参考图7进行描述),楔形光学元件81至84被可编程的空间光调制器(SLM)替代,其在如何将图像定位在传感器上的方面提供了较大灵活性,以及可选地允许施加光学校正。在这种类型的实施例中,提供了一种测量设备,该测量设备具有利用辐射来照射目标T并且将来自目标T的反射辐射引导到传感器23的光学系统。例如,除了设置SLM 180来代替楔形光学元件81至84之外,所述光学系统可以如上文参考图3A和6所描述的来进行配置。
SLM 180被设置于所述光学系统的光瞳平面中。SLM 180被示意性地描绘为单个单元,但是将理解,SLM 180可以包括能够在光瞳平面中提供所需的幅度和/或相位调制的部件的任何合适的组件。部件的组件可以包括一个或更多个透镜、一个或更多个孔、以及单独可控元件的一个或更多个阵列。由SLM 180所产生的示例相位图案的轴向视图在图7中被标记为180’。SLM 180例如经由控制单元100被编程来重定向多个光瞳平面区域181至184中的每个区域中的光,以使得在传感器23上的不同部位处形成相应的多个图像91至94。每个图像91至94由穿过光瞳平面区域181至184中的不同的对应的一个区域的辐射形成。SLM 180可以包括能够实现上述功能的任意多个单独可控的光学元件,包括基于液晶或数字微反射镜的模式。可单独控制的元件或元素可被称为像素。SLM 180中要包括的像素的数目可以根据各种因素来选择,可选地包括以下一个或更多个因素:待测量的目标T的大小、光学系统的焦距、光学系统的物镜的NA,以及用于测量所述目标T的辐射波长。作为示意性示例,在使用25微米束斑和500nm辐射的一个实施例中,发现使用至少约600×600像素、优选地约1500×1500像素是有益的。
在一个实施例中,SLM 180在光瞳平面区域181至184中的两个或更多个中的每个中的光瞳平面中施加相位梯度(即,由SLM 180所施加的相位变化率作为SLM的平面内的位置的函数)。在一实施例中,相位梯度沿在光瞳平面区域181至184中两个或更多个的每个中的光瞳平面中的所有径向方向是恒定的。在实施例中,每个光瞳平面区域181至184中的相位梯度使得模拟一个或更多个概念的或假想的楔形光学元件(诸如上面参考图6所描述的楔形光学元件81至84的组)的光学效果,每个概念的或假想的楔形光学元件具有下部平面表面和相对于所述下部平面表面倾斜地对准的上部平面表面。在一实施例中,与光瞳平面区域181至184中的至少一个光瞳平面区域相对应的概念的或假想的楔形光学元件具有相对于与光瞳平面区域181至184中的至少另一个光瞳平面区域相对应的概念的或假想的楔形光学元件的不同取向,和/或所述下部平面表面与所述上部平面表面形状之间的不同角度。因而,SLM 180可以模仿如图6所描绘的一组楔形光学元件81至84。在该特定示例中,每个楔形光学元件81至84在上部平面表面与下部平面表面之间具有相同角度(即,相同楔形角度),并且相对于其相邻物以90度定向并且被定位成使得针对每个楔形元件81至84的最大梯度是径向地对准的。
在一实施例中,多个光瞳平面区域181至184中的每个包括相对于光学系统的穿过光瞳平面的光轴在不同方位角范围内的区域。在一实施例中,对于每个光瞳平面区域181至184,方位角范围的大小是相同的,使得N个光瞳平面区域的第k个光瞳平面区域的范围相对于任意径向参考线是从
在一实施例中,所述光学系统被配置成使得当所述目标T包括周期性结构32至35时,来自周期性结构32至35的相反符号(例如,+1和-1)的高于零阶衍射分量(例如一阶衍射射线)分别穿过光瞳平面区域181至184的不同光瞳平面区域(例如182或184)。在图7的实施例中,这可以例如通过使用如图6所描绘的照射模式60和目标T来实现,以提供如图6所示的光瞳平面辐射分布74。以周期性结构32为例,可以看到+1衍射射线仅穿过光瞳平面区域184,并且-1衍射射线仅穿过完全相对的光瞳平面区域182。引导不同符号的衍射射线穿过不同的光瞳平面区域,允许实现由所述衍射射线所形成的图像被定位在传感器23上的不同相应部位处,由此允许实现单独地测量图像。这允许有效地测量光瞳平面中的不对称性(例如,通过比较来自+1衍射射线的图像与来自-1衍射射线的图像的强度)。
在一实施例中,所述光学系统被配置成使得当所述目标T包括周期性结构32至35时,零阶辐射主要穿过除了高于零阶衍射分量的相反符号(例如+1和-1)穿过的光瞳平面区域182和184之外的光瞳平面区域(例如181或183)。引导零阶辐射穿过除了高于零阶辐射穿过的那些光瞳平面区域之外的光瞳平面区域,会允许实现仅由零阶辐射所形成的图像被定位在传感器23上的多个分离的部位处,由此允许实现单独地测量所述图像。这可以允许较有效地提取包含于零阶辐射中的关于所述目标T的信息。
在一实施例中,SLM 180应用了具有以下形式的分量的调制:
其中k
除了模仿楔形光学元件的操作之外,发明人已经认识到,以上述方式包括SLM 180还提供了如下可能性,即:以超越仅控制由从目标T反射的辐射的不同衍射分量所形成的图像的相对位置的方式来修改在传感器23上所形成的图像的可能性。特别地,在一些实施例中,SLM 180用于对穿过光瞳平面的辐射附加地施加光学校正。原则上可以施加各种类型的光学校正,包括例如以下一种或多种:聚焦调整、针对光学像差的校正。
在一实施例中,通过使用以下形式
在一实施例中(其示例如图10所描绘),SLM 180在传感器23上形成多组图像111至114。在图10的示例中,形成四组图像111至114。组111定位于图10所示的传感器23的正方形区域的左上象限内。组112定位于图10所示的传感器23的正方形区域的左下象限内。组113定位于图10所示传感器23的正方形区域的右下象限内。组114定位于图10所示传感器23的正方形区域的右上象限内。每组中的每个图像包含分别与在本示例中正在被测量的目标T的四个周期性结构32至35对应的四个子图像(其具有与图6中所描绘的目标T相同的形式)。
每组图像111至114包括通过将多个光瞳平面区域中的每个光瞳平面区域中的光重定向到传感器23上的不同部位而形成的图像。在一实施例中,每组111至114包含来自辐射的图像(该辐射来自同一组不同光瞳平面区域)。因而,在一实施例中,每组111至114可以包含图7中传感器23的轴向视图23’中所示的四个图像中的所有图像。在图10的特定示例中,在每个组中仅两个图像可见(尽管两个图像中的每个图像包含分别源自所述目标T中的四个不同周期性结构32至35的四个子图像)。
SLM 180对每组111至114的图像施加不同的光学校正(例如,不同的校正量,诸如不同的聚焦调整的量)。SLM 180还在传感器23上的不同区域中的每组图像111至114。因此,可以同时评估每个不同光学校正的效果。通过比较不同组的图像,可以识别最优的光学校正。在图10中所示的示例中,被施加以形成组113的光学校正(聚焦调整)似乎是最好的(图像是最清晰的)。因此,可以使用组113的图像来提取关注的参数(例如重叠),或者可以通过使用与组113相对应的光学校正来执行其他测量,图10的结果已被确立为提供对于光学校正和/或无光学校正的其他值的改进。可选地或另外地,在光学校正包括聚焦调整的实施例中,可以使用利用不同聚焦调整而形成的组111至114来获得相位信息。相位信息可用于图像重构应用。
在一实施例中,通过将SLM 180配置为应用具有以下形式
在上面讨论由SLM 180所施加的调制的不同分量的情况下,应当理解,它们可以用任何方式彼此组合和/或与其他调制组合,包括例如通过将它们相乘或通过将它们相加。例如,在一实施例中,SLM180应用具有以下形式W(k
如果使用基于数字微反射镜的SLM 180,则诸如Lee全息术(参见Wai-Hon Lee,“Binary computer-generated holograms”,Applied Optics 18,3661(1979))之类的技术可以用于调制相位和幅度两者。如果SLM 180仅能够应用相位调制,则应用Gerchberg-Saxton型算法(参见R.W.Gerchberg和W.O.Saxton,“A practical algorithm for thedetermination of the phase from image and diffraction plane pictures”,Optik35,237(1972);或Christian Maurer等人的“Depth of field multiplexing inmicroscopy”,Optics Express,183023(2010))可用于找到能够提供由上述调制所需的功能的优化相位图案。
上述测量设备可用于测量由任何光刻过程所形成的周期性结构,包括由如上文参考图1和图2所描述的光刻设备所执行的光刻过程。
本公开的实施例可以采取如下形式:计算机程序,所述计算机程序包含描述如本文中所披露的方法的机器可读指令的一个或更多个序列;或其中储存有这种计算机程序的数据储存介质(例如,半导体存储器、磁盘或光盘)。此外,机器可读指令可以被包含于两个或更多个计算机程序中。所述两个或更多个计算机程序可以被储存在一个或更多个不同的存储器和/或数据储存介质上。
本文中描述的任何控制器可以在一个或更多个计算机程序由位于所述光刻设备的至少一个部件内的一个或更多个计算机处理器读取时各自地操作、或能够以组合方式而操作。所述控制器可以各自地或以组合方式具有用于接收、处理和发送信号的任何合适的配置。一个或更多个处理器被配置成与所述控制器中的至少一个控制器通信。例如,每个控制器可以包括用于执行包括用于上文描述的方法的机器可读指令的计算机程序的一个或更多个处理器。控制器可以包括用于储存这些计算机程序的数据储存介质,和/或用以接纳这种介质的硬件。因此,所述控制器可以根据一个或更多个计算机程序的机器可读指令而操作。
尽管在本文中可以具体地提及量测设备在IC制造中的使用,但应理解,本文中描述的量测设备和过程可以具有其它应用,诸如制造集成光学系统、用于磁畴存储器的引导和检测图案、平板显示器、液晶显示器(LCD)、薄膜磁头等。本领域技术人员将了解到,在这些替代应用的情境下,可以认为本文中对术语“晶片”或“管芯”的任何使用分别与更上位的术语“衬底”或“目标部分”同义。可以在曝光之前或之后在例如涂覆显影系统或轨道(track)(即典型地将抗蚀剂层施加至衬底且显影曝光后的抗蚀剂的工具)、量测工具和/或一个或更多个各种其它工具中处理本文中提及的所述衬底。在适用情况下,可以将本文中的公开内容应用于这些和其它衬底处理工具。此外,可以将所述衬底处理多于一次,例如,以便创建多层IC,从而使得本文中所使用的术语衬底也可以指代已经包含多个处理后的层的衬底。
尽管在上文可能已经具体地提及在光学光刻术的情境下的本公开的实施例的使用,但应理解,本公开可以用于其它应用(例如,纳米压印光刻术)中,并且在情境允许的情况下不限于光学光刻术。在纳米压印光刻术的情况下,所述图案形成装置是压印模板或模具。
本文中所使用的术语“辐射”和“束”涵盖所有类型的电磁辐射,包括紫外(UV)辐射(例如,具有为或约为365nm、355nm、248nm、193nm、157nm或126nm的波长)和极紫外(EUV)辐射(例如,具有在5nm至20nm的范围内的波长);以及粒子束(诸如离子束或电子束)。
术语“透镜”在情境允许时可以指各种类型的光学部件中的任一种光学部件或其组合,包括折射型、反射型、磁性型、电磁型和静电型光学部件。
本文中对跨越或超过阈值的提及可以包括:其值低于特定值、或低于或等于特定值的某物;其值高于特定值、或高于或等于特定值的某物;其基于例如参数而排名(通过例如分类)成高于或低于其它事物的某物,等等。
本文中对校正误差或误差的校正的提及包括消除误差或将误差减小至容许范围内。
如本文中所使用的术语“优化(“optimizing”和“optimization”)”是指代或意味着调整光刻设备、图案化过程等,使得光刻或图案化处理的结果和/或过程具有更期望的特性,诸如设计布局在衬底上的投影的较高的准确度、较大的过程窗等。因而,如本文中所使用的术语“优化(“optimizing”和“optimization”)”是指代或意味着识别用于一个或更多个变量的一个或更多个值的过程,所述一个或更多个值与用于那些一个或更多个变量的一个或更多个值的初始集合相比提供了在至少一个相关指标方面的改善,例如局部最优。应相应地解释“最优”和其它相关术语。在实施例中,可以迭代地应用优化步骤,以提供一个或更多个指标的进一步改善。
在系统的优化过程中,可以将所述系统或过程的品质因数表示为成本函数。优化过程归结为找出优化(例如,最小化或最大化)所述成本函数的系统或过程的参数(设计变量)的集合的过程。所述成本函数可以根据优化的目标而具有任何合适的形式。例如,所述成本函数可以是系统或过程的某些特性(评估点)相对于这些特性的预期值(例如,预期值)的偏差的加权均方根(RMS);所述成本函数也可以是这些偏差的最大值(即,最差偏差)。本文中的术语“评估点”应被广泛地解释为包括系统或过程的任何特性。由于系统或过程的实施的实践性,则所述系统的设计变量可以被限于有限范围和/或可以是相互依赖的。在光刻设备或图案化过程的情况下,所述约束常常与硬件的物理属性和特性(诸如可调谐范围和/或图案形成装置可制造性设计规则)相关联,并且评估点可以包括衬底上的抗蚀剂图像上的实体点,以及诸如剂量和聚焦之类的非实体特性。
虽然上文已描述本公开的特定实施例,但应了解,可以与描述的方式不同的其它方式来实践本公开。例如,本公开可采取如下形式:计算机程序,所述计算机程序包含描述如上文所披露的方法的机器可读指令的一个或更多个序列;或其中储存有这种计算机程序数据储存介质(例如,半导体存储器、磁盘或光盘)。
在框图中,所图示的部件被描绘为离散的功能区块,但实施例不限于本文中描述的功能性如所图示的来组织的系统。由部件中的每个部件所提供的功能性可以由软件或硬件模块提供,所述模块以与目前所描绘的方式不同的方式组织,例如,可以掺和、结合、复写、分解、分配(例如,在数据中心内或地理上),或以另外的不同的方式组织这种软件或硬件。本文中描述的功能性可以由执行储存在有形的非暂时性机器可读介质上的代码的一个或更多个计算机的一个或更多个处理器提供。在一些情况下,第三方内容分发网络可以托管在网络上传送的一些或全部信息,在这种情况下,在一定程度上信息(例如,内容)被认为被供给或以其它方式提供,所述信息可以通过发送指令以从内容分发网络获取所述信息而被提供。
除非另有具体陈述,否则根据所述论述,应理解的是,在整个本说明书中,运用诸如“处理”、“计算”、“确定”等术语的论述是指具体设备(诸如专用计算机、或类似的专用电子处理/计算装置)的动作或过程。
读者应了解,本申请描述若干发明。申请人已将这些发明分组成单个文件,而不是将那些发明分离成多个独立的专利申请,这是因为所述发明的相关主题可以在应用过程中有助于经济性。但不应合并这些发明的不同的优点和方面。在一些情况下,实施例解决本文中提及的所有缺陷,但应理解,所述发明是独立地有用的,并且一些实施例仅解决这些问题的子集或提供其它没有提及的益处,检阅本公开的本领域技术人员将明白所述益处。由于成本约束,目前可能无法主张本文中所披露的一些发明,并且可以在稍后的申请(诸如继续申请或通过修改本权利要求书)中主张所述发明。类似地,由于空间约束,本文档的摘要和发明内容的发明章节都不应被视为包含所有这些发明的全面清单或这些发明的所有方面。
应理解,描述和附图并不意图将本发明限于所披露的特定形式,而正相反,本发明意图涵盖属于如由所附权利要求限定的本发明的精神和范围内的所有修改、等效物和替代方案。
在以下编号方面中描绘根据本发明的另外的实施例:
1.一种测量设备,包括:
光学系统,所述光学系统被配置成利用辐射来照射目标和将反射辐射从所述目标引导到传感器;以及
可编程的空间光调制器,所述空间光调制器位于所述光学系统的光瞳平面中,所述空间光调制器被编程为重定向多个光瞳平面区域中的每个光瞳平面区域中的光,从而在所述传感器上的不同部位处形成相应的多个图像,每个图像由穿过所述多个光瞳平面区域中的不同的对应的一个光瞳平面区域的辐射形成。
2.根据方面1所述的测量设备,其中所述空间光调制器被配置成在所述多个光瞳平面区域中的两个或更多个光瞳平面区域中的每个光瞳平面区域中在所述光瞳平面中赋予相位梯度。
3.根据方面2所述的测量设备,其中所述相位梯度在所述多个光瞳平面区域中的两个或更多个光瞳平面区域中的每个光瞳平面区域中的沿所述光瞳平面中的所有径向方向是恒定的。
4.根据方面2或3所述的测量设备,其中每个光瞳平面区域中的所述相位梯度使得能够模拟具有下部平面表面和相对于所述下部平面表面倾斜地对准的上部平面表面的假想楔形光学元件的光学效果。
5.根据方面4所述的测量设备,其中,与所述多个光瞳平面区域中的至少一个光瞳平面区域相对应的假想楔形光学元件相对于与所述多个光瞳平面区域中的至少一个其它光瞳平面区域相对应的假想楔形光学元件具有不同的取向,和/或在所述下部平面表面与所述上部平面表面之间具有不同的角度。
6.根据任一前述方面所述的测量设备,其中所述多个光瞳平面区域中的每个光瞳平面区域包括相对于所述光学系统的穿过所述光瞳平面的光轴处于不同方位角范围内的区域。
7.根据方面6所述的测量设备,其中每个光瞳平面区域的方位角范围的大小相同,使得N个光瞳平面区域的第k个光瞳平面区域的范围相对于任意径向参考线是从
8.根据任一前述方面所述的测量设备,其中所述光学系统被配置成使得当所述目标包括周期性结构时,来自所述周期性结构的相反符号的高于零阶衍射分量分别穿过所述多个光瞳平面区域中的不同的光瞳平面区域。
9.根据方面8所述的测量设备,其中所述光学系统被配置成使得当所述目标包括周期性结构时,零阶辐射主要穿过除了相反符合的高于零阶衍射分量穿过的光瞳平面区域之外的光瞳平面区域。
10.根据任一前述方面所述的测量设备,其中所述空间光调制器被配置成应用具有以下形式的分量的调制:
其中k
11.根据任一前述方面所述的测量设备,其中:
所述空间光调制器被配置成对穿过所述光瞳平面的辐射附加地施加光学校正。
12.根据方面11所述的测量设备,其中光学校正包括以下中的一项或更多项:聚焦调整;针对光学像差的校正。
13.根据方面11或12所述的测量设备,其中所述空间光调制器包括具有以下形式的调制分量:
其中Δ表示由所述空间光调制器所施加的光学校正的量,并且k
14.根据方面11至13中任一项所述的测量设备,其中:
所述空间光调制器被配置成在所述传感器上形成多组图像;
每组图像包括通过将所述多个光瞳平面区域中的每个光瞳平面区域中的光重定向到所述传感器上的不同部位而形成的图像;
所述空间光调制器对每组图像施加不同的光学校正;以及
所述空间光调制器在所述传感器上的不同区域中形成每组图像,由此允许同时评估每个不同的光学校正的效果。
15.根据方面14所述的测量设备,其中所述空间光调制器被配置成施加具有以下形式的分量的调制:
其中Δ表示由所述空间光调制器所施加的光学校正的量,k
16.根据任一前述方面所述的测量设备,其中所述空间光调制器被配置成施加具有以下形式的分量的调制:
W(k
其中k
W(k
H(k
17.根据任一前述方面所述的测量设备,其中所述传感器被配置成检测在所述光学系统的成像平面中的所述传感器上的不同部位上所形成的图像。
18.根据项目17所述的测量设备,其中在所述传感器上的不同部位处所形成的图像包括所述目标的周期性结构的图像、或所述目标的不同的对应周期性结构的多个子图像。
19.根据任一前述方面所述的测量设备,其中所述目标包括由光刻设备所形成的至少一个周期性结构。
20.一种光刻系统,包括:
光刻设备,所述光刻设备被配置成执行光刻过程;以及
根据任一前述方面所述的测量设备,其中:
所述光刻设备被配置成使用由所述光刻过程所形成的周期性结构的测量设备的测量结果。
21.一种测量目标的方法,包括:
利用辐射照射所述目标,且在传感器上检测来自所述目标的反射辐射;
使用可编程的空间光调制器来重定向光瞳平面中的多个光瞳平面区域中的每个光瞳平面区域中的光,以在所述传感器上的不同部位处形成相应的多个图像,每个图像由穿过所述多个光瞳平面区域中的不同的对应的一个光瞳平面区域的辐射形成。
22.根据方面21所述的方法,还包括使用所述可编程的空间光调制器对穿过所述光瞳平面的辐射施加光学校正。
23.根据方面21或22所述的方法,其中:
所述空间光调制器用于在所述传感器上形成多组图像;
每组图像包括通过将所述多个光瞳平面区域中的每个光瞳平面区域中的光重定向到所述传感器上的不同部位而形成的图像;
对每组图像施加不同的光学校正;以及
每组图像形成在所述传感器上的不同区域中。
24.根据方面23所述的方法,还包括通过比较不同组的图像来识别最优光学校正。
鉴于本说明书,本领域技术人员将明白本发明的各个方面的修改和替代实施例。因而,本说明书和附图应被理解为仅是说明性的且是出于教导本领域技术人员执行本发明的一般方式的目的。应理解,本文中所示出和描述的本发明的形式应被视为实施例的示例。元件和材料可以替代本文中所图示和描述的元件和材料,部分和过程可以被颠倒或被省略,可以独立地利用某些特征,并且可以将实施例或实施例的特征组合,所有这些在获得本发明的本说明书的益处之后对于本领域技术人员将是清楚的。可以在不背离如在下列权利要求中所描述的本发明的精神和范围的情况下对本文中描述的元件作出改变。本文中所使用的标题仅为了实现组织性目的,并且不意味着用于限制本说明书的范围。
如在整个本申请中所使用的,词“可以”是以许可的意义(即,意味着可能)而不是强制性的意义(即,意味着必须)来使用。词语“包括”等意味着包括但不限于。如在整个本申请中所使用的,单数形式“一”、“一个”、“所述”包括多个提及物,除非上下文另有明确地指示。因而,例如,对“一”元件的提及包括两个或更多个元件的组合,尽管会针对一个或更多个元件使用其它术语和短语,诸如“一个或更多个”。除非另有指示,否则术语“或”是非独占式的,即,涵盖“和”与“或”两者。描述条件关系的术语,例如,“响应于X,发生Y”、“在发生X的情况下,发生Y”、“如果X,则Y”、“当X时,发生Y”等涵盖因果关系,其中前提是必要的因果条件,前提是充分的因果条件,或前提是结果的贡献因果条件,例如,“在条件Y获得后,即出现状态X”对于“仅在Y后,才出现X”和“在Y和Z后,即出现X”是通用的。这些条件关系不限于即刻遵循前提而获得的结果,这是由于一些结果可能被延迟,并且在条件陈述中,前提与它们的结果相关联,例如,前提与出现结果的可能性相关。除非另外指示,否则多个性质或功能被映射至多个对象(例如,执行步骤A、B、C和D的一个或更多个处理器)的陈述涵盖了所有这些性质或功能被映射至所有这些对象、以及性质或功能的子集被映射至性质或功能的子集两种情况(例如,这两种情况即:所有处理器各自执行步骤A至D;和其中处理器1执行步骤A、而处理器2执行步骤B和步骤C的一部分、且处理器3执行步骤C的一部分和步骤D的情况)。此外,除非另有指示,否则一个值或动作“基于”另一条件或值的陈述涵盖了条件或值是唯一因子的情况、以及条件或值是多个因子中的一个因子的情况两者。除非另外规定,否则某一集合体的“每个”实例均具有某一属性的陈述不应被理解为排除了其中较大的集合体的一些另外相同或相似的构件不具有所述属性的情况,即,每个不一定意味着每一个。
在某些美国专利、美国专利申请或其它材料(例如论文)已以引用方式并入的情况下,这些美国专利、美国专利申请和其它材料的文字仅在这种材料与本文中所阐述的陈述和附图之间不存在冲突的情况下被并入。在存在有这种冲突的情况下,这种以引用方式并入的美国专利、美国专利申请和其它材料中的任何这样的冲突文字不会具体地以引用方式并入本文中。
以上的描述意图是说明性的,而不是限制性的。因而,本领域技术人员将明白,可以在不背离下文所阐明的权利要求的范围的情况下对描述的公开内容进行修改。
- 由至少两个用于进行光学的车轴测量的目标装置构成的目标装置组以及用所述目标装置组进行光学的车轴测量的设备
- 用于通过在消逝场中的激发之后测量荧光放射来检测液体样本中的目标分子的测量盒和测量设备