一种基于看护机器人的看护方法及系统
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及机器人领域,特别是涉及一种基于看护机器人的看护方法及系统。
背景技术
随着现在老龄化现象的不断加剧,需要被看护的人员的数量在急剧上升。其中,随着空巢老人的不断增加,一旦发生突发状况,如果老人不能得到及时的发现和治疗,将耽误病情,造成不可挽回的严重后果,因而对老年人及时、有效的护理就显得格外重要。此外还有稚嫩的孩童,还有虚弱的病人,在寻常家庭中均需要人随时陪同照顾,否则很容易发生各种不同的危险,现有的看护机器人不能实时跟随待看护者,并且,不能准确的识别出待看护者。因此,亟需一种新的看护方法以解决现有技术中的看护机器人智能效果差的问题。
发明内容
本发明的目的是提供一种基于看护机器人的看护方法及系统,提高看护机器人的智能性。
为实现上述目的,本发明提供了如下方案:
一种基于看护机器人的看护方法,包括:
利用传感器进行室内空间扫描,获取室内空间内人员的图像;
根据所述图像以及已录入的待看护人员的图像确定待看护人员;
对所述待看护人员进行锁定,并实时获取所述待看护人员的位置信号;
根据位置信号自动跟随所述待看护人员。
可选的,所述根据所述图像以及已录入的待看护人员的图像确定待看护人员,具体包括:
根据所述图像确定室内空间的人员数量;
当所述人员数量不等于1个时,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤;
当所述人员数量等于1个时,则判断所述图像是否与所述已录入的待看护人员的图像相同;
若相同,则将所述图像对应的人员确定为所述待看护人员;
若不同,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
可选的,所述根据所述图像以及已录入的待看护人员的图像确定待看护人员,之后还包括:
实时获取所述待看护人员的体温值;
判断所述体温值是否超过体温阈值;
若超过,则发出报警信号并将所述体温值发送至紧急联系人;
若没有超过,则返回实时获取所述待看护人员的体温值的步骤,继续监测。
可选的,所述实时获取所述待看护人员位置信号,之后还包括:
获取室内空间内的声音信号;
判断所述声音信号是否超过声音阈值;
若超过,则对所述待看护人员进行抓图,并将抓图后的图像发送至紧急联系人;
若不超过,则返回所述获取室内空间内的声音信号的步骤。
一种基于看护机器人的看护系统,包括:
室内空间内人员的图像获取模块,用于利用传感器进行室内空间扫描,获取室内空间内人员的图像;
待看护人员确定模块,用于根据所述图像以及已录入的待看护人员的图像确定待看护人员;
位置信号获取模块,用于对所述待看护人员进行锁定,并实时获取所述待看护人员的位置信号;
自动跟随模块,用于根据位置信号自动跟随所述待看护人员。
可选的,所述待看护人员确定模块具体包括:
人员数量确定单元,用于根据所述图像确定室内空间的人员数量;
室内空间内人员的图像继续获取单元,用于当所述人员数量不等于1个时,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤;
第一判断单元,用于当所述人员数量等于1个时,则判断所述图像是否与所述已录入的待看护人员的图像相同;
待看护人员确定单元,用于若相同,则将所述图像对应的人员确定为所述待看护人员;
待看护人员继续确定单元,用于若不同,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
可选的,还包括:
体温值获取模块,用于实时获取所述待看护人员的体温值;
第一判断模块,用于判断所述体温值是否超过体温阈值;
体温值异常确定模块,用于若超过,则发出报警信号并将所述体温值发送至紧急联系人;
体温值继续监测模块,用于若没有超过,则返回实时获取所述待看护人员的体温值的步骤,继续监测。
可选的,还包括:
声音信号获取模块,用于获取室内空间内的声音信号;
第二判断模块,用于判断所述声音信号是否超过声音阈值;
抓图模块,用于若超过,则对所述待看护人员进行抓图,并将抓图后的图像发送至紧急联系人;
声音信号继续获取模块,用于若不超过,则返回所述获取室内空间内的声音信号的步骤。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明所提供的一种基于看护机器人的看护方法及系统,根据室内空间内人员的图像和已录入的待看护人员的图像确定待看护人员,对所述待看护人员进行锁定,并实时获取所述待看护人员的位置信号;根据位置信号自动跟随所述待看护人员,即实时跟随待看护人员,防止意外发生,进而提高了看护机器人的智能性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
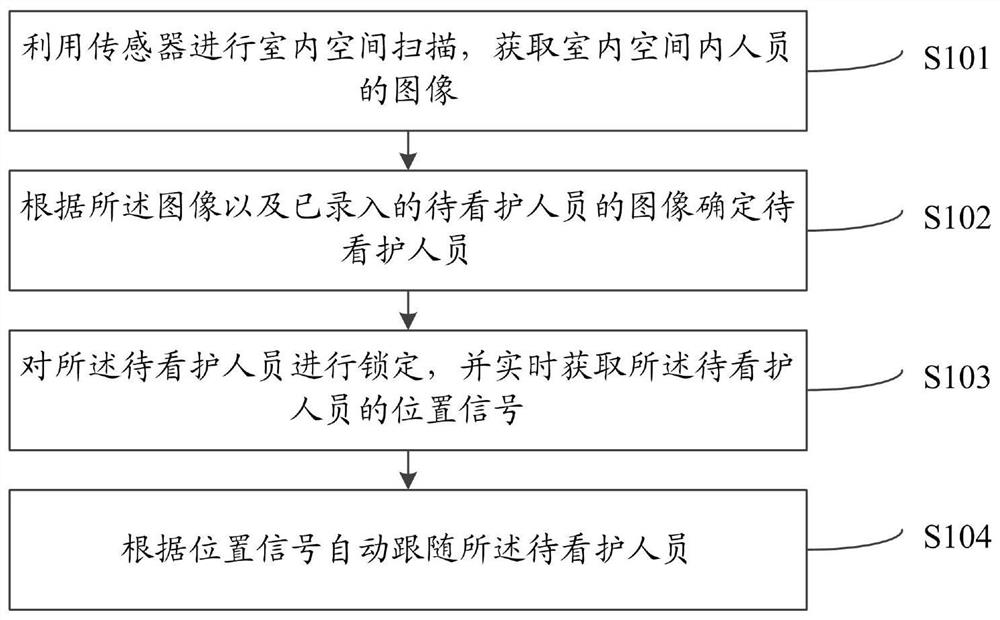
图1为本发明所提供的一种基于看护机器人的看护方法流程示意图;
图2为本发明所提供的一种基于看护机器人的看护系统结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种基于看护机器人的看护方法及系统,提高看护机器人的智能性。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明所提供的一种基于看护机器人的看护方法流程示意图,如图1所示,本发明所提供的一种基于看护机器人的看护方法,包括:
S101,利用传感器进行室内空间扫描,获取室内空间内人员的图像。
S102,根据所述图像以及已录入的待看护人员的图像确定待看护人员。
S102具体包括:
根据所述图像确定室内空间的人员数量。
作为一个具体的实施例,将所述图像采用神经网络模型进行人员数量的确定;所述神经网络模型以图像为输入,以图像中人员个数为输出。
当所述人员数量不等于1个时,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
当所述人员数量等于1个时,则判断所述图像是否与所述已录入的待看护人员的图像相同。
若相同,则将所述图像对应的人员确定为所述待看护人员。
若不同,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
即上述方法,保证跟随的准确性,进而保证了看护机器人的智能性。
S102之后还包括:
实时获取所述待看护人员的体温值。
判断所述体温值是否超过体温阈值。
若超过,则发出报警信号并将所述体温值发送至紧急联系人。
若没有超过,则返回实时获取所述待看护人员的体温值的步骤,继续监测。
S103,对所述待看护人员进行锁定,并实时获取所述待看护人员的位置信号。
作为一个具体的实施例,看护机器人利用红外线传感器确定待看护人员的位置信号,并控制摄像头实时监控所述待看护人员。
S103之后还包括:
获取室内空间内的声音信号。
判断所述声音信号是否超过声音阈值。
若超过,则对所述待看护人员进行抓图,并将抓图后的图像发送至紧急联系人。
若不超过,则返回所述获取室内空间内的声音信号的步骤。
S104,根据位置信号自动跟随所述待看护人员。
图2为本发明所提供的一种基于看护机器人的看护系统结构示意图,如图2所示,本发明所提供的一种基于看护机器人的看护系统,包括:室内空间内人员的图像获取模块201、待看护人员确定模块202、位置信号获取模块203以及自动跟随模块204。
室内空间内人员的图像获取模块201用于利用传感器进行室内空间扫描,获取室内空间内人员的图像。
待看护人员确定模块202用于根据所述图像以及已录入的待看护人员的图像确定待看护人员。
位置信号获取模块203用于对所述待看护人员进行锁定,并实时获取所述待看护人员的位置信号。
自动跟随模块204用于根据位置信号自动跟随所述待看护人员。
所述待看护人员确定模块202具体包括:人员数量确定单元、室内空间内人员的图像继续获取单元、第一判断单元、待看护人员确定单元以及待看护人员继续确定单元。
人员数量确定单元用于根据所述图像确定室内空间的人员数量。
室内空间内人员的图像继续获取单元用于当所述人员数量不等于1个时,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
第一判断单元用于当所述人员数量等于1个时,则判断所述图像是否与所述已录入的待看护人员的图像相同。
待看护人员确定单元用于若相同,则将所述图像对应的人员确定为所述待看护人员。
待看护人员继续确定单元用于若不同,则返回所述利用传感器进行室内空间扫描,获取室内空间内人员的图像的步骤。
本发明所提供的一种基于看护机器人的看护系统,还包括:体温值获取模块、第一判断模块、体温值异常确定模块以及体温值继续监测模块。
体温值获取模块用于实时获取所述待看护人员的体温值。
第一判断模块用于判断所述体温值是否超过体温阈值。
体温值异常确定模块用于若超过,则发出报警信号并将所述体温值发送至紧急联系人。
体温值继续监测模块用于若没有超过,则返回实时获取所述待看护人员的体温值的步骤,继续监测。
本发明所提供的一种基于看护机器人的看护系统,还包括:声音信号获取模块、第二判断模块、抓图模块以及声音信号继续获取模块。
声音信号获取模块用于获取室内空间内的声音信号。
第二判断模块用于判断所述声音信号是否超过声音阈值。
抓图模块用于若超过,则对所述待看护人员进行抓图,并将抓图后的图像发送至紧急联系人。
声音信号继续获取模块用于若不超过,则返回所述获取室内空间内的声音信号的步骤。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种基于看护机器人的看护方法及系统
- 一种智能看护提醒方法、看护端设备及智能看护系统