一种用于工件翻转的夹持平台及工件打磨清理系统
文献发布时间:2023-06-19 10:46:31
技术领域
本发明属于工件清理技术领域,尤其涉及一种用于工件翻转的夹持平台及工件打磨清理系统。
背景技术
铸件的飞边、毛刺以及浇冒口通常存在于铸件的各个面上,现有的设备,无论是采用刀具不动工件运动的方式,还是采用工件不动刀具动的方式,都难以一次性将工件清理干净。这样不利于提高铸件清理的工作效率。
在刀具不动工件运动的方式中,需要根据需要清理的部位不同分别设计不同的夹具,使清理部位暴露在外便于清理。每个工序需要一套夹具,夹具数量随着复杂程度的上升而增多,共计在各工序之间的流转时,需要人工或者机器人辅助上下料。造成辅助时间增加,设备结构复杂,成本高,效率低。
在工件不动刀具动的方式中,需要根据工件的特点配备不同的抓手。两个抓手之间通常配备有中转机构。这类设备抓手通常是安装在机器人上,需要多台机器人协同工作。
发明内容
本发明要解决的技术问题是提供一种用于工件翻转的夹持平台及工件打磨清理系统,以解决现有工件打磨清理时工件中转的问题。
为解决上述问题,本发明的技术方案为:
本发明的一种用于工件翻转的夹持平台,包括机架、第一夹持部和第二夹持部;
所述机架设于外部平台上;
所述第一夹持部和所述第二夹持部分别设于所述机架上,分别用于夹持并带动待加工工件翻转;所述第一夹持部的夹持方向和翻转方向均垂直于所述第二夹持部,且所述第一夹持部的翻转轨迹与所述第二夹持部的翻转轨迹相干涉;
其中,所述第一夹持部和所述第二夹持部均为一夹持结构,所述夹持结构包括转动单元、驱动单元、执行单元和夹持单元;所述转动单元设于所述机架上,输出端与所述执行单元的第一端相连接,用于带动所述执行单元转动;所述驱动单元设于所述机架上,输出端与所述转动单元的输入端连接,用于输出驱动力至所述转动单元;所述夹持单元设于所述执行单元的第二端,用于夹持待加工工件。
本发明的用于工件翻转的夹持平台,所述转动单元包括第一轴承座、第二轴承座、传动轴、支撑轴;
所述第一轴承座和所述第二轴承座分别设于所述机架上,且轴线相同;
所述传动轴通过轴承转动连接于所述第一轴承座,第一端伸出于所述第一轴承座的第一端并与所述执行单元的输入端相连,第二端伸出于所述第一轴承座的第二端并与所述驱动单元的输出端相连;
所述支撑轴通过轴承转动连接于所述第二轴承座,一端伸出于所述第二轴承座的第一端并与所述执行单元的输入端相连。
本发明的用于工件翻转的夹持平台,所述转动单元还包括密封盖和若干密封圈;
所述密封盖设于所述第二轴承座的第二端;所述密封圈分别设于所述第一轴承座的第一端和所述第二轴承座的第一端,用于实现动密封。
本发明的用于工件翻转的夹持平台,所述第一轴承座内的轴承为背靠背设置的两个圆锥滚子轴承。
本发明的用于工件翻转的夹持平台,所述驱动单元包括直线运动机构、曲柄;所述曲柄设于所述转动单元的输入端上;所述直线运动机构设于所述机架上,输出端与所述曲柄的输入端相连,用于带动所述曲柄旋转。
本发明的用于工件翻转的夹持平台,所述直线运动机构为液压缸、气缸或电动推杆。
本发明的用于工件翻转的夹持平台,所述执行单元为一摆臂,所述摆臂的两端分别与所述转动单元和所述夹持单元相连;
所述摆臂上还设有第一限位件;所述机架上设有与所述第一限位件对应的第二限位件,用于配合所述第一限位件对所述摆臂的转动进行限位。
本发明的用于工件翻转的夹持平台,所述第一限位件为V型块,所述第二限位件为V型槽。
本发明的用于工件翻转的夹持平台,所述夹持单元包括夹具和管线;所述夹具安装于所述执行单元的输出端,所述管线穿设于所述执行单元的中空内腔,且两端分别与所述夹具和外部设备相连。
本发明的一种工件打磨清理系统,包括上述任意一项所述的用于工件翻转的夹持平台。
本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
1、本发明一实施例通过在机架上互相垂直设置第一夹持部和第二夹持部,并由转动单元、驱动单元、执行单元和夹持单元组成,由驱动单元驱动转动单元,并由转动单元带动执行单元进行翻转运动,设置在执行单元上的夹持单元则用于对待加工工件进行夹持,且两个夹持部的翻转轨迹相干涉。以正方形工件为例,在清理时,先由第一夹持部夹持待加工工件相对的两个面,即可由第一夹持部翻转至加工位置对其他四个面进行清理,清理完成后,第一夹持部翻转至与第二夹持部的轨迹相交处,由第二夹持部对已加工的表面进行夹持,并翻转至加工位置对剩余两个面进行清理。在该工作台上能够一次将工件各个面清理完毕,解决了现有工件打磨清理时工件中转的问题。减少工件中转次数,减少中转所需设备,压缩工件中转时间。
2、本发明一实施例通过在执行单元和机架上分别设置相对应的第一限位件和第二限位件,当执行单元转到工作位置时,第一限位件与第二限位件啮合,从而限制了执行单元前后方向和左右方向的移动,可以提高执行单元的刚度和定位的重复精度,同时能够降低打磨时的抖动,并能够长期保持设备的定位精度,保证产品的一致性。解决了设备精度随着使用时间推移逐渐偏移的问题,使设备能够保持长期稳定运行。
附图说明
图1为本发明的用于工件翻转的夹持平台的示意图;
图2为本发明的用于工件翻转的夹持平台的另一示意图;
图3为本发明的用于工件翻转的夹持平台的夹持结构的剖视图;
图4为本发明的用于工件翻转的夹持平台的限位部分的示意图;
图5为本发明的用于工件翻转的夹持平台的驱动单元的示意图;
图6为本发明的用于工件翻转的夹持平台的驱动单元的另一示意图;
图7为本发明的用于工件翻转的夹持平台在工作状态下的示意图。
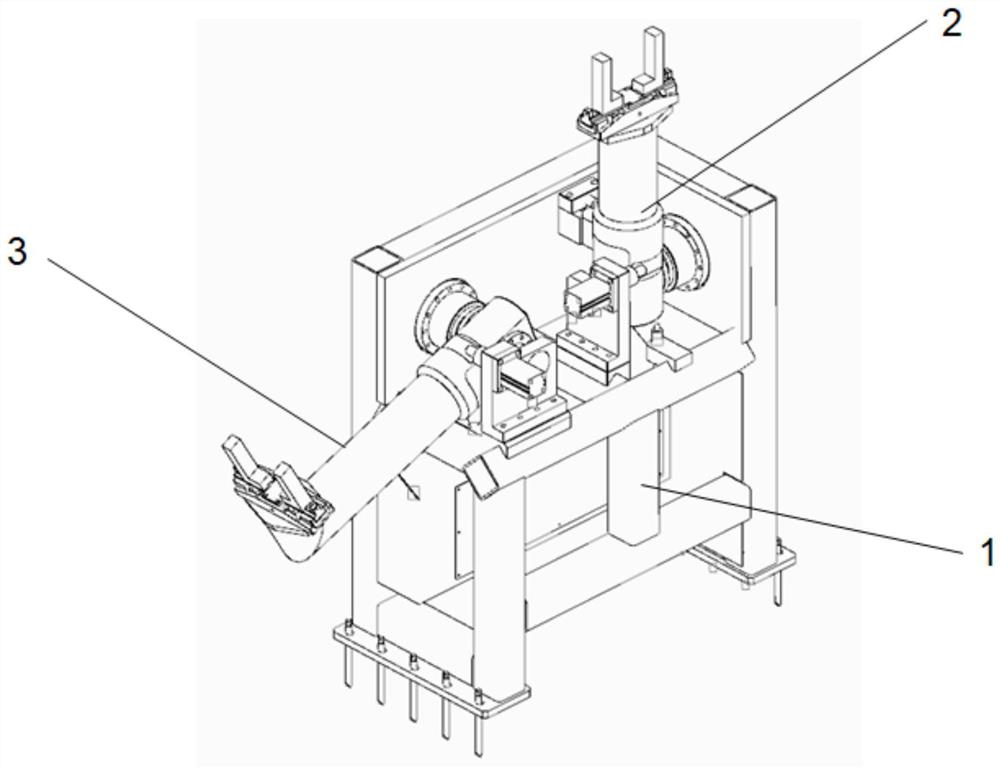
附图标记说明:1:机架;2:第一夹持部;3:第二夹持部;4:摆臂;5:第一轴承座;6:传动轴;7:第二轴承座;8:支撑轴;9:圆锥滚子轴承;10:圆螺母;11:密封盖;12:密封圈;13:曲柄;14:直线运动机构;15:第一限位件;16:第二限位件;17:夹具。
具体实施方式
以下结合附图和具体实施例对本发明提出的一种用于工件翻转的夹持平台及工件打磨清理系统作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
实施例一
参看图1、图2和图7,在一个实施例中,一种用于工件翻转的夹持平台,包括机架1、第一夹持部2和第二夹持部3。
机架1设于外部平台上。第一夹持部2和第二夹持部3分别设于机架1上,分别用于夹持并带动待加工工件翻转。第一夹持部2的夹持方向和翻转方向均垂直于第二夹持部3,且第一夹持部2的翻转轨迹与第二夹持部3的翻转轨迹相干涉。
其中,第一夹持部2和第二夹持部3均为一夹持结构,夹持结构包括转动单元、驱动单元、执行单元和夹持单元。转动单元设于机架1上,输出端与执行单元的第一端相连接,用于带动执行单元转动。驱动单元设于机架1上,输出端与转动单元的输入端连接,用于输出驱动力至转动单元。夹持单元设于执行单元的第二端,用于夹持待加工工件。
本实施例通过在机架1上互相垂直设置第一夹持部2和第二夹持部3,并由转动单元、驱动单元、执行单元和夹持单元组成,由驱动单元驱动转动单元,并由转动单元带动执行单元进行翻转运动,设置在执行单元上的夹持单元则用于对待加工工件进行夹持,且两个夹持部的翻转轨迹相干涉。以正方形工件为例,在清理时,先由第一夹持部2夹持待加工工件相对的两个面,即可由第一夹持部2翻转至加工位置对其他四个面进行清理,清理完成后,第一夹持部2翻转至与第二夹持部3的轨迹相交处,由第二夹持部3对已加工的表面进行夹持,并翻转至加工位置对剩余两个面进行清理。在该工作台上能够一次将工件各个面清理完毕,解决了现有工件打磨清理时工件中转的问题。减少了工件中转次数,压缩工件中转时间,减少中转所需设备,从而减小了设备体积,同时可实现工件的自动抓取、移动。
下面对本实施例的用于工件翻转的夹持平台的具体结构进行进一步说明:
参看图3,在本实施例中,执行单元为一摆臂4,摆臂4的两端则分别与转动单元和夹持单元相连,由转动单元带动摆臂4以其一端为圆心进行转动。
在本实施例中,转动单元具体可包括第一轴承座5、第二轴承座7、传动轴6、支撑轴8。
第一轴承座5和第二轴承座7分别设于机架1上,且轴线相同。传动轴6通过轴承转动连接于第一轴承座5,第一端伸出于第一轴承座5的第一端并与摆臂4的输入端相连,第二端伸出于第一轴承座5的第二端并与驱动单元的输出端相连。支撑轴8则通过轴承转动连接于第二轴承座7,一端伸出于第二轴承座7的第一端并与摆臂4的输入端相连。即机架1上的第一轴承座5和第二轴承座7配合形成了一用于容置摆臂4的空间,两个轴承座内分别设置传动轴6和支撑轴8,并伸入于该空间内与其内的摆臂4相连接,传动轴6用于传递驱动单元的动力带动摆臂4转动,支撑轴8则用于对摆臂4的输入端的另一侧进行支撑,起到提高摆臂4刚性的作用。其中。传动轴6和支撑轴8可通过螺栓或其他紧固方式连接至摆臂4。
进一步地,转动单元还可包括密封盖11和若干密封圈12。密封盖11设于第二轴承座7的第二端,用于实现第二轴承座7的静密封。密封圈12则可分别设于第一轴承座5的第一端和第二轴承座7的第一端,用于实现支撑轴8和传动轴6处的动密封,从而配合静密封防止灰尘进入轴承。
具体地,第一轴承座5内的轴承为背靠背设置的两个圆锥滚子轴承9,通过圆螺母10将圆锥滚子轴承9轴向固定。
参看图5和图6,驱动单元则包括直线运动机构14、曲柄13。曲柄13设于传动轴6的输入端。直线运动机构14设于机架1上,输出端与曲柄13的输入端相连,用于带动曲柄13旋转。具体地,直线运动机构14可通过铰链销与曲柄13的输入端连接,当直线运动机构14伸缩的时候,通过曲柄13带动传动轴6正反转,从而带动摆臂4并使夹具17抬起和放下。其中,直线运动机构14可为液压缸、气缸或电动推杆。
夹持单元则包括夹具17和管线。夹具17安装于摆臂4的输出端,管线穿设于摆臂4,且两端分别与夹具17和外部设备相连。其中,摆臂4和传动轴6为均可为中空轴,驱动夹具17的管路从摆臂4和传动轴6的通孔中穿过。夹具17则可以采用液压、气压或电动的方式驱动,在此不作具体限定。
参看图4,在本实施例中,摆臂4上还可设有第一限位件15,机架1上设有与第一限位件15对应的第二限位件16,用于配合第一限位件15对摆臂4的转动进行限位。其中,第一限位件15可为V型块,第二限位件16可为V型槽。当然,除了V型块和V型槽的方式,也可以采用销孔定位的方式替换,在此不作具体限定。
当摆臂4转到工作位置时,V形块与V型槽啮合,从而限制了摆臂4前后方向和左右方向的移动,可以提高摆臂4的刚度和定位的重复精度,同时能够降低打磨时的抖动,并能够长期保持设备的定位精度,保证产品的一致性。解决了设备精度随着使用时间推移逐渐偏移的问题,使设备能够保持长期稳定运行。
实施例二
一种工件打磨清理系统,包括上述实施例一的用于工件翻转的夹持平台。该夹持平台在机架1上互相垂直设置第一夹持部2和第二夹持部3,且两个夹持部的翻转轨迹相干涉。以正方形工件为例,在清理时,先由第一夹持部2夹持待加工工件相对的两个面,即可由第一夹持部2翻转至加工位置对其他四个面进行清理,清理完成后,第一夹持部2翻转至与第二夹持部3的轨迹相交处,由第二夹持部3对已加工的表面进行夹持,并翻转至加工位置对剩余两个面进行清理。在该工作台上能够一次将工件各个面清理完毕,解决了现有工件打磨清理时工件中转的问题。减少了工件中转次数,压缩工件中转时间,减少中转所需设备,从而减小了设备体积,同时可实现工件的自动抓取、移动。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
- 一种用于工件翻转的夹持平台及工件打磨清理系统
- 一种工件翻转装置和工件翻转系统