潜望式摄像头及电子设备
文献发布时间:2023-06-19 19:16:40
技术领域
本申请涉及摄像头技术领域,具体涉及一种潜望式摄像头及电子设备。
背景技术
潜望式摄像头由于定位于远景拍摄,抖动对拍摄画面的影响比传统的直立式摄像头要大,因此,光学防抖功能一直是潜望式摄像头的重点研究方向。相关技术中,采用了防抖设计的潜望式摄像头一般包括壳体、反射件(比如棱镜)、防抖组件,其中,反射件面向于壳体上的透光部(也可称为透光窗口),防抖组件可驱动反射件相对透光部运动,从而实现防抖功能。然而,在防抖组件断电的情况下,反射件在机械额定防抖角度内处于随机的偏转位置,偏转的反射件相对透光部歪斜,也就是说,反射件在偏转后,反射件的边缘相对透光部的边缘歪斜,此时,人眼可以观察到反射件的歪斜状况,而歪斜的反射件将显得不美观。
发明内容
本申请提供一种可以纠正反射件歪斜问题的潜望式摄像头及电子设备。
第一方面,本申请提供一种潜望式摄像头,包括:
壳体,所述壳体具有可以透过光线的透光部;
反射组件,所述反射组件包括载体架、反射件、第一回正件,所述反射件和所述第一回正件均承载于所述载体架,所述反射件与所述透光部相对设置,且所述反射件用于反射来自所述透光部的光线;
回正组件,所述回正组件包括第二回正件,所述第二回正件与所述第一回正件相对设置且相互磁吸;以及
驱动组件,所述驱动组件包括第一防抖驱动组件,所述第一防抖驱动组件用于在通电时驱动所述反射组件相对于所述透光部沿第一方向转动,所述第一方向的中心轴为第一中心轴,所述第一中心轴的延伸方向为所述透光部和所述反射件的排布方向;
所述潜望式摄像头具有第一回正状态和第一防抖状态,当所述潜望式摄像头处于所述第一回正状态时,所述第一回正件正对于所述第二回正件;当所述潜望式摄像头处于所述第一防抖状态时,所述第一回正件歪斜面对于所述第二回正件,且所述第一回正件受到所述第二回正件的磁吸作用,所述第一回正件可在所述第二回正件的磁吸作用下沿所述第一方向转动,以正对于所述第二回正件。
第二方面,本申请还提供一种电子设备,所述电子设备包括设备本体以及潜望式摄像头,所述潜望式摄像头安装于所述设备本体。
本申请提供的潜望式摄像头中设置了第一回正件和第二回正件,当潜望式摄像头处于第一防抖状态时,第一回正件歪斜面对于第二回正件,因而第二回正件会向第一回正件提供第一回正力矩。当第一防抖驱动组件断电时,第一回正力矩将驱动反射组件往第一方向转动,直至第一回正件和第二回正件正对。在第一回正件和第二回正件正对后,由于两者之间存在相互磁吸作用,反射组件始终维持在当前位置。因此,本申请提供的潜望式摄像头在第一防抖驱动组件断电后,潜望式摄像头可以维持在第一回正状态,使得反射件得以在第一方向上与透光部正对,从而克服或削弱了相关技术中反射件歪斜的问题。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本申请实施例提供的电子设备的示意图。
图2为图1所述的电子设备在另一视角的示意图。
图3为本申请实施例提供的潜望式摄像头的示意图。
图4为图3所示的潜望式摄像头沿A-A线的剖视图。
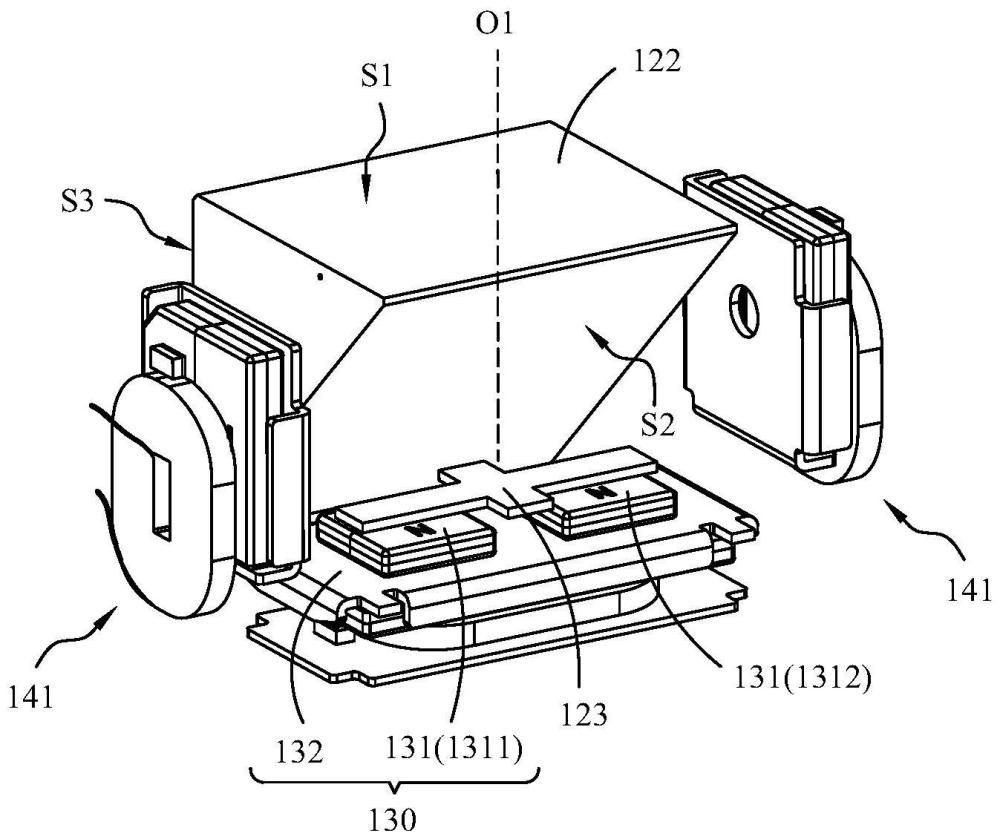
图5为本申请一实施例提供的潜望式摄像头中部分结构的示意图。
图6为图5中所示的潜望式摄像头在隐藏载体架后的示意图。
图7为图6所示的潜望式摄像头在另一视角的示意图。
图8为图5所示的潜望式摄像头中反射件和载体架的示意图。
图9为本申请实施例提供的第一回正件正对于第二回正件的示意图。
图10为本申请实施例提供的第一回正件歪斜面对于第二回正件的示意图。
图11为本申请实施例提供的第一回正件和第二回正件的相对位置关系图。
图12为图6所示的潜望式摄像头在另一视角的示意图。
图13为图5所示的潜望式摄像头在另一视角的示意图。
图14本申请实施例提供的反射件沿第一方向的转动角度与第一回正力矩的关系图。
图15为图6所示的潜望式摄像头在另一视角的示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本文中提及“实施例”或“实施方式”意味着,结合实施例或实施方式描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
请参照图1和图2,所述电子设备100包括设备本体20以及潜望式摄像头10,所述潜望式摄像头10安装于所述设备本体20。
所述电子设备100可以是手机、平板电脑、笔记本电脑、摄像装置、超级移动个人计算机(ultra-mobile personal computer,UMPC)、可穿戴设备(如智能手表、手环、VR设备等)、电视机、车载设备、电子阅读器等设备。本申请实施例仅以电子设备100为手机进行示例性说明,但不应视作为是对本申请的限制。
所述设备本体20是指电子设备100的主体部分,主体部分包括实现电子设备100主要功能的电子组件以及保护、承载这些电子组件的壳体110。以手机为例,设备本体20可以包括显示屏210、中框220、电池盖230,显示屏210和电池盖230均连接于中框220,且设置于中框220的相背两侧。
根据实际需求,摄像头模组可以显露于电子设备100的任意一侧,本申请对此不作限定。以手机为例,所述摄像头模组可以设置于手机的正面、背面、侧面。其中,所谓正面是指手机具备显示屏210的一侧;所谓背面是指手机具备电池盖230的一侧;所谓侧面是指手机的中框220的环周侧。可以理解的是,电子设备100的类型不同,其正面、背面、侧面等称呼的定义可能不同,对于其它类型的电子设备100在此不一一详述。
请参照图3和图4,本申请提供一种潜望式摄像头10,包括:壳体110、反射组件120、回正组件130、镜片组150、感光芯片160、驱动组件。其中,所述壳体110用于收容反射组件120、回正组件130、驱动组件。
请参照图3和图4,所述壳体110具有可以透过光线的透光部111。所述透光部111也可以称呼为透光窗口,外界光线可经过透光部111进入到壳体110内。透光部111的形状可以但不仅限于为圆形、椭圆形、三角形、矩形等。透光部111可以是指壳体110上的通孔,也可以是壳体110上可以透光的实体部位。
请参照图5至图7,所述反射组件120包括载体架121、反射件122、第一回正件123。所述反射件122和所述第一回正件123均承载于所述载体架121。所述反射件122与所述透光部111相对设置,且所述反射件122用于反射来自所述透光部111的光线。其中,反射件122可以但不仅限于为平面镜、三棱镜等,本申请仅以三棱镜进行示例性说明。需说明的是,载体架121、反射件122、第一回正件123三者同步运动。
请参照图3和图4,所述镜片组150与反射件122相对设置,感光芯片160设置在镜片组150背离反射件122的一侧。反射件122将来自透光部111的光线反射至镜片组150,镜片组150用于将光线聚焦于感光芯片160。感光芯片160用于接收光线,并将光信号转换为电信号。
其中,所述镜片组150包含多枚镜片,镜片的数量可以但不仅限于为2枚、3枚、4枚、5枚、6枚等,镜片的材质可以但不仅限于为透明玻璃、透明塑料。感光芯片160也可称之为感光元件、图像传感器、Sensor等。感光芯片160可以是电荷耦合器件(Charge CoupledDevice,CCD),也可以是互补金属氧化物导体器件(Complementary Metal OxideSemiconductor,CMOS)。
反射件122包括入射面S1、反射面S2、出射面S3。其中,入射面S1面对于透光部111,出射面S3面对于镜片组150,出射面S3用于反射光线。穿过透光部111的光线由入射面S1进入到反射件122内部,然后被反射面S2反射,光线被反射后,最后从出射面S3射出。
请参照图7,所述回正组件130包括第二回正件131,所述第二回正件131与所述第一回正件123相对设置且始终相互磁吸。
请参照图5至图7,所述驱动组件包括第一防抖驱动组件141,所述第一防抖驱动组件141用于在通电时驱动所述反射组件120相对于所述透光部111沿第一方向转动。也就是说,第一防抖驱动组件141用于驱动反射组件120转动,以对抖动进行位移补偿,从而在第一方向上实现防抖功能。其中,第一方向为转动方向,其存在正负之分,也就是说,反射组件120可以在第一方向上顺时针转动,也可以逆时针转动。所述第一方向的中心轴为第一中心轴O1,所述第一中心轴O1的延伸方向为所述透光部111和所述反射件122的排布方向(即透光部111与反射件122的相对方向)。
所述潜望式摄像头10具有第一回正状态和第一防抖状态,当所述潜望式摄像头10处于所述第一回正状态时,所述第一回正件123正对于所述第二回正件131。当所述潜望式摄像头10处于所述第一防抖状态时,所述第一回正件123歪斜面对于所述第二回正件131,且所述第二回正件131向所述第一回正件123提供第一回正力矩,以使所述第一回正件123正对于所述第二回正件131。也就是说,所述第一回正件123受到所述第二回正件131的磁吸作用,所述第一回正件123可在所述第二回正件131的磁吸作用下沿所述第一方向转动,以正对于所述第二回正件131。其中,第一回正力矩是指可以驱动反射组件120在第一方向上转动的力矩。
在本实施例中,当潜望式摄像头10处于第一回正状态时,反射件122与透光部111在第一方向上正对,此时的第一回正件123和第二回正件131也正对。当潜望式摄像头10处于第一防抖状态时,反射件122在第一方向上歪斜面对于透光部111,此时的第一回正件123也是歪斜面对于第二回正件131。通过第一防抖驱动组件141驱动反射组件120转动,可使得摄像头模组在第一回正状态和第一防抖状态之间切换。
假设当前潜望式摄像头10处于第一防抖状态,由于第一回正件123相对第二回正件131歪斜,因此,第一回正件123所受到的第二回正件131的磁吸力将形成第一回正力矩;若此时的第一防抖驱动组件141处于通电状态,那么,反射组件120在第一防抖驱动组件141的作用下可以维持在当前的位置,即第一回正件123可以维持在相对第二回正件131歪斜的位置;若此时的第一防抖驱动组件141处于断电状态,第一回正力矩将通过第一回正件123带动整个反射组件120转动,直至第一回正件123正对于第二回正件131,即潜望式摄像头10由第一防抖状态转变为第一回正状态,此时,第一回正力矩消失,反射组件120不再转动。当潜望式摄像头10处于第一回正状态时,第一回正件123和第二回正件131仍然相互磁吸,若此时的第一防抖驱动组件141处于断电状态,第一回正件123和第二回正件131之间的相互磁吸作用使得反射组件120得以维持在当前位置,即潜望式摄像头10能够维持在第一回正状态。
以用户的防抖拍摄场景示例性说明:当用户在使用电子设备100拍摄在一方向出现抖动时,此时,第一防抖驱动组件141驱动反射组件120沿第一方向的正方向转动,以对抖动进行位移补偿,反射组件120在转动过程中,第一回正件123相对第二回正件131逐渐歪斜,第一回正件123所受到的第一回正力矩逐渐增大,该第一回正力矩具有驱使反射组件120往第一方向的负方向转动的趋势。当用户结束拍摄关闭摄像头后,第一回正力矩驱动反射组件120往第一方向的负方向运动,直至第一回正件123和第二回正件131正对。在第一回正件123和第二回正件131正对后,由于两者之间存在相互磁吸作用,反射组件120始终维持在当前位置,即潜望式摄像头10能够维持在第一回正状态。同理,当用户在使用电子设备100拍摄在另一方向出现抖动时,此时,第一防抖驱动组件141驱动反射组件120沿第一方向的负方向转动,以对抖动进行位移补偿,反射组件120在转动过程中,第一回正件123相对第二回正件131逐渐歪斜,第一回正件123所受到的第一回正力矩逐渐增大,该第一回正力矩具有驱使反射组件120往第一方向的正方向转动的趋势。当用户结束拍摄关闭摄像头后,第一回正力矩驱动反射组件120往第一方向的正方向运动,直至第一回正件123和第二回正件131正对。在第一回正件123和第二回正件131正对后,由于两者之间存在相互磁吸作用,反射组件120始终维持在当前位置,即潜望式摄像头10能够维持在第一回正状态。
综上,本申请提供的潜望式摄像头10中设置了第一回正件123和第二回正件131,当潜望式摄像头10处于第一防抖状态时,第一回正件123歪斜面对于第二回正件131,因而第二回正件131会向第一回正件123提供第一回正力矩。当第一防抖驱动组件141断电时,第一回正力矩将驱动反射组件120往第一方向转动,直至第一回正件123和第二回正件131正对。在第一回正件123和第二回正件131正对后,由于两者之间存在相互磁吸作用,反射组件120始终维持在当前位置。因此,本申请提供的潜望式摄像头10在第一防抖驱动组件141断电后,潜望式摄像头10可以维持在第一回正状态,使得反射件122得以在第一方向上与透光部111正对,从而克服或削弱了相关技术中反射件122歪斜的问题。
请参照图7和图8,可选的,所述载体架121具有第一表面M1和第二表面M2,所述第一表面M1面对于所述透光部111,即第一表面M1为载体架121的顶面。所述第二表面M2背离所述第一表面M1,即第二表面M2为载体架121的底面。所述回正组件130面对于所述第二表面M2。换而言之,所述回正组件130设置在所述载体架121背离所述透光部111的一侧。进一步的,所述第一回正件123安装于载体架121具有第二表面M2的一侧。
进一步的,所述第一回正件123和所述第二回正件131中的至少一个为可产生磁场的磁体,且所述第一回正件123和所述第二回正件131相互磁吸。在一种实施方式中,所述第一回正件123为可产生磁场的磁体,所述第二回正件131为非磁体(比如铁、钢等)。在另一种实施方式中,所述第二回正件131为可产生磁场的磁体,所述第一回正件123为非磁体(比如铁、钢等)。在又一种实施方式中,所述第一回正件123和所述第二回正件131均为磁体。需说明的是,本申请所谓的磁体是指能够长期保持其磁性的磁性物体。本申请仅以第二回正件131为磁体,第一回正件123为非磁体进行示例性说明。
请参照图9,所述第二回正件131包括第一回正磁体1311、第二回正磁体1312。所述第一回正件123包括第一部分1231、中间部分1235、第二部分1232,所述第一部分1231和所述第二部分1232分别连接于所述中间部分1235的相背两侧,也就是说,第一部分1231、中间部分1235、第二部分1232依次相连,三者的连接形状大致为长条形。在反射组件120和镜片组150的相对方向上(以下简称为预设方向X),第一部分1231的尺寸小于第一回正磁体1311的尺寸,第二部分1232的尺寸小于第二回正磁体1312的尺寸。可选的,第一中心轴O1穿过中间部分1235。
当所述潜望式摄像头10处于所述第一回正状态时,所述第一部分1231正对于所述第一回正磁体1311,且所述第二部分1232正对于所述第二回正磁体1312。也就是说,第一部分1231面对于第一回正磁体1311在预设方向X上的中间部位,第二部分1232面对于第二回正磁体1312在预设方向X上的中间部位。
当所述潜望式摄像头10处于所述第一防抖状态时,所述第一部分1231歪斜面对于所述第一回正磁体1311,且所述第二部分1232歪斜面对于所述第二回正磁体1312。
请参照图9和图10,第一部分1231在预设方向X上将受到来自第一回正磁体1311的两个磁吸力:第一作用力F1、第二作用力F2,第一作用力F1、第二作用力F2的方向均平行于预设方向X且两者的方向相互背离。
请参照图9,当潜望式摄像头10处于第一回正状态时,由于第一部分1231正对于第一回正磁体1311,因此,第一作用力F1和第二作用力F2的大小相同,第一作用力F1和第二作用力F2的合力(下面将该合力简称为第一合力)则为零,第一合力所形成的第一力矩也就为零。
请参照图10,当潜望式摄像头10处于第一防抖状态时,由于第一部分1231歪斜面对于第一回正磁体1311,因此,第一作用力F1和第二作用力F2的大小不同,第一合力则不为零,第一力矩也不为零。
请参照图9和图10,第二部分1232在预设方向X上将受到来自第二回正磁体1312的两个磁吸力:第三作用力F3、第四作用力F4,第三作用力F3、第四作用力F4的方向均平行于预设方向X且两者的方向相互背离。
请参照图9,当潜望式摄像头10处于第一回正状态时,由于第二部分1232正对于第二回正磁体1312,因此,第三作用力F3和第四作用力F4的大小相同,第三作用力F3和第四作用力F4的合力(下面将该合力简称为第二合力)则为零,第二合力所形成的第二力矩也就为零。
请参照图10,当潜望式摄像头10处于第一防抖状态时,由于第二部分1232歪斜面对于第二回正磁体1312,因此,第三作用力F3和第四作用力F4的大小不同,第二合力则不为零,第二力矩也不为零。
进一步的,第一力矩和第二力矩的方向相同,且两者之和等于上述第一回正力矩。当潜望式摄像头10处于第一回正状态时,第一力矩和第二力矩均为零,因此第一回正力矩也为零。当潜望式摄像头10处于第一防抖状态时,第一力矩和第二力矩不为零,因此第一回正力矩也不为零。若驱动组件断电,不为零的第一回正力矩可以驱使反射组件120转动,使得第一回正件123和第二回正件131潜望式摄像头10回到第一回正状态。
请结合图9参照图10,所述第一回正件123还包括第三部分1233、第四部分1234,所述第三部分1233和所述第四部分1234分别连接于所述中间部分1235的相背两侧,且所述第一部分1231、第三部分1233、第二部分1232、第四部分1234沿所述第一方向上依次排布,第一回正件123整体呈“十”字形。第一回正件123可以为对称结构,这样有利于设计,也有利于磁吸平衡。
其中,所述第三部分1233位于所述第一回正磁体1311和所述第二回正磁体1312之间,且所述第一回正磁体1311和所述第二回正磁体1312分别对所述第三部分1233的磁吸作用的方向相反,也就是说,第一回正磁体1311和第二回正磁体1312均磁吸第三部分1233,并且,第三部分1233所受到的第一回正磁体1311的磁吸力的方向和第三部分1233所受到的第二回正磁体1312的磁吸力的方向相互背离。
其中,所述第四部分1234位于所述第一回正磁体1311和所述第二回正磁体1312之间,且所述第一回正磁体1311和所述第二回正磁体1312分别对所述第四部分1234的磁吸作用的方向相反,也就是说,第一回正磁体1311和第二回正磁体1312均磁吸第四部分1234,并且,第四部分1234所受到的第一回正磁体1311的磁吸力的方向和第四部分1234所受到的第二回正磁体1312的磁吸力的方向相互背离。
第三部分1233的所受合力可以形成第三力矩,第四部分1234的所受合力可以形成第四力矩。第一力矩、第二力矩、第三力矩、第四力矩的方向相同,四者之和等于第一回正力矩。可以理解的是,在第一部分1231和第二部分1232的基础上设置了第三部分1233、第四部分1234后,第一回正力矩可以更大,当第一回正件123相对第二回正件131歪斜时,更大的第一回正力矩更有利于驱动第一回正件123自动与第二回正件131正对,这也说明了第一回正件123和第二回正件131正对后,第一回正件123更不容易歪斜。
请参照图9和图10,所述第一回正磁体1311和所述第二回正磁体1312间隔设置。第一中心轴O1位于第一回正磁体1311和第二回正磁体1312之间。可以理解的是,将第一回正磁体1311和第二回正磁体1312间隔设置可以增加第一回正磁体1311和第一中心轴O1之间的距离,从而增大上述第一力矩,同样,也可以增加第二回正磁体1312和第一中心轴O1之间的距离,从而增大上述第二力矩,最终使得第一回正力矩增大。当然,将第一回正磁体1311和第二回正磁体1312间隔设置也可以节省材料,降低成本。
可选的,在反射件122朝向透光部111的方向上,所述第一回正磁体1311的极性排布方向与所述第二回正磁体1312的极性排布方向相同。在一种实施方式中,第一回正磁体1311的N极和第二回正磁体1312的N极均朝向透光部111,且第一回正磁体1311的S极和第二回正磁体1312的S极均背离透光部111。在另一种实施方式中,第一回正磁体1311的S极和第二回正磁体1312的S极均朝向透光部111,且第一回正磁体1311的N极和第二回正磁体1312的N极均背离透光部111。
将“第一回正磁体1311的极性排布方向与第二回正磁体1312的极性排布方向”设置为相同,这样会减小第一回正磁体1311和第二回正磁体1312的相互磁吸作用,从而使得第一回正磁体1311和第一回正件123之间,以及第二回正磁体1312和第一回正件123之间具有较大的磁吸作用,这样有利于潜望式摄像头10由第一防抖状态自主转变为第一回正状态的过程,也有利于潜望式摄像头10始终保持第一回正状态。
以反向角度进行说明,若第一回正磁体1311的极性排布方向与第二回正磁体1312的极性排布方向相反,例如,第一回正磁体1311的N极朝向透光部111且第二回正磁体1312的S极均朝向透光部111,这样会使得第一回正磁体1311的N极和第二回正磁体1312的S极距离更为靠近,那么,第一回正磁体1311的N极和第二回正磁体1312的S极将形成至少部分封闭磁力线,即至少部分磁力线由第一回正磁体1311的N极出发,最后到达第二回正磁体1312的S极。具体来讲,由第一回正磁体1311的N极出发的磁力线,一部分到达第一回正磁体1311的S极,一部分到达第二回正磁体1312的S极,剩余部分才到达第一回正件123。同理,由第二回正磁体1312的N极出发的磁力线,一部分到达第二回正磁体1312的S极,一部分到达第一回正磁体1311的S极,剩余部分才到达第一回正件123。换而言之,在设置为“第一回正磁体1311的N极朝向透光部111且第二回正磁体1312的S极均朝向透光部111”之后,第一回正磁体1311和第二回正磁体1312之间的相互磁吸作用会加强,而第一回正磁体1311与第一回正件123的磁吸作用则会减弱,第二回正磁体1312与第一回正件123的磁吸作用也会减弱,上述第一回正力矩则会减小,这样不利于潜望式摄像头10由第一防抖状态自主转变为第一回正状态,也不利于潜望式摄像头10始终保持第一回正状态。
请参照图11,在反射件122与透光部111的相对方向上,所述第一回正件123和所述第二回正件131始终相互间隔。也就是说,不论潜望式摄像头10处于第一回正状态还是第一防抖状态,第一回正件123和第二回正件131始终保持间隔,可以理解的是,第一回正件123和第二回正件131保持间隔,从而避免了反射组件120在相对回正组件130转动的过程中,第一回正件123和第二回正件131产生摩擦。
请参照图12和图13,所述第一防抖驱动组件141包括第一磁体1411及第一线圈1412。所述第一磁体1411连接于所述反射组件120。所述第一线圈1412与所述第一磁体1411相对且间隔设置。所述第一线圈1412用于在通电时产生对所述第一磁体1411产生磁性作用,以通过所述第一磁体1411带动所述载体架121围绕所述第一中心轴O1转动。
在本实施例中,第一防抖驱动组件141的数量可以为一个、两个、三个等,本申请以两个进行示例(即两个第一线圈1412,两个第一磁体1411)。所述载体架121还具有相背设置的第三表面M3和第四表面M4,第三表面M3和第四表面M4为载体架121的侧面。两个第一磁体1411中的一个第一磁体1411固定在载体架121具有第三表面M3的一侧,另一个第一磁体1411固定在载体架121具有第四表面M4的一侧。每个第一磁体1411配对设置一个第一线圈1412,且第一线圈1412和第一磁体1411间隔相对设置。两个第一防抖驱动组件141共同驱动反射组件120绕第一中心轴O1转动。由于第一磁体1411固定于反射组件120,因此,当反射组件120转动时,第一磁体1411也将跟随反射组件120转动。第一线圈1412可以直接或间接的固定在壳体110上,当反射组件120转动时,第一线圈1412不会跟随转动。
请参照图12,所述第一防抖驱动组件141还包括第一隔离件1413,所述第一隔离件1413至少部分设置于所述第一磁体1411靠近所述第一回正件123或所述第二回正件131的一侧。其中,第一隔离件1413为可以被磁体吸附的物体,其材质可以但不仅限于为钢、铁等。由于第一回正件123和第二回正件131相邻设置,因而将第一隔离件1413设置在第一磁体1411和第一回正件123之间,则意味着第一隔离件1413也将位于第一磁体1411和第二回正件131之间。第一隔离件1413可以隔离磁场,使得第一磁体1411的磁场和第一回正件123的磁场不会相互影响,以及使得第一磁体1411和第二回正件131的磁场不会相互影响,从而确保反射件122和透光部111的正对效果较好。两个第一隔离件1413中的一个第一隔离件1413可以固定在载体架121具有第三表面M3的一侧,另一个第一隔离件1413固定在载体架121具有第四表面M4的一侧。第一磁体1411可以固定在第一隔离件1413上。
请参照图14,图14为反射件122沿第一方向的转动角度与第一回正力矩的关系图。在图14中,横坐标代表反射件122沿第一方向的转动角度,纵坐标代表第一回正力矩的大小,单位为mN.mm。可以看出,第一回正力矩随着反射件122的转动角度线性分布,当反射件122的旋转角度越大时,第一回正力矩越大;当反射件122的旋转角度越小时,第一回正力矩越小;当反射件122的旋转角度为0°,第一回正力矩接近于0mN*mm。由于产品存在制造、装配等误差,因而,图中所示的线条未经过坐标原点。需说明的是,图14中的坐标正负仅代表方向不同,并非代表数值大小。
请参照图12和图15,所述驱动组件还包括第二防抖驱动组件142,所述第二防抖驱动组件142包括第二磁体1421和第二线圈1422。所述第二磁体1421连接于所述回正组件130。所述第二线圈1422与所述第二磁体1421相对且间隔设置。所述第二线圈1422用于在通电时对所述第二磁体1421产生磁性作用,以通过所述第二磁体1421带动所述回正组件130和所述反射组件120沿第二方向转动。也就是说,第二防抖驱动组件142用于驱动反射组件120转动,以对抖动进行位移补偿,从而在第二方向上实现防抖功能。其中,第二方向为转动方向,其存在正负之分,也就是说,反射组件120可以在第二方向上顺时针转动,也可以逆时针转动。所述第二方向的中心轴为第二中心轴O2,所述第二中心轴O2与所述第一中心轴O1不平行。第一中心轴O1和第二中心轴O2可以相互垂直。在本申请中,第二中心轴O2的延伸方向为第三表面M3和第四表面M4的相对方向。
需说明的是,第二防抖驱动组件142是通过驱动回正组件130来带动反射组件120运动,也就是说,当第二防抖驱动组件142通电驱动时,回正组件130和反射组件120都沿第二方向转动。由于第二磁体1421固定在回正组件130上,当回正组件130转动时,第二磁体1421将跟随回正组件130运动。第二线圈1422可以直接或间接的固定在壳体110上,当回正组件130转动时,第二线圈1422不会跟随转动。
请参照图12和图15,所述回正组件130还包括第二隔离件132,所述第二隔离件132设置于所述第二回正件131和所述第二磁体1421之间。第二隔离件132为可以被磁体吸附的物体,其材质可以但不仅限于为钢、铁等。将第二隔离件132设置于第二回正件131和第二磁体1421之间,从而可以使得第二磁体1421的磁场和第二回正件131的磁场不会相互影响,进而确保反射件122和透光部111的正对效果较好。
请参照图12和图15,所述潜望式摄像头10还包括第三回正件170,所述第三回正件170设置于所述第二线圈1422背离所述第二磁体1421的一侧。第三回正件170可以直接或间接的固定在壳体110上。第二线圈1422可以直接或间接的固定在第三回正件170上,且第二线圈1422位于第三回正件170面对第二磁体1421的一侧。所述第三回正件170与所述第二磁体1421相对设置且相互磁吸。第三回正件170的材料可以但不仅限于为钢、铁等,当然,第三回正件170也可以是可产生磁场的磁体。
所述潜望式摄像头10具有第二回正状态和第二防抖状态,当所述潜望式摄像头10处于所述第二回正状态时,所述第二磁体1421正对于所述第三回正件170。当所述潜望式摄像头10处于所述第二防抖状态时,所述第二磁体1421歪斜面对于所述第三回正件170,且所述第三回正件170向所述第二磁体1421提供第二回正力矩,以使所述第二磁体1421正对于所述第三回正件170。也就是说,所述第二磁体1421磁吸所述第三回正件170,所述第二磁体1421可通过磁吸所述第三回正件170而沿所述第二方向转动,以正对于所述第三回正件170。
在本实施例中,当潜望式摄像头10处于第二回正状态时,反射件122与透光部111在第二方向上正对,此时的第二磁体1421和第三回正件170也正对。当潜望式摄像头10处于第二防抖状态时,反射件122在第二方向上歪斜面对于透光部111,此时的第二磁体1421也是歪斜面对于第三回正件170。通过第二防抖驱动组件142驱动反射组件120转动,可使得摄像头模组在第二回正状态和第二防抖状态之间切换。
假设当前潜望式摄像头10处于第二防抖状态,由于第二磁体1421相对第三回正件170歪斜,因此,第二磁体1421所受到的第三回正件170的磁吸力将形成第二回正力矩;若此时的第二防抖驱动组件142处于通电状态,那么,反射组件120在第二防抖驱动组件142的作用下可以维持在当前的位置,即第二磁体1421可以维持在相对第三回正件170歪斜的位置;若此时的第二防抖驱动组件142处于断电状态,第二回正力矩将通过第二磁体1421带动整个反射组件120转动,直至第二磁体1421正对于第三回正件170,即潜望式摄像头10由第二防抖状态转变为第二回正状态,此时,第二回正力矩消失,反射组件120不再转动。当潜望式摄像头10处于第二回正状态时,第二磁体1421和第三回正件170仍然相互磁吸,若此时的第二防抖驱动组件142处于断电状态,第二磁体1421和第三回正件170之间的相互磁吸作用使得反射组件120得以维持在当前位置,即潜望式摄像头10能够维持在第二回正状态。
以用户的防抖拍摄场景示例性说明:当用户在使用电子设备100拍摄在一方向出现抖动时,此时,第二防抖驱动组件142驱动反射组件120沿第二方向的正方向转动,以对抖动进行位移补偿,反射组件120在转动过程中,第二磁体1421相对第三回正件170逐渐歪斜,第二磁体1421所受到的第二回正力矩逐渐增大,该第二回正力矩具有驱使反射组件120往第二方向的负方向转动的趋势。当用户结束拍摄关闭摄像头后,第二回正力矩驱动反射组件120往第二方向的负方向运动,直至第二磁体1421和第三回正件170正对。在第二磁体1421和第三回正件170正对后,由于两者之间存在相互磁吸作用,反射组件120始终维持在当前位置,即潜望式摄像头10能够维持在第二回正状态。同理,当用户在使用电子设备100拍摄在另一方向出现抖动时,此时,第二防抖驱动组件142驱动反射组件120沿第二方向的负方向转动,以对抖动进行位移补偿,反射组件120在转动过程中,第二磁体1421相对第三回正件170逐渐歪斜,第二磁体1421所受到的第二回正力矩逐渐增大,该第二回正力矩具有驱使反射组件120往第二方向的正方向转动的趋势。当用户结束拍摄关闭摄像头后,第二回正力矩驱动反射组件120往第二方向的正方向运动,直至第二磁体1421和第三回正件170正对。在第二磁体1421和第三回正件170正对后,由于两者之间存在相互磁吸作用,反射组件120始终维持在当前位置,即潜望式摄像头10能够维持在第二回正状态。
当潜望式摄像头10同时处于第一回正状态和第二回正状态时,反射件122与透光部111在第一方向和第二方向上都正对。当潜望式摄像头10同时处于第一防抖状态和第二防抖状态时,反射件122在第一方向和第二方向上都歪斜面对于透光部111。在本申请中,通过以上所述的结构,当第一防抖驱动组件141和第二防抖驱动组件142都断电后,在第一回正力矩和第二回正力矩的作用下,潜望式摄像头10最终将同时处于第一回正状态和第二回正状态,并且保持在第一回正状态和第二回正状态。
尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替换和变型,这些改进和润饰也视为本申请的保护范围。
- 一种电子设备、摄像头及摄像头遮挡机构
- 一种电子设备、摄像头及摄像头遮挡机构
- 摄像头组件及电子设备
- 摄像头模组、电子设备及拍摄方法
- 音圈马达、潜望式透镜驱动装置及具有摄像头的电子设备
- 潜望式摄像头及电子设备