生成用于补偿侵入式采样的混合传感器
文献发布时间:2023-06-19 19:20:08
背景技术
本申请总体上涉及计算机和计算机应用,并且更具体地涉及例如在诸如工程、制造和/或另一工业或工业过程的过程工业中生成混合传感器。
在石油、化学品和食品过程工程等中,操作的健康取决于物理变量(例如压力、温度和流速)和工程过程中的化学组分和/或浓度的完全连续监视。随着传感器在工程过程中的部署,实现这样的过程工程的系统可以监视这样的物理变量。但是,这样的监视可能需要依赖于侵入式的采样方式,并且可能涉及时间延迟,直到传感器数据的结果是已知的。例如,工业过程的液体流中的化学分析的监视依赖于实验室中的侵入式手动取样和离线完成。这种侵入式手动取样和实验室分析可能引起潜在问题,诸如可以被实际取样的样品数目数量的减少和知道流的当前化学组分的滞后。这两个问题导致错过为高生产率调整工程处理的机会的更高的可能性。
发明内容
可以提供例如在工业处理中生成混合传感器的系统和方法。在一方面,系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。
在另一方面中,一种系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。硬件处理器可进一步被配置为创建因果关系数据结构,该因果关系数据结构在时间上将上游传感器数据的第一时间序列与测量的目标变量数据的时间序列进行前向链接,在时间上将下游传感器数据的第二时间序列与测量的目标变量数据的时间序列进行后向链接。
另一方面,系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。硬件处理器可进一步被配置为创建因果关系数据结构,该因果关系数据结构在时间上将上游传感器数据的第一时间序列与测量的目标变量数据的时间序列进行前向链接,在时间上将下游传感器数据的第二时间序列与测量的目标变量数据的时间序列进行后向链接。可基于因果关系数据结构来选择上游传感器数据和下游传感器数据。
在另一方面,系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。经训练的神经网络可以估计在给定时间的目标变量的值。基于针对给定时间估计的目标变量的值,硬件处理器还可以控制工业过程中的设定点。
在另一方面中,一种系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。经训练的机器学习模型(诸如神经网络)可以估计在给定时间的目标变量的值。基于针对给定时间估计的目标变量的值,硬件处理器可以进一步控制工业过程中的设定点。该工业过程可以包括油砂处理,并且该目标变量可以包括与油砂处理的尾矿相关联的特性。
在另一方面中,一种系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。诸如神经网络的机器学习模型可以包括以下各项的聚合:第一神经网络,被训练为基于上游传感器数据的前向依赖的第一时间序列预测目标变量的值;第二神经网络,被训练为基于下游传感器数据的后向依赖的第二时间序列预测目标变量的值;以及第三神经网络,被训练为基于测量的目标变量数据的时间序列预测目标变量的值。
在另一方面中,一种系统可包括硬件处理器。存储设备可以与硬件处理器耦合。硬件处理器可被配置为接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。硬件处理器还可以被配置为接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。所述硬件处理器还可被配置为接收与所述目标变量相关联的测量的目标变量数据的时间序列,所述目标变量具有比与所述上游传感器数据和所述下游传感器数据相关联的测量频率低的测量频率。所述硬件处理器还可被配置为确定表示所述上游传感器数据与所述目标变量之间的所述前向依赖性的滞后的第一时间窗口。所述硬件处理器还可被配置为确定表示所述下游传感器数据与所述目标变量之间的所述后向依赖的滞后的第二时间窗口。所述硬件处理器还可以被配置成用于基于训练数据集来训练机器学习模型(如神经网络),所述训练数据集至少包括所述第一时间窗口中的上游传感器数据的所述第一时间序列、所述第二时间窗口中的下游传感器数据的所述第二时间序列、以及测量的目标变量数据的所述时间序列,以估计所述目标变量在给定时间的值。诸如神经网络的机器学习模型可以包括以下各项的聚合:第一神经网络,被训练为基于上游传感器数据的前向依赖的第一时间序列预测目标变量的值;第二神经网络,被训练为基于下游传感器数据的后向依赖的第二时间序列预测目标变量的值;以及第三神经网络,被训练为基于测量的目标变量数据的时间序列预测目标变量的值。测量的目标变量的报告时间可具有距目标变量的收获时间的延迟,并且包括测量的目标变量数据的时间序列的训练数据集可包括在转移到测量的目标变量的相应收获时间的报告时间确定的测量的目标变量的数据。机器学习模型(诸如神经网络)在给定时间在运行时可以估计目标变量的值而没有延迟。
在一个方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。
在另一方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。该方法还可包括创建因果关系数据结构,该因果关系数据结构在时间上将上游传感器数据的第一时间序列与测量的目标变量数据的时间序列进行前向链接,并且在时间上将下游传感器数据的第二时间序列与测量的目标变量数据的时间序列进行后向链接。
在又一方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。该方法还可包括创建因果关系数据结构,该因果关系数据结构在时间上将上游传感器数据的第一时间序列与测量的目标变量数据的时间序列进行前向链接,并且在时间上将下游传感器数据的第二时间序列与测量的目标变量数据的时间序列进行后向链接。可基于因果关系数据结构来选择上游传感器数据和下游传感器数据。
在另一方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。经训练的机器学习模型(诸如神经网络)可以估计在给定时间的目标变量的值。基于针对给定时间估计的目标变量的值,硬件处理器还可以控制工业过程中的设定点。
在另一方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。经训练的机器学习模型(诸如神经网络)可以估计在给定时间的目标变量的值。基于针对给定时间估计的目标变量的值,硬件处理器可以进一步控制工业过程中的设定点。该工业过程可以包括油砂处理,并且该目标变量包括与尾矿相关联的特性。
在另一方面,一种在工业处理中生成混合传感器的方法可包括接收对目标变量具有前向依赖性的第一时间序列的上游传感器数据。该方法还可以包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。该方法还可以包括接收与目标变量相关联的测量的目标变量数据的时间序列,目标变量具有比与上游传感器数据和下游传感器数据相关联的测量频率更低的测量频率。该方法还可包括确定第一时间窗口,该第一时间窗口表示上游传感器数据与目标变量之间的前向依赖性的滞后。该方法还可包括确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。该方法还可以包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗口中的上游传感器数据的第一时间序列、第二时间窗口中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。诸如神经网络的机器学习模型可以包括以下各项的聚合:第一神经网络,被训练为基于上游传感器数据的前向依赖的第一时间序列预测目标变量的值;第二神经网络,被训练为基于下游传感器数据的后向依赖的第二时间序列预测目标变量的值、以及第三神经网络,被训练为基于测量的目标变量数据的时间序列预测目标变量的值。
在本文所公开的系统和/或方法的一个或多个方面,上游传感器数据的第一时间序列可以是一维或多维时间序列数据。在本文所公开的系统和/或方法的一个或多个方面,下游传感器数据的第二时间序列可以是一维或多维时间序列数据。在本文公开的系统和/或方法的一个或多个方面,机器学习模型可以是神经网络或神经网络模型。
还可提供存储可由机器执行以执行本文描述的一或多个方法的指令程序的计算机可读存储媒质。
下面参考附图详细描述各种实施例的其他特征以及结构和操作。在附图中,相同的附图标记表示相同或功能相似的元件。
附图说明
图1是示出了实施例中的系统在实现混合传感器时可以操作的时序图和不同的测量结果集合的示图。
图2是示出了在一个实施例中作为示例工业过程的油砂工业的尾矿(tailing)采样的示图。
图3是示出了实施例中的沙油尾矿示例中的相关度量的示图。
图4示出了说明在实施例中获取不同传感器数据集合的不同频率的另一示图。
图5是示出实施例中的系统组件的示图。
图6示出了实施例中的因果处理图(因果关系图)。
图7是示出了与在实施例中用于估计目标传感器值的数据源相关联的时间范围的另一示图。
图8是示出了实施例中用于前向和后向推断关系的动态图的示图。
图9是示出在实施例中确定一个或多个隐藏传感器值时的上游变量、目标变量和下游变量的处理流程的示图。
图10是图示可被训练成在给定时间点估计目标变量的实施例中的神经网络架构的示图。
图11是示出实施例中的方法的流程图。
图12是示出了实施例中的方法的另一流程图。
图13是示出一个实施例中的系统的部件的示图,在一个实施例中,该系统可生成混合传感器。
图14示出了在一个实施例中可实现混合传感器系统的示例性计算机或处理系统的示意图。
具体实施例
在一方面,公开了一种可生成混合传感器的系统、装置和方法。例如,所述系统、装置和方法可以产生混合传感器,以在诸如制造、工程、化学和其他工业过程的工业过程中使用来自非侵入式传感器的相关高频采样来补偿昂贵的侵入式采样。在一个方面,在一个实施例中,混合传感器可以对现有的一个或多个传感器设备或手动采样提供技术改进,其不能用于以相对高的频率(例如,以获得传感器数据的期望速率)测量结果数据。
例如,可以生成混合传感器的系统可以包括计算机实现的组件,例如,在一个或多个处理器或硬件处理器上实现和/或运行,或者与一个或多个硬件处理器耦合。生成混合传感器的方法可在这样的一个或多个处理器或硬件处理器上执行和/或运行。例如,一个或多个硬件处理器可以包括诸如可编程逻辑设备、微控制器、存储器设备和/或其他硬件组件之类的组件,这些组件可以被配置为执行本公开中所描述的相应任务。耦合的存储器设备可以被配置为选择性地存储可由一个或多个硬件处理器执行的指令。
处理器可以是中央处理单元(CPU)、图形处理单元(GPU)、现场可编程门阵列(FPGA)、专用集成电路(ASIC)、另一合适的处理组件或设备、或其一个或多个组合。所述处理器可以与存储器设备耦合。存储器设备可包括随机存取存储器(RAM)、只读存储器(ROM)或另一存储器设备,并且可存储用于实现与本文描述的方法和/或系统相关联的不同功能的数据和/或处理器指令。处理器可以执行存储在存储器中或者从另一计算机设备或介质接收的计算机指令。
随着传感器在工程过程或另一工业过程中的部署,实施例中的系统可以用传感设备连续地监视物理变量,例如以间隔(例如,以固定间隔)的高频、非侵入性、在线采样。在另一方面中,系统可接收或获得连续监视的物理变量。
在一个实施例中,该系统可以生成混合传感器,该混合传感器可以估计落在任何两个连续目标变量测量结果之间的未测量空间中的目标数量,这两个连续目标变量测量结果被视为远离的(例如,相隔相对长的插入持续时间)。在一个实施例中,系统可创建因果关系图或数据结构来得到混合传感器,该混合传感器以利用因果关系图或数据结构的方式来融合来自多个源的信号。混合传感器可以被实现用于各种处理和制造工业,例如,其中组成、纯度或任何质量相关的数量或变量是所讨论的目标变量。该系统可得到对数量的及时且准确的预测,该预测例如先前已在期望频率处不可用。混合传感器可以提供目标数量的更精细分辨率和更早可用性,从而允许更好的主动动作和/或决策。例如,基于预测的未观测的目标数量,系统可以自动地或自主地控制一个或多个设定点,例如,在工业过程中自动地或自主地改变一个或多个设定点。
图1是示出了实施例中的系统在实现混合传感器时可以操作的时序图和不同的测量结果集合的示图。在实施例中,该系统可以用不同类型或测量结果集合来操作。测量结果提供变量或数量,例如,诸如温度、压力、组分的量、和/或其他。上游测量结果集合可以由一个或多个传感器以在线感测的相对高频率(例如,每5分钟)测量或以另一时间间隔(其可以是固定间隔)测量。例如,一个或多个传感器实时或接近实时地测量上游数据。上游测量的时间序列显示为图1中的一系列椭圆。可以存在多个不同的下游测量结果集合。下游测量结果集合可以由一个或多个传感器以相对高的频率测量,该频率也是在线感测,例如每5分钟或可以是固定间隔的另一时间间隔。例如,一个或多个传感器实时或接近实时地测量下游数据。下游测量结果的时间序列示出为图1中的一系列‘x’。对应目标变量或数量的目标测量结果(其可以由一个或多个传感器测量或基于分析确定)仅在比上游测量结果集合和下游测量结果集合更慢或更低的频率(例如,每12小时)下可用。随时间进行的目标测量结果的时间序列显示为图1中的一系列菱形。
在实施例中,因果关系图驱动的基于模型的混合传感器可以在任何时间“t”102推断未观察到的目标变量110,其中系统对来自三个来源的证据(测量的传感器数据)进行操作:上游经精细测量的协变量104,例如,表示来自时间“t”102之前的时间窗口(例如,来自时间“t”102之前的即时左侧时间间隔)的传感器测量结果,下游经精细测量的协变量106,例如,表示来自时间“t”102之后的时间窗口(例如,来自时间“t”102之后的即时右侧时间间隔)的传感器测量结果,以及针对目标变量108的最近可用测量结果。上游测量结果测量上游材料或条件,例如输入到工业过程中的原料;下游测量结果测量下游材料或条件,例如在该过程中产生的副产物、中间产物、生产的、和/或操作条件。在一个实施例中,因果关系图驱动的基于模型的混合传感器可被实现为神经网络架构,其中神经网络被训练或运行以预测例如两个被观测目标变量108、112之间的未被观测目标变量110。
简要地,人工神经网络(ANN)或神经网络(NN)是机器学习模型,可以训练该模型以预测或分类输入数据。人工神经网络可包括一连串的神经元层,这些神经元层被互连以使得一层中的神经元的输出信号被加权并被传送给下一层中的神经元。给定层中的神经元Ni可以连接到下一层中的一个或多个神经元Nj,并且不同的权重wij可以与每个神经元-神经元连接Ni-Nj相关联,用于对从Ni传输到Nj的信号进行加权。神经元Nj依赖于其累加的输入来生成输出信号,并且加权信号可以在网络的连续层上从输入传播到输出神经元层。人工神经网络机器学习模型可以经历训练阶段,在该训练阶段中确定与相应神经元层相关联的权重集合。在迭代训练方案中,网络暴露于一组训练数据,其中,随着网络“学习”训练数据,权重被重复更新。具有经由训练操作定义的权重的所产生的经训练的模型可以被应用以基于新数据执行任务。
例如,工业过程可以包括一个或多个传感器,这些传感器测量相应的一个或多个变量或数量,这些变量或数量是设定的或输入的。工业方法的实例可以是油砂过程,该过程可以包括从油砂矿床提取沥青,这可以导致稀释的沥青;沥青提升,这可以导致合成的原油;以及原油精炼,它可以生产最终产物,例如汽油、柴油、润滑剂、以及沥青。在此类工业加工过程中,进行测量或采样以监视该过程以及所生产的中间产品和/或最终产品的质量。然而,获得这些测量结果中的一些测量结果可以是侵入性的,并且在期望频率处可能不可用。在另一方面,需要实验室处理的样品可导致获得测量结果的延迟,例如,取决于实验室处理的速度。在实施例中,混合传感器可以例如近实时地测量或预测这种未观测的测量,并且可以允许对校正在过程中检测到的可能问题的更快响应和/或提高在过程中产生的中间产品和/或最终产品的质量。
图2是示出在一个实施例中作为示例工业过程的油砂工业的尾矿采样的示图。可以每天进行两次尾矿采样分析。尾矿是水、砂、粘土和残余沥青的混合物,并且是用于将沥青与砂和粘土分离的热水处理过程204的副产物。尾矿储存在称为尾矿池202的大型工程坝和堤坝系统中。尾矿池202是使得能够将处理过的水分离并且连续地再循环的沉降池。水从尾矿池连续地再循环回到提取过程中,从而减少来自河流和其他来源的淡水的使用。油砂生产者循环使用78%-86%的水。尾矿可具有环境以及产品结果影响。尾矿组成与高采样频率、(在线)非侵入式传感器(例如,每5分钟测量的)206相关,这些传感器对应于上游的变量,如原料以及下游测量结果或对应于由热水处理(主要处理后)产生的下游材料的传感器值208。实施例中的混合传感器可测量尾矿,例如在所观察的采样之间(例如,在样品分析之间),并且可提供对尾矿210的连续测量结果。
图3是示出了实施例中的沙油尾矿示例中的相关度量的示图。在沥青主要处理方法304中,用热水处理原材料302。各种传感器测量上游传感器数据或度量,诸如原材料含量测量结果、和流入和过程变量310。热水处理方法产生尾矿(副产物)306。浙青混合物的剩余部分(除尾矿外)用浙青次要处理(例如离心308)处理。在热水处理304之后,各种传感器还测量下游传感器数据或度量,诸如后处理含量测量结果和流出变量312。在此示例中,目标变量314可以是与尾矿样本相关联的测量结果,例如作为热处理过程的副产物(或中间变量)产生的尾矿样本的含量。这种测量结果通常以比上游传感器度量310和下游传感器度量312更低的频率进行,并且可能招致昂贵的侵入式采样,例如离线采样,例如实验室分析。上游传感器度量310和下游传感器度量312都是高频采样非侵入式传感器度量,例如,以比目标变量采样更高的频率采样。
图4示出了说明在实施例中获取不同传感器数据集合的不同频率的另一示图。上游传感器度量402可以固定的时间间隔获取,例如以第一频率获取。下游传感器度量404可以以另一固定时间间隔(例如,以第二频率)取得。期望估计其未观测或未测量的值的目标变量406可以是以比第一频率和第二频率低的频率而被测量的变量或数量。
在实施例中,该系统和/或方法将实际监视的较小频率值与估计的较高频率值组合以生成混合传感器。混合传感器允许推断和存储具有侵入式、低频测量结果的变量的值;否则,以与高频、非侵入式测量结果大数据分析相当的更高速率。在精细频率处的测量结果的可比较和一致的可用性使得能够更好地进行数据驱动的决策和控制用于以可接受质量的最佳恢复和产量的过程。在实施例中,混合传感器可以允许在例如由于累积效应而发生潜在灾难或灾难之前检测可能的环境侵犯。在另一方面,混合传感器可以允许更早地标识昂贵或经济原材料的任何大量损失。
图5是示出实施例中的系统组件的示图。所示出的组件包括计算机实现的组件,例如,如上所述的执行计算机过程和/或线程的一个或多个处理器或硬件处理器。在一个实施例中,该系统可在标识针对混合传感器的一个或多个隐藏值时,使用下游(例如,精细)测量结果,来利用时间上后向的推断,使用上游(例如,精细)测量结果和过去自身(例如,粗略)测量结果来利用时间上前向的推断。例如,存储设备502可存储历史数据,其包括上游测量结果(或度量)数据(诸如传感器测量结果数据)、下游测量结果(或度量)数据(诸如传感器测量结果数据)和混合传感器数据。如上所述,上游测量结果数据可以包括与过程(例如,工业、工程、化学过程)中的输入材料和/或条件相关联的数据。下游测量结果数据可以包括与由输入材料和/或条件的处理所引起的对过程的影响相关联的数据。混合传感器数据可以包括与过程的变量或属性相关联的数据,对于该过程,混合传感器估计在时间点(例如,在实际测量的度量的时间之间)的未观察到的值。混合传感器数据可以包括变量或属性的历史实际测量结果数据,并且还可以包括先前估计的值。上游数据和下游数据可以通过在工业处理(如物理或化学处理)中实时地执行高频采样(例如,比混合传感器数据更高的频率)的传感器来获得或收集。所采集的传感器结果可以例如瞬时地、实时地或接近实时地被存储回储存库(例如,存储设备502)。
计算机处理器例如可接收或获得(直接或间接地)例如来自存储这样的历史数据库的存储设备502的上游数据504、下游数据508和混合传感器数据506。计算机处理器还可接收估计的时间点。在实施例中,确定估计的时间点之前的时间窗口和估计的时间点之后的时间窗口。在后续处理中,可以使用在估计的时间点之前的时间窗口内测量的上游数据,并且可以使用在估计的时间之后的时间窗口内测量的下游数据。为了简化解释,在估计的时间点之前的时间窗口也被称为第一时间窗口。为了简化解释,在估计的时间点之后的时间窗也被称为第二时间窗。在实施例中,所接收的数据可以是在那些时间窗口内的数据。
在510处,计算机处理器可建立内部存储器内数据结构(例如,因果性图或因果处理图),其表示测量结果(例如,上游和下游度量)之间的因果性或关系。因果性图或因果处理图(也称为定性因果图)可包括特定上游和下游变量名称和/或标识:该信息可作为输入来接收。在实施例中,510处所示的框包括数据结构,该数据结构以对应的图数据结构的形式捕获该定性信息,该对应的图数据结构还与针对这些变量(即难以感测/测量的所讨论的质量变量,其值是使用在本文所披露的方法的实施例来通过利用该定性图、具有时间序列测量的对应计算数据结构来估计的)中的每个变量的对应的时间序列数据或传感器测量结果相关联。
在实施例中,计算机处理器可以执行特征选择512,标识与目标变量具有强关系的上游传感器和下游传感器。可使用其他特征选择方法,其可使用统计数据评估每个输入变量与目标变量之间的关系,且选择与目标变量具有最强关系的那些输入变量。所选择的特征可以包括可以被确定为与确定或估计混合传感器的数据相关的数据。特征的示例可包括材料含量和操作条件,诸如温度、压力和其他操作条件。例如,使用图2和图3中所示的实例,特征可以包括原材料含量测量结果、流入和过程变量、后处理含量测量结果、以及流出变量。混合传感器数据还可以被选择为特征,例如,对尾矿采样数据。在实施例中,在512处的特征选择计算参数“tau_1”(也称为tau_1)、“tau_2”(也称为tau_2),这些参数是与图形数据结构相对应的滞后参数和超前参数。例如,这些参数基于保持或存储在图形数据结构中的时间序列测量结果数据来计算。
在一个实施例中,计算机处理器构建并使用存储器内因果处理图形数据结构(例如,用于计算机处理的内部计算机数据结构)并基于因果处理图形数据结构来标识供选择的上游传感器和下游传感器。
在一个实施例中,计算机处理器可通过使用上游数据514前向推断或估计、使用混合传感器数据516自推断或估计以及使用下游数据518前向推断或估计来估计混合传感器的隐藏值。计算机处理器在520处将所估计的隐藏值聚合到最终传感器值。在实施例中,在514、516、518和520处示出的组件可以包括神经网络或神经网络的聚合。最终值可以例如用于应用522。应用522可包括提供混合传感器、提供环境危险排放警告、生产力警告或另一应用。在一个方面,混合传感器可以连接到物理系统并且激活控制器以改变输入(例如,物理系统中使用的材料含量和/或操作条件)中的一个或多个。例如,可控制控制添加到物理系统中的材料含量的量的阀或导管以打开或关闭来控制量。作为另实例,可以控制设定点设定运行条件,如温度、压力、和/或另一种条件。在实施例中,如此确定的混合传感器值可以例如通过计算机处理器直接与物理系统的控制器通信来实时地或接近实时地自动控制物理系统。所确定的混合传感器值还可以例如实时地或接近实时地被存储在存储设备502中。存储的混合传感器值可以对应用522可用。
图6示出了实施例中的因果处理图(因果性图)。在目标变量604上具有影响的上游过程变量(上游传感器或特征)602被链接在数据结构中。目标变量604还被链接到受目标组件影响的下游过程变量606。在实施例中,影响下游过程变量606的上游过程变量602也可以被链接。
在实施例中,因果性是从工业过程顺序如物理和化学过程顺序实现的。tau_1、tau_2和tau_3是大于0的值,表示针对影响的时间滞后。这些滞后中的一个或多个可以用作用于分析的时间序列窗口,例如,用于确定或估计未观测的混合传感器。例如,从时间点t-tau_1到时间点t的时间段(时间点t是要估计未观察到的混合传感器的时间),在该时间段期间(也被称为上面的第一时间窗口),上游过程变量对目标变量的影响可以通过上游过程变量对目标变量之间的关系观察到。
在从时间点t至时间点t+tau_2的时间段(以上也称为第二时间窗口)中可以观察到下游变量606。在实施例中,tau-3大于tau-1,tau-3大于tau-2,tau-3可相当于tau-1+tau2。
图7是示出了与在实施例中用于估计目标传感器值的数据源相关联的时间范围的另一示图。数据源包括在时间段t-tau_1至t内获得或监视的上游数据(x_u)702、在时间段t至t+tau_2内获得或监视的下游数据(x_d)704、以及过去的监视目标值(y(t))706。在时间t估计目标变量708,例如,混合传感器值。该系统(例如,该系统的计算机处理器)可以生成近实时混合传感器。在方面,在时间点t确定的传感器值的最大延迟是tau_2。tau_2的值较小,例如,2分钟。在这样的示例中,下游数据采样之间的时间间隔可小于tau_2。
图8是示出了实施例中用于前向和后向推断关系的另一动态图的示图。上游数据的时间序列802具有与目标变量的时间序列804和下游数据的时间序列806(例如,在808和810所示)的前向推断关系,从前一时间步骤到下一时间步骤。在目标变量的时间序列804中,目标变量在下时间步骤中与下目标变量具有关系,例如,如在812所示。下游数据的时间序列806与目标变量的时间序列具有后向推断关系,例如,下一时间步骤中的下游数据与前一时间步骤中的目标变量具有关系,例如,如在814所示。
图9是示出在实施例中确定一个或多个隐藏传感器值时的上游变量、目标变量和下游变量的处理流程的示图。在实施例中,过程流使用动态图。上游变量或数据或传感器数据902包括一个或多个上游变量或特征,例如,U1…Uk,k指不同的上游变量的数量。虽然未示出,但可以使用用于不同上游变量中的每个上游变量的时间序列(例如,从t到t-tau_1)。在一个实施例中,目标变量904是一个变量,例如y,并且其值在时间ty(t)被估计。下游变量或数据或传感器数据906可以包括一个或多个下游变量或特征,例如,D1…D1、l(字母l)指代不同下游变量的数量。虽然未示出,但可以使用用于不同上游变量中的每的下游变量的时间序列(例如,从t到t+tau_2)。
图10是图示一个实施例中的神经网络架构的示图,其可被训练成在给定时间点估计目标变量。例如,经训练的神经网络可以用作混合传感器。
神经网络(f
神经网络的输入可以是XU1(t-tau
在此,“t”用来表示当在实践中使用在此披露的一个实施例中的系统和/或方法时的当前时间。相对于实时“t”,该系统可以在时间(t-tau
tau
相对于任何时间的“提前”,例如,“tau”或\tau,是指相对于时间\tau向右(稍后,或将来)的时间。
相对于任何时间(例如,\tau)的“滞后”是指相对于时间\tau在左边(在之前或在过去)的时间。
\tau_{U_k}:所有这些是“滞后”,因为有影响/因果的上游变量是来自过去的滞后值。“U”是指上游。U1至Uk是指k个不同的上游数据。例如,可以使用k个上游数据,每个具有值的时间序列。
\tau_{D_k}:所有这些是“提前”,因为影响/因果相关的下游变量是来自相对未来的稍后/提前值。“D”是指下游。
此处,“t”用于表示当前时间,例如,当在实践中使用本文中所公开的系统和/或方法时。相对于实时“t”,该系统可以在时间(t-tau
神经网络(f
神经网络(f
神经网络(g)1008聚合神经网络1002、1004和1006以输出经聚合的目标变量估计。例如,神经网络(g)可基于神经网络在1002、1004和1006处的真实数据来训练并输出经聚合的目标值。例如,神经网络(g)1008可以估计y(t-tau
y(t-tau
f
Tau
在此,“t”是指例如当它涉及实时使用的系统时的实时当前时间“t”。相对于实时“t”,该系统可以在时间(t-tau
图11是示出实施例中的方法的流程图。处理器或硬件处理器可以执行实施例中的方法。在1102,该方法可包括估计与在目标变量采集时间测量的目标变量的前向依赖性相关的上游滞后窗口长度(例如,tau_1)。在实施例中,使用已知的标准时间序列统计技术来估计滞后和提前。例如,针对滞后的不同值(例如,1、2、3、4、...),计算目标与每个上游变量之间的互相关性,并且将对应于上游变量与目标之间的最高互相关性的滞后选择为“滞后”参数。在又一种方法中,系统可以留下此“滞后”参数作为滞后范围(例如,[1,2,3,...,L])上的模型超参数,并且使用验证集和超参数调谐为每个上游变量选择最佳滞后值。相对于任何时间,例如\tau的滞后”是指相对于时间\tau向左(之前,或过去)的时间。\tau_{U_k}:所有这些值是“滞后”,因为有影响/因果的上游变量是来自过去的滞后值。
在1104,该方法可包括估计与在目标变量采集时间测量的目标变量的后向依赖性相关的下游滞后窗口长度(例如,tau_2)。在实施例中,使用已知的标准时间序列统计技术来估计滞后和提前。例如,针对滞后的不同值(例如,1、2、3、4、...),计算目标与每个下游变量之间的互相关性,并且将对应于下游变量与目标之间的最高互相关性的提前选择为“提前”参数。在又一种方法中,该系统可以留下此“超前”参数作为滞后范围(例如,[1,2,3,…,L])上的模型超参数,并且使用验证集和超参数调谐为每个下游变量选择最佳超前值。相对于任何时间(例如,\tau)的“提前”是指相对于时间\tau向右(稍后,或将来)的时间。\tau_{D_k}:所有这些值是“提前”,因为有影响/因果的下游变量是来自相对未来的稍后/提前值。
在1106处,该方法可以包括集成来自紧接在前的时间窗口(来自目标变量采集时间)的上游变量的测量值,该时间窗口的持续时间(长度)是来自1102的tau_1。上游变量包括比生成混合传感器来估计的目标变量的测量结果频率更精细或更高频率的测量结果。该时间窗口也被称为第一时间窗口。在实施例中,还可在第一时间窗口上进行各种时间序列特征推导。已知的技术可以用于从具有一个或多个连续测量结果的时间序列窗口得到时间序列特征。
在1108,该方法可以包括集成来自紧接在后的或者紧接其后的时间窗口(从目标变量采集时间)的下游变量的测量结果,该时间窗口的持续时间(长度)是来自1104的tau_2。下游变量包括比生成混合传感器来估计的目标变量的测量结果频率更精细或更高频率的测量结果。该时间窗口也被称为第二时间窗口。在实施例中,可在第二时间窗口内执行各种时间序列特征推导。已知的技术可以用于从具有一个或多个连续测量结果的时间序列窗口得到时间序列特征。
在1110处,所述方法可以包括使用在测量(例如,实验室测量)的历史数据中可用的监督和/或真实数据,来学习(训练)从跨越来自1106和1108的特征的测量结果的组合的“输入”到“输出”(目标变量)的映射,所述“输出”(目标变量)是用于较不频繁测量的变量(例如,实验室测量的变量,其可能具有延迟)的混合传感器。在实例中,其中例如由于实验室处理时间而存在从采集和获得测量结果数据的时间延迟,这些“输出”变量可以在时间上与对应的历史采集时期对齐。在一个实施例中,学习包括训练一个或多个神经网络,例如,如图10所示。
对于本实施例中的历史学习,1106和1008处的处理考虑分别由1102和1104处的处理所产生的相对于所有历史采集时期的大小的上游和下游窗口,对于所有历史采集时期,存在对应的目标变量,例如,感兴趣的变量(例如,正为其生成混合传感器的目标变量)的对齐的报告实验室数据。
在1112,所学习的映射或神经网络在运行时间可以例如在任何时间点(例如,“t_any”)运行,这是通过相对于(t_any-tau_2)处的时间点构建长度tau_1和tau_2的上游窗口和下游窗口以便在时间点(t_any-tau_2)处获得混合传感器的估计值。虽然这个实例示出了存在一个上游变量和一个下游变量的简单情况场景,但是该方法可以用多个上游变量和/或多个下游变量来操作。在实施例中,对于每个特定的滞后(上游)或者提前(下游)变量,各种“滞后”和“提前”可以是不同的。用于训练神经网络和通过神经网络的推导的值可以是分别对应于不同的上游和下游变量的这些“滞后”和“超前”的相同值。
该方法可以提供缓慢测量的感兴趣变量(目标变量)的更精细的估计频率。例如,在连续时间的任何点(例如,t_any),该方法估计前一时刻的目标变量,即(t-tau_2)。
返回参考图4,例如,在其中目标变量(感兴趣的,为其生成混合传感器)在实际采样的时间和确定测量值的时间之间具有延迟的示例场景中,以下术语可以适用:“所采集的时间段”是指样本被抽取408的时间(例如,并发送用于分析,诸如发送至实验室以确定测量值);“报告的时间段”是指在实验室相关的延迟(或另一分析延迟)之后,实验室报告(或另一分析报告)410可用于相应的所采集的样品的时间。
为了创建包括输入-输出数据的训练数据,该方法可以将到达“报告时间”的实验室报告值(或在所采集的时间段与所报告的时间段之间具有延迟的目标变量的测量值)与对应的“所采集的时间”进行对齐或移位。在实施例中,该方法还基于从所采集的时间段到不同时间段的时间来将目标度量的时间范围(例如,使用侵入式采样来测量的)分区。训练输入-输出数据例如包括在第一时间窗口中测量的上游数据的时间序列和在第二时间窗口(作为输入)中测量的下游数据的时间序列,以及具有在第一时间窗口之后且在第二时间窗口之前的采集时间的测量目标变量,其中,第一时间窗口、采集时间和第二时间窗口在时间上是连续的。可以运行基于训练数据训练的聚合神经网络(例如,图10中所示)以提供可以在请求或给定时间测量目标变量的混合传感器。在实施例中,不同的变量可以具有不同的测量速率。
例如,对于给定的时间t,混合传感器在时间t的测量值是基于以下计算的:在时间窗口[t-tau_1,t]上测量的上游传感器值;时间窗口上测量的下游值[t,t+tau_2];测量的目标变量度量(例如,具有“报告时间”的目标度量的实验室结果)。与测量的目标变量度量相关联的在训练中使用的时间是移位至对应的采集时间(此处,采集时间小于t)的对齐或移位时间。在实施例中,不同的变量可以具有不同的测量速率。此处,“t”用于表示当前时间,例如,当在实践中使用或执行在本文中公开的系统时。相对于实时“t”,该系统可以在时间(t-tau
在实施例中,该方法可以使用因果图在近连续时间内使用双向方法(例如,使用来自上游变量的前向影响和来自下游变量的后向影响两者)来对目标变量(例如,实验室变量)的估计进行姿态。先前测量的目标变量还可用于估计下一目标变量。该估计可以基于这三组测量来进行,例如,使用组合的估计。也可以基于那三组测量来执行估计,例如,使用针对测量组估计的单独测量的组合。
在实施例中,该方法可以使传感器的低速率监视与另传感器的高速率监视匹配。例如,该方法可用使用因果关系图和真实值一起估计的值来填充低速率监视的间隙。
在实施例中,该方法可以生成混合传感器以解决与慢速监视速率传感器相关联的问题或难度。例如,该方法在高频和自动监视是困难的或不可能的情况下(例如在尾矿监视中)生成混合传感器,例如为那些较不频繁监视的传感器创建混合传感器。在一方面中,所述方法可使用慢速率测量值以及使用因果关系图来找到并非由传感器直接测量的值。
在实施例中,可以提供一种方法、系统和装置,其在诸如制造和化学生产过程的工业过程中为目标变量或度量生成混合传感器,该目标变量或度量包括具有大采样间隔(低频测量)的昂贵侵入性测量和由于分析(例如,实验室)工作引起的延迟。在一个实施例中,该方法例如创建定性因果性图或数据结构,其示出了什么是上游因果边和下游因果边的链接。该方法还以它们的可用采样和测量速率从工业过程中的被测变量接收传感器数据。该方法还以与上游和下游变量的集合相同或类似的高速率估计目标变量。该方法可以进一步创建使用最近的实验室测量和目标变量的估计值的混合传感器。该方法可以基于生成的混合传感器的结果向工业过程发送警报或信号消息,例如但不限于危险排放警报、生产力相关的过程警告和/或另一警告。该方法还可以调用或控制工业过程中的设定点变化或致动物理致动器来校正基于该混合传感器值确定的错误条件。
在实施例中,该方法可例如通过以下方式创建定性因果关系图或数据结构:基于候选上游变量集合与过程中的目标变量之间的因果关系,确定相对于目标变量具有较高取样和测量速率的候选上游变量集合;以及基于所述过程中的那些下游变量集合与所述目标变量之间的因果关系来确定相对于所述目标变量具有较高取样和测量速率的候选下游变量集合。
在实施例中,三个单独估计的组合估计可以为目标变量提供更高频率的估计。组合估计包括双向估计。例如,该方法使用前向估计来在专用于该估计的时间窗口内使用变量的候选上游集合来预测目标变量。该方法还使用后向估计以在专用于该估计的时间窗口内使用度量值的候选下游集合来执行目标变量的后向时间推断。该方法进一步使用目标变量的真实测量值的历史值。该方法可以通过聚合以上三个估计使用聚合估计来创建混合传感器,并且例如可以使用权重和对三个估计中的每的关注来确定或估计在给定时间的目标变量(混合传感器)值。
在实施例中,前向和后向估计可以使用物理或化学原理来开发经验估计模型和/或使用基于数据科学方法的深度学习模型来完成。
在实施例中,可通过使用物理停留时间和物理处理时间来计算多个变量之间的因果关系的时间窗口和滞后,和/或使用时间序列相关性以使用数据驱动的方法来分析时间窗口,来为前向估计和后向估计创建时间窗口。
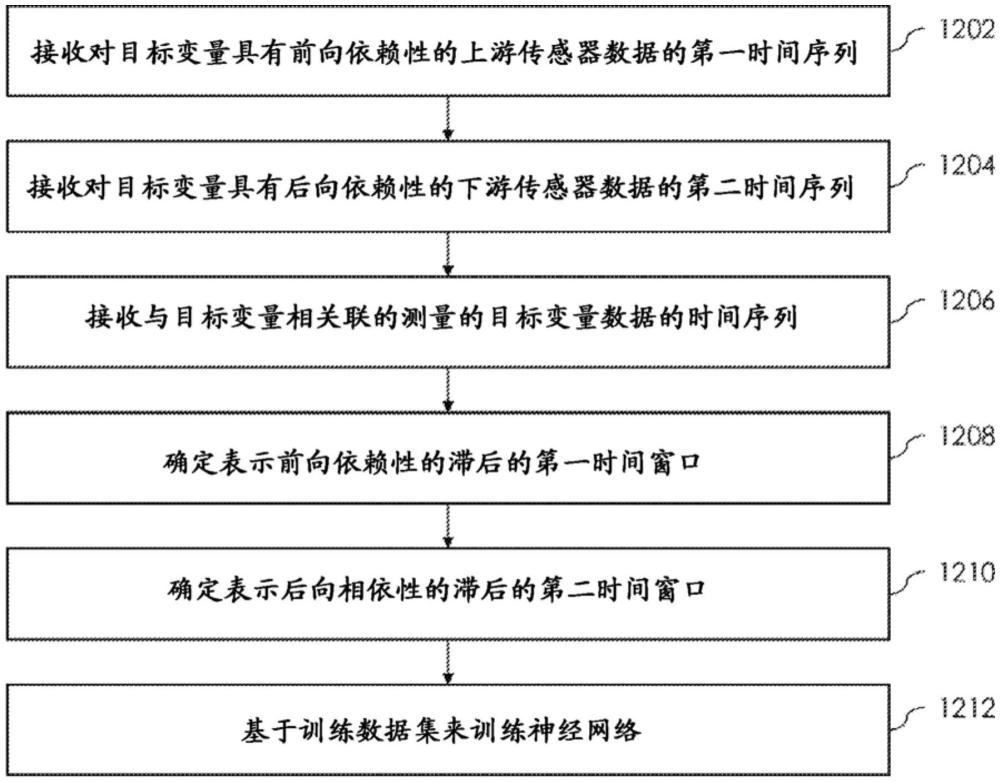
图12是示出了实施例中的方法的另一流程图。在1202,该方法包括接收对目标变量具有前向依赖性的上游传感器数据的第一时间序列。上游传感器数据的第一时间序列可以是一维或多维时间序列数据。在1204,该方法包括接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列。下游传感器数据的第二时间序列可以是一维或多维时间序列数据。在1206处,所述方法包含接收与目标变量相关联的测量的目标变量数据的时间序列。该目标变量具有测量频率,该测量频率低于与上游传感器数据和下游传感器数据相关联的测量频率。在1208,该方法包括确定表示上游传感器数据与目标变量之间的前向依赖性的滞后的第一时间窗口。在1210处,所述方法包含确定表示下游传感器数据与目标变量之间的后向相依性的滞后的第二时间窗口。在1212,该方法包括基于训练数据集来训练机器学习模型(诸如神经网络),该训练数据集至少包括第一时间窗中的上游传感器数据的第一时间序列、第二时间窗中的下游传感器数据的第二时间序列、以及测量的目标变量数据的时间序列,以在给定时间估计目标变量的值。训练数据集可以包括多个这样的时间序列数据集。
该方法还可包括创建因果关系数据结构,该因果关系数据结构在时间上将上游传感器数据的第一时间序列与测量的目标变量数据的时间序列进行前向链接,并且在时间上将下游传感器数据的第二时间序列与测量的目标变量数据的时间序列进行后向链接。可基于因果关系数据结构来选择上游传感器数据和下游传感器数据。
在实施例中,经训练的机器学习模型(诸如神经网络)在给定时间估计目标变量的值。在实施例中,基于针对给定时间估计的目标变量的值,硬件处理器还控制工业过程中的设定点。例如,该工业过程包括油砂处理,并且该目标变量包括与尾矿相关联的特性。
在实施例中,诸如神经网络的机器学习模型包括第一神经网络、第二神经网络和第三神经网络的聚合,第一神经网络被训练成基于上游传感器数据的前向依赖性的第一时间序列来预测目标变量的值,第二神经网络被训练成基于下游传感器数据的后向依赖性的第二时间序列来预测目标变量的值,第三神经网络被训练成基于测量的目标变量数据的时间序列来预测目标变量的值。
在实施例中,测量的目标变量的报告时间具有距目标变量的采集时间的延迟。包括测量的目标变量数据的时间序列的训练数据集可以包括在被转移到测量的目标变量的对应采集时间的报告时间确定的测量的目标变量的数据。在实施例中,诸如神经网络的机器学习模型在运行时估计目标变量在给定时间的值而没有延迟。
图13是示出一个实施例中的系统的部件的示图,在一个实施例中,该系统可生成混合传感器。诸如中央处理单元(CPU)、图形处理单元(GPU)和/或现场可编程门阵列(FPGA)、专用集成电路(ASIC)和/或另一处理器之类的一个或多个硬件处理器1302可以与存储器设备1304耦合,并且生成混合传感器。存储器设备1304可以包括随机存取存储器(RAM)、只读存储器(ROM)或另一存储器设备,并且可以存储用于实现与在此描述的方法和/或系统相关联的不同功能的数据和/或处理器指令。一个或多个处理器1302可以执行存储在存储器1304中或者从另一计算机设备或介质接收的计算机指令。存储器设备1304可以例如存储用于一个或多个硬件处理器1302的功能的指令和/或数据,并且可以包括操作系统和指令和/或数据的其他程序。一个或多个硬件处理器1302可以接收输入,例如,接收对目标变量具有前向依赖性的上游传感器数据的第一时间序列,接收对目标变量具有后向依赖性的下游传感器数据的第二时间序列,以及接收与目标变量相关联的测量的目标变量数据的时间序列。上游传感器数据的第一时间序列可以是一维或多维时间序列数据。下游传感器数据的第二时间序列可以是一维或多维时间序列数据。在一方面,一个或多个硬件处理器1302还可确定表示前向依赖性的滞后的第一时间窗口和确定表示下游传感器数据与目标变量之间的后向依赖性的滞后的第二时间窗口。一个或多个硬件处理器1302可以基于如上所述的训练数据集来训练诸如神经网络的机器学习模型。硬件处理器1302可以运行经训练的机器学习模型(诸如神经网络)以在给定时间估计目标变量的值。基于针对给定时间估计的目标变量的值,硬件处理器1302可以进一步控制工业过程中的设定点。在实施例中,训练数据可以存储在存储装置1306中或经由网络接口1308从远程装置接收,并且可以被临时加载到存储器装置1304中以用于训练机器学习模型,例如神经网络。一个或多个硬件处理器1302可以与接口设备耦合,该接口设备诸如用于例如经由网络与远程系统通信的网络接口1308和用于与诸如键盘、鼠标、显示器和/或其他之类的输入和/或输出设备通信的输入/输出接口1310。
图14示出了在一个实施例中可实现混合传感器生成系统的示例计算机或处理系统的示意图。计算机系统仅是合适的处理系统的一个示例,并且不旨在对本文描述的方法的实施例的使用范围或功能提出任何限制。所示的处理系统可以与许多其他通用或专用计算系统环境或配置一起操作。适于与图14所示的处理系统一起使用的众所周知的计算系统、环境和/或配置的示例可以包括但不限于个人计算机系统、服务器计算机系统、瘦客户端、厚客户端、手持式或膝上型设备、多处理器系统、基于微处理器的系统、机顶盒、可编程消费电子产品、网络PC、小型计算机系统、大型计算机系统和包括任何上述系统或设备的分布式云计算环境等。
可以在由计算机系统执行的计算机系统可执行指令(诸如程序模块)的一般上下文中描述计算机系统。一般而言,程序模块可包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、组件、逻辑、数据结构等。计算机系统可在分布式云计算环境中实践,其中任务由通过通信网络链接的远程处理设备执行。在分布式云计算环境中,程序模块可以位于包括存储器存储设备的本地和远程计算机系统存储媒质中。
计算机系统的组件可以包括但不限于一个或多个处理器或处理单元12、系统存储器16和将包括系统存储器16的不同系统组件耦合到处理器12的总线14。处理器12可包括执行本文描述的方法的模块30。模块30可被编程到处理器12的集成电路中,或从存储器16、存储装置18或网络24或其组合加载。
总线14可以表示若干类型的总线结构中的任何一种中的一个或多个,包括存储器总线或存储器控制器、外围总线、加速图形端口、以及使用各种总线架构中的任一种的处理器或局部总线。作为示例而非限制,此类体系结构包括工业标准体系结构(ISA)总线、微通道体系结构(MCA)总线、增强型ISA(EISA)总线、视频电子标准协会(VESA)局部总线以及外围组件互连(PCI)总线。
计算机系统可以包括各种计算机系统可读媒质。这样的介质可以是可由计算机系统访问的任何可用介质,并且其可以包括易失性和非易失性介质、可移动和不可移动介质。
系统存储器16可包括易失性存储器形式的计算机系统可读媒体,例如随机存取存储器(RAM)和/或高速缓冲存储器或其他。计算机系统可以进一步包括其他可移动/不可移动、易失性/非易失性计算机系统存储媒质。仅通过示例的方式,存储系统18可以被提供用于从不可移动、非易失性磁介质(例如,“硬盘驱动器”)中读取和向其写入。尽管未示出,可以提供用于从可移动非易失性磁盘(例如,“软盘”)读取或向其写入的磁盘驱动器,以及用于从可移动非易失性光盘(如CD-ROM、DVD-ROM或其他光学介质)读取或向其写入的光盘驱动器。在这样的情况下,每个个可以通过一个或多个数据介质接口连接到总线14。
计算机系统还可与一个或一个以上外部装置26(例如,键盘、指向装置、显示器28等)通信;和/或使计算机系统能够与一个或多个其他计算设备通信的任何设备(例如,网卡、调制解调器等)。这种通信可经由输入/输出(I/O)接口20发生。
此外,计算机系统可经由网络适配器22与一个或多个网络24(诸如局域网(LAN)、通用广域网(WAN)和/或公共网络(例如,互联网))通信。如图所示,网络适配器22通过总线14与计算机系统的其他部件通信。应当理解,虽然未示出,但是其他硬件和/或软件组件可以与计算机系统结合使用。示例包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、RAID系统、磁带驱动器和数据归档存储系统等。
本发明可以是任何可能的技术细节集成度的系统、方法和/或计算机程序产品。计算机程序产品可包括其上具有用于使处理器执行本发明的各方面的计算机可读程序指令的计算机可读存储媒质(或多个媒质)。
计算机可读存储媒体可为可保留和存储供指令执行装置使用的指令的有形装置。计算机可读存储媒质可以是,例如但不限于,电子存储设备、磁存储设备、光存储设备、电磁存储设备、半导体存储设备、或者上述的任意合适的组合。计算机可读存储媒质的更具体示例的非穷尽列表包括以下各项:便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、静态随机存取存储器(SRAM)、便携式紧凑盘只读存储器(CD-ROM)、数字通用盘(DVD)、记忆棒、软盘、诸如穿孔卡之类的机械编码设备或具有记录在其上的指令的槽中的凸出结构、以及上述各项的任何合适的组合。如本文所使用的计算机可读存储媒体不应被解释为暂时性信号本身,例如无线电波或其他自由传播的电磁波、通过波导或其他传输媒体传播的电磁波(例如,穿过光纤电缆的光脉冲)或通过电线发射的电信号。
本文中所描述的计算机可读程序指令可以经由网络(例如,互联网、局域网、广域网和/或无线网络)从计算机可读存储介质下载到相应的计算/处理设备,或者下载到外部计算机或外部存储设备。网络可以包括铜传输电缆、光传输纤维、无线传输、路由器、防火墙、交换机、网关计算机和/或边缘服务器。每个计算/处理设备中的网络适配器卡或网络接口接收来自网络的计算机可读程序指令,并转发计算机可读程序指令以存储在相应计算/处理设备内的计算机可读存储媒质中。
用于执行本发明的操作的计算机可读程序指令可以是汇编指令、指令集架构(ISA)指令、机器指令、机器相关指令、微代码、固件指令、状态设置数据、集成电路的配置数据、或以一种或多种程序设计语言的任何组合编写的源代码或目标代码,这些程序设计语言包括面向对象的程序设计语言(诸如Smalltalk、C++等)和过程程序设计语言(诸如“C”程序设计语言或类似程序设计语言)。计算机可读程序指令可以完全地在用户计算机上执行、部分在用户计算机上执行、作为独立软件包执行、部分在用户计算机上部分在远程计算机上执行或者完全在远程计算机或服务器上执行。在后一种情况下,远程计算机可通过任何类型的网络(包括局域网(LAN)或广域网(WAN))连接至用户计算机,或者可连接至外部计算机(例如,使用互联网服务提供商通过互联网)。在一些实施例中,包括例如可编程逻辑电路、现场可编程门阵列(FPGA)或可编程逻辑阵列(PLA)的电子电路可以通过利用计算机可读程序指令的状态信息来使电子电路个性化来执行计算机可读程序指令,以便执行本发明的各方面。
下面将参照根据本发明实施例的方法、装置(系统)和计算机程序产品的流程图和/或框图描述本发明。应当理解,流程图和/或框图的每个方框以及流程图和/或框图中各方框的组合,都可以由计算机可读程序指令实现。
这些计算机可读程序指令可被提供给计算机或其他可编程数据处理装置的处理器以产生机器,使得经由计算机或其他可编程数据处理装置的处理器执行的指令创建用于实现在流程图和/或框图的或多个框中指定的功能/动作的装置。也可以把这些计算机可读程序指令存储在计算机可读存储媒质中,这些指令使得计算机、可编程数据处理装置、和/或其他设备以特定方式工作,从而,其中存储有指令的计算机可读存储媒质包括包含实现流程图和/或框图中的或多个方框中规定的功能/动作的方面的指令的制造品。
也可以把计算机可读程序指令加载到计算机、其他可编程数据处理装置、或其他设备上,使得在计算机、其他可编程装置或其他设备上执行一系列操作步骤,以产生计算机实现的处理,使得在计算机、其他可编程装置或其他设备上执行的指令实现流程图和/或框图中的或多个方框中规定的功能/动作。
附图中的流程图和框图示出了根据本发明的不同实施例的系统、方法和计算机程序产品的可能实现方式的架构、功能和操作。对此,流程图或框图中的每个框可表示指令的模块、段或部分,其包括用于实现指定的逻辑功能的一个或多个可执行指令。在一些备选实现中,框中标注的功能可以不按照图中标注的顺序发生。例如,连续示出的两个方框实际上可以作为一个步骤完成,同时、基本上同时、以部分或完全时间上重叠的方式执行,或者方框有时可以以相反的顺序执行,这取决于所涉及的功能。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或动作或执行专用硬件与计算机指令的组合的专用的基于硬件的系统来实现。
本文中使用的术语仅用于描述具体实施例的目的,而并非旨在限制本发明。如本文中使用的,除非上下文另有明确指示,否则单数形式“一”、“一个”和“该”旨在也包括复数形式。如本文中使用的,术语“或”是包括性的算子并且可以意指“和/或”,除非上下文另有明确或明确指示。还应当理解,当在本文中使用时,术语“包括(comprise)”、“包括(comprises)”、“包括(comprising)”、“包括(includes)”、“包括(includes)”、“包括(including)”和/或“具有(having)”可以指定所述特征、整体、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、整体、步骤、操作、元件、部件和/或其组合的存在或添加。如本文中使用的,短语“在实施例中”不一定指相同的实施例,尽管它可以指相同的实施例。如本文中使用的,短语“在一个实施例中”不一定指相同的实施例,尽管它可以指相同的实施例。如本文中使用的,短语“在另一实施例中”不一定指不同的实施例,尽管它可以指不同的实施例。此外,实施例和/或实施例的部件可以彼此自由组合,除非它们相互排斥。
以下权利要求中的所有装置或步骤加功能元件(如果有的话)的相应结构、材料、动作和等同物旨在包括用于与如具体要求保护的其他要求保护的元件组合执行所述功能的任何结构、材料或动作。已经出于说明和描述的目的呈现了本发明的描述,但并不旨在是详尽的或限于所公开形式的本发明。在不背离本发明的范围的情况下,许多修改和变化对于本领域普通技术人员来说是显而易见的。选择和描述实施例以便最好地解释本发明的原理和实际应用,并且使本领域的其他普通技术人员能够理解本发明的具有适合于预期的特定用途的各种修改的各种实施例。
- 用于磁致伸缩式扭矩传感器的改进的间隙补偿
- 用于侵入式生物传感器的传感器保持器装置
- 用于侵入式生物传感器的传感器保持器装置