定制出行交通系统的运行车辆位置定位技术方案
文献发布时间:2024-04-18 19:48:15
技术领域
一种定制出行交通系统的运行车辆位置定位技术方案,尤其是解决包括几千万人口超大城市市民上下班难题的运行车辆位置定位技术方案。
背景技术
发明人在发明《一种城市交通系统和方法》(发明号ZL201610071046.1)中提出了一种城市交通系统和方法。其后又通过《解决大城市通勤难题的城市交通系统和方法》(申请号202111207325.3)和《定制出行城市交通系统的辆连接技术方案》(申请号202111207365.8)等专利申请中提出以定制出行交通为特征的一种采用上下单轨轨路,以“预约直达”的定制专列作为乘客乘坐方式、以车辆集中统一控制为控制方式的轨道交通方案。
定制出行交通系统中的车辆分散行驶在各地轨路上,且全部都是在控制中心集中统一控制下自动运行。每辆运行的车辆时刻都需要知道自身的位置,同样控制中心也时刻需要知道所有运行车辆所处的位置。
公知车辆定位技术有卫星定位技术,广泛用于车辆导航。但卫星定位技术并不能成为定制出行交通系统中控制车辆运行的主要定位技术,原因是卫星定位有1至3秒的时间周期,对于时速超过100km的高速车辆而言,仅定位周期1秒构成的定位误差就超过27m,从控制需要而言,定位数据误差太大。
运行车辆精准可靠的定位技术对定制出行交通系统安全运行有决定性影响,而本发明人原有技术方案中没完整提出运动车辆精准可靠定位的技术方案。
发明内容
本发明的任务是要在定制出行交通系统中,发明一种所有在运行车辆都能可靠实时获取自身车辆精准位置参数、控制中心也同样可以获取所有运行中车辆精准位置参数的技术方案。
本发明人的定制出行交通系统是一种本质区别于现有公共交通系统的交通体系。其最本质的区别在于:第一,定制出行城市交通系统是不依赖现有道路的由无路基上下单轨道构建的独立轨道交通系统;第二,定制出行交通系统中,所有运行车辆和设施均无人驾驶和操作,且由【城市交通管理控制中心】实施集中统一控制;第三,现有公共交通系统的公交线路、车站、行车时间是公交公司确定的,乘客唯一的权力是去适应它。而定制出行交通系统则相反,交通系统是按照乘客的“出发地、目的地、出发时间”需要,由【城市交通管理控制中心】以最佳出行方案集中“定制”。第四,定制出行城市交通系统中的乘客乘车都是预约直达乘车。
本发明是这样实现的。
1. 定制出行交通系统至少配套设计建设有以下子系统。
①有以大型计算机(服务器)群为核心的【城市交通管理控制中心】。【城市交通管理控制中心】既是交通信息的管理中心,也是城市交通方案的规划中心和实时调整中心,还是整个城市交通系统车辆和设施的集中统一控制中心。②有由主通信信道、备用通信信道和应急信道为基本信道的通信子系统,有由同一个时间源同步的时间系统,有车辆定位、车辆位置激光红外相对定位、卫星绝对位置定位构建的【信息神经系统】。③有以轨路、车站轨道、备用轨道为核心的【轨道系统】。④有以车站和基础车辆、列车为核心的【车站和车辆设备系统】。⑤有以乘客互动终端、信道、受理单元、结算单元为核心的【乘用管理系统】。⑥有以维护、维修、升级改造部门为核心的【运行保障系统】。⑦有以车辆库、编组站为核心的【辅助车站设备系统】。
2. 定制出行交通系统至少采用以下技术方案。
2.1道路采用无路基上下单轨技术方案,由轨路支架支撑轨路。
2.2在定制出行交通系统中,所有乘客乘坐定制交通系统的列车,都必须向【城市交通管理控制中心】进行预约申请,确认后按确认的时间和车站计划乘车。
2.3所有乘客乘坐的列车全部都是由出发地直达目的地的“定制专列”。
2.4【城市交通管理控制中心】对整个定制出行城市交通系统的车辆、配套设施实行集中统一控制。
3.发明和实施定制出行交通系统中运行车辆的精准定位技术方案。
精准定位技术方案发明的任务是:所有在运行车辆都能可靠实时获取自身车辆精准位置参数、【城市交通管理控制中心】也同样可以实时获取所有运行中车辆精准位置参数。
定制出行交通系统中,【城市交通管理控制中心】将采用“规模车辆预置指令远程群控制”技术方案对车辆和配套运行设施实施集中统一控制。这个技术方案有以下技术关键点:第一,【城市交通管理控制中心】在乘客申请乘车后,由大型计算机不断更新包含全系统由每辆“专列”最佳“自出发地至目的地车辆运行方案”构成的相互协调配合的总运行方案。第二,每辆“专列”的“自出发地至目的地车辆运行方案”都有对应的、在规定时间节点开始由“专列”自我实施的“车辆控制指令队列”指令文件。第三,每辆“专列”的“车辆控制指令队列”都在实施前一个时间段由【城市交通管理控制中心】固化且按编号时间段,分时段分批次下传到对应“专列”,核实该编号时间段全部完整接收后,统一投入运行。第四,“专列”自“开始运行”时间节点起,在本地依据交通系统提供的时钟和实时位置参数,逐一执行“车辆控制指令队列”的指令,精准控制“专列”完成【城市交通管理控制中心】集中统一编制的每辆“专列”的“自出发地至目的地车辆运行方案”,最终实现【城市交通管理控制中心】对所有车辆的集中统一控制。这其中,有一个关键技术要求就是交通系统需要为所有运行车辆提供实时位置参数。
3.1建立定制出行交通系统中统一的“交通时间系”和“交通位置系”。
定制出行交通系统所有车辆及配套设施采用同一时间系统,以下将这个时间系统简称“交通时间系”,由同一时间基准同步。定制出行交通系统中所有车辆及配套设施采用统一的地理位置坐标系,以下将这一地理位置坐标系简称为“交通位置系”。定制出行交通系统是一个自动交通系统,对时间基准和位置坐标有严格的要求。定制出行交通系统是一个不断扩大的交通系统。一个实施例,先在北京城区,逐步扩大到郊区,有可能和河北省交通系统相连接,如果“交通时间系”和“交通位置系”不统一,交通就无法互联互通。定制出行交通系统“交通时间系”和“交通位置系”的一个实施例是由北斗导航信号的时间基准作为同步源,以北斗卫星定位作为位置基准,构建全国乃至全世界范围内的“交通时间系”和“交通位置系”,以避免系统扩展后带来的同步难题。从控制的角度,时间精度和运行中车辆的位置精度越高越好,但从交通系统上看,对于一个几十公里以至于上百公里范围内运行的车辆而言,车辆间的距离在非耦合情况下,车辆间距常态控制在100m以上是可以接受的。如果按300km/h的极速计算,100m间隔需要1.2s时间。在定制出行交通系统这样的专业控制系统中,时间同步精度至少也可以达ns级,而地理位置精度采用本发明人的发明至少可以达到cm级,100m间距和1.2s的间隔时间完全可以满足高速下的控制要求。
3.2建立起遍布交通系统的“交通位置系”轨路支架位置定位基准点。
定制出行交通系统轨路采用无路基架空上下单轨结构,轨路支架是必须的基础配置。轨路架空建设导致轨路支架间的距离很难超过20m。一个实施例,轨路支架距离为10m。因此,轨路支架是遍布交通系统的标配设施,而且每个轨路支架在定制出行交通系统的“交通位置系”中有明确固定的地理位置参数。定制出行交通系统中还有像车站、车辆电梯等配套设施也有明确固定的地理位置参数。本发明为每个轨路支架及车站、电梯等配套设施设置定制出行交通系统内唯一的“地址编码”,而且精准测定设施在“交通位置系”的地理位置参数。通过建设、测量和建数据库,在定制出行交通系统中,建立和及时刷新一套唯一地址编码”轨路支架、车站、轨梯作为“位置定位基准点”的“基准点地理位置参数数据库”。运动的车辆经过任意一个“位置定位基准点”,只要读取这个“位置定位基准点”的“地址编码”就可以通过位置参数库精准查出该地理位置的位置参数。在本发明中,用Bi(x,y,z)表示“交通位置系”中一个任意“位置定位基准点”的地理位置参数。每辆车辆在投运前都会在车辆中安装完整的“基准点地理位置参数数据库”,并在变更后及时升级更新。
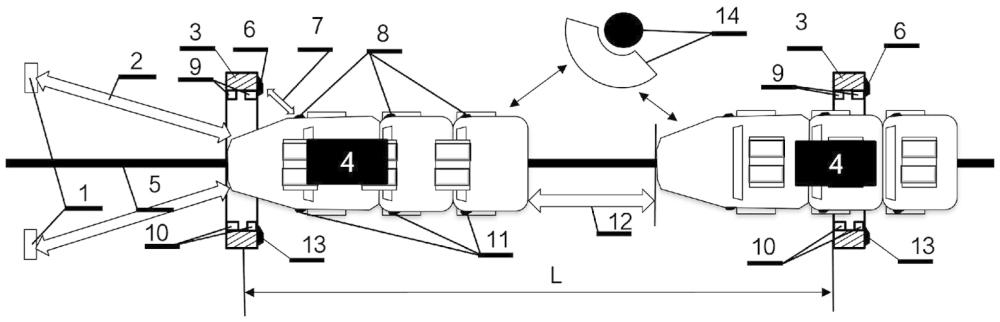
3.3构建可靠的运行车辆定位系统。图1是获取运行车辆精准位置参数的实施例示意图。图1中,(3)是轨路支架的剖面图。(4)是运行中的“专列”示意图。(5)是轨路,上轨已被省略。(6)是安装在运行车辆迎面侧轨路支架右侧上的有源光电通信装置。(8)是安装在每辆“专列”上的右侧光电通信装置,其中包含与装置(6)进行双向通信的装置,也包括和右侧有源光电装置(9)进行信息传输的有源光电单元。(7)代表有源光电通信装置(6)与有源光电通信装置(8)之间的通信过程的空间信道。(9)是安装在轨路支架上的右侧有源光电装置,由光信号接收单元和光信号发射单元构成,而且安装位置和车辆上进行非接触光电耦合的单元有相同高度,且:支架上的接收单元总与车辆上的发射单元对准,支架上的发射单元总与车辆上接收单元对准。与“专列”(4)行驶方向右侧的装置对应,轨路支架左侧和车辆的左侧也有和右侧同样功能的装置。图1中标注了与有源光电装置(9)对应的有源光电装置(10),与有源光电通信装置(8)对应的有源光电通信装置(11), 与有源光电通信装置(6)对应的有源光电通信装置(13)。在本发明中,采用左右同时配置是为了保险:即只要任意一侧位置信息采集有效就能保障整体位置信息有效。图1中,(1)是用于测量相对距离的有源光电装置及通信装置,既可以探测与列车(4)之间的相对距离及时上报【城市交通管理控制中心】,也可以为“专列”(4)上安装的测距仪(一个实施例,激光测距仪)提供专业反射体;光电装置及通信装置(1)被安装在靠近轨路换向器处、车辆电梯口、车站口等需要安全提示和安全操作的位置。(2)是列车运行时测量车辆(4)与装置(1)之间相对距离的光信道示意图。(12)是“专列”上安装的测量本车辆与前方车辆相对距离的测距信道示意图。(14)是北斗或其他卫星定位系统示意图,由卫星定位系统为定制出行交通系统提供时间基准和绝对地理位置,用于系统位置验证。本发明中车辆有可能高速运行,现在的卫星定位精度不够高,但其中的时间基准对系统来说足够准确,定位数据作为位置验证也足够有效。(L)是轨路支架间的距离,一个实施例为L=10m。
3.4通过光电装置读取“位置定位基准点”的精准位置信息。
3.4.1定制出行交通系统构建时已经实现:每个轨路支架在定制出行交通系统“交通位置系”中都是“位置定位基准点”,有系统中唯一的“地址编码”和位置参数。
3.4.2运动中车辆精准读取“位置定位基准点”参数的技术方案。图2是解释运动车辆精准获得轨路支架“位置定位基准点”参数的过程示意图。图中三根带t的箭头轴代表时钟轴。第1根时间轴为(车上光电通信装置)通过光信号发生器发出(指令+列车编码)的询问指令包时序信息示意图。第2根时间轴为(支架光电通信装置)通过光信号接收器接收到(指令+列车编码)询问指令包后返回(应答:地址编码)的应答包。第3根时间轴为(车上支架上光电通信装置)通过光信号发生器发出光信号在另一侧光接收产生光电脉冲的示意图。整个信号和脉冲发生可以用3个过程说明。
过程1:“专列”(4)驶过一根轨路支架(3)后,车上安装在两侧的(车上光电通信装置)的装置(8)和装置(11)会主动向下一根轨路支架(3)上安装的(支架光电通信装置)发送一个读取地址编码的(指令+列车编码)询问指令包,其中“列车编码”是驶过“专列”在交通系统中的唯一编码。
过程2:轨路支架(3)上安装的(支架光电通信装置)在接收(指令+列车编码)询问指令包后,会立即回复一个(应答:地址编码)的应答包,其中的“地址编码”是代表该轨路支架的唯一“地址编码”。
通过过程1和过程2的运行过程,轨路支架(3)上安装的(支架光电通信装置)已经可靠掌握本次途径“位置定位基准点”“专列”的列车编码,而“专列”也已掌握正在途经的轨路支架“地址编码”。
过程3:精准采集车辆途经轨路支架基准点的“交通时间系”时钟。通过轨路支架上的光信号发射单元和车辆上的光信号接收单元相互耦合精准获取车辆途径“位置定位基准点”的精准时间。“专列”途经安装在轨路支架内侧的光信号接收单元和光信号发射单元(9)或单元(10)时,轨路支架内侧的光信号发射单元和车辆上的光信号接收单元是非接触式光电耦合的,会在车辆接收单元中(车上支架上光电装置)时间轴上产生的电接收脉冲信号(16)。当车辆高速通过时,接收脉冲变窄; 当车辆低速通过时,接收脉冲变窄宽; 这个脉冲信号在高速时也会整体后移,低速时则前移,但在每种速度下脉冲宽度和脉冲前后移动量都是确定的,可以通过已知的实际速度进行数据修正,以获得更加精确的测量值。这个脉冲信号(16)的中心时间点(s1)加上速度修正量能够精准提供车辆途经轨路支架“位置定位基准点”位置的精准时间。图2中,(15)是车辆途经前一根轨路支架时,车辆接收单元时间轴上产生的电接收脉冲信号,中心点s0加上速度修正量代表车辆途经前一根轨路支架“位置定位基准点”位置的精准时间。求解脉冲信号中心值有很多实施方法,一个实施例在一微处理器定时器中,在脉冲上升沿到来时记录时间值,再在下降沿时记录另一个时间值,通过计算加上速度修正量获取脉冲中心点的精准时间值。
同样,通过运行车辆上的光信号发射单元和轨路支架上的光信号接收单元相互非接触式耦合,轨路支架上的接收单元也会精准获取车辆途经“位置定位基准点”位置的精准时间。“专列”途经安装在轨路支架内侧的光信号接收单元和光信号发射单元(9)或单元(10)时,车辆上的光信号发射单元和轨路支架内侧的光信号接收单元是互相非接触式光电耦合的,会在轨路支架接收单元中(车上支架上光电装置)时间轴上产生的电接收脉冲信号(16)。这个脉冲信号(16)的中心时间点(s1)加上速度修正量能够精准代表“已知编号列车”途经轨路支架“位置定位基准点”位置的精准时间。图2中,(15)是车辆途经前一根轨路支架时,轨路支架接收单元时间轴上产生的电接收脉冲信号,中心点s0加上速度修正量代表“已知编号列车”途经前一根轨路支架“位置定位基准点”位置的基准时间。由于轨路支架已经在过程1(指令+列车编码)指令包中,掌握途径“专列”的列车编码,因此可以通过专用信道将该“专列”通过轨路支架“位置定位基准点”的精准时点上传【城市交通管理控制中心】,提供在运行“专列”和车辆的位置参数。
3.4.3精准确定运动中车辆在“交通位置系”的位置。本发明通过所述过程1,车辆已经知道即将经过的轨路支架的地址编码, 在定制出行交通系统位置参数库中就可以得到该地址编码的精准位置参数Bi(x,y,z);同时,依据【城市交通管理控制中心】和实施车辆共同掌握的“车辆控制指令队列”,运行车辆是知道自身运行的速度ⅴ,当然速度是个矢量。车辆匀速运行的距离S=ⅴt,那么,任意时间点车辆的位置可以认为是已知基准点位置坐标和向量速度分量各自在增量时间中移动距离之和。以下设定:
a.由于在制出行交通系统中,轨路支架之间的距离L很近(一个实施例为10m),车辆速度可以认为是匀速的,或者速度变化规律是已知的;
b. 计算前即刚经过的轨路支架的精准位置参数为Bi(x,y,z);
c.运行速度以矢量表示,可以分解为x、y、z分量,即速度为v(x,y,z);
d.若运行中车辆的实时位置为Wi(x,y,z),则时间增量为△t时的车辆位置为:
Wi(x,y,z)=Bi(x,y,z)+v(x,y,z)*△t……………………………………[1]
换一个表述,运行“专列”在运行中的实时位置Wi(x,y,z)是依据途经轨路支架“位置定位基准点”Bi(x,y,z)后的时间增量△t与“专列”已知速度v(x,y,z)的矢量积与基准点位置参数Bi(x,y,)之和,即:Wi(x,y,z)=Bi(x,y,z)+v(x,y,z)* △t。
计算位置也可以用另一个实施例方案,即把速度视为常量,距离为模量,需要时用模量转换出向量,因为这段轨路是固定的,有固定的向量计算参数。
3.4.4本发明车辆动态“交通位置系”位置定位精度的评估。定制出行交通系统是一个专业交通系统,光电单元可以使用仪器级元器件设计,加上轨路平直优质,速度可以通过计算机规划实现高度稳定,脉冲定位的时间精度有望达到10纳秒级,而动态位置精度可达cm级。对于控制余量100m级(有风险区域预留距离100m~200m)的定制出行交通系统而言,足足满足控制需要。
3.5用卫星定位系统数据进行位置参数标定和定位验证。
图1中(14)是北斗或其他卫星定位系统。卫星定位的优势在于:第一,覆盖范围包含全球,即可以提供全球的“交通位置系”。第二,北斗卫星定位系统是专业的位置定位系统,具有可靠性和稳定性。本发明充分利用卫星定位的优势进行下述应用。
3.5.1用卫星定位系统数据对“交通位置系”中各个“位置定位基准点”进行位置参数标定。
3.5.2定制出行交通系统车辆会在运行中接收卫星定位数据与每辆“专列”运行计划设定的位置进行比对(比对充分引入可能的误差),一旦发现超过标准即通过应急信道上报【城市交通管理控制中心】进行后续处理。
4. 定制出行交通系统运行车辆的精准定位技术方案有明显的优点。
第一,充分利用轨路支架高密度(间距10m)、固定均布于有轨路各个角落的已有条件,轻松构建地理位置基准点。方案建造成本低,实施方便。
第二,定制出行交通系统的车辆全部以最佳运行方案平稳匀速或者匀变速运行,保证运行车辆定位精度高、安全性好。
第三,本发明采用的光电方案本身都是成熟的相对低成本的技术方案,可以极大降低制造成本,提高控制可靠性。
一种定制出行交通系统的运行车辆位置定位技术方案,至少有以大型计算机(服务器)群为核心的【城市交通管理控制中心】;至少有由主通信信道、备用通信信道和应急信道为基本信道的通信子系统,有所述交通时间系和交通位置系构建的【信息神经系统】; 至少有【轨道系统】、【车站和车辆设备系统】、【乘用管理系统】、【运行保障系统】、【辅助车站设备系统】,至少有【城市交通管理控制中心】为每辆所述“专列”制定的所述“自出发地至目的地车辆运行方案”和对应的可实施控制的所述“车辆控制指令队列”,其特征是:
a.采用由上下无路基单轨道构建的轨道交通技术方案;
b.所有乘客都通过向实行集中统一控制的所述【城市交通管理控制中心】预约申请并经确认后按预约的约定乘车;
c.所有乘客均根据预约通过定制的专列由出发车站直接送达目的地车站;
d.所有乘客乘坐列车的运行方案都是由所述【城市交通管理控制中心】以交通系统整体运输效率最高作标准为乘客量身定制的;
e.投入使用的轨路支架在定制出行交通系统“交通位置系”中至少是“位置定位基准点”,都有系统中唯一的“地址编码”和位置参数,定制出行交通系统至少建有并及时更新轨路支架“基准点地理位置参数数据库”;
f.轨路支架上的迎运行车辆面两侧,均安装有能和车辆上光电通信装置(8)和装置(11)进行通信的光电通信装置(6)和装置(13);
g.运行“专列”通过一根轨路支架后,车辆上的光电通信装置(8)和装置(11)会主动发
送(指令+列车编码)的问询包,请求轨路支架上通信装置(6)和装置(13)告知此位置轨路支架的“列车编码”;
h.轨路支架上两侧有光信号接收单元和光信号发射单元(9)和单元(10),与车辆上的光信号接收单元和光信号发射单元(8)和单元(11)是同高度的,且互相构成“发射-接收”的非接触耦合器结构;车辆经过单元(9)和单元(10)位置时,车辆上的接收单元(8)和接收单元(11)及轨路支架上的接收单元(9)和接收单元(10)都会产生光电脉冲(15)和光电脉冲(16),给“专列”提供精准的车辆途经轨路支架Bi(x,y,z)时间,也给轨路支架的通信单元提供已知列车编号的“专列”途经支架Bi(x,y,z)的时间,上传所述【城市交通管理控制中心】,依据轨路支架的“地址编码”可从“基准点地理位置参数数据库”得到位置数据;
i.运行“专列”在运行中的实时位置Wi(x,y,z)是依据途经轨路支架“位置定位基准点”Bi(x,y,z)后的时间增量△t与“专列”已知速度v(x,y,z)的矢量积与基准点位置参数Bi(x,y,)之和,即:Wi(x,y,z)=Bi(x,y,z)+v(x,y,z)* △t。
一种定制出行交通系统的运行车辆位置定位技术方案,其特征是:
a.轨路支架内侧的光信号发射单元与同高度车辆上的接收单元、车辆上的光信号发射单元与同高度轨路支架内侧的接收单元结构上构成非接触动态耦合结构,车辆动态接近和通过时会在接收单元产生“基准点位置电脉冲信号”;
b.运行车辆通过轨路支架基准点的精准时间是通过计算“基准点位置电脉冲信号”的中心时间值加减速度为变量的修正值计算出来的。
附图说明
图1是获取运行车辆精准位置参数的实施例示意图。图1中,(3)是轨路支架的剖面图。(4)是运行中的“专列”示意图。(5)是轨路,上轨已被省略。(6)是安装在运行 车辆迎面侧轨路支架右侧上的有源光电通信装置。(8)是安装在每辆“专列”上的右侧光电 通信装置,其中包含与装置(6)进行双向通信的装置,也包括和右侧有源光电装置(9)进 行信息传输的有源光电单元。(7)代表有源光电通信装置(6)与有源光电通信装置(8)之 间的通信过程的空间信道。(9)是安装在轨路支架上的右侧有源光电装置,由光信号接收单 元和光信号发射单元构成,而且安装位置和车辆有相同的高度。(1)是用于测量相对距离的 有源光电装置及通信装置。(2)是列车运行时测量车辆(4)与装置(1)之间相对距离的光 信道示意图。(12)是“专列”上安装的测量本车辆与前方车辆相对距离的测距信道示意图。(14)是北斗或其他卫星定位系统示意图。(L)是轨路支架间的距离。图1中标注了与有源 光电装置(9)对应的有源光电装置(10),与有源光电通信装置(8)对应的有源光电通信 装置(11)。
图2是解释运动车辆精准获得轨路支架“位置定位基准点”参数的过程示意图。图中三根带t的箭头轴代表时钟轴。第1根时间轴为(车上光电通信装置)通过光信号发生器发出(指令+列车编码)的询问指令包时序信息示意图。第2根时间轴为(支架光电通信装置)通过光信号接收器接收到(指令+列车编码)询问指令包后返回(应答:地址编码)的应答包。第3根时间轴为(车上支架上光电通信装置)通过光信号发生器发出光信号在另一侧光接收产生光电脉冲的示意图。“专列”(4)驶过一根轨路支架(3)后,车上安装在两侧的(车上光电通信装置)(8)和(11)会主动向下一根轨路支架(3)上安装的(支架光电通信装置)发送一个读取地址编码的(指令+列车编码)询问指令包。轨路支架(3)上安装的(支架光电通信装置)在接收(指令+列车编码)询问指令包后,会立即回复一个(应答:地址编码)的应答包。“专列”途经安装在轨路支架内侧的光信号接收单元和光信号发射单元(9)或单元(10)时,轨路支架内侧的光信号发射单元和车辆上的光信号接收单元是互相光电耦合的,会在车辆接收单元中(车上支架上光电装置)时间轴上产生的(16)电接收脉冲信号。这个脉冲信号(16)的中心时间点(s1)能够精准代表车辆途经轨路支架“位置定位基准点”位置的精准时间。(15)是车辆途经前一根轨路支架时,车辆接收单元时间轴上产生的电接收脉冲信号,中心点s0代表车辆途经前一根轨路支架“位置定位基准点”位置的精准时间。
图3是车辆根据【城市交通管理控制中心】下传的“控制指令队列”和运用运行车辆精准定位技术方案实施自主自动控制的实施例示意图。图3中,(城市交通管理控制中心)是定制出行交通系统的【城市交通管理控制中心】;(车辆控制指令队列-车辆出发→目的地指令队列)是【城市交通管理控制中心】依据乘客的预约申请,为每个乘客定制“专列”的“自出发地至目的地车辆运行方案”及对应的“车辆控制指令队列-车辆出发→目的地指令队列”;(车辆控制单元)是车辆或列车中控制车辆运行的所有控制装置的总称,其中至少包括四个部分:①由【城市交通管理控制中心】在系统实时时钟到达下传的节点时间〈t0-td〉后,下传至车辆并已“统一投运”的可以在节点时间t0实施的(控制指令队列-出发→目的地);这个控制指令队列有:从时间节点t0,亦即车辆从(出发)地开始,一直到达(目的地)的全部控制所需要的指令和参数。其中有(已执行指令)(……),(正执行指令)(N+1……),(待执行指令)(……),(待执行指令)(N+m……)。②由车辆从外部(位置时基输入)通过传感器和信道,将“交通时间系”的(时间基准),动态变化的“交通位置系”中的(位置信息1)(……)(位置信息P)同时动态地加载到(车辆控制单元)。③比较控制装置。图1中,三角形是比较控制装置示意图,其输出控制(车辆运行参数调整)。④应急控制。图1中,(城市交通管理控制中心)专门设计有(最高优先级的实时控制指令)可以优先对所有需要控制的车辆、配套设施实施直接控制。
具体实施方式
以下结合图3说明分散“专列”通过“车辆控制指令队列”和应用运行车辆精准定位技术方案实施自主自动控制的过程。
图3是车辆根据【城市交通管理控制中心】下传的“控制指令队列”和运用运行车辆精准定位技术方案实施自主自动控制的实施例示意图。图3中,(城市交通管理控制中心)是定制出行交通系统的【城市交通管理控制中心】;(车辆控制指令队列-车辆出发→目的地指令队列)是【城市交通管理控制中心】依据乘客的预约申请,为每个乘客定制“专列”的“自出发地至目的地车辆运行方案”及对应的“车辆控制指令队列-车辆出发→目的地指令队列”;(车辆控制单元)是车辆或列车中控制车辆运行的所有控制装置的总称,其中至少包括四个部分:①由【城市交通管理控制中心】在系统实时时钟到达下传的节点时间〈t0-td〉后,下传至车辆并已“统一投运”的可以在节点时间t0实施的(控制指令队列-出发→目的地);这个控制指令队列有:从时间节点t0,亦即车辆从(出发)地开始,一直到达(目的地)的全部车辆控制所需要的指令和参数。其中有(已执行指令)(……),(正执行指令)(N+1……),(待执行指令)(……),(待执行指令)(N+m……)。②由车辆从外部(运行车辆定位)通过传感器和信道,将“交通时间系”的(时间基准),动态变化的“交通位置系”中的(位置信息1)(……)(位置信息P)同时动态地加载到(车辆控制单元)。③比较控制装置。图3中,三角形是比较控制装置示意图,其输出控制(车辆运行参数调整),最终实现车辆在“交通时间系”每个节点时间精准到达【城市交通管理控制中心】规划设定的指定位置,实现通过车辆自主控制完成由【城市交通管理控制中心】集中统一控制定制出行交通系统所有车辆的目的。④应急控制模块。
在正常运行状态下,各车辆通过自主实施由【城市交通管理控制中心】集中统一制定的(车辆控制指令队列)完成由【城市交通管理控制中心】的集中统一控制。而一旦发生计划外的应急事件时,【城市交通管理控制中心】会启动高优级的直接控制:图3中,(城市交通管理控制中心)专门设计有(最高优先级的实时控制指令)可以优先对所有需要控制的车辆、配套设施实施直接控制。
在车辆自开始出发时间节点t0开始,逐一实施“车辆控制指令队列”中每条指令,其中最核心控制是“交通时间系”中每个节点时间“专列”应该准时到达“车辆控制指令队列”要求到达“交通位置系”中指定的位置。本发明运行车辆利用卫星定位时钟作为交通系统时钟同步源和本发明精准定位技术方案提供了车辆运行状态下的统一时钟和精准位置参数。
分散且自我自动控制的“专列”(车辆控制单元)不仅需要“车辆控制指令队列”的指令和控制参数,还需要“交通时间系”的精准时间和运动车辆在“交通位置系”的精准位置信息。现结合图1和图2作进一步说明。本发明建立“交通时间系”是利用卫星定位已有的精准时钟作为【城市交通管理控制中心】的时钟基准源,而定制出行交通系统真正的“交通时间系”仍然是由【城市交通管理控制中心】自身统一发布的,保持系统的独立性和完整性。本发明建立“交通位置系”是利用遍布定制交通系统的有固定地理位置的轨路支架、车站、车辆电梯。其中,特别是轨路支架,不仅有相对标准的间距,还在分布上伴随轨路亦即伴随运行车辆均布。本发明充分利用:已有建设且轨路支架间距只有10m~20m的特点,通过精准标定每个轨路支架在“交通位置系”中的唯一支架编码和精准坐标Bi(x,y,z)参数,获得了稳定且精准的运行车辆位置:Wi(x,y,z)=Bi(x,y,z)+v(x,y,z)*△t;方法简单,成本低,定位精度高。基于以下评估:①轨路支架“交通位置系”的位置坐标Bi(x,y,z)静态标定精度可达cm级。②轨路平直,列车运行速度稳定。③交通系统有条件通过精准测试,获得系统中任一路段的v(x,y,z)参数。据此,依据公式Wi(x,y,z)=Bi(x,y,z)+v(x,y,z)*△t确定的运行车辆位置精度可以在10cm以内水平。这对于大范围交通控制系统而言,已经是大大超出设计要求的高指标。
发明效果:一种定制出行交通系统的运行车辆位置定位技术方案,充分利用支撑无路基轨路的轨路支架间距近且遍布车辆运行所有角落的已有条件,把每个轨路支架变成“位置定位基准点”,设定定制出行交通系统内唯一“地址编码”并精准测定“交通位置系”中的位置坐标。“专列”途径任何一个“位置定位基准点”后都可以通过基准点精准坐标参数加上车辆运行矢量速度和时间增量的向量积计算出运行车辆的精准位置。这个技术方案,充分利用了系统已有的设备,不仅运动中的定位精度高,实现了发明的目标,而且结构简单,实施容易,运行可靠,可以在定制出行交通系统中广泛应用。