一种廊桥节点采集方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及航班保障领域,尤其涉及一种廊桥节点采集方法。
背景技术
航班保障节点是指航班在机场进行地面保障的进度,航班保障是机场的重要职能,各航班地面保障的实时进度信息是在机场和空管部门为各个航班分配停机位、保障车辆、保障人员和飞行时刻的主要依据。现阶段航空器地面保障节点采集工作中多数机场使用人工录入的方式,这种状态下的信息采集,误报漏报的情况较多,数据不准确的情况也比较多,另外在夏季温度较高的地区和冬季温度较低的地区的外场节点采集工作难度也更高。各机场都在开展航班保障自动节点采集技术的研发工作,开始采用AI智能的方式,利用摄像头的影像数据来识别节点。截至目前基于AI智能影像数据识别节点的技术经过实地测试和实践发现,这种方式存在较多弊端:1)受天气影响较大,雨、雪、雾霾等天气都会影响影像数据的基础采集;2)受摄像头配置的影响,不同型号和精度的摄像头对采集数据影像较大,数据结果不一致;3)远机位摄像头布设位置成为难题;4)受摄像头位置、系统学习过程和能力所限,不能覆盖航班保障过程的全部节点。
发明内容
本发明的目的在于解决背景技术所指出的技术问题,提供一种廊桥节点采集方法,通过距离传感器采集距离传感器与航空器之间的距离,然后根据距离传感器与航空器之间的距离来判断航空器各保障节点位置,可实现各保障节点的智能化采集,并能确保采集数据的准确性。
本发明的目的通过下述技术方案实现:
一种廊桥节点采集方法,包括以下步骤:
A.将距离传感器安装在廊桥上的操作台背面并面向廊桥与航空器舱门的对接口;
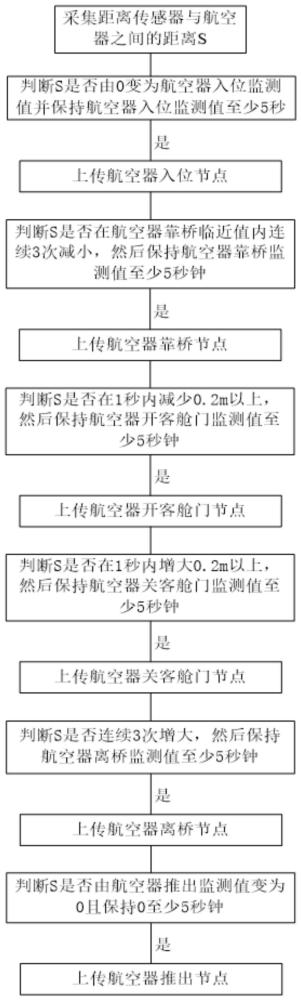
B.距离传感器与航空器之间的距离设为S,判断S是否由0变为航空器入位监测值并保持航空器入位监测值至少5秒,若是,则上传航空器入位节点;
C.判断S是否在航空器靠桥临近值内连续3次减小,然后保持航空器靠桥监测值至少5秒钟,若是,则上传航空器靠桥节点;
D.判断S是否在1秒钟内减少0.2m以上,然后保持航空器开客舱门监测值至少5秒钟,若是,则上传航空器开客舱门节点;
E.判断S是否在1秒钟内增大0.2m以上,然后保持航空器关客舱门监测值至少5秒钟,若是,则上传航空器关客舱门节点;
F.判断S是否连续3次增大,然后保持航空器离桥监测值至少5秒钟,若是,则上传航空器离桥节点;
G.判断S是否由航空器推出监测值变为0且保持0至少5秒钟,若是,则上传航空器推出节点。
优选地,距离传感器采集距离信号的频率为1秒钟一次,且距离传感器为激光传感器。
优选地,判断的步骤由控制盒完成,控制盒内设置有与距离传感器相连接的微控制器MCU,微控制器MCU接收距离传感器输出的S数据并进行判断,然后将判断结果上传至服务器。
优选地,航空器入位监测值为4m~12m。
优选地,航空器靠桥临近值为1m~4m,航空器靠桥监测值为0.9m~1.7m。
优选地,航空器开客舱门监测值为0.4m~1.3m。
优选地,航空器关客舱门监测值为1.2m~1.7m。
优选地,航空器离桥监测值和航空器推出监测值均为4m~12m。
优选地,控制盒上设置有与微控制器MCU相连接4G模块。
优选地,控制盒设置在廊桥上的操作台背面,距离传感器通过收发模块USART与微控制器MCU相连接。
本发明较现有技术相比,具有以下优点及有益效果:
(1)本发明的采集方法不仅步骤简单,方便操作,通过距离传感器采集距离传感器与航空器之间的距离,然后根据距离传感器与航空器之间的距离来判断航空器各保障节点位置,可实现各保障节点的智能化采集,还能确保采集数据的准确性。
(2)本发明的距离传感器采集距离信号的频率为1秒钟一次,则距离传感器可以1秒钟一次的频率输出距离值S,可便于根据距离值S的变化判断航空器的动作和状态,从而确定航空器的保障节点。
(3)本发明判断的步骤由控制盒完成,控制盒内设置有与距离传感器相连接的微控制器MCU,从而可通过微控制器MCU接收距离传感器输出的S数据并进行廊桥节点的判断,还可将判断结果上传至服务器。
(4)本发明的航空器入位监测值、航空器靠桥监近值、航空器靠桥监测值、航空器开客舱门监测值、航空器关客舱门监测值、航空器离桥监测值以及航空器推出监测值是根据航空器机型和停机位来确定的,将航空器入位监测值设为4m~12m,航空器靠桥临近值设为1m~4m,航空器靠桥监测值设为0.9m~1.7m,航空器开客舱门监测值设为0.4m~1.3m,航空器关客舱门监测值设为1.2m~1.7m,航空器离桥监测值和航空器推出监测值均是为4m~12m是充分考虑到民航机场适用的不同航空器机型和停机位的设置。
(5)本发明的控制盒上设置有与微控制器MCU相连接4G模块,可便于微控制器MCU通过4G网络通信连接的方式实现与服务器之间的无线通信连接。
(6)本发明的控制盒设置在廊桥上的操作台背面,距离传感器通过收发模块USART与微控制器MCU相连接,以确保距离传感器能更好地将S数据传输至微控制器MCU。
附图说明
图1为本发明廊桥节点采集的流程图。
具体实施方式
下面结合实施例对本发明作进一步地详细说明:
实施例
如图1所示,本发明的廊桥节点采集方法,包括以下步骤:
A.将距离传感器安装在廊桥上的操作台背面并面向廊桥与航空器舱门的对接口,以便于通过距离传感器采集距离传感器与航空器之间的距离数据,从而获得廊桥节点信息。
B.距离传感器与航空器之间的距离设为S,判断S是否由0变为航空器入位监测值并保持航空器入位监测值至少5秒,若是,则上传航空器入位节点。本发明的距离传感器采用的是激光传感器,激光传感器通过发出脉冲激光到航空器上再返回激光传感器的方式测量数据并输出S值,在航空器进入机位前,激光传感器发出的脉冲激光无法发送到航空器上,因此测量不到数据,激光传感器输出的距离值为0。当航空器进入机位后,激光传感器发出的脉冲激光遇到航空器时则会被反射回激光传感器,激光传感器接收到反射回来的脉冲激光则可计算出S值。
本发明采用控制盒来完成对S的判断,控制盒设置在廊桥上的操作台背面,控制盒内设置有微控制器MCU,激光传感器通过收发模块USART与微控制器MCU相连接,从而将计算得出的距离值S发送至微控制器MCU,本发明的微控制器MCU采用STM32F407VET6芯片来实现。其中,航空器入位监测值根据航空器机型和停机位来确定,本发明考虑到民航机场适用的不同航空器机型和停机位的设置,将航空器入位监测值设置为4m~12m,S由0变为航空器入位监测值则表示航空器在进行入位的动作。本发明的距离传感器采集距离信号的频率为1秒钟一次,距离传感器则1秒钟向微控制器MCU发送一次距离值S,保持航空器入位监测值至少5秒,则需要距离传感器采集距离信号至少连续5次得出的S值在4m~12m之间,即可判断为航空器入位节点,微控制器MCU则上传航空器入位节点至服务器。本发明控制盒上设置有与微控制器MCU相连接4G模块,微控制器MCU通过4G网络通信连接的方式实现与服务器之间的无线通信连接。
C.判断S是否在航空器靠桥临近值内连续3次减小,然后保持航空器靠桥监测值至少5秒钟,若是,则上传航空器靠桥节点。判断S是否在航空器靠桥临近值内连续3次减小步骤中的连续3次指的是距离传感器连续3次采集距离信号,则可输出连续三个S值,则判断连续三个S值是否在航空器靠桥临近值内连续减小。本发明的航空器靠桥临近值设为1m~4m,航空器靠桥监测值设为0.9m~1.7m。
D.判断S是否在1秒钟内减少0.2m以上,然后保持航空器开客舱门监测值至少5秒钟,若是,则上传航空器开客舱门节点。本发明设置为1秒钟内减少0.2m以上是为了突出S值短时间内大幅度减小,据此来判断航空器的动作和状态,距离传感器可以采用采集距离信号的频率为1秒钟一次的传感器,此时距离传感器采集的相邻两个距离信号的时间正好相隔1秒钟;若距离传感器采用的是采集距离信号的频率为1秒钟多次的传感器,此时判断S是否在1秒钟内减少0.2m以上;若距离传感器采用的是采集距离信号的频率为超过1秒钟一次的传感器,此时距离值S变化的最短时间为相邻两个采集距离信号的间隔时间,此时判断S是否在相邻两个采集距离信号的间隔内减少0.2m以上。本发明的航空器开客舱门监测值设为0.4m~1.3m。
E.判断S是否在1秒钟内增大0.2m以上,然后保持航空器关客舱门监测值至少5秒钟,若是,则上传航空器关客舱门节点。判断S是否在1秒钟内增大0.2m以上的步骤中的1秒钟时间可以根据采用的距离传感器采集距离信号的频半来确定,如步骤D中所述,航空器关客舱门监测值设为1.2m~1.7m。
F.判断S是否连续3次增大,然后保持航空器离桥监测值至少5秒钟,若是,则上传航空器离桥节点。判断S是否连续3次增大步骤中的连续3次如步骤C中所述的距离传感器连续3次采集距离信号,则可输出连续三个S值,则判断连续三个S值是否在航空器离桥监测值内连续增大,航空器离桥监测值也设为4m~12m。
G.判断S是否由航空器推出监测值变为0且保持0至少5秒钟,若是,则上传航空器推出节点。航空器推出监测值设为4m~12m,航空器推出后距离传感器测量不到与航空器之间的距离数据,距离传感器输出的距离值S为0。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种综合管廊组合节点的施工方法
- 一种用于木廊桥柱子保护结构的施工方法
- 一种大跨度木廊桥修建用吊装装置及方法
- 一种管廊节段的移位系统及应用移位系统的管廊安装方法
- 基于互联网的管廊信号采集节点执行控制器及其监控方法
- 一种多通道分布式节点采集方法、可复用方法及采集节点